
科式质量流量计新型模拟驱动电路研究
2016-01-17 17:36黄丹平汪俊其于少东
自动化与仪表 2016年1期
黄丹平 ,汪俊其 ,于少东 ,2,王 磊
(1.四川理工学院 机械工程学院,自贡 643000;2.人工智能四川省重点实验室,自贡 643000;3.过程装备与控制工程四川省高校重点实验室,自贡 643000)
科式质量流量计是由振动管、传感器、电磁激振器、信号处理系统和驱动系统组成[1]。驱动系统作为科式质量流量计重要的组成部分之一,由传感器、电磁激振器和驱动电路组成[2]。驱动电路系统从安装在振动管上的传感器输出端采集信号后,该信号经过滤波放大处理再送到电磁激振线圈上,保持振动管以其固有频率持续振动[3]。因此,若驱动电路系统工作不稳定或起振受到其它干扰信号的影响,其科式质量流量计将不能正常工作。本文结合国内外最新芯片技术,对驱动电路的工作原理进行分析研究,对驱动电路进行了创新设计,采用集成芯片技术代替传统采用离散元器件组成的电路,并对研发驱动电路进行了仿真分析及实物试验。该研发电路结构更简单、趋于集成化、模块化,输出信噪比大,电路体积更小,方便用户安装。不仅能达到振动管快速平稳起振,而且能做到对其固有频率的实时跟踪。该驱动电路可以灵活运用于成分比较复杂的流体,如批料流等应用[4]。
1 驱动激振系统的原理
驱动电路、振动管、电磁激振器和振动管两端的传感器构成一个自激系统[5],振动管两端的传感器获取振动信号,该信号被输入到驱动电路中,经过滤波放大后再传递给电磁激振器为振动管提供驱动力,从而驱动振动管振动,形成一个闭环回路,并使振动管稳定持续振动,即建立起自激振动。
自激振动平衡的条件为

式(1)为幅值平衡条件。系统若要进行自行振荡,则必须满足

假如不加入外部能量供应系统,自激系统由于受到阻尼的作用,电磁激振器上的能量逐渐减小,致使不能满足振动管持续振动所需的能量。因此需要一个能产生持续驱动力的驱动电路来保持振动管持续平稳的振动,本文就驱动电路深入研究后,对其原有驱动电路进行创新改进。
2 模拟驱动电路的组成
科式质量流量计原有模拟驱动电路主要由电压跟随器、滤波电路、自动增益电路和功率放大电路组成[7],如图1所示。该电路在上电时由于信号比较微弱需要信号放大器对信号进行初级放大,由于该仪表工作现场包含许多高频干扰信号,因此信号初级放大后,应被输入到低通滤波器,以此从该信号中滤掉各种高频噪声信号。滤波后得到的信号输入到自动增益控制电路系统,自动增益控制电路能自动稳定信号电压幅值。经功率放大电路将稳幅信号进行能量放大后作为起振信号送入电磁激振线圈,驱动振动管起振,从而达到快速平稳的起振效果[8]。

图1 模拟驱动框图Fig.1 Simulation drive block diagram
3 新型驱动电路改进方案
经研究发现使用传统离散元器件组成的电路存在众多问题,由于离散元器件过多,电路处于工作状态时,离散元器件之间产生干扰信号,引起停振现象;其次,科式质量流量计存在振动性因素,离散元器件过多,可能由于振动造成个别单晶体管损坏,造成振动管不能起振,需要对众多的离散元器件进行逐一排查,为维修带来很大的困难;最后,离散元器件过多,加大了驱动电路的体积,在有些狭小的空间就限制了科式质量流量计的使用,并且安装不方便。
针对上述问题本文研发了一种主要由电压跟随器、二阶低通滤波器、自动控制集成芯片、电压放大器和集成功率放大器等集成芯片构成的驱动电路,大大减少了离散元器件的使用,从而使电路在硬件设计上,有效地避免了由于离散元器件过多带来的干扰,方便维护,大大提高了起振速度和工作的平稳性,减小了科式流量计驱动电路体积。
4 新型驱动电路实现方法
驱动电路原理图如图2所示,是由OPA820、AD8367、TL084和TDA8943SF等集成芯片组成。检测信号是通过一次仪表上传感器得到的,信号经电压跟随器传输到驱动电路,经过二级有源滤波器,滤除高频信号后,再送入AD8367自动增益控制芯片进行稳幅,从而有效地控制信号幅值,再经过电压放大器和TDA8943SF功率集成放大器进行能量放大,最后送给一次仪表中的电磁激振器,从而驱动振动管的振动。
4.1 低通滤波器
由于科式质量流量计驱动电路对信号频率精度要求非常高,于是本电路就通过 R1、R2、R3、C2、C3、Rf和OPA820组成了一个二阶低通滤波器。二阶滤波器相对与一阶滤波器而言,通带衰减更快,而且隔高频性能更好,对于科式质量流量计这种利用低频信号起振的设备,起到了良好的滤除高频信号作用。 通过 C2、C3、R2、Rf可以设置滤波器的截止频率,滤除系统不需要的高频信号,截止频率公式可以表示为


图2 科里奥利质量流量计新型驱动电路Fig.2 Coriolis mass flow meter new driver circuit diagram
本文所设计的二阶低通滤波电路如图3所示。
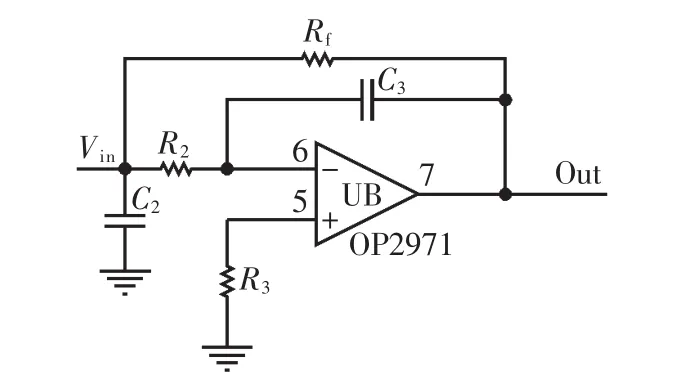
图3 二阶低通滤波电路Fig.3 Second-order low-pass filter circuit diagram
传统驱动电路都采用一阶滤波器,虽然结构简单,但是滤波特性不如二阶滤波器滤波效果好。而科式质量流量计需要起振频率精度高,因此,对滤波器的截止频率要求是非常高的。如使用一阶滤波器来处理采集信号,其滤波效果不理想的话,直接影响振动管的起振速度。本文分别对传统驱动电路用到的一阶滤波电路和本研发电路所用到的二阶滤波电路进行了滤波效果仿真分析,并得到信号输出仿真效果图,如图4所示。
图 4(a)为传感器输出原始信号,4(b)为一阶滤波器信号输出波形,4(c)为经本研发电路所用到的二阶滤波器信号输出波形。经过测试结果本研发科式质量流量计驱动电路采用二阶滤波器也存在少量的高频信号,与传统离散元器件组成一阶滤波器滤波后的信号还存在大量高频杂波信号相比,具有良好的滤波效果。可见本研发科式质量流量计采用二阶滤波器对电路滤波起到了更好的效果,更有利于振动管快速平稳起振。
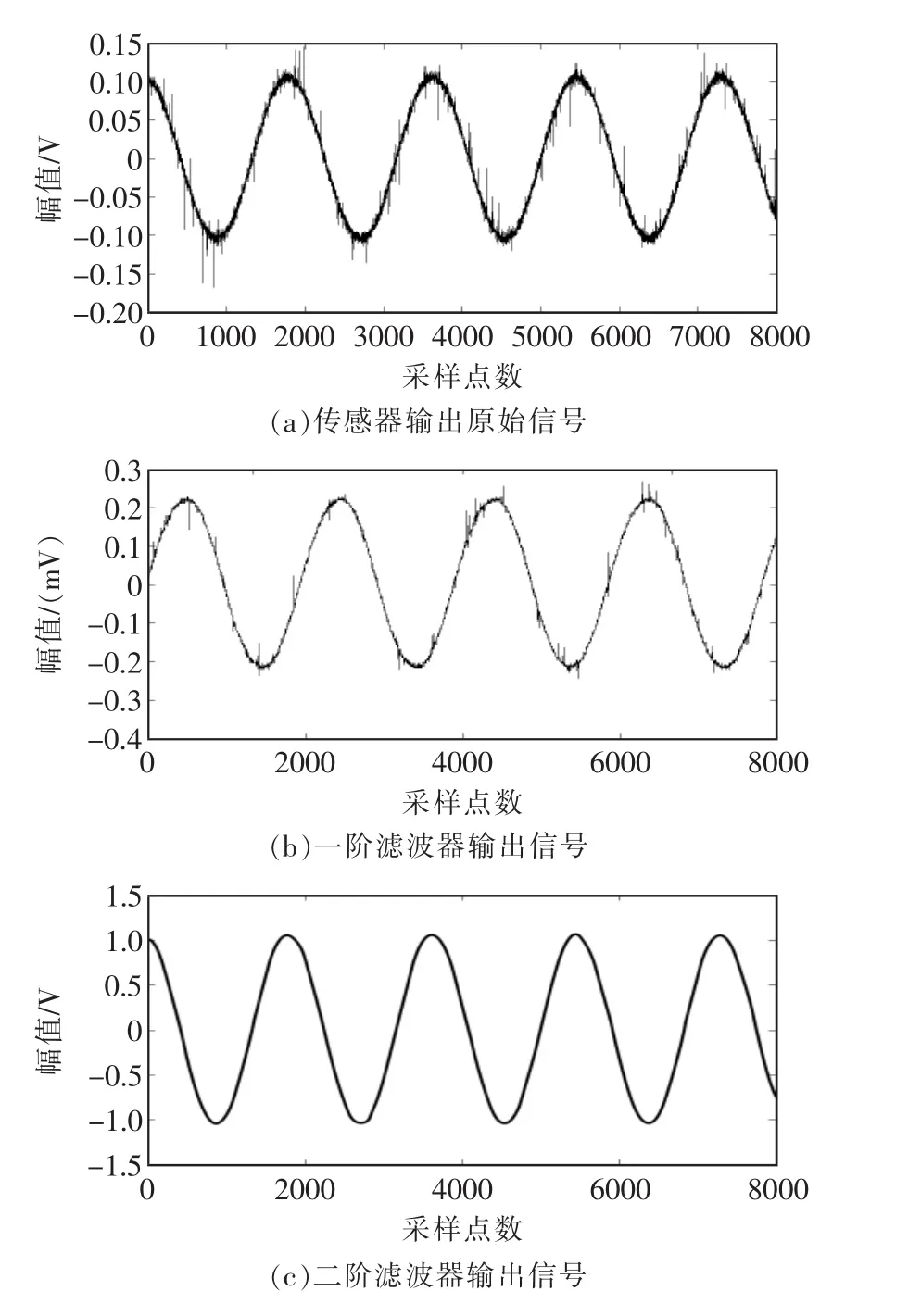
图4 原始信号与经一、二阶滤波器得到滤波信号比较Fig.4 Original signal and the first&second order filter for filtering signal comparison chart
4.2 自动控制增益芯片
科式质量流量计驱动电路主要起稳幅作用,稳定幅值能更好地使振动管快速平稳起振,因此本研发科式质量流量计驱动电路采用一款自动增益控制芯片AD8367,该芯片内部不仅集成了可实现单片AGC功能的方根检波器,还具有可控制线性增益的高性能可变增益放大器,使其可以在100 MHz下的任何频率稳定工作[9]。利用芯片内部集成检波器配置成单片自动增益放大器,当芯片有输入信号时,检波器将从DETO端输出与输入信号成比例的接受信号强度电压。该接受信号强度电压作为该自动增益控制芯片的控制电压加到增益控制端GAIN,有效使输出信号保持在一定幅值范围内,起到良好的稳幅作用。当MODE接地时增益会随着电压的增强而减弱、电压的减弱而增强,其计算公式为

科式质量流量计驱动电路的作用是对信号实时保持稳定幅值,该芯片符合科式质量流量计在启动时弱信号变强和遇外界干扰时强信号变弱的特点。在模拟驱动中,一次仪科式质量流量计振动管相当于一个低通滤波器,可实现固有频率的实时自动满足,因此,科式质量流量计驱动电路只需对输出信号起到良好的稳幅作用。本研发科式质量流量计驱动电路采用集成芯片AD8367,该芯片避免离散元器件之间繁杂耦合配合来满足自动增益要求,只需添加一些简单的外围元器件,如图5所示,就能很好起到稳幅作用,从而也消除由于元器件过多,造成器件之间产生干扰现象。电容C5可有效地控制信号的输出频率,根据自己的要求匹配合适的电容截止计算公式为


图5 自动增益芯片电路Fig.5 Automatic gain chip circuit
在图2电路中,需对输入输出端口进行阻抗匹配,该电路对芯片输入端口加以射极跟随器进行阻抗匹配,并对其进行稳幅测试。稳幅测试:输入频率为65 Hz、幅值为100 mV~500 mV的正弦信号,C5电容设置为146 nF,用示波器对结果进行测试,读取输出信号峰-峰值,改变信号发生器输出信号幅值,测量输出信号峰-峰值变化,计算误差测试数据,幅值测试结果如表1所示。
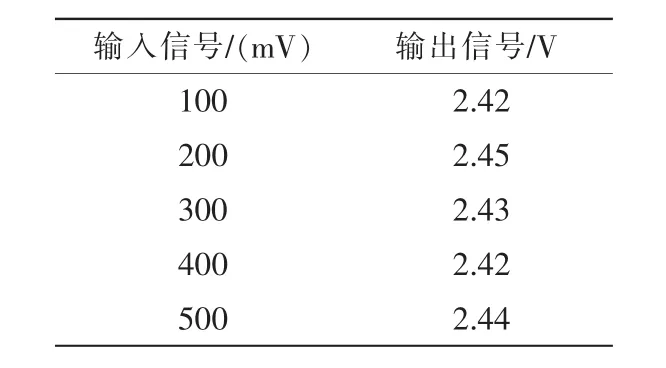
表1 幅值测试结果Tab.1 Amplitude test results
科式质量流量计驱动电路能保持幅值的稳定性具有至关重要的作用,经过大量实验测试,如表1所示,本设计电路采用自动控制增益芯片对信号具有良好的稳幅效果。因此,该芯片完全符合科式质量流量计驱动对幅值稳定性的作用要求。
4.3 功率放大器
功率放大电路的作用是将输入小功率信号进行放大,为振动管提供足够大的驱动力[10]。本电路摒弃了先前国内外文献提出的运用离散元器件组成的功率放大器。因各离散元器件之间参数配合要求极为严格,元器件之间还存在着极大的干扰现象,干扰过大有可能会出现停振或不能起振现象。本设计电路采用TDA8943SF集成运放功率放大器,如图6所示,它是一种低电压、低功耗功率放大器,主要应用于工业领域[10]。这类单片集成电路芯片不仅提供输出短路保护,而且具有闭锁自由运作功能。这样节省了一些不必要的离散元器件组成的电路,避免了由于离散元器件的过多对信号产生干扰,影响科式质量流量计快速稳幅起振。

图6 功率放大器Fig.6 Power amplifier
根据截止频率公式:

计算出输入端所需的电容和电阻的大小配合关系。
对TDA8943SF进行Multisim仿真实验,实验数据结果如图7所示。

图7 功率放大仿真结果Fig.7 Simulation result of power amplifier
仿真实验结果得出的实验数据,表明该款集成功率放大器完全满足科里奥利质量流量计驱动管起振所需的能量。
5 电路测试结果及数据分析
通过上述分析采用自行研制的驱动电路,与一次仪表进行对接,将传感器的输出端接驱动电路的输入端,驱动电路的输出端接电磁激振线圈,用数据采集卡采集数据,在Matlab中生成实验数据曲线图,如图8所示。本文研发的驱动电路能在16 s左右使流量管平稳起振,并达到期望的幅值,比由传统离散元器件组成的驱动电路起振时间22 s速度快,如图9所示。当流量管稳幅振动后,分别对由离散元器件组成的驱动和本文研发的驱动电路加以外界噪声干扰,离散元器件组成的驱动电路需要3 s才能恢复到原来平稳的状态,如图10所示。而本文所研发的驱动电路振动管瞬间偏离原来位置后,又恢复到原来平稳状态,如图11所示,说明该电路具有较强的抗干扰能力,能实现系统固有频率振动,满足科式质量流量计驱动振动管起振所需要求。驱动电路实物图如图12所示。

图8 本研究驱动电路起振实验结果曲线Fig.8 Vibration curve graph of experimental results of the drive circuit
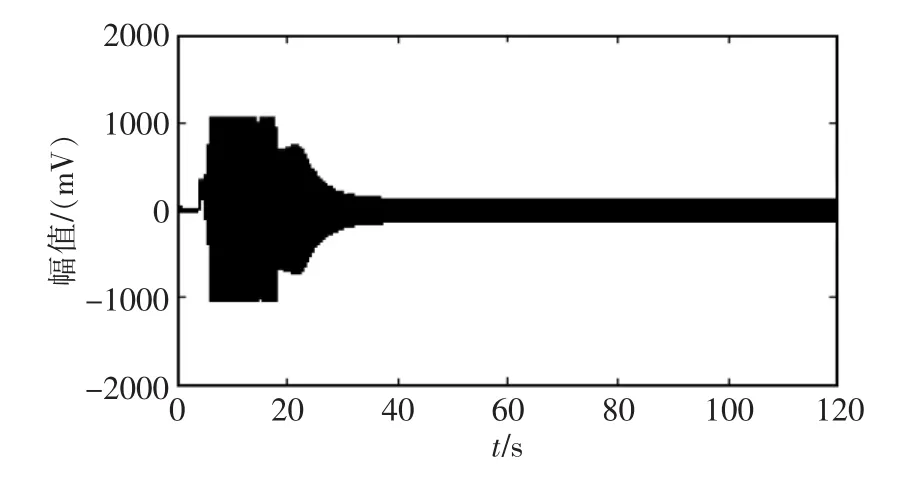
图9 离散元器件组成驱动电路起振实验结果曲线Fig.9 Vibration curve graph of experimental results of driving circuit composed of discrete components

图10 离散元器件组成驱动电路加入干扰实验结果曲线Fig.10 Curve graph of experimental results of driving circuit composed of discrete components after joining interference

图11 本研究驱动电路加入干扰实验结果曲线Fig.11 Curve graph of experimental results of the drive circuit after joining interference

图12 模拟驱动主芯片电路实物Fig.12 Physical map of simulation driver main chip circuit
6 结语
实验结果表明本文采用集成技术研发的科式质量流量计驱动电路结构简单、工作稳定、抗干扰能力强,使流量管快速平稳起振,且大大减少了科式质量流量计驱动的体积,使携带、安装更为方便,对以后研究科式质量流量计模拟驱动具有一定借鉴和参考价值。
[1]徐科军,徐文福.科式质量流量计模拟驱动方法研究[J].计量学报,2005,26(2):149-152.
[2]李苗,徐科军,侯其立,等.数字科氏质量流量计正负阶跃交替激励启振方法[J].仪器仪表学报,2011,31(1):172-177.
[3]涂亚庆,苏奋华,沈廷鳌,等.自适应陷波器的科氏流量计信号频率跟踪方法[J].重庆大学学报,2011,34(10):147-152.
[4]徐科军,于翠欣,苏建徽,等.科里奥利质量流量计激振电路的研制[J].合肥工业大学学报:自然科学版,2000,23(1):37-40.
[5]李苗,徐科军,朱永强,等.科氏质量流量计的3种驱动方法研究[J].计量学报,2011,32(1):1-4.
[6]HENRY M P,ZAMORA M E.Startup and operational techniques for a digital flow meter[P].U.S Patent:No.2006/7146280B2.
[7]CHEN K,ZHENG D ZH,FAN SH CH,et al.Novel coriolis mass flowmeter signal processing algorithms based on DFT and digitalcorrelation[C]//2010 IEEE Symposium on Industrial Electronics and Applications,Penang,2010:56-60.
[8]杨帆,侯宏,李国平,等.科里奥利质量流量计增益控制闭环设计[J]华中科技大学学报:自然科学版,2009,37(4):86-88.
[9]郭文浩,郭斌林.基于AD8367的自动控制增益模块的设计[J].电子器件,2010,33(4):460-462.
[10]南敬昌,杜学坤.基于平衡结构的高效率E类功率放大器设计[J].微电子学,2013,43(5):593-597.
猜你喜欢
军民两用技术与产品(2022年7期)2022-08-06
装备维修技术(2022年7期)2022-07-01
振动与冲击(2022年10期)2022-05-30
电子制作(2018年16期)2018-09-26
中国军转民(2017年11期)2018-01-31
中国工程科学(2017年3期)2017-09-05
电子制作(2017年7期)2017-06-05
电子制作(2016年1期)2016-11-07
火控雷达技术(2016年3期)2016-02-06
