
反鱼雷鱼雷自适应滑模导引律
2016-01-06 03:46李宗吉,张西勇,练永庆
弹道学报 2015年1期
关键词:鲁棒性
反鱼雷鱼雷自适应滑模导引律
李宗吉,张西勇,练永庆
(海军工程大学 兵器工程系,武汉 430033)
摘要:针对在目标机动性加大的情况下常规鱼雷导引方法不能满足反鱼雷鱼雷迎面拦截来袭鱼雷需求的问题,为提高反鱼雷鱼雷拦截概率,提出了利用滑模观测/微分器对来袭鱼雷视线角速率进行估计的方法,基于李雅普诺夫稳定性理论,根据准平行接近的原理,推导出一种自适应滑模导引律。将该方法运用于反鱼雷鱼雷跟踪拦截,仿真结果表明,该导引律对干扰和参数摄动具有强鲁棒性,与传统比例导引法相比,其对机动目标的导引精度高,脱靶量小,可以满足反鱼雷战技术的需求。
关键词:反鱼雷鱼雷;导引律;变结构控制;鲁棒性
收稿日期:2014-04-22
作者简介:李宗吉(1974- ),男,副研究员,研究方向为鱼雷制导与控制。E-mail:lizongji507@163.com。
中图分类号:TJ630.3文献标识码:A
Anti-torpedo-torpedoAdaptiveSlidingModeGuidance
LIZong-ji,ZHANGXi-yong,LIANYong-qing
(DepartmentofWeaponryEngineering,NavalUniversityofEngineering,Wuhan430033,China)
Abstract:For highly maneuvering targets,the guidance law of traditional torpedo can’t satisfy the requirement of anti-torpedo-torpedo frontally intercepting incoming torpedo.Aiming at this problem,the LOS angular rate was estimated by using the sliding mode observer/differentiator.An adaptive sliding mode guidance law was proposed based on Lyapunov’s stability theory.The method was applied in tracking and interception of anti-torpedo-torpedo.The simulation results show that the guidance law is highly robust to noise and parameter disturbance.Campared with the traditional proportional guidance law,the proposed law has high accuracy,and the miss distance is small.The proposed law can satisfy the tactical and technical requirement of anti-torpedo torpedo.
Keywords:anti-torpedo-torpedo;guidancelaw;variablestructurecontrol;robustness
鱼雷的导引方式直接影响鱼雷的弹道,鱼雷的弹道则体现了对鱼雷机动性的需求。鱼雷的导引弹道取决于2个因素:一是目标的运动,二是导引方式[1-2]。导引方式对弹道特性的影响主要包括弹道的法向过载、跟踪时间以及与目标的相遇角等方面,这些都会影响到鱼雷的命中概率,其中,法向过载这一指标最为重要,它直接影响到脱靶量和导引方式实现的可能性。反鱼雷鱼雷与鱼雷不同,所要拦截的目标是来袭鱼雷,而来袭鱼雷的机动性、速度远远高于舰艇,且辐射噪声水平低,目标强度小,通常要求采取迎面拦截弹道,所以反鱼雷鱼雷的弹道也就更加复杂[3-4]。为了提高反鱼雷鱼雷拦截概率,本文首先利用滑模观测/微分器对难以直接测量的来袭鱼雷角速率进行估计,然后提出一种自适应滑模导引方法。
1反鱼雷鱼雷的自适应滑模导引法
选取视线坐标系作为研究反鱼雷鱼雷导引过程的参考系,水平面作为反鱼雷鱼雷的拦截平面,则反鱼雷鱼雷-来袭鱼雷的相对运动关系如图1所示[5-6]。图中,A代表反鱼雷鱼雷,T代表鱼雷,r为反鱼雷鱼雷与来袭鱼雷之间的相对距离,q为视线角,η为来袭鱼雷舷角,ψ为反鱼雷鱼雷航向角。
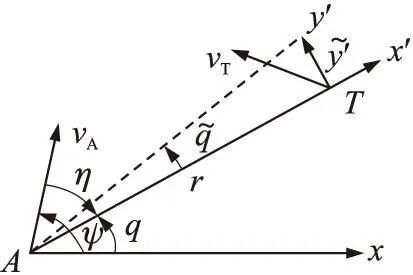
图1 拦截坐标系定义

(1)
(2)
(3)
且有
(4)
据此,可得:

(5)


(6)
因此,得到如下的自适应滑模趋近律:
(7)
进一步推导可得自适应滑模导引律:
(8)
取Lyapunov函数为
(9)
求导可得:

(10)

(11)
2滑模观测/微分器及视线角速率估计

(12)
(13)

在式(12)与式(13)所示的SMOD的基础上,引入一个非线性低通滤波器,可得到一种修正的滑模观测/区分器:
(14)

(15)
J0=χ+e
(16)
(17)
式中:e为实际信号与估计值间的误差;χ,J0为中间量;k1,k2为可调节系数。式(15)、式(16)为非线性动态滑模面。当J0=0时,由式(16)可知:
(18)

图2 基于NDSM与SMOD的LOS估计
3弹道仿真及分析

图3表明,利用SMOD对视线角速度进行估计,采用ASMG导引律使得反鱼雷鱼雷能够有效拦截来袭鱼雷。
图3 拦截弹道
图4 脱靶量累积分布
仿真结果表明:在视线角存在测量误差的条件下,基于SMOD的ASMG导引律的导引概率与导引精度均高于PN导引律;视线角噪声越小,导引精度越高;τay越小,导引精度越高,即提高反鱼雷鱼雷机动能力可以提高导引精度。
4结论
首先利用SMOD方法对视线角速度进行估计,然后据此提出了反鱼雷鱼雷自适应滑模导引法。研究结果表明:在视线角存在测量误差的条件下,基于SMOD的自适应滑模导引律的导引概率与导引精度均高于比例导引律;提高视线角信号的信噪比及反鱼雷鱼雷的机动能力,可以有效提高反鱼雷鱼雷的命中概率。
参考文献
[1]ZARCHENP.Proportionalnavigationandwavingtargets.Guidance,ControlandDynamics,1995,18(5):1 131-1 136.
[2]LIWen-zhe,ZHANGYu-wen,FANHui.Torpedo’sautomaticallyadjustleadangleguidetrajectorysimulationbasedonsimulink.JournalofSystemSimulation,2009,21(10):3 003-3 005.
[3]薛昌友,孙雪海,杜亮.声自导鱼雷固定提前角导引法追踪效果研究.舰船科学技术,2011,33(3):112-115.
XUEChang-you,SUNXue-hai,DULiang.ResearchontrackeffectofacoustichomingtorpedowithFLAG.ShipScienceandTechnology,2011,33(3):112-115.(inChinese)
[4]严卫生,任 章,徐德民.迎面拦截变结构导引律及其应用研究.西北工业大学学报,2000,18(4):616-620.
YANWei-sheng,RENZhang,XUDe-min.Ahead-onimpactvariablestructureguidancelaw.JournalofNorthwesternPolytechnicalUniversity,2000,18(4):616-620.(inChinese)
[5]田宏亮,梁晓庚,贾晓洪.视线角速度测量干扰对制导系统的影响.弹道学报,2012,24(3):65-69.
TIANHong-liang,LIANGXiao-geng,JIAXiao-hong.Researchofeffectofline-of-sightratemeasurementdisturbonnavigationsystem.JournalofBallistics,2012,24(3):65-69.(inChinese)
[6]王凯,黄长强,李望西.一种新型自适应滑模制导律及其仿真研究.弹箭与制导学报,2009,29(5):80-83.
WANGKai,HUANGChang-qiang,LIWang-xi.Anewadaptiveslidingmodeguidancelawanditssimulationstudy.JournalofProjectiles,Rockets,MissilesandGuidance,2009,29(5):80-83.(inChinese)
[7]GATLEYSL,BATESDG,POSTLETHWAITEI.Partitioningandre-designofH∞Loopshaping integrated flight and propulsion control systems//AIAAGuidance,NavigationandControlConferenceandExhibit.Montreal,Canada:AIAA,2001:1-11.
[8]DWIVEDIPN,TIWARISN,BHATTACHARYAA.AZEMbasedeffectiveintegratedestimationandguidanceofinterceptorsinterminalphase//AIAAGuidance,Navigation,andControlConference.Ontario,Canada:AIAA,2010:1-25.
[9]ZHURBALA,IDANM.Effectofestimationontheperformanceofanintegratedmissileguidanceandcontrolsystem//AIAAGuidance,NavigationandControlConferenceandExhibit.Honolulu,Hawaii:AIAA,2008:1-24.
猜你喜欢
科技研究·理论版(2021年22期)2021-04-18
农业机械学报(2020年2期)2020-03-09
科技与创新(2017年1期)2017-02-16
计算机应用(2016年12期)2017-01-13
电脑知识与技术(2016年28期)2016-12-21
汽车科技(2016年5期)2016-11-14
科教导刊·电子版(2016年23期)2016-10-31
科技视界(2016年16期)2016-06-29
电脑知识与技术(2016年9期)2016-05-18
科技资讯(2015年19期)2015-10-09
