
机械式点阵触觉显示系统
2015-12-30 05:14陈奕钪,刘俊标,李博等
中国机械工程 2015年19期
机械式点阵触觉显示系统
陈奕钪1,2刘俊标1李博1郭少鹏1霍荣岭1
1.中国科学院电工研究所,北京,1001902.中国科学院大学,北京,100049
摘要:设计了一种用于视障人士电子阅读的机械式点阵显示系统。该系统通过小棘爪锁定显示针的不同位置以保持触点的状态,采用Z向驱动器配合XY移动平台顺序控制每个显示针的凸起,而后由复位驱动器统一复位,从而实现系统中多个触点的凸起和平整状态的自动切换。实验结果表明:采用单个Z向驱动器的系统可在1分钟内完成54个触点的凸起和平整状态自动转换。
关键词:盲文显示器;触觉显示;三维显示;小棘爪锁定机构
中图分类号:TP24
收稿日期:2015-01-16
作者简介:陈奕钪,男,1989年生。中国科学院电工研究所、中国科学院大学博士研究生。主要研究方向为机械工程、能源与电工新材料、微量气体检测技术。发表论文2篇。刘俊标(通信作者),男,1974年生。中国科学院电工研究所微纳加工技术与智能电气设备研究部副研究员。李博,女,1987年生。中国科学院电工研究所微纳加工技术与智能电气设备研究部工程师。郭少鹏,男,1974年生。中国科学院电工研究所微纳加工技术与智能电气设备研究部助理研究员。霍荣岭,男,1968年生。中国科学院电工研究所微纳加工技术与智能电气设备研究部工程师。
Tactile Display System of Mechanical Dot Matrix
Chen Yikang1,2Liu Junbiao1Li Bo1Guo Shaopeng1Huo Rongling1
1.Institute of Electrical Engineering,Chinese Academic of Sciences,Beijing,100190
2.University of Chinese Academy of Sciences,Beijing,100049
Abstract:This paper proposed a tactile display system of mechanical dot matrix for the blind’s electronic reading. The statuses of dots were kept by claws latching the different positions of the display pins, and the raise status of display pins were controlled by one Z axis actuator cooperating with XY mobile stage. Then all the display pins would be reset by the reset actuator, so that the statuses of dots might be interchanged automatically. The experimental results show that 54 dots can be automatically interchanged in 1 minute between upward and downward positions by using a Z axis actuator.
Key words: braille display device;tactile display;3D display;latching mechanism with claw
0引言
由于视力的缺失,听觉和触觉是视障人士获取信息的主要来源。已有的电子阅读产品主要是基于视觉设计的,视障人士无法直接使用这些电子产品,需要使用盲文电子书等辅助设备获得信息。
盲文电子书的关键在于触点的状态控制和显示的面积。实现触点的凸起和平整状态自动切换的最直接方法是利用直径为1~2mm、行程为0.5mm左右的直线微驱动器。自20世纪70年代末以来,新型凸点显示设备技术被陆续提出。采用功能材料如磁性材料[1-4]、压电材料[5-7]的显示设备中,功能材料在制作微型致动器时存在制作工艺复杂、成本高、可靠性低等问题。此外,还有采用气动式[8-9]和机械式[10-13]结构的显示设备。在实际应用时,需要大量的触点来表达信息,现有的显示设备的每个触点都需配备一个对应的驱动单元,触点显示的密度受驱动器的体积限制,文献[3]采用层叠的方式来增加触点的密度,增加了其结构的复杂性;同时,驱动单元随着显示面积的扩大而增加,导致显示设备不但体积笨重而且成本剧增。
针对现有问题和实际需求,本文提出了一种方法以尽可能少的直线驱动器来实现触点的密集显示。
1结构设计和功能实现
本文系统的设计思路是将Z向驱动器安装在XY移动平台上,先由XY移动平台找寻触点位置,而后由Z向驱动器驱动显示针凸起,并保持其位置,使触点处于凸起状态;复位驱动器统一复位,使触点处于平整状态。这样一个Z向驱动器能够顺序控制多个显示针的凸起。
1.1单个触点的凸起和平整的实现
根据上述思路,触点处于凸起或平整状态时需要一种机械结构能够保持或锁定,为此设计了小棘爪和显示针,如图1所示。显示针的中间位置有2个台阶轴(上台阶轴和下台阶轴);当小棘爪的头部顶在显示针的上台阶轴下端时,显示针与基准面平,对应于触点的平整状态,如图1a所示;当小棘爪的头部顶在显示针的下台阶轴下端时,显示针高于基准面,对应于触点的凸起状态,如图1d所示。
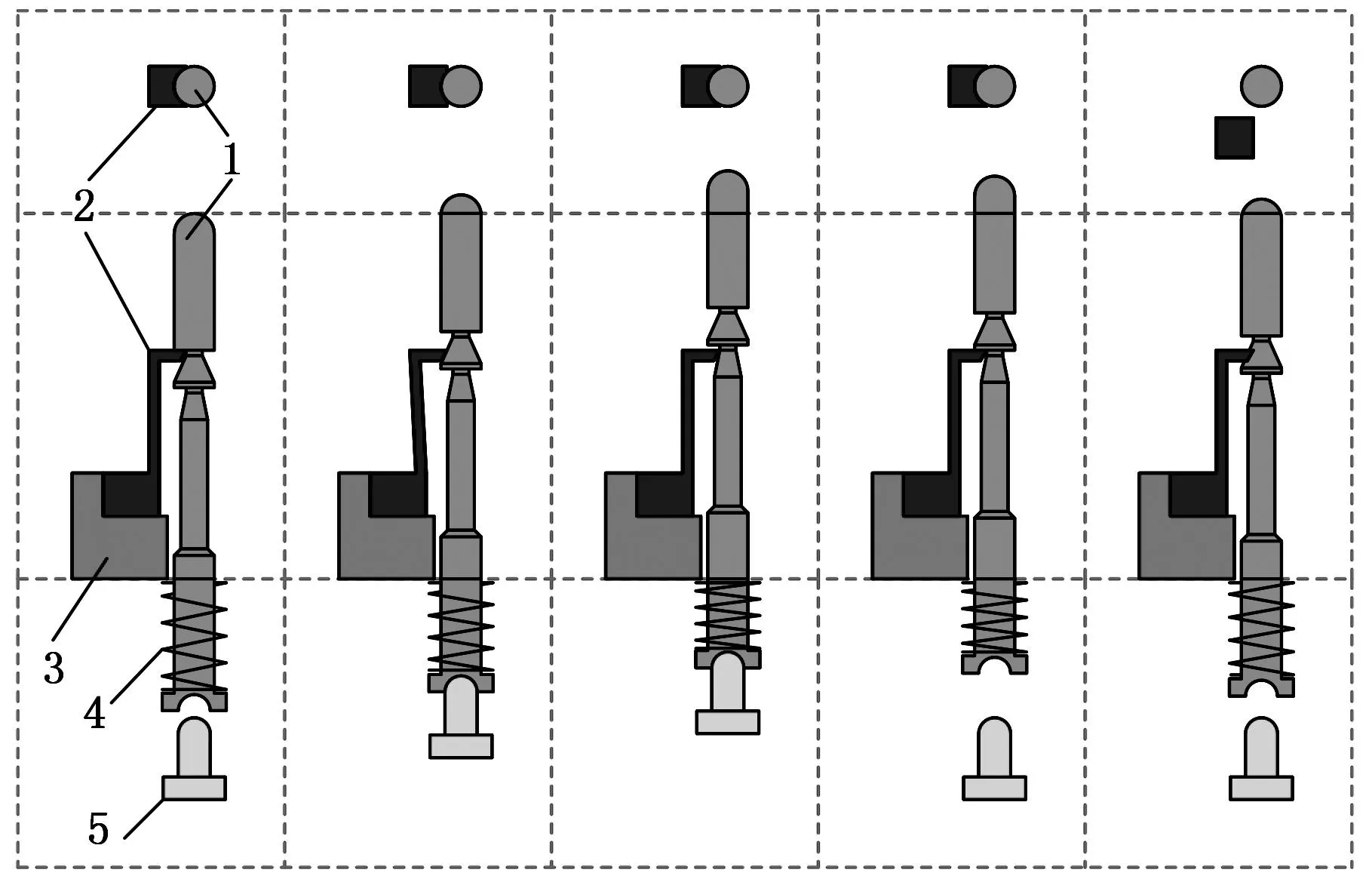
(a)触点 (b)触点 (c)触点位 (d)触点 (e)触点 平整状态 上升中 于最高点 凸起状态 回落中 1.显示针 2.小棘爪 3.基座 4.复位弹簧 5.Z轴驱动器 图1 显示针和小棘爪的结构示意图和配合状态
通常,触点状态的自动切换需要考虑触点的初始状态,有两种形式:
(1)当触点的初始状态为平整时,触点状态由平整向凸起状态转换的过程如下:小棘爪的头部位于显示针的上台阶轴下端,如图1a所示;使Z向驱动器达到显示针位置下方后,Z向驱动器驱动显示针上移,如图1b所示;由于小棘爪具有一定弹性,在显示针上移的过程中,小棘爪的头部会相对滑到显示针的下台阶轴下端,如图1c所示;随着Z向驱动器的复位,显示针也会在复位弹簧的作用下稍有回落,当显示针的下台阶轴下端与小棘爪的头部接触后,显示针被小棘爪支撑,不再继续回落,此时触点处于凸起状态,如图1d所示。
(2)当触点初始状态为凸起时,触点状态由凸起向平整转换的过程如下:小棘爪的头部位于显示针的下台阶轴下端;复位驱动器推动小棘爪横向移动,直至小棘爪与显示针前后错开。此时,显示针失去了小棘爪的支撑,在复位弹簧或者重力的作用下会立即回落,见图1e。回落过程结束后,触点恢复到平整状态。
1.2触点凸起过程受力分析及驱动条件

(1)
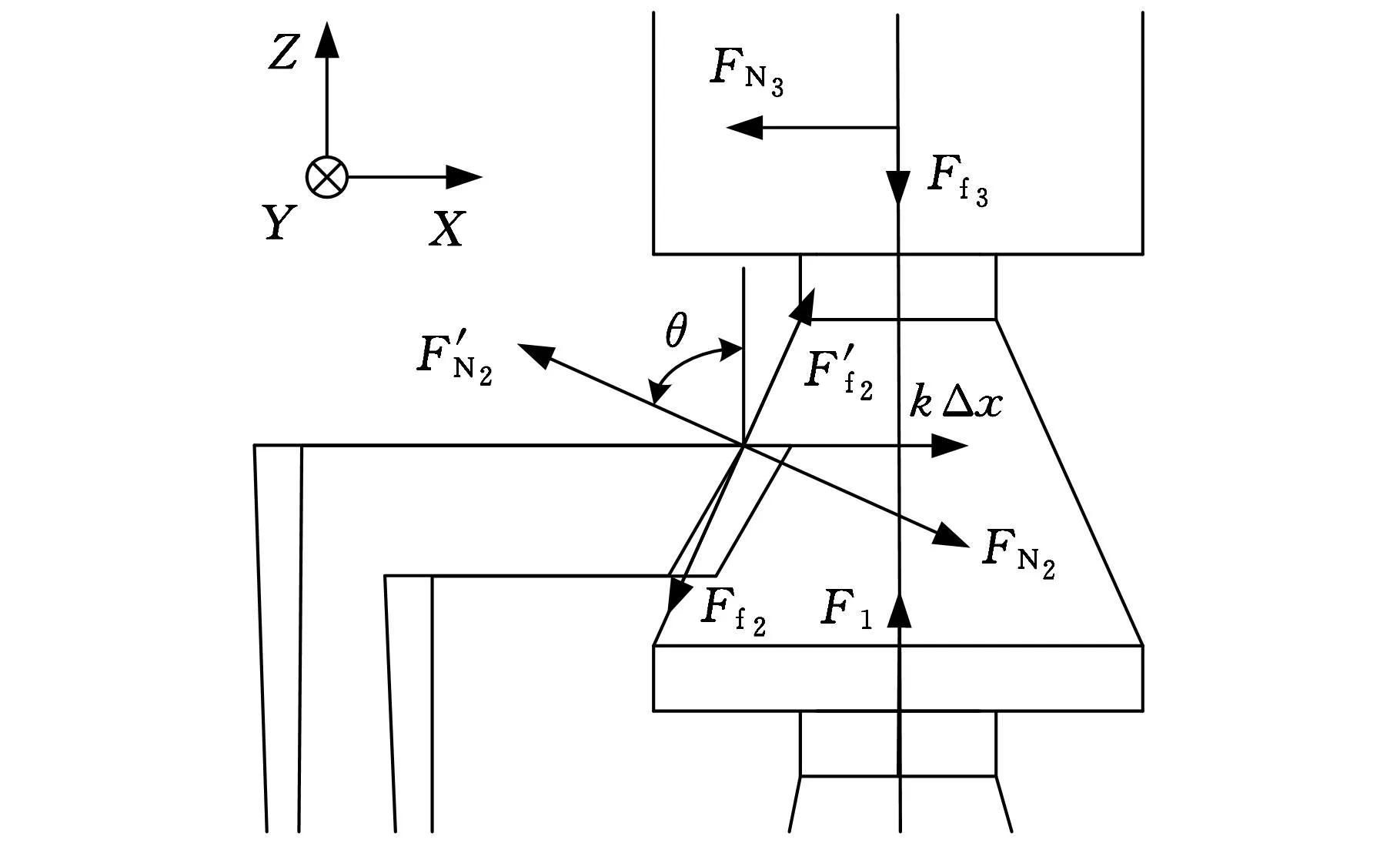
图2 凸起过程受力分析
(2)
将式(1)代入式(2),令Ff2=μ2FN2,Ff3=μ3FN3,其中,μ2、μ3分别为对应的摩擦因数,整理可得
F1=FN2(cosθ+μ2sinθ)+μ3(FN3+kxΔx)+kΔz
(3)
其中,Δz是根据盲文标准来确定的,驱动力F1的最大值由驱动电机决定。可以通过调节μ2、μ3、kx、k、Δx等参数,满足驱动条件。
1.3具有54个触点的触点凸起和平整单元设计
基于上述方法,设计了54个触点的状态自动切换结构。触点间距排列间距参考盲文标准规定,有9方,每方6个点,共有54个触点。图3所示为触点凸起和平整单元。

1.面板 2.显示针 3.旁边小棘爪 4.中间小棘爪 5.机架 6.小棘爪基座 7.底板 8.复位弹簧 9.复位驱动器 图3 触点凸起和平整单元
54个显示针对应于54个触点,显示针安装在单元的中间位置;中间小棘爪有两排,呈背靠背形式;旁边小棘爪只有一排;小棘爪的数量和显示针的数量相同。为保持所有显示针的显示高度相等,在显示针的下端部安装有底板。面板与底板通过框架来连接固定,小棘爪基座安装在框架内部,可在底板上面前后运动。复位驱动器安装在小棘爪基座的后端,与小棘爪基座固定连接,用来移动小棘爪基座,控制小棘爪的头部与显示针的接触位置,以锁定或保持显示针的凸起和平整状态。
1.4系统设计和实现
如图4所示,机械式点阵显示系统主要包括计算机控制子系统、运动控制器和点阵凸点显示子系统。运动控制器包括XY移动平台控制器、Z向驱动器的控制器和复位驱动器的控制器。点阵凸点显示子系统的运动包括XY移动平台的运动、Z向运动和复位运动。触点凸起和平整锁定单元固定在机架上;Z轴驱动器固定在多维移动平台上,可以跟随多维移动平台进行X、Y方向的移动。计算机根据需要显示的盲文图形,通过串口向运动控制器发送命令;运动控制器接收到指令后,输出驱动器的功率信号;驱动器驱动点阵凸点显示子系统进行需要的运动,完成了触点凸起和平整信息的表达,显示盲文图形。
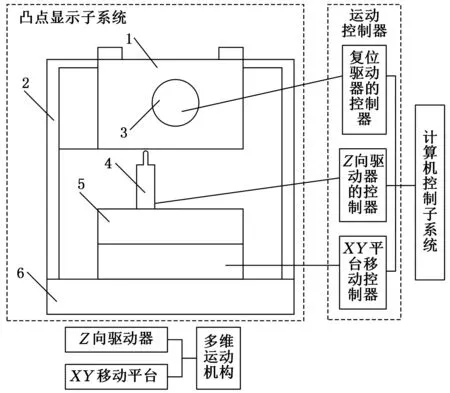
1.触点凸起和平整单元 2.机架 3.复位驱动器 4.Z向驱动器 5.XY移动平台 6.基座 图4 点阵显示系统的结构示意图
1.5工作流程图
定义了2套工作坐标系:XY平台的坐标系XY和显示面板坐标系xy。将XY运动平台限位开关的位置定义为坐标系XY的原点(X0,Y0),以远离限位开关的方向为坐标系的正方向,以基座的平面为基准面;定义离坐标系XY原点最近的一个显示针的位置为坐标系xy的原点(x0,y0),以面板的平面为基准面,其正方向与坐标系XY的正方向相同;两个坐标系的偏移位置为(x0- X0,y0- Y0)。系统显示盲文图形的工作流程如图5所示,其具体步骤描述如下:
(1)系统初始化。移动 XY移动平台至限位开关的位置,即XY坐标系的原点。
(2)系统参数设置与数据解析。系统参数设置是指,用户通过人机界面,输入(X0,Y0)和(x0,y0)、显示针数目与显示针间隔等参数。数据解析是指,用户输入图片数据给计算机,计算机控制子系统将其解析为与显示针阵列一一对应的二维点阵数据。每支显示针的凸起对应于点阵数据的1,平整状态对应于点阵数据的0。
(3)寻找显示平面的原点。运动控制器根据接收到的原点位置数据,首先移动XY平台,使Z向驱动器到xy坐标系的原点(x0,y0)。
(4)读取该行数据并驱动对应的显示针。Z向驱动器按照预先设置的显示针间隔在X方向做逐点扫描。当扫描到数据为1的点时,Z向驱动器执行动作使显示针凸起。
(5)判断是否已经扫描了全部的显示针。如果是则进入下一个步骤,如果否,则移动Z向驱动器,对下一行显示针进行扫描。
(6)判断是否需要显示更多的盲文图形。如果是,则在设定的时间间隔后,驱动复位驱动器使所有显示针回到平整状态,然后从第一个步骤重新开始循环;若果否,则显示流程结束。
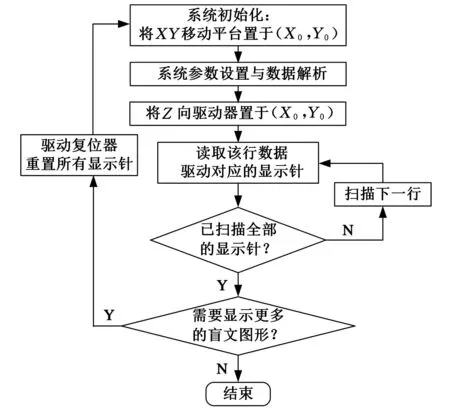
图5 系统显示盲文图形的工作流程图
2原理样机及测试
为了证明该机械式点阵系统原理和所显示数据的可读性。我们设计了一个3×3的盲文显示单元的原理样机。该原理样机包括硬件系统和软件控制系统。硬件系统如图5所示,由一台PC机、控制器、XYZ多维运动机构、机架以及包含有3×3的显示单元组成。软件系统由控制界面、数据处理系统、控制模块组成。
该原理样机的总体结构如图6所示所示,为了测试每个显示针的显示的可靠性,我们采用了全1的点阵数据,即所有的显示针都凸起,点阵数据被打包成控制指令,通过串口传送给控制器,从而控制移动平台移动Z向驱动器,驱动显示针凸起。图7所示为实验中触点显示界面的情况,XY移动平台的速度设置为5mm/s,移动平台按照光栅扫描的方式移动Z轴驱动器进行逐个驱动,完成整个显示屏的显示需要将近1min的时间,每个触点都能实现凸起和平整状态切换。利用该原理样机,对26个英文字母以及10个阿拉伯数字的单字显示进行测试,每个字重复显示100次。显示成功率达100%。通过提高移动平台的移动速度及Z轴驱动器的响应速度可以有效地缩短显示时间。

1.计算机控制系统 2.触点凸起 3.机架 4.堆座 5.Z轴驱动器 6.多维运动机构 图6 显示器总体结构图

图7 盲文显示器显示界面
3结语
本文提出的盲文显示器采用电磁力为触点的驱动力,通过XY移动平台寻址,由Z向驱动器来驱动显示针凸起,多个显示针共用一个驱动器,触点与驱动器不再一一对应,触点的密度不再受驱动器的体积限制;同时,可以通过增大XY移动平台的行程扩大显示面积,通过增加多个并行工作的Z向驱动器提高显示速度。
参考文献:
[1]Bareau A. Arrangement for Converting Digital Signals Representing Characters into a Self-locking Dot Representation:U.S.,4194190[P]. 1980-03-18.
[2]Petersen R C. Tactile Display Apparatus:U.S., 4871992. 3[P]. 1989-10-03.
[3]Shinohara M, Shimizu Y, Mochizuki A. Three-dimensional Tactile Display for the Blind[J]. IEEE Transactions on Rehabilitation Engineering,1998,6(3):249-256.
[4]Sriskanthan N, Subramanian K R. Braille Display Terminal for Personal Computers[J]. IEEE Transactions on Consumer Electronics,1990,36(2): 121-128.
[5]Tetzlaff J F. Electromechanical Braille Cell:U.S.,4283178[P]. 1981-08-11.
[6]Tieman F J, Zeehuisen K. Tactile Relief Display Device and Method for Manufacture It:U.S.,4758165[P]. 1988-07-19.
[7]Fernando L X, Runyan N H. Electromechanical Braille Cell and Method of Operating Same:U.S., 4473356[P]. 1984-09-25.
[8]Sutherland N B. Braille Display Device:U.S.,3659354[P]. 1972-05-02.
[9]Moy G, Wagner C, Fearing R S. A Compliant Tactile Display for Teletaction[C]//2000 IEEE International Conference on Robotics and Automation. San Francisco,2000:3409-3415.
[10]Tretiakoff O, Tretiakoff A. Single Dot Tactile Reading Module Driven by a Shape Memory Wire:U.S., 6893263[P]. 2005-05-17.
[11]Taylor P M, Moser A, Creed A. A Sixty-four Element Tactile Display Using Shape Memory Alloy Wires[J]. Displays, 1998, 18(3): 163-168.
[12]Wu X, Kim S H, Zhu H, et al. A Refreshable Braille Cell Based on Pneumatic Microbubble Actuators[J]. Journal of Microelectromechanical Systems,2012,21(4):908-916.
[13]Matsunaga T, Totsu K, Esashi M, et al. Tactile Display Using Shape Memory Alloy Micro-coil Actuator and Magnetic Latch Mechanism[J]. Displays, 2013, 34(2): 89-94.
(编辑张洋)
