
基于五段式SVPWM的永磁同步电机反馈线性化直接转矩控制
2016-02-18 00:26邱赫男王旭东李志伟那日沙
哈尔滨理工大学学报 2015年6期
关键词:永磁同步电机
邱赫男 王旭东 李志伟 那日沙
摘要:针对永磁同步电机(PMSM)直接转矩控制系统存在转矩和磁链脉动较大的问题,引入反馈线性化理论,结合空间矢量脉宽调制技术(SVPWM),提出了使原系统实现输入输出线性化控制的改进方法。首先分析了控制系统实现反馈线性化的条件,给出了线性化系统控制模型,采用五段式SVPWM的控制算法,最后与传统直接转矩控制系统进行了仿真对比。结果表明,基于SVPWM的永磁同步电机反馈线性化直接转矩控制系统显著抑制了转矩和磁链的脉动,并且具有理想的动静态性能。
关键词:永磁同步电机;直接转矩控制;反馈线性化;SVPWM
中图分类号:TM341 文献标志码:A 文章编号:1007-2683(2015)06-0065-06
0 引言
永磁同步电机的直接转矩控制凭借着良好的动态性能和较强的鲁棒性,受到了国内外电力电子技术界和产业界的广泛关注。传统的直接转矩控制采用bang-bang控制策略,这使得转矩和磁链脉动很大。为此,国内外学者在近年来做了大量的研究。西安交大何栋炜等人采用了卡尔曼滤波磁链观测器对磁链进行估计,这种方法减小了转矩脉动。美国威斯康星大学电气工程系的Robert D.Lorenz教授提出了无差拍直接转矩和磁链控制(DB-DFTC)控制方法。Wei Xu提出一种低开关频率下的无差拍直接转矩控制器,使得开关损耗达到了最小化。
永磁同步电机的数学模型具有多变量、强耦合的非线性特点,反馈线性化方法能通过对系统进行坐标变换和状态反馈,在输入与输出之间建立线性关系,从而将非线性系统转变成线性系统,实现系统解耦。通过反馈线性化技术获得的线性模型是精确的状态变换的结果,这样就可以采用线性化理论来设计控制器。
SVPWM技术作为一种优化的PWM技术,能明显的减小逆变器输出电流的谐波成分,降低脉动转矩,且其控制简单,数字化实现方便,电压利用率高。SVPWM技术中两个零矢量的不同分配方案会产生多种调制方式,其中交替使用两个零矢量的五段式SVPWM能有效地减小开关损耗。
本文以永磁同步电机为研究对象,应用微分几何方法推导出PMSM直接转矩控制系统可以进行反馈线性化的条件,得到相应的反馈线性化模型。结合这个模型构造状态反馈控制器,将得到的反馈控制量输入到SVPWM中,实现对电机的控制。对模型系统进行仿真验证,并给出相同参数下传统直接转矩控制永磁同步电机的比较结果。
1 永磁同步电机直接转矩控制系统数学模型和反馈线性化条件
1.1 永磁同步电机数学模型
其中ψs=ψd+jψq,是定子磁链矢量,is=id+jiq是定子电流矢量,us=ud+juq是定子电压矢量,ψPM是永磁体磁链,ωr是转子角速度,Rs是定子电阻,对于隐极式永磁电机电感Ls=Ld=Lq。
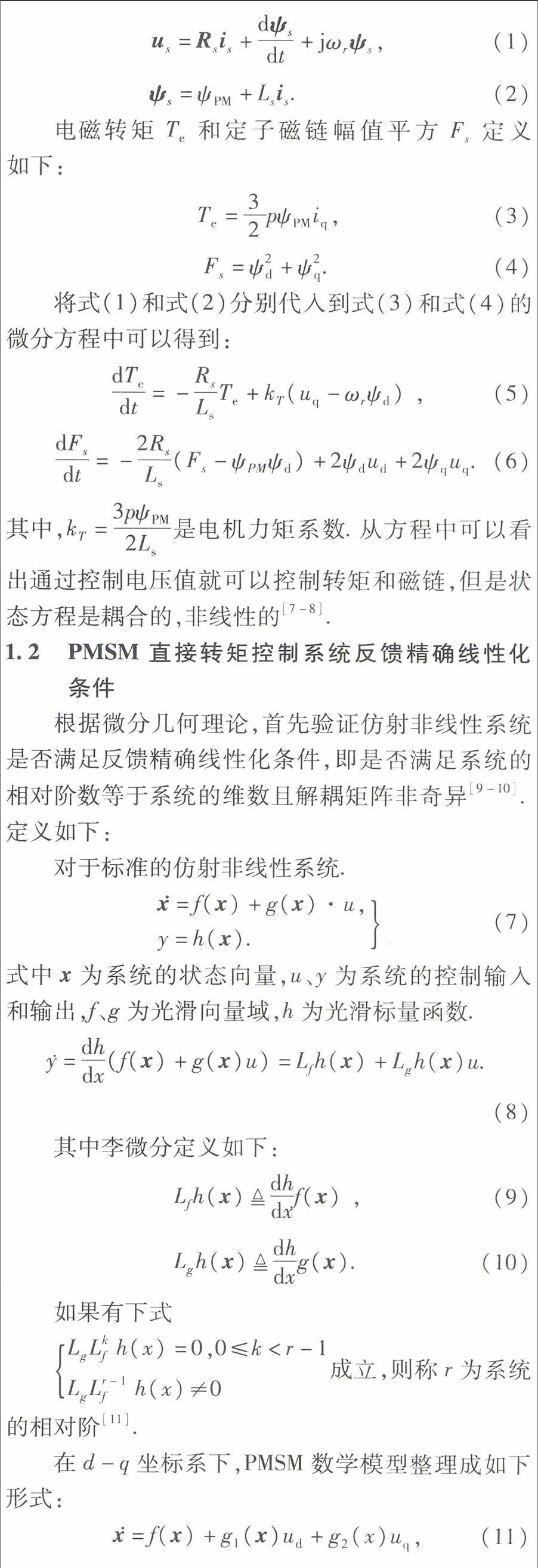
电磁转矩Te和定子磁链幅值平方Fs定义如下:
将式(1)和式(2)分别代入到式(3)和式(4)的微分方程中可以得到:出通过控制电压值就可以控制转矩和磁链,但是状态方程是耦合的,非线性的。
1.2 PMSM直接转矩控制系统反馈精确线性化条件
根据微分几何理论,首先验证仿射非线性系统是否满足反馈精确线性化条件,即是否满足系统的相对阶数等于系统的维数且解耦矩阵非奇异。定义如下:
对于标准的仿射非线性系统。式中x为系统的状态向量,u、y为系统的控制输入和输出,f、g为光滑向量域,h为光滑标量函数。其中李微分定义如下:如果有下式
在d-q坐标系下,PMSM数学模型整理成如下形式:
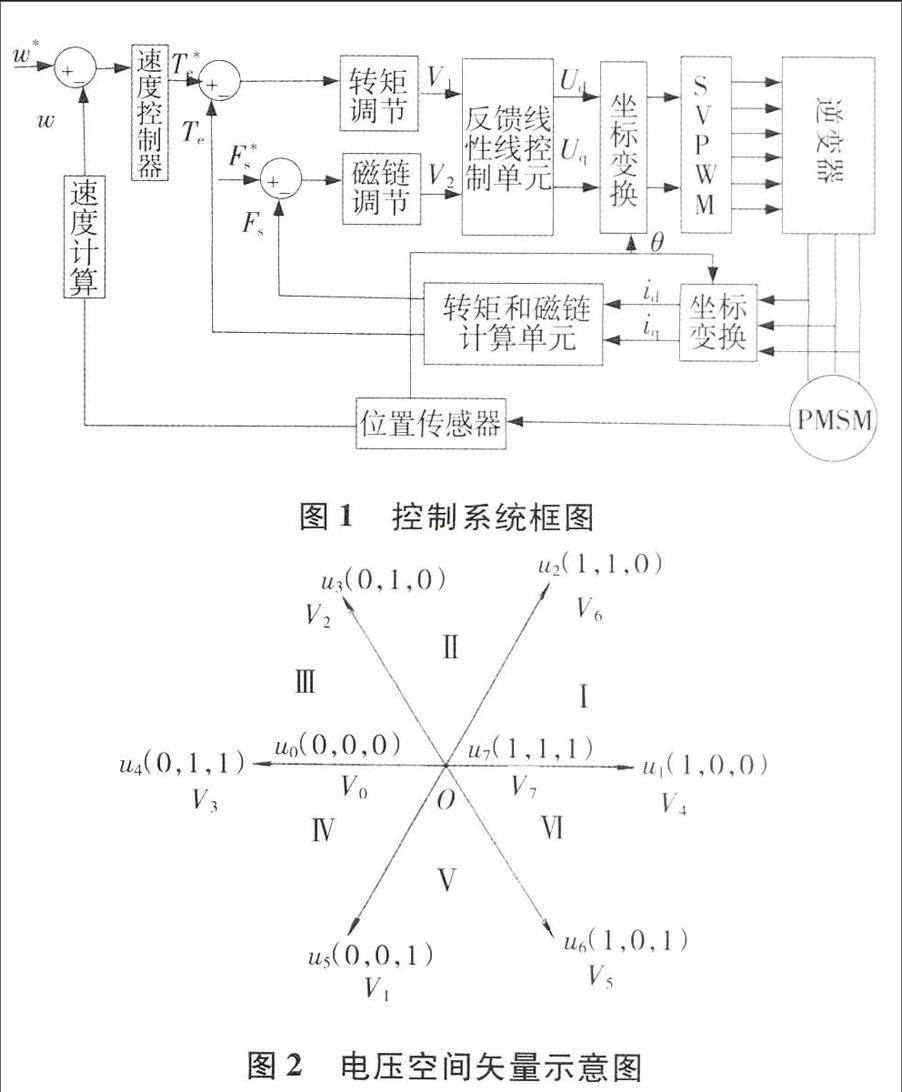
控制系统框图如图1所示。该控制系统由反馈线性化控制单元、转矩调节、磁链调节、转矩和磁链计算单元、坐标变换及SVPWM模块构成。电机定子侧相电流ia、ib、ic与转子角位置θ相结合,经过坐标变换得到两相旋转电流id和iq,id和iq经过转矩和磁链计算单元得到转矩Te和磁链Fs。给定转速ω*与反馈转速ω相比较,经过速度控制器得到转矩T*e,T*e与计算单元得到的转矩Te相比较,经过转矩调节器得到控制量V1。给定磁链F*e与计算单元得到的磁链Fs相比较,经过磁链调节器得到另一个控制量V2。V1和V2经过反馈线性化单元得到d轴和q轴的电压Ud、Uq再和转子角位置θ相结合,经过坐标变换得到两相静止电压Uα和Uβ,再经过SVPWM模块得到六路脉冲驱动逆变器,进而控制永磁同步电机。
3 SVPWM算法实现
SVPWM的理论基础是平均值等效原理,即在一个开关周期内通过对基本电压矢量加以组合,使其平均值与给定电压矢量相等。
本文采用电压矢量合成法实现SVPWM。如上图2所示,在某个时刻,电压空间矢量旋转到某个区域中,可由组成这个区域的两个相邻的非零矢量和零矢量在时间上的不同组合来得到。先作用的称为主矢量,后作用的称为辅矢量,作用的时间分别为T1和T2。以扇区I为例,空间矢量合成示意图如图3所示。以在高调制指数下运行。考虑到五段式SVPWM的开关次数为七段式的2/3,减小了1/3的开关损耗,因此本文采用五段式SVPWM。扇区波形图如图4所示。
4 仿真对比实验
本文使用Matlab环境下的Simulink对所建控制系统模型进行仿真所选永磁同步电机参数为:Rs=0.9585Ω,Ld=Lq=0.00525H,极对数4,永磁体磁链为0.1827Wb进行如下仿真研究:系统以转速1000r/min,空载启动,在0.04s时转速由1000r/min升至1500r/min,在0.08s时由空载突变为5N·m,参考磁链为0.27Wb,k1=k2=6000,仿真框图如图5(a)和图5(b)所示,所得的转速响应曲线与传统直接转矩控制系统的对比如图6中(a)、(b)、(c)、(d)、所示,转矩响应曲线对比如图7中(a)、(b)、(c)、(d)、所示以及磁链轨迹圆与传统直接转矩控制系统的对比如图8中(a)、(b)所示。
从仿真波形可以看出,系统精确线性化以后,电机速度在0.01s之内迅速达到稳态,跟踪性能非常理想,几乎没有超调;当电机负载转矩从0跃变为5N·m时,系统速度、转矩可以在很短时间内到达给定值;转矩瞬时跟踪给定负载,其鲁棒性能理想;磁链在瞬间达到稳定,在整个过程中不受外加负载以及速度变化的影响,在整个运行期间完全保持恒定。由此可见,相同条件下基于五段式SVPWM的永磁同步电机反馈线性化直接转矩控制系统的磁链和转矩的脉动要小于传统直接转矩控制系统,而且这种控制系统具有更好的动、静态性能。
5 结论
本文阐述了基于五段式SVPWM的永磁同步电机反馈线性化直接转矩控制系统的实现方法。对永磁同步电机的数学模型进行坐标变换和状态反馈,使电机的转矩和磁链解耦,从而实现对转矩和磁链的线性化控制。仿真结果表明,基于五段式SVPWM及反馈线性化方法设计的永磁同步电机直接转矩控制系统跟踪性能快速精确,抗干扰能力强,鲁棒性能优越,有效地改善了传统控制方法中转矩和磁链脉动较大的问题,而且具有更好的动、静态性能。
(编辑:王萍)
猜你喜欢
现代电子技术(2017年1期)2017-02-16
汽车工程学报(2016年5期)2017-01-16
计算技术与自动化(2016年4期)2017-01-11
电脑知识与技术(2016年13期)2016-06-29
科技视界(2016年12期)2016-05-25
电脑知识与技术(2016年2期)2016-03-22
电脑知识与技术(2016年1期)2016-03-22
科技与创新(2016年1期)2016-01-19
哈尔滨理工大学学报(2015年3期)2015-09-21
科技与创新(2015年18期)2015-09-11
