
机器人示教臂系统的示教实现
2016-01-19 01:40:32,
机械与电子 2015年10期
关键词:工业机器人
,
(哈尔滨工业大学机器人系统与国家重点实验室,黑龙江 哈尔滨 150000)
Realization of Teaching Method by Robot Teaching Arm
KONG Minxiu,ZHAO Ning
(State Key Laboratory of Robotics and System, Harbin Institute of Technology, Harbin 150001, China)
机器人示教臂系统的示教实现
孔民秀,赵宁
(哈尔滨工业大学机器人系统与国家重点实验室,黑龙江 哈尔滨 150000)
Realization of Teaching Method by Robot Teaching Arm
KONG Minxiu,ZHAO Ning
(State Key Laboratory of Robotics and System, Harbin Institute of Technology, Harbin 150001, China)
摘要:提出了基于轻质无驱动机械臂人工拖动的直接示教方式。根据DH变换法建立了示教臂与被示教机器人运动学关系。针对逆运动学多解问题,以位形选择方式,实现示教臂和机器人的位置映射,从而实现了示教臂与机器人的示教-再现过程,并说明了有奇异路径的示教方法。对具体任务进行仿真验证了方法的有效性。
关键词:工业机器人;示教臂;拖拽驱动示教
中图分类号:TP242.2
文献标识码:A
文章编号:1001-2257(2015)10-0076-05
收稿日期:2015-06-03
Abstract:A teaching method with light mass mechanical arm based on no motor-driving and on man-hand-dragging is proposed. Relationship of the kinematics between the two arms is set up based on D-H method. To choose one appropriate solution from multiple solutions of inverse kinematics by choosing configuration number to correspond trajectory is proposed, realizing the industrial robot to play the trail. The teach method of singular path is also stated. Simulation for specific tasks is done and the method is shown to be effective.
作者简介:孔民秀(1972-),男,黑龙江阿城人,副教授,研究方向为机器人技术;赵宁(1990-),女,河北石家庄人,硕士研究生,研究方向为工业机器人。

Key words:industrial robot; teach arm; drag-teach method
0引言
随着工业机器人广泛应用于喷涂、焊接、抛光打磨等复杂轨迹的作业[1-]3],所带来的问题是示教任务变得越来越繁重,轨迹规划需要耗费大量的时间、资源。参考文献[4-]5]分别描述了以机器人示教机构、数字笔和牵引机器人方式的示教过程,以及所带来的对象受限、不能全面反映位形信息、操作劳动强度大以及安全性等问题。针对示教中出现的问题,提出手动拖动示教臂末端的方式示教。该方法不需要进行轨迹规划,直接利用技术工人的喷涂经验,拖动示教臂的末端到达期望的位姿工作任务的各个位置和姿态,得到示教轨迹,同时记录位形信息。
分析了示教的原理和方法,提出示教-再现轨迹对应、位形对应的方法,以及如何处理奇异位姿轨迹。仿真实验说明了如何选择位形来保证轨迹的连续性,实现了示教臂与机器人示教-再现的过程。
1示教臂示教的实现原理和方法
与工业机器人结构类似,该示教臂具有6个自由度,但杆件长度尺寸不同以匹配人的身高及操作范围。示教臂由人拖曳末端到达预期轨迹,除了关节处的编码器需要电池外,无需其他动力源。结合关节变量和尺寸参数,利用正运动学得到示教轨迹(位姿),已知示教轨迹,经过坐标变换,利用逆运动学得到关节变量,再将其下发给机器人,控制示教-再现位形的对应来实现轨迹的处理,使机器人再现示教轨迹。示教臂示教的实现流程如图1所示。
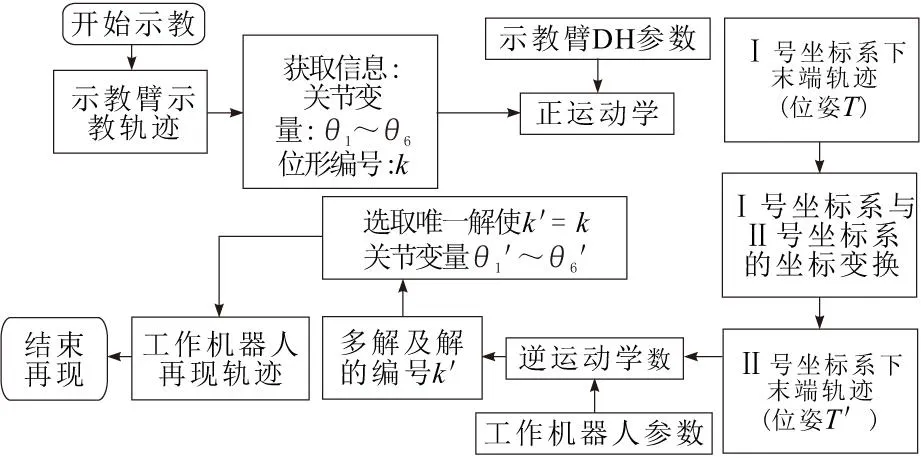
图1 示教-再现流程
示教臂的操作过程无需与机器人实现同步运动,不局限于机器人的结构长度,因此与机器人的工作也互不干涉,可以实现一台机器人对多同构型台机器人进行示教。
2示教-再现轨迹对应处理及优化
示教-再现轨迹的对应处理包括末端轨迹对应和机构位形对应2部分。
2.1 末端轨迹对应
在示教-再现过程中,示教臂和机器人的基坐标系分别为I、II号坐标系,世界坐标系、示教臂和机器人的末端坐标系、工件坐标系分别用W Ed C表示,如图2a所示。首先,需要建立示教臂的正运动学模型来获取末端轨迹ⅠTEdI。按照图2在I系下建立示教臂坐标系如图2b所示,得到DH参数,并根据式(1)得到各连杆之间的变换矩阵Ai。再由式(2)得到示教轨迹的位姿矩阵ⅠTEdI。
Ai= Rot(Z,θi)·Trans(0,0,di)·
Trans(ai,0,0)·Rot(xi,αi)
(1)
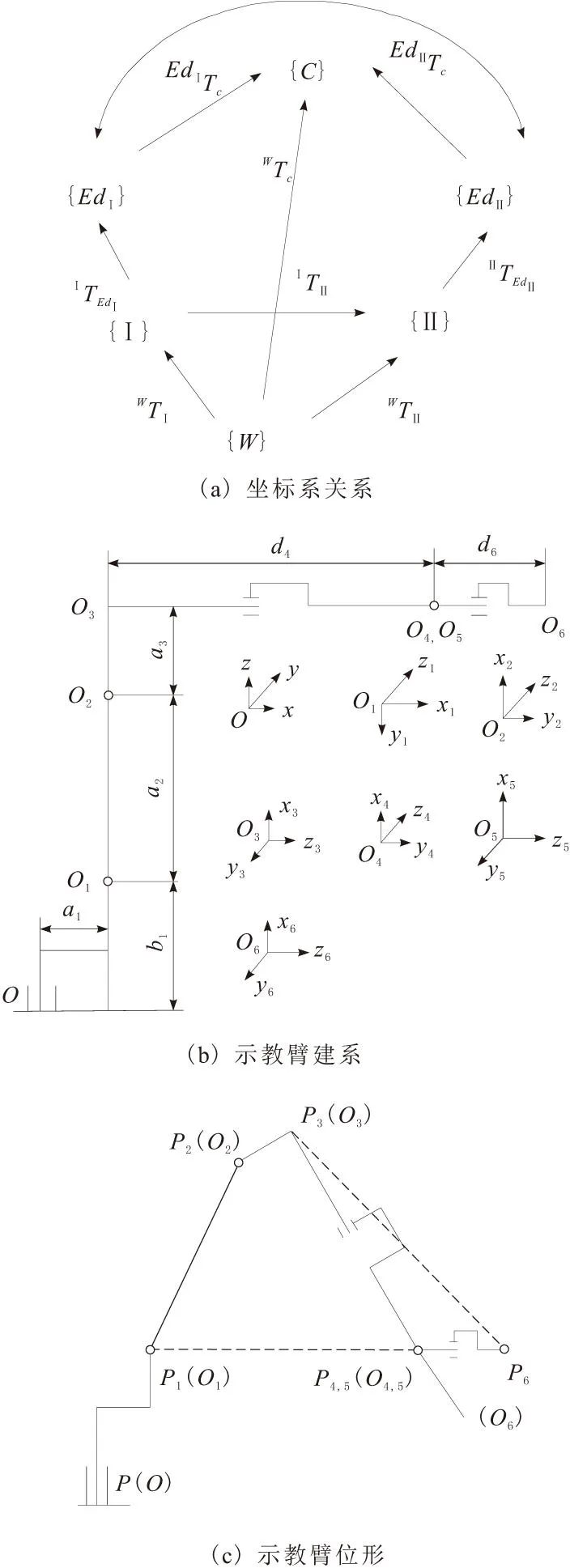
图2 示教臂坐标系及位形
θi为示教过程中采集的关节角度(包括初始角),i=1,2,3,4,5,6。
(2)
示教臂和机器人末端轨迹对应是指:两机构末端相对工件坐标系的位姿相同,如式(3)。根据图2中的坐标关系得式(4),进而推导出示教臂末端轨迹与机器人末端轨迹的关系,如式(5),即由Ⅰ系下示教轨迹ⅠTEdI、Ⅱ系Ⅰ系相对位姿ⅠTⅡ,可转换为Ⅱ系下的示教轨迹。
(3)
(4)
(5)
ⅠTⅡ为Ⅱ系相对Ⅰ系的位姿矩阵。
2.2 位形的对应
2.2.1位形的定义与示教臂位形的判断
位形是指示教臂或机器人在运动过程中,大臂、小臂、手腕之间不同的位置关系。如图2c所示,示教臂向0号系(∑Oxyz)中Oxy平面的投影,O1、O4(第2、5关节)在原点O的同侧时,为前臂;在异侧,为后臂;向1号系的O1x1y1平面的投影,O2(第3关节)在O1,O5左侧(从O1向O5看去)时,为髙臂;在右侧,为低臂;向3号系的O3x3y3投影,O4在O3,O6(第4关节、末端)右侧(从O3向O6看去)时,为上翻腕;在左侧,为下翻腕。
对应示教臂位形的判断引入3个标志位k1,k2,k3,标志位取0或1时,代表大臂、小臂、手腕不同位形。具体对应关系表如表1,那么按式(6)则可以得到编号k=1~8,共对应8种位形。k=k1·22+k2·21+k3·20+1
(6)
利用示教臂记录的关节变量θ1~θ6正运动学,分析位形及对应的编号,参考图2c所示。
表1位形组合与编号的对应关系

O3的值标志位k1标志位k2标志位k30前臂髙臂上翻腕1后臂低臂下翻腕
判断O1,O4 是否在O同侧,只需判断O1,O4是否在同一象限即可。若在同一象限,则大臂位形为前臂,标志位k1=0;若不在,则为后臂,标志位k1=1。判断O2是否在O1,O4的左侧,只需判断O2在O1O4直线方程的上侧、下侧即可。当O5在1、4象限时,O2在直线的上侧为髙臂,当O5在2、3象限时,O2在直线的下侧为髙臂,标志位k2=0;反之,为低臂,标志位k2=1。
判断O4是否在O3,O6右侧,方法与判断高、低臂一致,所不同的是,点在直线右侧时为上翻腕,标志位为k3=0,流程也进行相应的调整。
最后,由标志位k1,k2,k3的值与式(6)计算示教对应位形的编号k。
2.2.2机器人位形的判断
判断机器人的位形,首先需要建立逆运动学模型,利用Ⅱ系的末端位姿ⅡTEdⅡ求解机器人对应的关节变量θ1~θ6。机器人坐标系和DH参数的建立,参考示教臂,不再赘述。对于末端轨迹,位形不同是导致逆运动学多解的根本原因。按照上面位形的定义,机器人逆解在1、2、5关节各有2组解。

图3 工作机器人在各坐标系的投影
(7)
(8)
(9)
(10)
θ6=arctan2(-b32/sin(θ5),b31/sin(θ5))
(11)
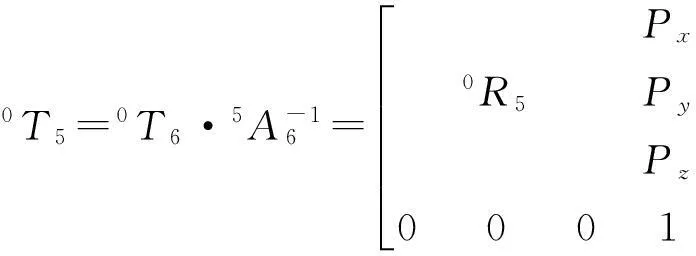
由θ2可利用式(1)得到A2,将手部位姿投影到的2T5,如式(11),将5号系O5x5y5z5投影到1号系的O2x2y2平面,如图4e所示,由坐标(px2,py2求第3关节角θ3)见式(13)。
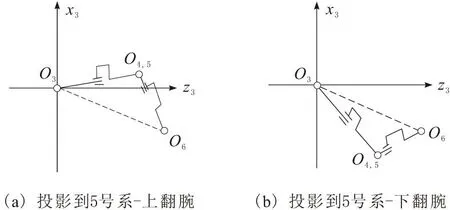
图4 工作机器人在5号系下的投影
(12)
θ3=arctan2(Py2,Px2)-arctan2(d4,a3)
(13)

(14)
(15)
θ4=arctan2(-b23/sin(θ5),-b13/sin(θ5))
(16)
θ6=arctan2(-b32/sin(θ5),-b31/sin(θ5))
(17)解析方法求得的θ5,对应位形上、下翻腕的几何意义,如图4a为上翻腕,图4b为下翻腕。至此,θ2~θ6已经求解完毕,θ1,θ2和θ5分别有2组解,其他关节解惟一,因此θ1~θ6共2×2×2=8组解,并且利用标志位k1,k2,k3和式(6)可惟一确定位形的编号1~8。
一般情况下,筛选出机器人逆解编号k′与示教臂正解编号k相等的解,则是需要下发给机器人关节信息,如图1所示,则可使机器人再现轨迹时与示教臂示教时的位形保持一致,从而避免解的筛选不当造成的位形突变和机器人关节的速度突变。
2.3 轨迹中有奇异位置的的示教
运用示教臂对机器人进行示教,需要考虑人示教的轨迹应是机器人可以达到的轨迹。
由于示教臂与机器人的结构参数大小的差异,两个的工作空间不是完全重合,因此人在示教过程中,需要注意运动轨迹应在两个共同工作空间内部,从而避免机器人逆解时出现无解或边界奇异的状态。
示教臂规定工作空间内部运动过程中,当第5关节轴线与1关节轴线相交(图3a中O4投影在y中上),则无法区分前臂、后臂;当大臂轴线与小臂轴线重合(图3c中O2投影在O1O5直线上),则无法区分髙臂、低臂;当第4、第6关节轴线重合(图4a中O5投影在O3O6直线上),则无法区分上翻腕、下翻腕。当出现位形无法区分时,示教臂的某些关节会出现退化现在,而失去自由度,此种情况的内部奇异,由人手驱动示教臂末端避开奇异点即可;而机器人出现上述位形无法区分的奇异,除了在算法上实现逆解处理的方法外,还可找出机器人奇异点对应的示教臂位形,人拖动示教臂,以避开该位形的方式再次示教。这种通过人来选择轨迹的方法,大大减小了轨迹规划的工作。
3仿真验证
以实验室自制示教臂和机器人为例,说明示教-再现轨迹对应的方法。示教臂示教的轨迹分别为S形折线和一段圆弧,如图5a和图5b所示,对于以示教臂2号位形示教轨迹1,求解机器人再现轨迹可以满足的位形信息,如图5c所示,在整条轨迹中,出现有2,4,6,8号位形满足末端某些轨迹位姿,但只有2号位形在所有的轨迹点都存在解,因此选择连续的轨迹2号位形使机器人再现。

图5 示教任务和分析
对于以示教臂5号位形(k=5)示教轨迹2,如图6a所示。求解机器人再现轨迹有5,8号位形均可满足连续轨迹,仿真图6b为以5号位形再现轨迹2,图6c为以8号位形再现轨迹2,并且机器人运动均平滑,那么在此种情况下机器人运动位形k′=5或k′=8均可达到要求。
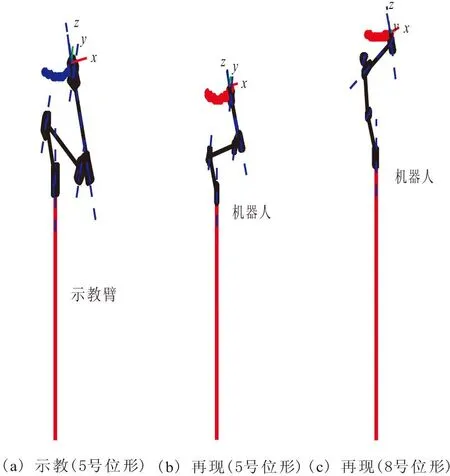
图6 示教臂及机器人运动仿真
4结束语
提出一种可以人手拖动示教的方法,以示教臂代替示教盒,实现直观、简单、快速、低成本一对多示教,实现了示教臂示教与机器人再现轨迹的位形分析法和含有奇异位姿轨迹的示教方法,利用示教臂示教大大减少轨迹规划的工作。通过仿真实验,证明示教可以记录位形和末端轨迹信息,说明了轨迹对应时的位形选择过程,表明了该示教方法的可实行性。
参考文献:
李占贤,陈杰,杨志杰,等.关节型机器人示教机构的平衡设计与优化.机械工程师,2010(9),30-32.
LinHI,LinYH.Anovelteachingsystemforindustrialrobots.Sensors(Switzerland),2014,14(4):6012-6031.
ChoiS,EakinsW,RossanoG,etal.Lead-throughrobotteaching//TechnologiesforPracticalRobotApplications(TePRA),2013IEEEInternationalConferenceon.IEEE, 2013:1-4.
谭民.先进机器人控制.北京:高等教育出版社,2007.
付京逊,冈萨雷斯RC,李CSG.机器人学[控制 传感技术 视觉 智能].杨静宇,李德昌,等译.北京:中国科学技术出版社,1989.

猜你喜欢
中国科技纵横(2016年20期)2016-12-28 17:55:52
科技创新与应用(2016年34期)2016-12-23 18:52:28
青春岁月(2016年22期)2016-12-23 16:07:08
汽车科技(2016年6期)2016-12-19 20:40:37
科技创新导报(2016年21期)2016-12-17 12:23:00
科技视界(2016年25期)2016-11-25 00:16:40
中小企业管理与科技·下旬刊(2016年10期)2016-11-18 20:57:34
科技视界(2016年18期)2016-11-03 23:15:51
企业导报(2016年13期)2016-07-19 18:30:45
科技视界(2016年15期)2016-06-30 18:35:47
