
基于成像点轨迹的末段修正弹控制策略
2016-01-06 03:46李兴隆,王晓鸣,姚文进等
弹道学报 2015年1期
关键词:控制策略
基于成像点轨迹的末段修正弹控制策略
李兴隆1,王晓鸣1,姚文进1,吴银海2
(1.南京理工大学 智能弹药国防重点学科实验室,南京 210094;2.73146部队,福建 泉州 362000)
摘要:针对激光半主动末段修正弹的控制策略问题,提出了根据激光探测器上目标成像点运动轨迹确定控制策略的方法。根据实时测量的弹体滚转角,建立了弹体滚转解耦模型;分析了弹体滚转解耦后的目标成像点轨迹,得到脉冲发动机启控时机和点火相位角;通过六自由度弹道仿真,研究了某型末段修正弹在该控制策略下的修正效果。结果表明,采用文中修正策略后,脱靶量显著减小,圆概率误差从48.1 m减小到14.6 m,且对弹道偏差的侧向修正效果比纵向修正效果更好,对脉冲控制末修弹药的脉冲参数优化和导引律设计具有参考价值。
关键词:末段修正弹;脉冲修正;控制策略;激光半主动制导;制导律
收稿日期:2014-01-13
基金项目:中央高校基本科研业务费专项资金资助项目(30920130122001)
作者简介:李兴隆(1988- ),男,博士研究生,研究方向为智能弹药技术。E-mail:lixinglong.sj@163.com。
中图分类号:TJ43文献标识码:A
ControlStrategyofTerminalCorrectionProjectileBasedon
theTrackofTargetImagingPoints
LIXing-long1,WANG Xiao-ming1,YAO Wen-jin1,WU Yin-hai2
(1.ZNDYofMinisterialKeyLaboratory,NUST,Nanjing,210094,China;2.Unit73146ofPLA,Quanzhou362000,China)
Abstract:Aiming at the control strategy of semi-active laser terminal-correction-projectile(TCP),a method of determining the control strategy according to the track of target imaging points was proposed.The rolling decoupling model was built by measuring the rolling angle real-timely.The track of target imaging points after rolling decoupling was analyzed,and the pulse firing time and firing phase angle were obtained.The correction effect of a certain type TCP was studied under this control strategy through simulating the trajectory of six-degree-freedom.The results show that by using correction strategies,the miss distance decreases significantly,and the circular error probability decreases from 48.1m to 14.6m,and the correction effect in cross direction is better than range direction.The result has important significance to pulse parameters optimization and the design of guidance law.
Keywords:terminalcorrectionprojectile;pulsecorrection;controlstrategy;semi-activelaserguidance;guidancelaw
传统无控弹丸落点散布大,激光半主动末段修正弹在弹道末段根据探测器得到的目标方位信息,在适当的时机以一定的角度将脉冲发动机点火,通过脉冲力作用有效修正落点偏差。
国内葛贤坤提出当单级脉冲力修正后计算的弹道偏差小于此级脉冲作用前弹道偏差的一半时,脉冲开始点火,此修正策略需根据弹丸实时位置信息来估计落点。刘晨涛提出根据单个脉冲对速度矢量的修正角度,得到脉冲发动机点火的阈值,但是需要当前弹丸速度信息。姚文进提出基于实时弹目偏差的控制策略,但是需要实时计算最终弹目偏差。张成提出脉冲修正横向制导律和纵向制导律,需要弹载GPS提供位置和速度信息。国外JitpraphalT比较了脉冲修正火箭弹的3种导引律对落点散布的影响,但也需要弹丸当前位置或速度信息。上述国内外研究的脉冲点火策略都需要得到弹丸的实时位置或速度信息,各种传感器的使用不仅增加了成本,传感器的误差也会降低末修弹的命中精度,为此本文提出一种新的控制策略,仅需提供弹丸的滚转角信息,通过滚转解耦后得到成像面上目标点轨迹,分析弹目相对位置关系,推导得到最佳脉冲点火时机和点火相位角,并采用蒙特卡洛法模拟打靶仿真进行验证,结果表明本文的控制策略能有效减小脱靶量,满足修正精度要求,为末段修正弹导引律设计提供一定参考。
1目标在成像面上的运动轨迹
捷联导引头的探测器与弹体完全固连,接收目标反射回来的激光信号,在成像面上得到成像点的运动轨迹。定义地面坐标系OXYZ,其原点在炮口断面中心;OX轴沿水平线指向射击方向,OY轴铅直向上;OZ轴按右手法则,确定为垂直于射击面指向右方。定义弹体坐标系OX1Y1Z1,原点为质心,OX1轴为弹轴,OY1和OZ1轴固连在弹体上并与弹体一同绕纵轴OX1旋转。定义成像坐标系O′XgYgZg与弹体坐标系存在镜面成像变换的关系,如图1所示,图中,σ为脉冲发动机点火相位角。
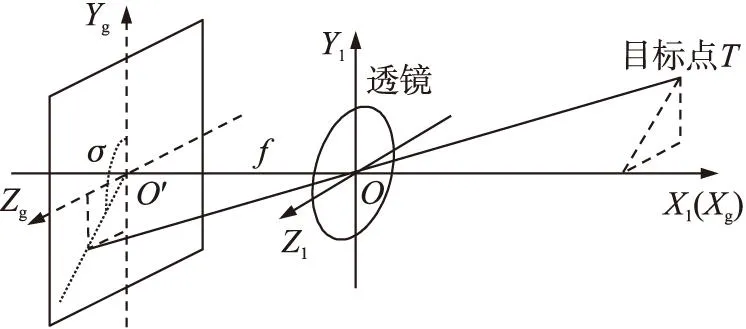
图1 光轴坐标系与弹体坐标系的变换关系
在基准系下弹丸的实时坐标为(x0,y0,z0),目标点的坐标为(xt,yt,zt),则弹体系下目标点的坐标(xt1,yt1,zt1)为
(1)
式中:φa,φ2,γ分别为弹轴高低角、弹轴方位角和滚转角。令镜头焦距f=0.1m,由于成像面是置于焦平面上的,故在光轴坐标系中,恒有:xgt=f。成像面上目标轨迹其实是目标在成像坐标系中Yg-Zg平面上的点坐标,设为(ygt,zgt),根据镜面成像几何关系,有:
(2)
取激光探测器视场角为±8°,当目标进入视场内后,由于探测器与弹体完全捷联,随着弹丸的滚转,目标在成像面上的轨迹成螺线,如图2所示。
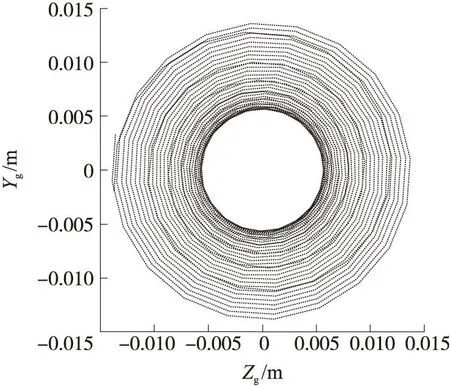
图2 目标在成像面上的轨迹
显然从这种轨迹线中无法得出弹丸与目标相对位置信息。利用弹载传感器实时测量得到的滚转角γt,对弹体滚转耦合的轨迹进行反旋补偿:
(3)
得到的滚转解耦后的轨迹能够反映目标相对弹丸位置信息,如图3所示。
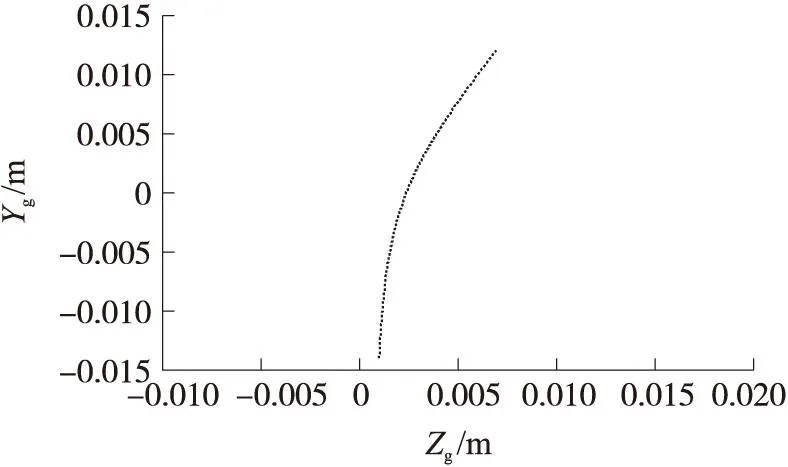
图3 滚转解耦后目标在成像面上的轨迹
2基于成像点轨迹的控制策略
①从末修弹探测到目标开始,目标在成像面上的轨迹如图2所示,轨迹类似圆周曲线特性,且半径逐渐减小到一定程度后开始发散,此时无控弹道开始偏离目标,需要修正;
②从末修弹探测到目标开始,类圆周曲线半径一直减小直至为0,此时弹丸正好命中目标,无需修正。
国内相关研究普遍采用的点火逻辑如文献所述:仅当误差角超过某一范围(探测器修正阈值)才对飞行弹道进行修正。图4为目标进入探测器视场后误差角变化曲线。显然,在目标刚进入探测器视场后,误差角很大,随着弹丸不断接近目标误差角才逐渐减小,可见不能仅以误差角阈值作为判断修正启动的准则。
根据对以上2种情况的分析,随着误差角开始增大,弹体开始逐渐偏离目标,因此提出修正策略:以成像轨迹开始远离中心即误差角开始增大的时刻作为脉冲发动机启控时机,如图4所示。
图4 误差角变化曲线
此后脉冲发动机开始逐个点火,点火相位角σ为喷管在弹轴坐标系中与OYg轴的夹角,如图1所示。若启控时刻成像点纵坐标ygt>0,则目标相对弹丸在射程方向的后方,应该向后修正;若此刻成像点横坐标zgt>0,则目标相对弹丸在偏流方向的右方,应该向右修正,因此整体修正力方向为右后方。同理得到其他3个象限的修正力方向,点火相位方向与修正力方向相差180°,根据成像点坐标得到点火相位角表达式:
(4)
文献的研究表明,将脉冲发动机位置安装在质心处,修正效率已经很可观,且弹体由于脉冲力作用产生的章动最小。因此,将质心位置的脉冲发动机点火后,只存在脉冲力作用,无力矩作用,将脉冲力F向速度坐标系投影得到:
(5)
式中:δ1,δ2分别为高低攻角和方向偏角,在常规六自由度弹道模型中加入上述脉冲修正模型就可得到脉冲控制的弹道模型。
3数值仿真与分析
为验证此控制策略,以某型120mm末段修正弹为研究对象,弹丸质量m=13.45kg,初速v=340m/s,发射角θ=45°,在标准气象条件下进行六自由度弹道仿真,采用8级脉冲发动机控制,单个脉冲冲量为30N·s,持续作用时间为10ms。单次脉冲作用后,弹体会出现章动现象,为避免弹体不稳定运动带来的探测误差,采用“一次探测,多次修正”的模式,即当控制策略决定启控后,为保证脉冲控制力的平均方位尽量在点火相位方向上,每个脉冲需转到特定弹体方位时才点火作用,因此弹丸滚转角的测量精度对修正精度有重要影响。
3.1 控制策略原理验证
为研究该控制策略对不同距离误差、不同方位误差的修正效果,以45°射角发射的无控弹丸落点为中心,取5个不同方位的目标点,分别是正前方(0°),右前方(45°),正右方(90°),右后方(135°)和正后方(180°),设计了3组仿真试验,目标与无控落点的偏差距离分别为40m、60m、80m,图5为其中一组(目标偏差距离80m)的末段弹道。
如图5所示,当目标点在不同方位时,由控制策略决定启控时机和脉冲点火相位角,经修正后的落点明显向目标点靠近。图6、图7分别为其中一组末段弹道仿真的弹丸高低攻角和方向攻角。
图5 末段修正弹道
图6 末段弹道高低攻角变化曲线
图7 末段弹道方向攻角变化曲线
当瞬时脉冲力作用于弹体后,攻角出现振荡,高低攻角和方向攻角最大幅值没有超过2.3°,大约3s后攻角逐渐减小并趋于0°,说明脉冲力作用不影响飞行稳定性。
对3组不同偏差距离目标的修正情况进行统计,比较其落点的脱靶量,结果如表1所示。表中Rmiss为脱靶量。
由表1得知,修正后的脱靶量明显减小,且侧向偏差的修正效果要好于纵向偏差的修正效果,当目标偏差在落点正右方时,修正效果最好。这是因为当只存在侧向偏差时,控制策略得到的脉冲力作用角度为90°,脉冲力的作用效果完全用于弹道偏差的修正;当目标位置同时存在纵向和侧向偏差或仅存在纵向偏差时,由式(4)得知,脉冲力作用角度仅考虑了目标偏差方位角,并没有考虑脉冲力作用引起的弹丸飞行射程的变化,因此侧向修正效果好于其他方向修正效果。
表1 末段修正前后脱靶量统计
3.2 蒙特卡洛法模拟打靶
为模拟弹丸实际发射过程、飞行过程和末段弹道修正过程,采用蒙特卡洛法模拟打靶。首先确定发射时各种随机变量及其分布律,如质量误差、初速误差和射角误差等;根据各随机变量的分布律构造其概率模型[10],将此初始随机扰动模型代入到无控弹道模型中,进行仿真计算,可得到弹丸无控飞行落点。通过数理统计方法得到无控落点的平均值,以此落点均值作为目标点,在弹道模型中加入脉冲力控制模型;采用相同的初始条件和相同扰动源进行蒙特卡洛法仿真200次,得到经末段修正后的落点散布,为方便显示,取其中50组数据,其修正前后的落点散布对比如图8所示。
图8 无控落点和修正后落点的散布对比
分析图8结果得知,采用此控制策略后的落点散布明显比无控落点散布小,尤其是离偏差较远的弹道落点经修正后脱靶量显著减小。经过数理统计得到的落点密集度(BX,BZ)和圆概率误差(CEP)e,如表2所示。
表2 控制策略修正效果
由表2得知,修正后的圆概率误差从48.1m减小到14.6m,减小幅值达69.6%,证明此控制策略在原理上是可行的。
末修弹的修正效果不仅与启控时机有关,还与脉冲点火相位角以及脉冲冲量大小有关。因此,综合考虑目标偏差方位角和脉冲作用对弹丸飞行射程影响来确定点火相位角,根据估算弹道偏量大小来确定脉冲发动机工作级数,可以使修正效果更好。
4结论
本文针对末段修正弹的控制策略问题,根据实时测量的弹体滚转角,建立弹体滚转解耦模型,分析了解耦后探测器上目标成像点轨迹与弹目相对位置关系,给出脉冲修正最佳启控时机和脉冲点火相位角。建立了末段修正弹道模型,并以某型末段修正弹为例进行蒙特卡洛法模拟打靶,仿真结果显示:采用该修正策略能显著减小弹丸落点散布,减小脱靶量,并使CEP减小到14.6m;侧向的修正精度要好于纵向的修正精度;且此方案仅需测弹体滚转角信息,成本低,相对容易实现,具有一定工程实用价值。
参考文献
[1]葛贤坤,黄长强,韩统,等.一种末段修正火箭弹落点精度研究.探测与控制学报,2007,29(1):57-59.
GEXian-kun,HUANGChang-qiang,HANTong,etal.Theimpactpointaccuracystudyofaterminalcorrectionrocket.JournalofDetection&Control,2007,29(1):57-59.(inChinese)
[2]LlUChen-tao,ZHUGuo-quan.Astudyonpulseenginecorrectionstrategyofamortarprojectile//Proceedingsofthe31stChineseControlConference.Hefei:IEEE,2012:2 855-2 858.(inChinese)
[3]姚文进,王晓鸣,李文彬,等.末段修正迫弹脉冲发动机控制策略.探测与控制学报,2008,30(B10):8-10.
YAOWen-jin,WANGXiao-ming,LIWen-bin,etal.Thecontrolstrategyofpulseengineinterminalcorrectionmortar.JournalofDetection&Control,2008,30(B10):8-10.(inChinese)
[4]张成,曹营军,杨树兴.一种低速滚转弹药脉冲发动机弹道修正方法.弹道学报,2008,20(2):45-48.
ZHANGCheng,CAOYing-jun,YANGShu-xing.Trajectorycorrectionschemebasedonpulsejetforlowspeedrollingprojectile.JournalofBallistics,2008,20(2):45-48.(inChinese)
[5]JITPRAPHAIT,BURCHETTBA,COSTELLOM.Comparisonofdifferentguidanceschemesforadirectfirerocketwithapulsejetcontrolmechanism//ProceedingsofAIAAAtmosphericFlightMechanicsConferenceandExhibit.Montreal,Quebec,Canada:AIAA,2001:1-12.
[6]韩子鹏.弹箭外弹道学.北京:北京理工大学出版社,2008.
HANZi-peng.Exteriorballisticsofprojectileandrocket.Beijing:BeijingInstituteofTechnologyPress,2008.(inChinese)
[7]CORRIVEAUD,BERNERC,FLECKV.Trajectorycorrectionusingimpulsethrustersforconventionalartilleryprojectiles//23rdInternationalSymposiumonBallistics.Tarragona,Spain:IBC,2007:639-646.
[8]JITPRAPHAIT,COSTELLOM.Dispersionreductionofadirectfirerocketusinglateralpulsejets.JournalofSpacecraftandRockets,2001,38(6):929-936.
[9]徐劲祥,宋锦武,夏群力.弹道修正弹末段脉冲推力控制研究.弹道学报,2005,17(2):19-23.
XUJin-xiang,SONGJin-wu,XIAQun-li.Astudyonterminalimpulsethrustercontroloftrajectorycorrectionprojectiles.JournalofBallistics,2005,17(2):19-23.(inChinese)
[10] 王浩磊.基于脉冲控制的迫弹末段弹道修正方法研究.南京:南京理工大学,2012.
WANGHao-lei.Studyonterminalcorrectiontrajectorybasedonimpulsecontrol.Nanjing:NanjingUniversityofScience&Technology,2012.(inChinese)
猜你喜欢
汽车实用技术(2022年15期)2022-08-19
舰船科学技术(2022年11期)2022-07-15
能源工程(2022年2期)2022-05-23
现代电力(2022年2期)2022-05-23
食品安全导刊(2021年21期)2021-08-30
建材发展导向(2021年11期)2021-07-28
湖北农机化(2020年4期)2020-07-24
建材发展导向(2019年13期)2019-08-24
建材发展导向(2019年10期)2019-08-24
消费导刊(2018年10期)2018-08-20
