电动汽车用永磁同步电动机转子位置自检测控制系统
2016-02-24 09:38周香珍
微特电机 2016年12期
周香珍, 张 顺
(1.南京理工大学 泰州科技学院, 泰州 225300;2.江苏省电力公司检修分公司,南京 210000)
电动汽车用永磁同步电动机转子位置自检测控制系统
周香珍1, 张 顺2
(1.南京理工大学 泰州科技学院, 泰州 225300;2.江苏省电力公司检修分公司,南京 210000)
针对现有位置自检测技术存在的问题,研究了一种永磁同步电动机转子位置自检测复合控制算法。该算法不仅具有良好的鲁棒性,而且能够在全速包括零速范围内具有很好的位置跟踪效果。基于所提出的控制算法,搭建了电动汽车用永磁同步电动机转子位置自检测控制系统模型,并通过仿真和实验测试验证了该控制算法在全速范围内估算位置的有效性。
电动汽车;永磁同步电动机;矢量控制;位置自检测控制
0 引 言
由于电动汽车具有无污染、噪声低、能源利用多元化和高效化等显著优点,其在汽车产业中倍受青睐[1]。电机驱动系统作为电动汽车核心技术之一,因此有必要对电机驱动系统加以研究。相对于其它类型的电机,永磁同步电动机具有高效率、高功率密度、高可靠性以及宽调速等优点而广泛应用到电动汽车驱动系统中[2]。
目前,在电动汽车领域中,大多数采用的是基于矢量控制的永磁同步电动机驱动系统。为了实现电动汽车用永磁同步电动机驱动控制系统的高精度和高动态性能,就需要在控制过程中利用位置传感器来检测电机转子的位置和速度。然而额外的位置传感器在使用时会带来高成本、低可靠性以及应用范围受环境所限等缺点[3-4]。位置自检测控制技术是利用电机绕组的电压和电流信号,估算出电机转子位置和速度,以替代位置传感器。由于位置自检测控制技术可以有效地解决位置传感器带来的问题,近年来得到国内外学者的广泛研究。
目前,适用于无刷交流永磁同步电动机转子位置自检测的方法通常分为两类,一类是适用于中高速运行时的转子位置自检测技术[5-7],另一类是适用于零速和低速时的转子位置自检测技术[8-10]。第一类检测方法通常是直接或者间接地基于反电动势来估算转子位置信号,该类方法主要包括基于反电动势或定子磁链的开环估算方法、模型参考自适应法、状态观测器、扩展卡尔曼滤波器、滑模观测器和基于人工智能理论的位置检测算法。基于反电动势或定子磁链的估算方法仅依赖于电机的电压方程,比较容易实现,但是对参数变化比较敏感,低速时误差较大;模型参考自适应法估算出的位置精度和模型的选取有关,同时受电机的参数影响较大,但该算法中的估算参数能够渐近收敛,并具有良好的动态性能;状态观测器的优点有鲁棒性强以及稳定性好,然而该算法相对复杂,同时计算量较大,并且还对负载变化较敏感;扩展卡尔曼滤波器的优点有准确性高以及稳定性好,但是此算法需要矩阵求逆运算,计算量大并且复杂;滑模观测器显著的优势是鲁棒性很好,但是该算法由于存在不连续开关控制,从而导致系统抖振;基于人工智能理论的位置检测算法目前还不够完善,而且算法复杂、计算量过大,所以很难适用于电动汽车的产业化中。第二类检测方法能够有效解决电机低速运行时转子位置估算不准确的问题,该类方法主要包括基于电感变化的位置估算法和高频信号注入法。基于电感变化的位置估算法本质上是一种开环计算法,其收敛性能得不到可靠的保证,尤其在磁路饱和时电感发生变化的情况下,位置偏差会很大;高频信号注入法利用电机磁路的凸极特性对高频载波信号调制,再对电流解调提取转子的位置信息。
文献[11]针对传统滑模观测器的抖振问题,提出了一种基于宽速滑模观测器的无位置传感器控制算法,该算法无需低通滤波器,并且可以提高电机低速时转子位置的估算精度,但是仍无法解决电机零速运行问题。文献[12]对比了两种基于高频注入法的无位置传感器控制算法,但仍然无法保证电机中高速运行时的良好性能。因此,研究一种适用于全速范围的位置自检测控制技术非常关键。本文提出一种转子位置自检测复合控制算法,将新型滑模观测器和脉振高频注入法相结合,不但鲁棒性好,而且能够在全速包括零速范围内具有较好的位置跟踪效果。
1 新型滑模观测器
1.1 反电势观测器设计
永磁同步电动机的反电势方程:
(1)
(2)
根据式(2),可构造反电势观测器:
(3)
将式(3)与式(2)作差,得到反电势观测器的误差方程:
(4)

为证明式(4)稳定性,由Lyapunov定理,有:
(5)
对上式求导得:
(6)
将式(4)代入上式整理可得:
(7)
由式(7)可见,该反电势观测器是渐近稳定的。
1.2 新型滑模观测器设计
永磁同步电动机电压方程可表示:
(8)
采用sigmoid函数为滑模变结构函数,则:
(9)
定义变结构系统:
(10)
将式(9)与式(8)相减,可得到新型滑模观测器的动态方程:
(11)
根据滑模变结构控制理论,当系统在滑模面上滑动时,则:
(12)
将式(12)代入式(11),得:
(13)
估算出反电动势后,转子近似位置估算角:
(14)
(15)

(16)
由式(13)和式(14)可知,当电机低速运行时,反电势幅值较小,若取0 >l2> -1,则Fe的幅值可比反电势的幅值大得多,因此相对于传统SMO算法,估算转子位置的精度大大提高了。图1给出了基于新型滑模观测器的位置自检测控制算法的控制框图。
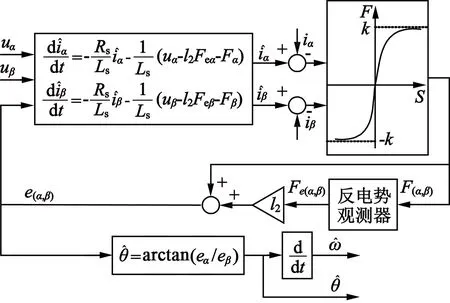
图1 新型滑模观测器算法结构框图
2 脉振高频注入法
根据文献[13],高频余弦电压信号和高频电流:
(17)
(18)
从式(18)可以看出,如果d轴和q轴上的高频阻抗不等,则在估计的转子旋转坐标系中,d轴和q轴高频电流分量的幅值都与转子位置估算误差角有关。当位置估算误差角等于零时,式(18)中高频电流q轴分量等于零,在这种情况下,对高频电流q轴分量进行适当的信号处理,经过位置跟踪观测器,可提取转子的位置和速度信息。
相对于高频电感,高频电阻来很小,可忽略,因此dq轴高频阻抗以及式(18)中q轴上的高频电流可以简写成:
(19)
(20)
式中:Ldh,Lqh为d轴和q轴的高频电感,且Rdiff=(Rdh-Rqh)/2,Ldiff=(Ldh-Lqh)/2。
为了提取式(20)中的转子位置估算误差角,可先用带通滤波器(BPF)获取q轴上的高频电流分量,然后利用sinωht信号进行解调以提取与半差高频电感有关的高频电流分量,再经低通滤波器(LPF)后获取转子位置观测器的输入信号,提取过程:
(21)
(22)

(23)

永磁同步电动机的机械运动状态方程:
(24)
(25)
式中:Te为电磁转矩;TL为机械转矩;J为转动惯量。
基于龙伯格状态观测器转子位置估算的状态方程:
(26)
(27)

从式(26)和式(27)可以看出,通过调节增益Kd和Kp来调节观测器的动态性能。为了改善龙伯格观测器的抗扰动和稳态性能,通常情况下会增加积分增益Ki。再结合上述计算转子位置估计器输入信号的过程,则基于龙伯格状态观测器的脉振高频电压信号注入法的原理框图如图2所示。
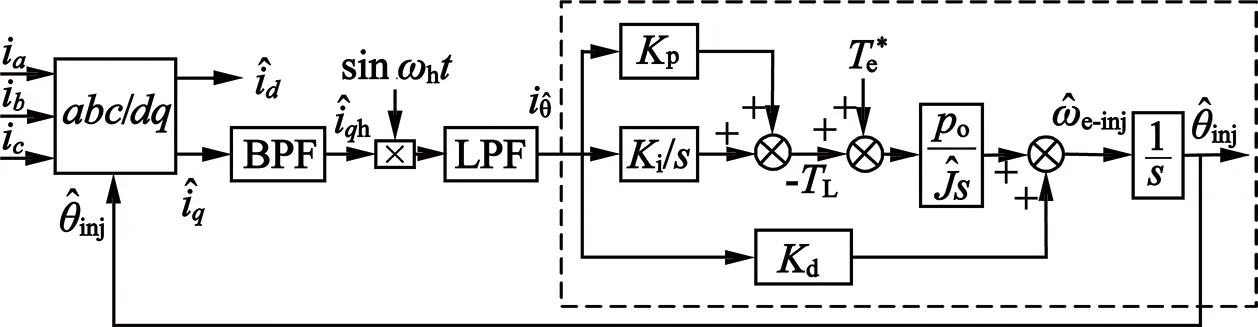
图2 基于龙伯格观测器的脉振高频电压
3 新型位置自检测复合控制技术
通过对比新型滑模观测器和脉振高频电压信号注入法的优缺点可以发现,新型滑模观测器具有很好的动静态性能和鲁棒性,但对电机参数变化敏感,在零低速运行时会因反电势过小而无法准确地检测到转子位置。但是,脉振高频电压信号注入法对电机参数的变化不敏感,但因多个滤波器的使用会导致转子的估算位置和速度存在滞后现象,而且信号处理过程较复杂,高速时不能及时跟踪系统的动态过程,多用于电机低速运行。为了实现永磁同步电动机全速度范围内的转子位置自检测,可以将新型滑模观测器和脉振高频电压信号注入法相结合构成一种新型位置自检测复合控制,如图3所示。在电机起动和运行低速时,采用脉振高频电压信号注入法来估算转子位置和速度,中高速时则采用新型滑模观测器来保证系统的动态性能和鲁棒性,并利用
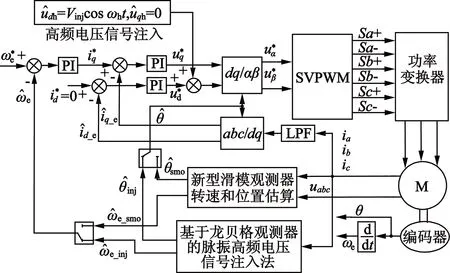
图3 新型转子位置自检测复合控制系统结构图
滞环切换方式来实现两种无位置传感器控制算法之间的切换。
4 仿真研究
为验证电动汽车用永磁同步电动机位置自检测控制系统的有效性与优势,利用MATLAB/Simulink在带额定负载情况下进行了仿真研究。
仿真中电机的主要参数如下:额定转速为400 r/min,定子相绕组电阻为2.18 Ω,定子相绕组电感为20 mH,永磁磁链为0.1 Wb,转子极对数为23,额定电磁转矩为8 N·m,驱动控制系统的转动惯量为0.021 658 kg·m2,摩擦系数为0.025 N·m·s/rad。
新型滑模观测器算法在电机低速运行时位置估算存在问题,而脉振高频电压信号注入法能在电机低速甚至零速时准确地检测转子的位置和速度,为此,本文选择了30 r/min进行仿真研究。图4为基于脉振高频电压注入法的位置自检测控制下的仿真波形,由图中的转速误差波形可知,电机在30 r/min运行下估算转速和实际转速始终保持一致,具有很好的静态跟踪性能。另外,由位置波形可知,基于脉振高频电压信号注入法的位置自检测算法能够准确跟踪转子的实际位置,获得良好的跟踪精度。
为验证该新型转子位置自检测复合方法的可行性和有效性,本文对图3所示的模型进行了变速运行的仿真研究。其中,切换转速设定为50 r/min,参考转速在0.2 s时由30 r/min突升为200 r/min,然后在0.4 s时参考转速又突降为30 r/min,仿真结果波形如图5所示。从转速误差波形可知,电机在升
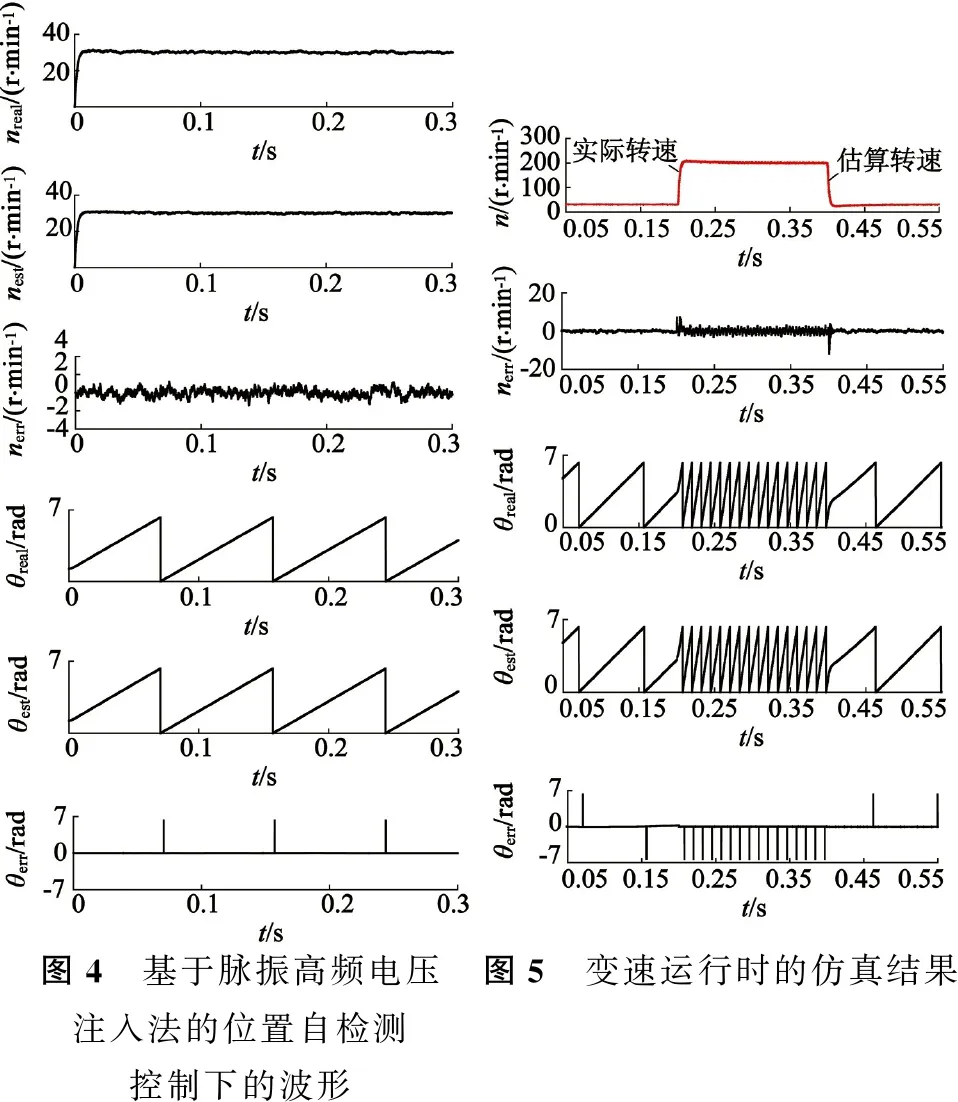
图4 基于脉振高频电压注入法的位置自检测控制下的波形图5 变速运行时的仿真结果
降速中经过转速切换区时,电机转速会有微弱的抖动,但并不影响驱动系统整体的切换,只是在变速区估算转速和实际转速之间的误差略有增大,但在稳态运行时转速基本保持一致,动态响应较好。另外,从位置误差波形可以看出,电机在升速中经过转速切换区时,位置误差有了明显的增大,但稳态时估算位置基本和实际位置重合,跟踪效果很好。由上述仿真结果可知,当该电机在位置自检测控制下运行时,新型位置自检测复合控制技术能够在脉振高频电压信号注入法和新型滑模观测器之间有效的切换,验证了该方法的可行性和准确性。
5 实验研究
为进一步验证电动汽车用永磁同步电动机位置自检测控制系统的良好性能,搭建实验平台,选用DSP TMS320F2812为控制核心,实验样机参数与仿真中的相同。实验结果如图6~图9所示。
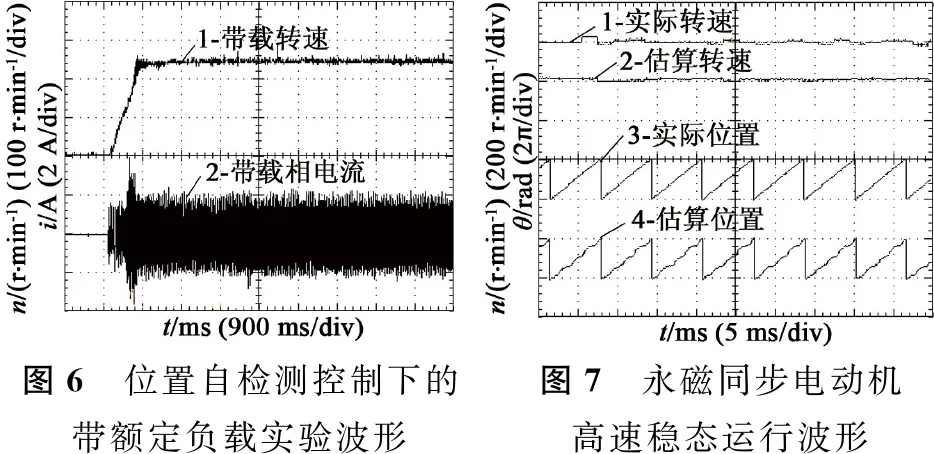
图6 位置自检测控制下的带额定负载实验波形图7 永磁同步电动机高速稳态运行波形
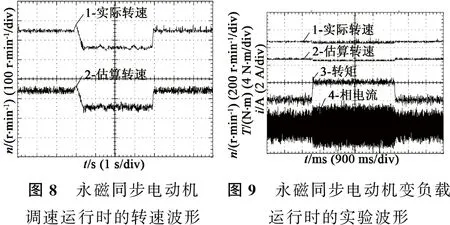
图8 永磁同步电动机调速运行时的转速波形图9 永磁同步电动机变负载运行时的实验波形
图6为位置自检测控制下的带额定负载实验波形,由图可知,通过脉振高频电压信号注入法能够很好地完成电机启动,并且启动阶段其转速并没有发生大的抖动。当电机稳定运行于中速区时,切换到基于新型滑模观测器的位置自检测控制,此时电机转速抖动小,说明转子位置信号精确,整个控制过程满足了电动汽车对驱动控制器的要求。
在基于新型滑模观测器算法的控制下,对该电机进行了稳态实验。图7给出了电机在额定转速稳态运行时的实验结果。由图可知,电机在高速稳态运行时,估算转速和估算位置的效果好,估算转速的稳态误差最大约为2.5%。
图8为电机从250 r/min降到150 r/min再升回250 r/min变速运行时,转子实际转速和估算转速的实验波形。由图可知,估算转速虽然不是很平滑,但是运行趋势基本与实际转速保持一致。实验证明位置自检测控制系统能够变速运行,具有良好的动态响应特性。
为了进一步验证该电机控制系统的抗负载扰动性能,对该电机加载以及减载的实验,实验结果如图9所示。从图中可以看出,该电机在突加负载后运行的转子估算转速稍有下降,但是变载过程估算转速和实际转速没有发生很大变化。实验结果验证了位置自检测算法对负载扰动具有较强的鲁棒性。
6 结 语
本文针对电动汽车用永磁同步电动机,在分析其位置自检测控制技术原理的基础上,建立了基于新型转子位置自检测复合方法的永磁同步电动机驱动控制系统。所提出的控制算法不仅具有良好的鲁棒性,而且能够在全速包括零速范围内具有很好的位置跟踪效果。最后通过仿真和实验,验证了该永磁同步电动机位置自检测控制系统的良好性能,满足电动汽车对驱动系统的要求。
[1] 陈文敏,刘征艮,刘摇海.电动汽车用调速永磁同步电动机分析与设计[J].微特电机,2014,42(11):21-24.
[2] 邱腾飞,温旭辉,赵峰,等.永磁同步电机永磁磁链自适应观测器设计方法[J].电机工程学报,2015,35(9):2287-2294.
[3] FAN Ying,ZHANG Li,HUANG Jin,et al.Design,analysis,and sensorless control of a self-decelerating permanent-magnet in-wheel motor[J].IEEE Transactions on Industrial Electronics,2014,61(10):5788-5797.
[4] FAN Ying,ZHANG Li,CHENG Ming,et al.Sensorless SVPWM-FADTC of a new flux-modulated permanent-magnet wheel motor based on a wide-speed sliding mode observer[J].IEEE Transactions on Industrial Electronics,2015,62(5):3143-3151.
[5] PREINDL M,SCHALTZ E.Sensorless model predictive direct current control using novel second-order PLL observer for PMSM drive systems[J].IEEE Transactions on Industrial Electronics,2011,58(9):4087-4095.
[6] IDKHAJINE L,MONMASSON E,MAALOUF A.Fully FPGA-based sensorless control for synchronous AC drive using an extended kalman filter[J].IEEE Transactions on Industrial Electronics,2012,59(10):3908-3918.
[7] SHI Y C,SUN K,HUANG L P,et al.Online identification of permanent magnet flux based on extended Kalman filter for IPMSM drive with position sensorless control[J].IEEE Transactions on Industrial Electronics,2012,59(11):4169-4178.
[8] AL-NABI E,WU B,ZARGARI N R,et al. Sensorless control of CSC-fed IPM machine for zero- and low-speed operations using pulsating HFI method[J].IEEE Transactions on Industrial Electronics,2013,60(5):1711-1723.
[9]VOGELSBERGERMA,GRUBICS,HABETLERTG,etal.UsingPWM-inducedtransientexcitationandadvancedsignalprocessingforzero-speedsensorlesscontrolofacmachines[J].IEEETransactionsonIndustrialElectronics,2010,57(1):365-374.
[10]LINTC,GONGLM,LIUJM,etal.Investigationofsaliencyinaswitched-fluxpermanent-magnetmachineusinghigh-frequencysignalinjection[J].IEEETransactionsonIndustrialElectronics,2014,61(9):5094-5104.
[11] 樊英,张丽,程明.基于宽速滑模观测器的新型自减速永磁轮毂电机无传感器直接转矩控制[J].电工技术学报,2014,29(5):141-148.
[12] 秦峰,贺益康,刘毅,等.两种高频信号注入法的无传感器运行研究[J].中国电机工程学报,2005,25(5):116-121.
[13]JANGJH,SULSK,HAJI,etal.Sensorlessdriveofsurface-mountedpermanent-magnetmotorbyhigh-frequencysignalinjectionbasedonmagneticsaliency[J].IEEETransactionsonIndustryApplications,2003,39(4):1031-1039.
[14] 刘艳,齐晓燕.感应电机龙伯格—滑模观测器参数辨识方法[J].电机与控制学报,2011,15(8):93-100.
Research on Rotor Position Self-Sensing Control System of a PMSM for Electric Vehicles
ZHOUXiang-zhen1,ZHANGShun2
(1.Nanjing University of Science and Technology,Taizhou 225300,China;2.Maintenance Branch of Jiangsu Power Company,Nanjing 210000,China)
There are many problems exist in the traditional rotor position self-sensing control. To overcome these problems, a hybrid approach of rotor position self-sensing control based on a PMSM for electric vehicles is investigated in this paper. The proposed method has good robustness and position tracking performance at full speed including zero speed. Based on the proposed algorithm, a PMSM position self-sensing control system is set up. Simulation and experiment are implemented on the platform. The results verify the feasibility and effectiveness of the proposed method.
electric vehicle; PMSM; vector control; position self-sensing control
2015-11-18
TM341;TM351
A
1004-7018(2016)12-0048-05
猜你喜欢
上海大中型电机(2021年2期)2021-07-21
防爆电机(2020年6期)2020-12-14
防爆电机(2020年4期)2020-12-14
北京航空航天大学学报(2020年10期)2020-11-14
中国惯性技术学报(2019年6期)2019-03-04
北京航空航天大学学报(2017年6期)2017-11-23
北京航空航天大学学报(2017年4期)2017-11-23
北京航空航天大学学报(2016年7期)2016-11-16
北京航空航天大学学报(2016年4期)2016-02-27
铁道科学与工程学报(2015年5期)2015-12-24