
红外成像导引头目标检测识别共性技术综述
2015-12-31 11:47李伟忠刘明娜
上海航天 2015年1期
李伟忠,刘明娜,姚 勤
(1.中国人民解放军海军驻上海地区航天系统军事代表室,上海 201109;2.上海航天控制技术研究所,上海 201109)
0 引言
红外成像制导是利用目标和背景间的热辐射差,形成目标和周围景物的图像实现自动导引的一种制导方法,目前已广泛用于多种战术武器系统,其核心就是目标检测识别技术。红外自动目标检测识别是当前成像导引头的一项重要技术。
本文对红外成像导引头目标检测识别共性技术进行了综述。
1 红外弱小目标检测技术
红外弱小目标的检测方法直接决定了红外成像系统的探测灵敏度和发现距离,是反映红外低可观测目标识别能力至关重要的一项核心技术[1-3]。由于远距离时目标成像面积小、对比度较低、边缘模糊、无纹理特征、尺寸及形状变化不定,可检测信号相对较弱,特别是在非平稳的复杂起伏背景干扰下,树木、道路、海浪、太阳亮带、亮暗云层等与目标交叠,无法直接从灰度、尺寸和形状区别目标,成像的信噪比较低,使小目标检测变得困难,因此复杂红外场景中小目标的检测是红外成像系统中的关键。目前对红外弱小目标检测的研究主要针对低信噪比、复杂背景条件下提高检测算法的性能及算法的实时性和有效性,研究运算量小、性能高、利于硬件实时实现的检测算法。
小目标检测一般采用空-时滤波算法。时间滤波器置于空间滤波器后的算法为DBT,此类算法先进行空间滤波预处理,对单帧图像实现目标增强和背景抑制,提高图像的信噪比,再用门限检测方法进行目标检测,通过时间序列分析进行时间域滤波,去伪存真,找到真正的目标。时间滤波器在空间滤波器前算法为TBD,这类算法不宣布单帧检测结果,不设检测门限,而是将每帧的信息数字化并存储,在帧与帧间对假设路径包含的点作几乎无信息损失的相关处理,经过多帧积累,在目标轨迹被估计出后,检测结果与目标航迹同时宣布。
1.1 DBT方法
利用先检测后跟踪的方法对红外弱小目标进行检测,需对单帧图像提取候选目标,单帧图像的处理效果在弱小目标检测算法中是关键。单帧红外图像检测方法是根据红外目标与背景的差异,表现为像素的灰度差异特性,一般需在变换域进行检测,常用变换有小波变换、curvelet变换等。小波分析的多尺度特性,适于在低信噪比环境中进行红外目标检测,其伸缩特性可使部分图像特征在某个尺度下被有效抑制,而某些感兴趣的特性可被突显出。因为小波的基函数的间隔可变,能使定位信号间断,当对一幅图像进行二维离散小波变换时,可产生具有不同分辨力和减小了空间的子图,而保持目标和杂波的适当空间位置。小波变换的另一优点是不但能检测一个或两个子带的系数,而且可减少处理的总像素数。
对单帧图像检测还可利用基于背景估计与抑制方法进行,常用的有高通滤波、中值滤波、均值滤波以及自适应背景估计等[4]。这些方法虽能一定程度抑制背景,但仍存在不足:目标不一定是图像中灰度值最高或频率最高的成分,采用自适应门限背景抑制滤波和频率高通滤波时,背景成分泄漏较严重;中值滤波不能处理超过滤波窗口大小的噪声;空间高通滤波需要根据目标形状决定滤波模板,在目标先验知识未知时滤波性能将受影响。
图像处理的一个重要研究领域是形态学滤波,主要包括形态学算子和结构元素选择两个基本内容。在红外弱小目标检测中,目前多数研究采用形态学Top-Hat算子进行检测。以往Top-Hat算子研究中,一般采用单一结构元素处理图像,其滤波器仅在对应某类图像模型中有较好的性能,而图像信号通常极复杂且处于不断变化中,采用单一结构元素形态学处理方法对图像的适应性较差。用单帧图像检测出候选目标再用序列图像确认真实目标,是小目标检测算法中不可或缺的技术。红外成像系统中,图像的帧频较高(一般大于50Hz),在规定时间内能提供一定数量的序列图像进行检测,可提高检测概率并降低虚警概率。
利用序列图像检测目标最直接最简单的方法是管道滤波。管道滤波实际上是一时空滤波器,是在序列图像的空间位置上以目标为中心建立的一个空间管道,管道的直径(如果管道为圆形)代表空间的作用尺寸,管道长度代表检测时间长度。管道滤波是一种较经典时空滤波器,采用时间域和空间域的管道滤波方法时,需预先知道目标的最大运动速度以设置合理的管径。若目标运动过快,则管道滤波器需选粗管径,这样就增加了算法的复杂度。
1.2 TBD方法
跟踪前检测方法要求每获得一帧数据就进行检测,通常一经检测就将未关联上的数据当作杂波点丢掉,丢掉的数据中可能含有目标信息,这种做法难以提高对低可观测目标的检测性能。TBD方法能有效避免此问题,它将多次扫描获得的数据同时处理,增强了低可观测目标的信噪比,且在得到检测结果的同时,可获得目标航迹。TBD方法包括基于动态规划的方法、基于极大似然的方法、基于Hough变换的方法、三维匹配滤波器算法、多级假设检验方法以及高阶相关等算法。这类方法先对图像中较多的可能轨迹同时进行跟踪,用某种判据对每条轨迹的真实性做出软判断,逐步剔除由噪声构成的虚假轨迹,维持真实轨迹,当软判断超过某门限时,做出该轨迹为目标航迹的硬判断,这就避免了因信噪比低而造成的航迹漏检,提高了检测概率。因此,该类算法适于低信噪比时的弱小目标检测,但缺点是实时性差、计算复杂。
2 图像配准技术
红外成像系统应用中,图像传感器常安装在运动平台上,即使是安装在静止平台上,某些干扰也会导致传感器出现抖动,传感器的运动会严重影响目标检测与跟踪算法的性能。因此,在进行成像目标检测前还必须进行图像传感器的运动估计与补偿[6]。成像运动目标的检测方案如图1所示。
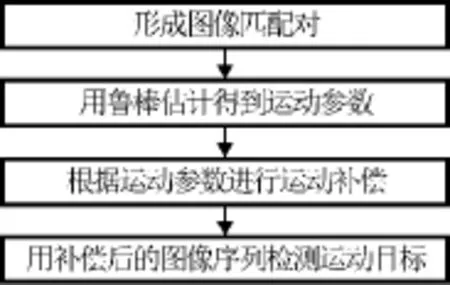
图1 运动目标检测方案Fig.1 Moving target detection
成像运动目标检测中的关键技术有:提取图像特征,进行图像配准获得两帧图像对应的匹配对;对图像传感器的运动选择一种合适的运动模型,根据图像配准结果估计运动参数;利用运动参数对运动模型进行图像补偿;对补偿后的图像序列进行运动目标检测。
2.1 图像匹配分析
传统上大致可分为基于区域的匹配算法和基于特征的匹配算法两大类。前者包括灰度相关算法和相位相关算法等,这类算法中图像的像素点直接参与匹配运算,采用的相似性度量主要是各种互相关系数或图像差,较适于处理大尺度结构特征和区域灰度分布特征不变而细节特征发生畸变的两幅图像。后者先提取图像中的特征,再建立两幅图像间特征的匹配对应关系,其难点是自动、稳定、一致的特征提取和匹配过程消除特征的模糊性与不一致性,较适于处理大尺度结构特征不变而区域灰度特征发生畸变,以及大尺度结构特征发生仿射变换或由图像变化等因素引起的结构特征改变的两幅图像。
在许多场合无法严格区分灰度匹配与特征匹配,如用特征点进行灰度匹配时直接或间接利用了图像的点特征。因而由特征匹配发展了关系匹配,其基本方法是建立一个结构描述与其他结构描述间的对应关系。结构描述定义为一组图像初值(点、线、面)和它们间的对应关系,关系匹配目的是匹配两个或更多的结构描述,其特点是利用了图像的特征,以及拓扑和几何关系,故可在无图像内外定向参数时进行图像匹配。关系匹配的缺点是可能的匹配量大,寻找最佳匹配的计算时间长。
2.2 全局运动估计与补偿分析
经图像匹配获得两帧图像的对应匹配对后,可根据结果估计图像传感器的运动。全局运动估计目的是根据两帧图像的匹配结果求解运动参数模型。摄像机的全局运动一般可用2D变换表示,常用的参数模型有2参数的平动模型、4参数的相似变换模型、6参数的仿射变换模型、8参数的投影变换模型,以及12参数的2次曲面变换模型。参数越多,场景变换就越精确,计算复杂度也越高,一般场景常选取精度和复杂性较适中的仿射变换模型表示全局运动。用图像匹配获得的两帧图像匹配对数远大于求解运动参数模型所需匹配对的最少数量,但视频图像中存在局部运动,所得两帧图像匹配结果中会有一定数量的错误匹配,因此在全局运动估计过程中须消除局部运动的影响。估计算法须有好的鲁棒性,估计本质是一个超定方程组的求解。传统全局运动估计算法常依靠各种迭代算法及改进的快速迭代算法区分全局与局部运动,无法解决迭代特征点的严格要求、运算占用资源大、高频分量丢失、重建噪声较高等问题。M估计算法实质是将估计问题转化为递推重加权最小二乘问题,对估计余差采用不同的加权,可抑制大余差对估计过程的影响,常采用迭代方法求解,初始值常由最小二乘算法估算,对大误差数据有较好的抑制作用,但不能处理完全错误的部分数据。最小中值算法通过最小化余差平方中值求解,理论上失效点数最高可达到50%,当错误点超过50%时,该算法不再适用。FISHIER,BOLLES提出的RANSAC算法对错误率超过50%的数据仍能进行处理,是最有效的鲁棒估计算法之一。
当根据运动估计方法得到摄像机的运动参数后,对序列图像I(x,y,k)中的每个像素点(x,y),由摄像机运动参数模型式计算出该点的运动矢量(dx,dy),可得dx=Xi-xi,dy=Yi-yi。则该点在第k+1帧中的校正坐标为

式中:x0,αx分别x+dx的整数和小数部分;y0,αy分别为y+dy的整数和小数部分。在第k帧图像I(x,y,k)中,灰度值仅在整数位置(x,y)处被定义,而式(1)得到的坐标常为非整数,故用前向映射或后向映射方法解决。前向映射,1个输入像素被映射到4个输出像素间的位置,其灰度值利用插值算法在4个像素间分配;后向映射,输出像素逐个映射回输入图像中,若1个输出像素被映射到4个输入像素间,其灰度要用插值算法由4个输入像素决定。常用的插值算法有最近邻域插值、双线性插值算法和高阶插值算法等。
2.3 运动目标检测
按图像传感器与背景间有无运动,运动目标的检测方法分为静态背景与运动背景两大类[5]。当背景存在运动时,经运动估计与补偿后可转化为静态背景中的运动目标检测。运动目标检测的方法有背景差分法、帧差分法、背景模型法以及基于光流的方法等。
背景差分法用当前帧图像与已知背景图像做差以检测目标,理论上该法最易检测出运动目标,但实际应用中很难获得一幅理想的背景图像。对摄像机固定的场合,获取背景图像的理想方法是在场景中无运动目标时采集一幅背景图像并存储,之后根据外界环境的变化不断更新图像。对摄像机运动的场合,则几乎不能实现。因此,背景差分法常用于视频监控等摄像头相对静止的场合,而不能直接用于背景存在运动的环境中的目标检测。
帧差分法是用当前帧图像与相邻帧图像进行差分以检测目标。该法的优点是对动态背景适应快、计算速度快、占用系统资源少等,缺点有:在目标和背景均存在运动时,直接应用帧差分法无法进行有效的目标检测;当背景变化频率较高时,不能很好地抑制噪声,背景泄漏严重;当背景的某部分移动时,检测结果中会出现“空洞”,一般检测不到移动目标的全部;需选择合适的分割阈值。
背景模型方法是建立一模型以模拟背景图像,并通过比较当前帧图像的像素点值与背景模型确定是目标像素还是背景像素,从而检测到目标。
基于光流的方法根据图像光流场分布的变化检测运动目标,该法能在摄像机存在运动时检测出独立的运动目标,缺点是运算公式复杂,计算量大,实时性差,不适于实时性要求很高的场合。
3 弹道终端目标识别技术
红外成像型导弹弹道终端是目标接近充满成像系统视场至战斗部起爆间的弹道阶段。某些战术导弹的飞行时间较短,且拦截目标图像变化也非常大,弹道终端阶段的自动目标识别算法应具有良好的实时性。另外,除需完成弹道所有阶段应具有的探测、识别、跟踪目标的功能外,导弹自动目标识别系统还应能识别目标的易损(要害)部位,提取飞行剩余时间等弹目相对运动参数,自适应控制炸点,使战斗部在各种弹目交会条件下均能攻击这些易损(要害)部位。
3.1 图像分割
自动目标识别系统识别目标、跟踪目标和炸点控制等均依赖于图像分割结果,图像分割结果的优劣直接影响系统的性能。由于图像种类繁多,复杂程度不同,适合某类图像的分割方法未必适合另一类图像。当图像复杂时,如信噪比低、灰度差异不明显等(其直方图表现为双峰差别很大,甚至单峰),有些分割方法的分割效果就不佳,甚至产生分割错误。目前,还没有对所有测试图像分割效果均为最佳的方法。在分割复杂红外图像时,应根据具体的红外背景和目标类型选择合适的分割方法。
图像分割方法有多种,其中阈值分割法因实现简单,实时性强,成为图像分割中最基本且应用最广的分割算法,但目前还无一通用方法确定最佳阈值。近年来以基于最大熵概念或基于最大类间方差(Otsu法)的阈值选取方法颇受关注,这两类方法也由一维拓展到二维,对图像的灰度信息和像素点间的空间邻域信息均加以考虑,当图像信噪比较低时效果较一维方法有明显改善。二维方法计算量大、运算时间长,故采用混沌粒子群算法优化运行时间,搜索出分割红外图像的最优阈值。基于混沌粒子群优化的Otsu和最大熵红外图像分割方法能根据图像背景与目标面积相差大的特点,自适应搜索到最优阈值,快速有效分割背景起伏、目标特征不明显的红外图像。当图像质量较好和目标存在形态特征时,用Otsu方法分割的目标区域内部均匀,边界形状精确,分割结果更接近实际;最大熵的分割方法可较好地抑制杂波干扰的影响,提取目标信息能力强,更适于目标不具备形态特征及低信噪比红外图像。
3.2 目标要害部位选取
在弹道终端,导引头瞬时视场很小,且由于导弹飞行冲击、振动和摆动而存在抖动,过大的跟踪部位(如发动机尾焰)很容易再次溢出导引头视场,因此局部图像跟踪点的选择须从易于识别和利于缩短跟踪盲区及是否为目标要害部位三方面综合考虑。
对不同种类的目标,相似性和轴对称性是其头部共有的重要特征,且受目标飞行姿态影响小,易于实现快速自动识别和在相邻帧特征点间建立对应,头部圆锥形特征的提取相对目标的尾焰、形心、机翼等特征有更高的识别精度和可实现性,只需通过相应的图像处理方法就可精确地提取其位置。在弹目遭遇过程中,交会速度快且时间极短,目标可视为惯性飞行,目标轴向在弹体坐标系内的空间姿态角保持不变,相邻两帧图像中目标轴向的相关性非常强,局部图像跟踪过程中可利用由形心图像跟踪向局部图像跟踪转换时刻的目标轴向信息逆向搜索灰度突变点,第一个突变点的位置即为该时刻的目标头部位置,跟踪视场中心由形心切换到目标头部位置,实现对目标的局部图像跟踪。
4 红外成像仿真技术
红外目标与背景图像仿真是红外成像仿真中的关键技术,只有获得了目标和背景的红外图像,才能对各种滤波算法、图像增强与补偿算法、特征提取算法及目标状态估计等算法的有效性进行研究。其中产生实时、长时间可用且具有一定通用性的红外图像,是研究的重难点。
红外图像反映的是物体的温度和发射率信息,生成红外图像必须分析物体(包括目标和背景)的红外特性以及大气传输对红外辐射衰减的影响。红外图像的生成涉及红外辐射物理学、传热学、大气辐射物理学、计算机图形学等学科。
4.1 目标红外辐射
确定了温度和发射率,就可确定物体的红外辐射[7]。对飞机、军舰等目标,不同部位的温度各异。飞机的典型部位是蒙皮、喷管、尾焰等,各典型部位间存在传导、对流和辐射换热。目标的温度主要受自身温度和背景辐射的影响,飞机各部位的温度可用两种方法求得。一是用经验数据和经验公式,主要取决于飞机具体型号,不同型号间的差别较大,不同飞行状态的温度差别较大,因未考虑不同温度部位的热传递,该法的精度不高。另一较精确的方法是建立各典型部位间的热传递方程,包括传导、对流和辐射等,工程计算中通常将连续性的微分方程离散化再求解,常用的有差分法和有限元法。物体的发射率取决于其表面材料,对特定的目标,需确定其表面材料,因表面材料常经表面阳极化、涂清漆等处理,某些目标表面采用了红外隐身处理,发射率明显减小。
4.2 背景红外辐射
由于自然条件的影响,不确定性因素过多,背景的辐射相对目标的红外辐射复杂得多。如海洋背景的辐射,在气候变化过程中海面会呈现不同的红外辐射特性,风使海面形成海浪,海浪的斜率及大小直接影响海面的红外发射率和透射率的变化,而这些变化可反映在红外探测器中;空气湿度、大气温度等气象因素影响海上大气红外辐射与衰减,对红外探测器也会产生一定的影响;天空、云层、太阳的红外辐射通过海面的反射也能在探测器中反映出。上述诸因素联合作用确定了海面的红外辐射。
4.3 辐射传输
目前国内大多数研究红外热像生成的文献仅局限在与观察者零距离时的静态热像生成,对战场环境中红外系统探测到的红外热像应考虑大气传输和传感器的影响。红外辐射经大气产生衰减,而大气本身也会产生辐射。目前,公认的大气透过率计算精度较高的是LOWTRAN模型。
生成最终的红外系统探测到的红外热像须对传感器进行模拟。按功能分,红外辐射经光学系统聚焦后进入探测器,探测器将辐射通量转换成电信号,输出的电信号相当微弱,经放大处理最终将电信号转为显示器上的灰度。传感器的模拟同时提供了一种仿真图像的灰度线性量化准则,即确定最高和最小灰度分别对应的辐射,否则无法进行量化。因此,为真正生成红外系统的热图像,须要对传感器进行模拟,才能与红外系统的图像处理算法构成闭合仿真系统。经上述模拟产生的红外热像,可与图像处理单元构成闭合仿真回路,以考查算法的优劣,评估红外成像系统探测跟踪目标的能力。
与外场试验相比,计算机模拟生成热像可节省大量的试验费用,还能产生外场试验无法获取的战场条件,全面测试评估红外成像系统的性能,有极高的价值。
5 结束语
本文对红外凝视成像导引头目标检测识别中的共性技术进行了综述。红外成像导引头目标检测识别是当前智能化信息处理的前沿技术,是提高成像导引头性能的关键。由于战场环境和目标特性复杂多变,不可能找到一种可用于所有场景的通用算法,因此要求有一个算法库以适应条件的改变,导引头能针对性地选用相应算法,以获得最佳效果。
[1] 许 彬,郑 链,王永学,等.红外序列图像小目标检测与跟踪技术综述[J].红外与激光工程,2004,33(5):482-487.
[2] CHE Hong,SUN Long-he.A novel method for plane array infrared image to detect point target[C]//2009Fifth International Conference on Information Assurance and Security.[s.l.]:[s.n.],2009:3373,234-240.
[3] SUN Xie-chang,ZHANG Tian-xu,LI Meng.Moving point target detection using temporal variance filter in IR imagery[C]//Proc SPIE Conference on Signal and Data Processing of Small Targets.[s.l.]:[s.n.],2007:6786,67861Z-1.
[4] 余 农,吴常泳,汤心溢,等.红外目标检测的自适应背景感知算法[J].电子学报,2005,33(2):200-204.
[5] 余 农,吴常泳,汤心溢,等.红外成像自动目标识别技术研究——计算模型与数据流程[J].现代防御技术,2003,31(6):52-59.
[6] 卓志敏.红外成像目标检测与跟踪技术研究[D].哈尔滨:哈尔滨工程大学,2007.
[7] 孙少军,王学伟.红外成像仿真中的若干关键技术研究[J].光学与光电技术,2004,2(3):18-20.
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
环球时报(2022-05-23)2022-05-23
汽车工程师(2021年12期)2022-01-17
金桥(2021年4期)2021-05-21
天津医科大学学报(2021年1期)2021-01-26
当代陕西(2020年14期)2021-01-08
奥秘(创新大赛)(2020年7期)2020-07-27
中国信息技术教育(2020年2期)2020-02-02
电子制作(2019年7期)2019-04-25
电子制作(2019年7期)2019-04-25
