
永磁同步电动机自抗扰控制器设计
2016-05-25 11:07石一飞沈宇桐王玉
科技视界 2016年12期
石一飞 沈宇桐 王玉
【摘 要】针对永磁同步电机矢量控制系统存在的参数鲁棒性差、抗负载扰动性能差的缺陷,基于自抗扰控制原理,设计一种可以取代经典PI控制器的速度环自抗扰控制器,该控制器估计系统的总扰动并进行前馈补偿。Simulink仿真结果表明,自抗扰控制较常规PI控制有较好的动态性能及较强的抗负载扰动能立和鲁棒性。
【关键词】自抗扰控制器;永磁同步电机;矢量控制;速度控制
永磁同步电机具有响应快、效率高、转矩惯性比大和运行可靠性高等优点,是高性能传动和伺服系统执行机构的最佳选择之一,得到广泛的应用。如机械工具、工业机器人、航空、航天、特种机床等场合。永磁同步电机矢量控制的性能指标主要通过速度环反映出来,要求速度控制调速范围宽、响应快、精度高,尤其是要求速度环控制对系统参数变化和负载扰动具有很强的鲁棒性。传统的永磁同步电机矢量控制方法借鉴早期的模拟式系统把速度环控制器设计为PI或者PID控制器,性能上满足了工程应用的基本要求,方法上简单易行,获得广泛的应用。但是电机本身是多变量、强耦合、非线性的控制对象,基于经典控制理论的控制器在参数匹配良好的情况下性能良好,但是出现系统参数变化或者负载扰动,将导致系统控制性能性能下降,动态响应和抗扰能力不能得到很好地兼顾。近些年各种非线性控制方案相继出现,如人工智能、无源控制、滑模控制、反推控制等,但是这些方法控制器往往较为复杂而且都是基于对象模型设计的,限制了其在实际中的应用。
自抗扰控制是20世纪90年代我国韩京清研究员吸取现代控制理论的成就和发扬PID基于误差反馈消除误差控制精髓,提出的能够替代PID控制技术的、不依赖被控对象精确模型的新型实用的数字控制技术,在化工、电力、航天等领域得到推广和应用。它将系统参数变化和外界扰动形成的总扰动通过观测器观测并进行补偿,具有很强的鲁棒性,能较好的克服传统PI控制器快速性和超调、快速性与抗扰动性能矛盾。鉴于自抗扰控制器需要整定的参数多、整定困难,本文采用Simulink仿真自抗扰控制算法,寻求自抗扰控制算法的参数整定方法,并与PI控制器进行比较研究,验证方案的有效性。
1 自抗扰控制算法
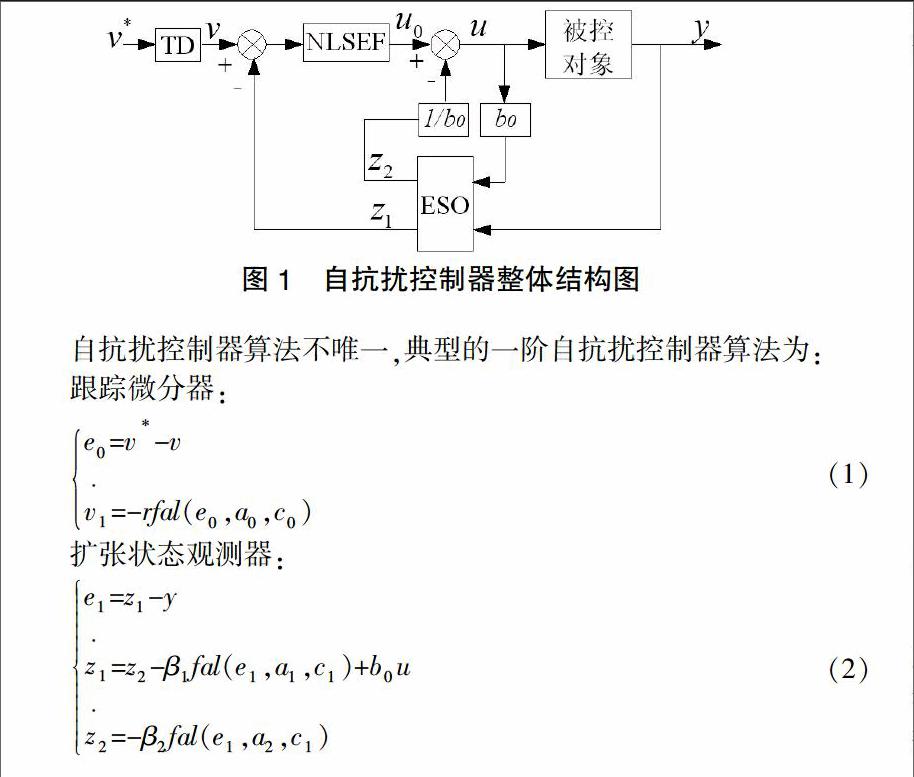
自抗扰控制器对经典的PID控制进行优化,采用“用误差反馈消除误差”的核心理念,把作用于被控对象的所有不确定因素都归为“未知扰动”,用被控对象的电压、电流等对它进行估计并补偿,不需要外扰动的模型。包括跟踪微分器(TD)、扩张状态观测器(ESO)和非线性状态误差反馈控制律(NLSEF)三部分,如图1所示。
自抗扰控制器算法不唯一,典型的一阶自抗扰控制器算法为:
2 仿真结果
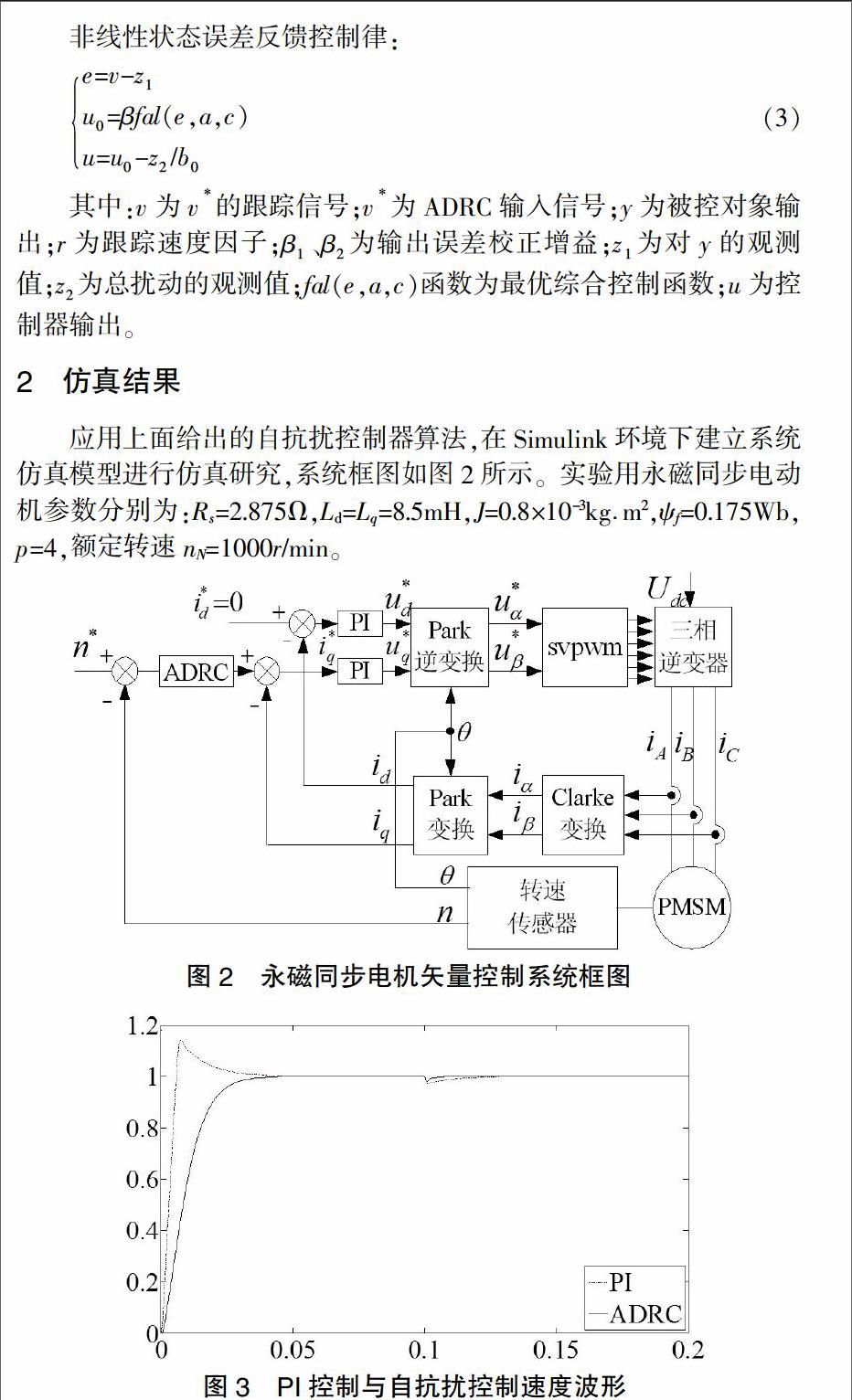
应用上面给出的自抗扰控制器算法,在Simulink环境下建立系统仿真模型进行仿真研究,系统框图如图2所示。实验用永磁同步电动机参数分别为:Rs=2.875Ω,Ld=Lq=8.5mH,J=0.8×10-3kg﹒m2,ψf=0.175Wb,p=4,额定转速nN=1000r/min。
给定转速1000r/min,系统空载起动,为观察系统抗负载扰动能力,t=0.1s时突加3N·m负载转矩。图3为速度环采用PI控制器和自抗扰控制器的速度响应曲线。可见,PI控制速度有较大超调,突然加负载时速度降落略大,速度恢复时间较长,而自抗扰控制器响应快、无超调,抗负载扰动能力和鲁棒能力较强,对系统无较大的损害。
3 结论
自抗扰控制是一种不依赖对象动态模型结构,但是允许对象存在不确定性的控制方案,本文在矢量控制系统基础上进行速度环控制算法的研究,将自抗扰控制引入永磁同步电机速度环控制取代传统PI控制器。仿真结果表明该方法抗负载扰动、鲁棒性和自适应性均较强,具有优良的动、静态性能。
【参考文献】
[1]刘英培,栗然,梁海平.基于最小二乘支持向量机优化自抗扰控制器的永磁同步电机直接转矩控制方法[J].中国电机工程学报,2014,27:4654-4664.
[2]薛树功,瞿成明,魏利胜.永磁同步电机自抗扰控制研究[J].安徽工程大学学报,2011,04:44-46.
[3]王超,李世华,田玉平.基于自抗扰技术的永磁同步电机直接转矩控制[J].电气传动,2007,07:14-17.
[4]孙凯,许镇琳,盖廓,邹积勇,窦汝振.基于自抗扰控制器的永磁同步电机位置伺服系统[J].中国电机工程学报,2007,15:43-46.
[5]林大鹏,扈宏杰.基于ARDC控制方法的电动舵机控制系统[J].自动化应用,2016,01:21-22+24.
[6]黄庆,黄守道,伍倩倩,等.基于模糊自抗扰控制器的永磁同步电动机伺服系统[J].电工技术学报,2013,09:294-301.
[责任编辑:杨玉洁]
猜你喜欢
汽车工程学报(2016年5期)2017-01-16
计算技术与自动化(2016年4期)2017-01-11
中小企业管理与科技·上旬刊(2016年10期)2016-11-15
科技资讯(2015年19期)2015-10-09
