
直线定位平台扰动激励下柔性操作臂的耦合振动特性研究
2016-01-15 02:58刘玉飞,李威,杨雪锋等
振动与冲击 2015年15期
直线定位平台扰动激励下柔性操作臂的耦合振动特性研究
刘玉飞,李威,杨雪锋,王禹桥,路恩
(中国矿业大学机电工程学院,江苏徐州221116)
摘要:以直线定位平台柔性操作臂为对象,根据能量方法建立了系统的耦合动力学模型,考虑驱动过程中存在的运动波动,对直线定位平台的运动特性进行表征,结合建立的耦合动力学模型,得到柔性操作臂的耦合振动特性。通过理论分析和仿真实验,对不同运动特性下运动波动的扰动激励的作用机理进行研究。结果表明:运动波动对柔性操作臂的振动特性具有明显的影响,对于匀速运动情形,在起始阶段随着速度取值的增大,柔性操作臂的振动幅值有所增大,随着响应时间的增加,影响逐渐减小;对于匀加速运动情形,随着加速度取值的增大,柔性操作臂的振动幅值逐渐减小,且较大的加速度对波动的影响起到一定的抑制作用;理论与实验结果一致,验证了所建模型的正确性。研究结果对柔性操作臂的动态特性分析及振动控制具有一定的指导意义。
关键词:定位平台;柔性操作臂;扰动激励;耦合振动;振动控制
中图分类号:TH 112;TH 113.1文献标志码:A
基金项目:国家自然科学基金委创新研究群体基金(51421064);教育部博士点基金(20130041110031);同济大学土木工程防灾国家重点实验室开放基金(SLDRCE12-MB-03)
收稿日期:2014-05-04修改稿收到日期:2014-07-03
Coupled vibration characteristics of flexible manipulators of a linear positioning platform under disturbance excitation
LIUYu-fei,LIWei,YANGXue-feng,WANGYu-qiao,LUEn(School of Mechatronic Engineering, China University of Mining and Technology, Xuzhou 221116, China)
Abstract:The flexible munipulator of a linear positioning platform was taken as a study object. Based on the energy method, the coupled dynamic model of the system was established. Considering motion fluctuations in its driving process, the motion features of the linear positioning platform were described. Subsequently, combining the established coupled dynamic model, the coupled vibration characteristics of the flexible manipulator were derived. The disturbance excitation action mechanisms of different motions’ fluctuations were studied through theoretical analysis and simulations. The results indicated that the motion fluctuations have a significant effect on the vibration characteristics of the flexible manipulator; for the constant velocity motion situations, its vibration amplitudes increases with increase in the motion velocity in the initial stage, and with increase in the response time, the effect decreases; for the constant acceleration motion situations, its vibration amplitudes decreases with increase in the motion acceleration, larger accelerations have a certain suppressing action on the effect of the motion fluctuations; the results of theoretical analysis agree well with those of tests, the correctness of the established model here is verified. The study results provided a guidance for the dynamic analysis and vibration control of flexible manipulators.
Key words:positioning platform; flexible manipulator; disturbance excitation; coupled vibration; vibration control
机器人技术在航空航天、农业、生物医学等领域有着广泛的应用[1-2]。机器人操作系统由驱动装置和操作机构两个基本部件组成[3-4],在驱动装置的驱动下,操作机构通过其末端执行器执行规定的操作任务。随着现代机械装备不断地向轻型化、低能耗等方向发展,柔性操作臂受到越来越多的关注[5-6]。与刚性结构相比,柔性操作臂具有能耗低、轻质、操作灵活等特点[7],广泛应用于航空航天[8-9]、微操作机器人[10-12]、精密制造加工[13-14]等领域。由于柔性操作臂模态较低,关节和连杆处均存在一定的柔性,在执行操作任务的过程中极易产生弹性变形并激发弹性振动,弹性振动的存在将影响系统的操作精度、稳定性和使用寿命[6,15]。例如,采摘机器人操作机构的振动,导致末端执行器抓取不稳,容易对草莓、葡萄、番茄等外表比较柔嫩的果蔬造成损伤[16-17];对于生物医学中的精密操作,柔性操作臂的弹性振动会影响手术成功率,当所操作的对象是具有“生命”的动植物细胞时,如染色体切割、细胞融合、基因注射等,甚至会导致生命的死亡[11,18]。另外,随着装备的高度集成以及操作对象的微型化,对柔性操作臂的操作效率和精度也提出了更高的要求[5,19]。
在研究柔性操作臂的振动特性及控制策略时,通常假设驱动装置具有恒定的运动特性。实际上,以采用电动机作为驱动元件的柔性操作臂系统而言,由于电动机电磁参数和机构惯性等因素的作用,驱动装置的运动并非理想恒定,而是存在一定的波动[20-22]。运动波动的存在势必进一步影响柔性操作臂的振动特性,尤其在精密操作领域,对柔性操作臂的振动特性分析及振动控制将产生一定的误差。因此,为了精确分析柔性操作臂的振动特性并进行有效的振动控制,应考虑驱动装置运动波动的影响。陈立群等[23-24]对轴向变速运动梁的动力稳定性问题进行了深入研究,冯志华等[25-27]研究了基础直线运动柔性梁的非线性动力学特性,Pratiher等[28]将基础视为简谐激励,研究了柔性操作臂的非线性振动特性。然而,目前的研究主要是通过理论数值仿真进行分析,针对具体驱动装置扰动激励下柔性操作臂的振动特性还较少报道,且扰动激励与运动特性之间的关系及作用机理还需要进一步研究,从而有利于抑制扰动的影响。本文以直线定位平台柔性操作臂为对象,对扰动激励下柔性操作臂的振动特性进行研究,分析不同运动特性下扰动激励的作用机理,这对柔性操作臂的振动控制并应用于高速、高精度场合实现精确定位具有重要的意义。
1直线定位平台柔性操作臂的耦合动力学模型
直线定位平台柔性操作臂的结构如图1所示。直线定位平台采用电动机驱动,柔性操作臂通过固定基座固定在直线定位平台上,在直线定位平台的驱动下,柔性操作臂通过其末端执行器执行规定的操作任务。为了简化分析,在建模时,柔性操作臂采用欧拉—伯努利梁进行表征,主要考虑xy平面内柔性操作臂的横向振动,且忽略重力的影响。假设任意时刻t,直线定位平台的位移为s(t),柔性操作臂上任意点P的横向振动位移为w(x,t),则P点的总位移y(x,t)可以表示为
y(x,t)=s(t)+w(x,t)
(1)

图1 直线定位平台柔性操作臂系统结构示意图 Fig.1 Schematic diagram of the linear positioning platform flexible manipulator system
根据假设模态法[29]可得
(2)
式中,qi(t)为柔性操作臂的第i阶广义模态坐标;φi(x)为柔性操作臂的第i阶模态主振型函数,且可以表示为
φi(x)=sin(kix)-sinh(kix)-

(3)
式中,ki4=(ρA/EI)ωi2,ωi为柔性操作臂的第i阶固有频率,ρ为柔性操作臂的质量密度,A为柔性操作臂的横截面面积,E为柔性操作臂的弹性模量,I为柔性操作臂的惯性矩。
结合式(1),系统的动能可以表示为
(4)
式中,L为柔性操作臂的长度,ms为直线定位平台固定基座的质量,y,x表示y(x,t)对x的偏导数,w,t表示w(x,t)对t的偏导数。
同法,系统的势能为
(5)
式中,w,xx表示w(x,t)对x的二阶偏导数。
根据式(2),式(4)和(5)可进一步表示为
(6)
(7)
式中,Mi和Ki分别表示广义质量和广义刚度,且可以表示为
(8)
(9)
式中,φi,xx表示φi(x)对x的二阶导数。
将式(6)和(7)代入拉格朗日方程[30]
(10)
式中,T=Ek-Ep。
由式(6)和(7)可知,存在以下关系
(11)
(12)
(13)
将式(11)~(13)代入式(10),可得直线定位平台驱动过程中柔性操作臂的振动位移方程为
(14)
2扰动激励下柔性操作臂的耦合振动特性
由式(14)可知,分析柔性操作臂的振动特性时需考虑驱动装置的运动特性,因此,首先需对直线定位平台的位移s(t)进行描述。由前面分析可知,对于采用电动机作为驱动元件的直线定位平台而言,由于电磁参数和机构惯性等因素的影响,定位平台的运动存在一定的波动。充分考虑系统的动态特性,将波动表示为函数f(t),则s(t)可以表示为
s(t)=s0(t)+f(t)
(15)
式中,s0(t)为直线定位平台的恒定位移。
易知,f(t)可展开为如下的三角函数形式[31]

(16)
式中,an,bn为傅里叶系数。
为了研究问题的方便,将f(t)表示为正弦函数的形式。则式(15)可进一步表示为
s(t)=s0(t)+γsin(εt)
(17)
式中,γ为波动幅值;ε为波动频率。
将式(17)代入式(14),
(18)
根据杜哈梅积分[29]求解可得
qi(t)=B1icos(ωit)+B2isin(ωit)-
(19)
式中,B1i和B2i由初始条件决定且可以表示为

(20)
由式(19)可知,柔性操作臂的振动特性与定位平台的运动特性及运动波动有关。本文对定位平台具有匀速和匀加速运动特性时柔性操作臂的振动特性进行分析。
定位平台作匀速运动的位移可以表示为
s0(t)=vt
(21)
式中,v为定位平台的运动速度。
将式(21)代入式(19)得
qi(t)=B1icos(ωit)+B2isin(ωit)+
(22)
定位平台作匀加速运动的位移可以表示为
(23)
式中,a为定位平台的运动加速度。
同法,将式(23)代入式(19)得
qi(t)=B1icos(ωit)+B2isin(ωit)-
(24)
根据式(2)、(3)和(22)可得直线定位平台作匀速运动且存在波动时柔性操作臂的振动位移为
(25)
同法,根据式(2)、(3)和(24)可得直线定位平台作匀加速运动且存在波动时柔性操作臂的振动位移为
3仿真实验及分析
为了分析直线定位平台存在运动波动时柔性操作臂的振动特性,利用ADAMS动态仿真软件,建立直线定位平台柔性操作臂系统的样机模型并进行实验研究。为了简化分析,建模时直线定位平台采用质量块(Solids)进行模拟;柔性操作臂(Flexible Bodies)材料属性定义为:长L=575 mm,截面28 mm×1 mm,弹性模量E=197 GPa,密度ρ=7 850 kg/m3,泊松比μ=0.26;柔性操作臂与固定基座之间定义为刚性约束,直线定位平台的运动采用移动副进行模拟,通过在移动副上添加驱动模拟平台的不同运动特性,从而可以对直线定位平台不同运动特性下柔性操作臂的振动特性进行分析。建立的直线定位平台柔性操作臂系统的样机模型如图2所示。在仿真实验的过程中,取柔性操作臂的末端位置进行分析。

图2 直线定位平台柔性操作臂系统的样机模型 Fig.2 Prototype of the linear positioning platform flexible manipulator system
图3和图4为直线定位平台匀速运动时柔性操作臂的振动特性。实验过程中,运动速度分别取v=0.01 m/s,v=0.02 m/s和v=0.03 m/s。不考虑驱动过程中存在的运动波动时,柔性操作臂的振动位移见图3,从图3可以看出,随着速度取值的增大,振动幅值明显变大;当考虑运动波动时,取γ=0.001,ε=15时不同运动速度下柔性操作臂的振动位移见图4,从图4可以看出,在运动的起始阶段,随着速度取值的增大,振动幅值有所增大,而随着时间的增加,影响逐渐减小。

图3 恒定匀速运动时柔性操作臂振动位移 Fig.3 Vibration displacements of the flexible manipulator under constant velocity motions

图4 匀速运动带波动时柔性操作臂振动位移(γ=0.001 ε=15) Fig.4 Vibration displacements of the flexible manipulator under velocity motions (γ=0.001 ε=15)
为进一步分析匀速运动时运动波动对柔性操作臂振动特性的影响,取速度v=0.01 m/s时,分别对γ=0.003ε=5,γ=0.001ε=15,γ=0.003ε=15时柔性操作臂的振动特性进行分析,见图5。从图5可以看出,匀速运动时运动波动对柔性操作臂的振动特性具有明显的影响,随着波动幅值γ和波动频率ε的增大,振动幅值变大,且振动响应对波动频率ε更为敏感。
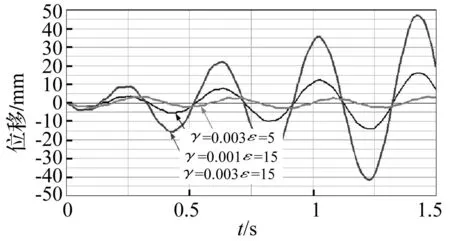
图5 匀速运动时波动对柔性操作臂 振动特性的影响(v=0.01 m/s) Fig.5 Impact of the disturbances on the flexible manipulator under velocity motion (v=0.01 m/s)
图6和图7为直线定位平台匀加速运动时柔性操作臂的振动特性。实验过程中,加速度分别取a=0.1 m/s2,a=0.2 m/s2和a=0.3 m/s2。不考虑驱动过程中存在的运动波动时,柔性操作臂的振动位移见图6,从图6可以看出,随着加速度取值的增大,振动幅值明显变大;当考虑运动波动时,取γ=0.001,ε=15时不同加速度下柔性操作臂的振动位移见图7,从图7可以看出,随着加速度取值的增大,振动幅值逐渐减小,由此可以说明,较大的加速度对波动的影响起到一定的抑制作用。
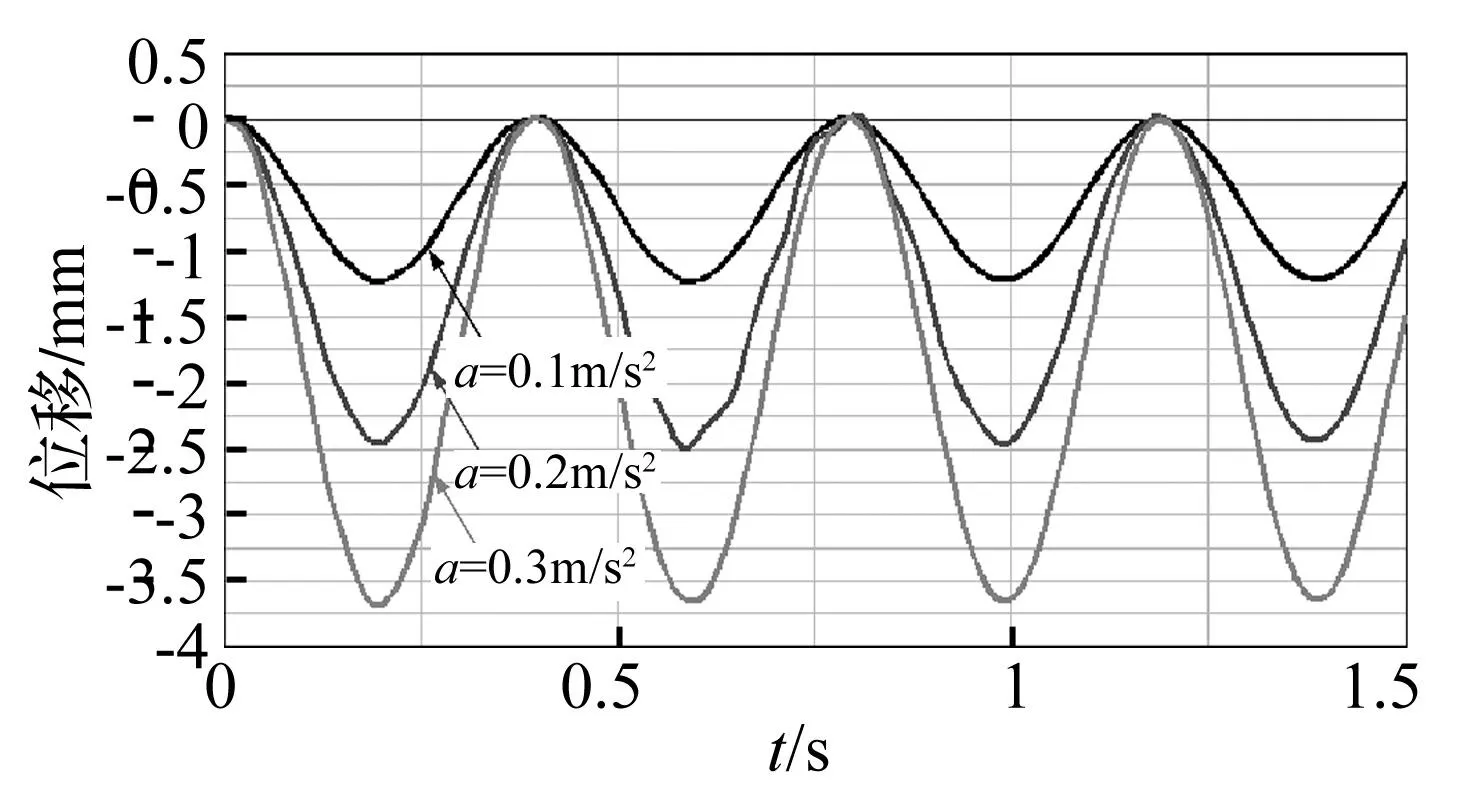
图6 恒定匀加速运动时柔性操作臂振动位移 Fig.6 Vibration displacements of the flexible manipulator under constant acceleration motions

图7 匀加速运动带波动时柔性 操作臂振动位移(γ=0.001 ε=15) Fig.7 Vibration displacements of the flexible manipulator under acceleration motions (γ=0.001 ε=15)
图8 匀加速运动时波动对柔性操作 臂振动特性的影响(a=0.1 m/s 2) Fig.8 Impact of the disturbances on the flexible manipulator under acceleration motion (a=0.1 m/s 2)
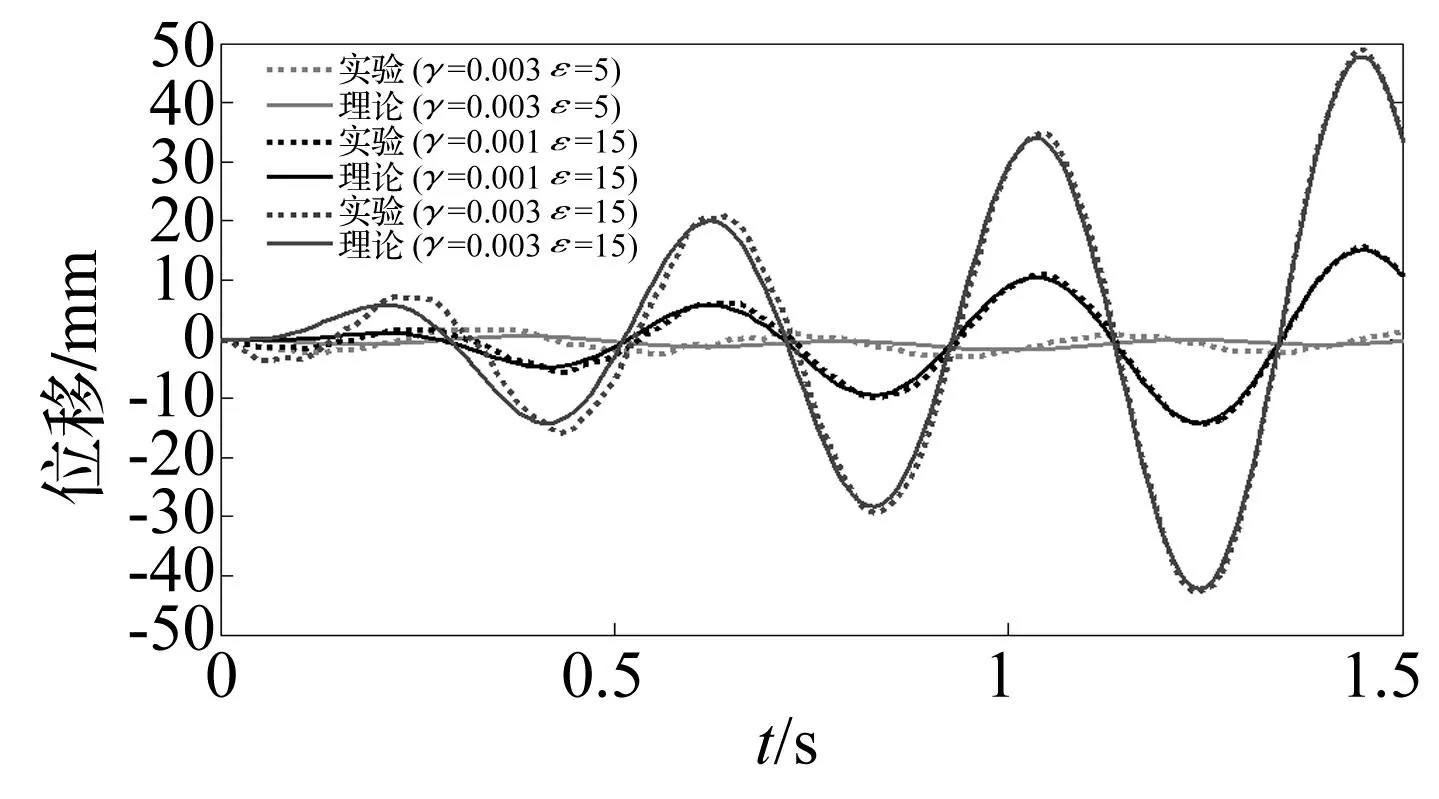
图9 匀加速运动时柔性操作臂振动 特性的理论和实验结果(a=0.1 m/s 2) Fig.9 Theoretical and experimental vibration characteristics of the flexible manipulator (a=0.1 m/s 2)
为进一步分析匀加速运动时运动波动对柔性操作臂振动特性的影响,取加速度a=0.1 m/s2时,分别对γ=0.003ε=5,γ=0.001ε=15,γ=0.003ε=15时柔性操作臂的振动特性进行分析,如图8所示。从图8可以看出,匀加速运动时运动波动对柔性操作臂的振动特性具有明显的影响,随着波动幅值γ和波动频率ε的增大,振动幅值变大,且振动响应对波动频率ε更为敏感,此结论与匀速运动具有一致性。
以上从仿真实验的角度对扰动激励下柔性操作臂的振动特性进行了分析。为了验证本文建立的耦合动力学模型,将直线定位平台匀加速运动时柔性操作臂振动特性的理论和实验结果进行对比,见图9。从图9可以看出,理论分析与实验结果比较吻合,运动波动对振动特性的影响和变化趋势一致。直线定位平台匀速运动的情况可视为匀加速运动的特例,由此可以说明本文所建模型及分析结果的正确性。
4结论
本文考虑运动波动的扰动激励,建立了直线定位平台柔性操作臂系统的耦合动力学模型,并对柔性操作臂的耦合振动特性进行了理论分析及实验研究。结果表明:
(1)存在运动波动时,运动波动对柔性操作臂的振动特性具有明显的影响。对于匀速运动,在驱动的起始阶段,随着速度取值的增大,柔性操作臂的振动幅值有所增大,随着响应时间的增加,影响逐渐减小;对于匀加速运动,随着加速度取值的增大,柔性操作臂的振动幅值逐渐减小,较大的加速度对波动的影响起到一定的抑制作用。
(2)随着波动幅值和波动频率的增大,柔性操作臂的振动幅值变大且对波动频率更为敏感。
(3)在进行柔性操作臂的动态特性分析及振动控制时应考虑运动波动的影响;根据本文的结果,可通过优化驱动装置的运动特性、设计控制策略实现柔性操作臂的振动控制及精确定位操作。
参考文献
[1]雷源忠.我国机械工程研究进展与展望[J].机械工程学报,2009,45(5):1-11.
LEI Yuan-zhong. Recent research advances and expectation of mechanical engineering science in China[J]. Chinese Journal of Mechanical Engineering, 2009, 45(5): 1-11.
[2]蔡鹤皋.机器人将是21世纪技术发展的热点[J].中国机械工程,2000,11(1/2):58-60.
CAI He-gao.Robot will be a hot spot of technological development in the twenty first century[J]. China Mechanical Engineering,2000,11(1/2): 58-60.
[3]Mohsen D, Nader J, Zeyu L, et al. An observer-based piezoelectric control of flexible cartesian robot arms: theory and experiment[J].Control Engineering Practice,2004,12(8):1041-1053.
[4]邱志成.刚柔耦合系统的振动主动控制[J].机械工程学报,2006,42(11):26-33.
QIU Zhi-cheng. Active vibration control for coupling system of flexible structures and rigid body[J]. Chinese Journal of Mechanical Engineering, 2006,42(11):26-33.
[5]雷源忠.我国机械工程研究进展与展望[J].机械工程学报,2009,45(5):1-11.
LEI Yuan-zhong. Recent research advances and expectation of mechanical engineering science in China[J]. Chinese Journal of Mechanical Engineering,2009,45(5):1-11.
[6]Dwivedy S K, Eberhard P. Dynamic analysis of flexible manipulators, a literature review[J].Mechanism and Machine Theory,2006,41(7):749-777.
[7]高峰.机构学研究现状与发展趋势的思考[J].机械工程学报,2005,41(8):3-17.
GAO Feng. Reflection on the current status and development strategy of mechanism research[J].Chinese Journal of Mechanical Engineering,2005,41(8):3-17.
[8]黄文虎,曹登庆,韩增尧.航天器动力学与控制的研究进展与展望[J].力学进展,2012,42(4):367-394.
HUANG Wen-hu, CAO Deng-qing, HAN Zeng-yao. Advances and trends in dynamics and control of spacecrafts[J].Advances in Mechanics,2012,42(4):367-394.
[9]Zhao Jie-liang, Yan Shao-ze, Wu Jia-ning. Analysis of parameter sensitivity of space manipulator with harmonic drive based on the revised response surface method[J].Acta Astronautica,2014,98:86-96.
[10]负远,徐青松,李杨民.并联微操作机器人技术及应用进展[J].机械工程学报,2008,44(12):12-23.
YUN Yuan, XU Qing-song, LI Yang-min. Survey on parallel manipulators with micro/nano manipulation technology and application[J].Chinese Journal of Mechanical Engineering,2008,44(12):12-23.
[11]肖晶晶,杨洋,李大寨,等.眼科显微手术机器人研究进展及关键技术分析[J].机械工程学报,2013,49(1):15-22.
XIAO Jing-jing, YANG Yang, LI Da-zhai, et al. Advances and key techniques of ophthalmic microsurgical robots[J].Chinese Journal of Mechanical Engineering,2013,49(1):15-22.
[12]于保军,杨志刚,齐会良,等.基于显微视觉的宏/微双驱动微动台系统[J].农业机械学报,2008,39(2):125-129.
YU Bao-jun, YANG Zhi-gang, QI Hui-liang, et al. Research on macro-micro dual-drive micro-locomotion platform based on micro-vision[J].Transactions of the Chinese Society for Agricultural Machinery,2008,39(2):125-129.
[13]潘玉龙,吴丹,宋立滨,等.多孔板微阵列制备机器人系统的设计与研究[J].机器人,2011,33(1):136-141.
PAN Yu-long, WU Dan, SONG Li-bin, et al. Design and research of robot microarrayer system for microplate[J].Robot,2011,33(1):136-141.
[14]孙立宁,陈立国,荣伟彬,等.面向微机电系统组装与封装的微操作装备关键技术[J].机械工程学报,2008,44(11):13-19.
SUN Li-ning, CHEN Li-guo, RONG Wei-bin, et al. Key techniques of micromanipulation devices for MEMS assembling and packaging[J].Chinese Journal of Mechanical Engineering,2008,44(11):13-19.
[15]吴立成,杨国胜,郐新凯,等.柔性臂机器人:建模、分析与控制[M].北京:高等教育出版社,2012.
[16]宋健,张铁中,徐丽明,等.果蔬采摘机器人研究进展与展望[J].农业机械学报,2006,37(5):158-162.
SONG Jian, ZHANG Tie-zhong, XU Li-ming, et al. Research actuality and prospect of picking robot for fruits and vegetables[J]. Transactions of the Chinese Society for Agricultural Machinery, 2006, 37(5):158-162.
[17]李秦川,胡挺,武传宇,等.果蔬采摘机器人末端执行器研究综述[J].农业机械学报,2008,39(3):175-179.
LI Qin-chuan, HUTing, WU Chuan-yu, et al. Review of end-effectors in fruit and vegetable harvesting robot[J]. Transactions of the Chinese Society for Agricultural Machinery, 2008, 39(3):175-179.
[18]李杨民,汤晖,徐青松,等.面向生物医学应用的微操作机器人技术发展态势[J].机械工程学报,2011,47(23):1-13.
LI Yang-min, TANG Hui, XU Qing-song, et al. Development status of micromanipulator technology for biomedical applications[J].Chinese Journal of Mechanical Engineering,2011,47(23):1-13.
[19]纪华伟,杨世锡,吴昭同.一体化微操作器误差分析与建模[J].农业机械学报,2007,38(3):136-140.
JI Hua-wei, YANG Shi-xi, WU Zhao-tong. Error analysis and modeling of monolithic micromanipulator[J]. Transactions of the Chinese Society for Agricultural Machinery, 2007, 38(3):136-140.
[20]岳士岗,白师贤.输入转速波动对柔性连杆机构振动平衡特性的影响[J].机械科学与技术,1994(1):59-64.
YUE Shi-gang, BAI Shi-xian. Influence of the input speed fluctuation on the vibration and balance of flexible linkage mechanism[J].Mechanical Science and Technology,1994(1):59-64.
[21]Liou F W, Erdman A G, Lin C S. Dynamic analysis of a motor-gear-mechanism system[J].Mechanism and Machine Theory,1991,26(3):239-252.
[22]Andreaus U, Casini P. Dynamics of friction oscillators excited by a moving base and/or driving force[J]. Journal of Sound and Vibration, 2001, 245(4):685-699.
[23]Chen Li-qun,Yang Xiao-dong.Stability in parametric resonance of axially moving viscoelastic beams with time-dependent speed[J].Journal of Sound and Vibration,2005,284:879-891.
[24]丁虎,陈立群,戈新生.混杂边界条件下轴向变速运动毅弹性梁参数振动的稳定性[J].振动与冲击,2008,27(11):62-63.
DING Hu, CHEN Li-qun, GE Xin-sheng. Stability analysis of parametric resonance of an axially accelerating viscoelastic beam with hybrid supports[J]. Journal of Vibration and Shock, 2008, 27(11):62-63.
[25]冯志华,胡海岩.内共振条件下直线运动梁的动力稳定性[J].力学学报,2002,34(3):389-400.
FENG Zhi-hua, HU Hai-yan. Dynamic stability of a slender beam with internal resonance under a large linear motion[J].Acta Mechanica Sinica,2002,34(3):389-400.
[26]冯志华,胡海岩.直线运动柔性梁非线性动力学一主参数共振与内共振联合激励[J].振动工程学报,2004,17(2):126-131.
FENG Zhihua, HU Haiyan. Nonlinear dynamics of flexible beams undergoing a large linear motion of basement: principal parametric and internal resonances [J]. Journal of Vibration Engineering, 2004, 17(2):126-131.
[27]冯志华,胡海岩.直线运动柔性梁非线性动力学—组合参数共振与内共振联合激励[J].振动工程学报,2004,17(3):253-257.
FENG Zhi-hua, HU Hai-yan. Nonlinear dynamics of flexible beams undergoing a large linear motion of basement: combinational parametric and internal resonances[J].Journal of Vibration Engineering,2004,17(3):253-257.
[28]Pratiher B, Dwivedy S K. Non-linear dynamics of a flexible single link Cartesian manipulator [J]. International Journal of Non-Linear Mechanics, 2007, 42(9): 1062-1073.
[29]Rao S S.机械振动[M].李欣业,张明路,译.4版.北京:清华大学出版社,2009.
[30]Gross D, Hauger W, Schröder J, et al. Engineering Mechanics 3: Dynamics, Springer, London, 2011.
[31]梁昆淼.数学物理方法[M].北京:高等教育出版社,1978.

第一作者冯海月女,硕士生,1990年生
通信作者伊廷华男,博士,教授,博士生导师,1979年生
