北狮“高台180°飞跃直接站腿”腾空阶段狮尾动作分析
2015-12-30 01:01:09沈玉梅,张枝尚
广州体育学院学报 2015年5期
北狮“高台180°飞跃直接站腿”腾空阶段狮尾动作分析
沈玉梅1,张枝尚2
(1. 东莞职业技术学院体育系,广东 东莞523808;2.广东医学院体育教学部,广东 东莞523808)
摘要:采用三维定点高速摄像机对北狮“高台180°飞跃直接站腿”动作进行200帧/s频率的拍摄。首先,用视讯系统进行分段解析,得出腾空阶段中狮尾不同环节、不同时间的三维空间数据;然后,对数据应用Q-TOOLS、EXCEL等软件进行解析、计算;最后,根据计算结果分析狮尾在腾空阶段运动的运动学特征。
关键词:北狮运动;腾空阶段;提拉;转动惯量;运动学
中图分类号:G852
收稿日期:2015-07-10
作者简介:沈玉梅(1984-),女,讲师,硕士研究生

研究方向:体育教育训练学
Analysis on “High-Direct Station 180 ° Leap Legs”
Of The Northern Lion and Lion-Tailed Motion
ZHANG Zhi-shang1, SHEN Yu-mei2
(1. Dongguan vocational and technical college, Dongguan 523808,China;
2. Guangdong Medical College, Dongguan 523808,China)
Abstract:This paper uses three fixed speed camera on the North Lions' high-direct station 180 ° leap legs "operation of 200 / s shooting frequency. First, the video system segmented resolution, drawn vacated stage lion-tailed different segments, three-dimensional spatial data at different times; then applied to the data Q-TOOLS, EXCEL and other software for analysis, calculation; Finally, according to the results analysis Kinetic characteristics of the lion tail in the campaign.
Key words:Northern Lion sports; vacated stage; pulling; inertia; kinematics
我国的“狮”文化有着几千年的传统,舞狮运动也有几千年的发展历史,舞狮运动分为北狮和南狮两大类。腾空动作是北狮难度动作的重要组成部分,在表演、比赛中都占有重要地位,而狮尾在腾空动作过程中具有支持作用,是腾空动作能够顺利完成的关键。本研究通过对北狮“高台左右180°飞跃直接站腿”腾空阶段狮尾动作进行运动学的分析,通过分析得出狮尾在腾空动作完成过程中的运动学特征。
1研究对象与方法
1.1研究对象
2009年亚洲龙狮锦标赛冠军队队员
1.2实验法
(1)实验设计
实验名称:北狮难度动作的三维摄像
实验对象:亚洲锦标赛冠军队队员(一组两人,狮头+狮尾)如表1。
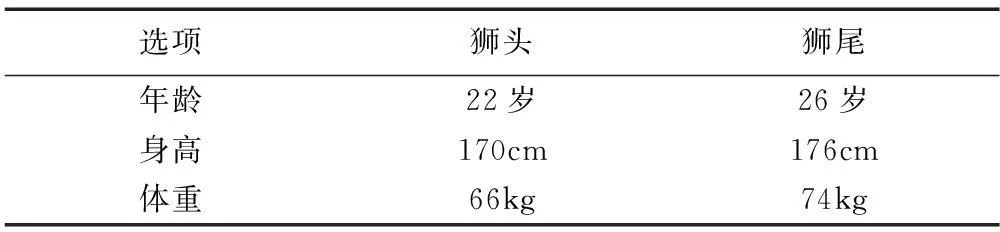
表1 实验对象基本情况统计

表2 实验对象动作完成情况统计
实验设施:两台高速摄像机;图像提取、分析软件;空间标定框架
测试对象:北狮高台左右180°飞跃直接站腿
动作描述:腾空阶段狮头双脚离开台面瞬间到再次接触台面或地面瞬间之前的部分,为了更好的研究动作,本文将腾空阶段细分为提拉部分、旋转部分和下落部分。每部分在文中都有详细说明,本单元就不做赘述。
数据采集:用MVC高速摄像机以每秒200帧拍摄。两台摄像机放在同一水平面内,主光轴夹角为90°。采集运动员6次难度动作完成并成功的数据。如表2
数据处理:首先,对所获取的视频资料进行筛选,从中选取动作较为标准的一次视频,然后,利用视讯视频分析软件对视频数据进行处理,按照扎齐奥尔斯基模型对实验对象全身23个点进行标定,采集数据。最后,获取的数据经过Q-tools软件和Excel进行数据统计分析,计算时间、位移、速度、角度等参数。
运动轴设定:按狮头准备姿势时的解剖学位置为准:冠状轴设定为X轴,狮头运动员右手方向为正方向;垂直轴设定为Y轴,狮头运动员头顶方向为正方向;矢状轴设定为Z轴,狮头运动员面对方向为正方向。如图1
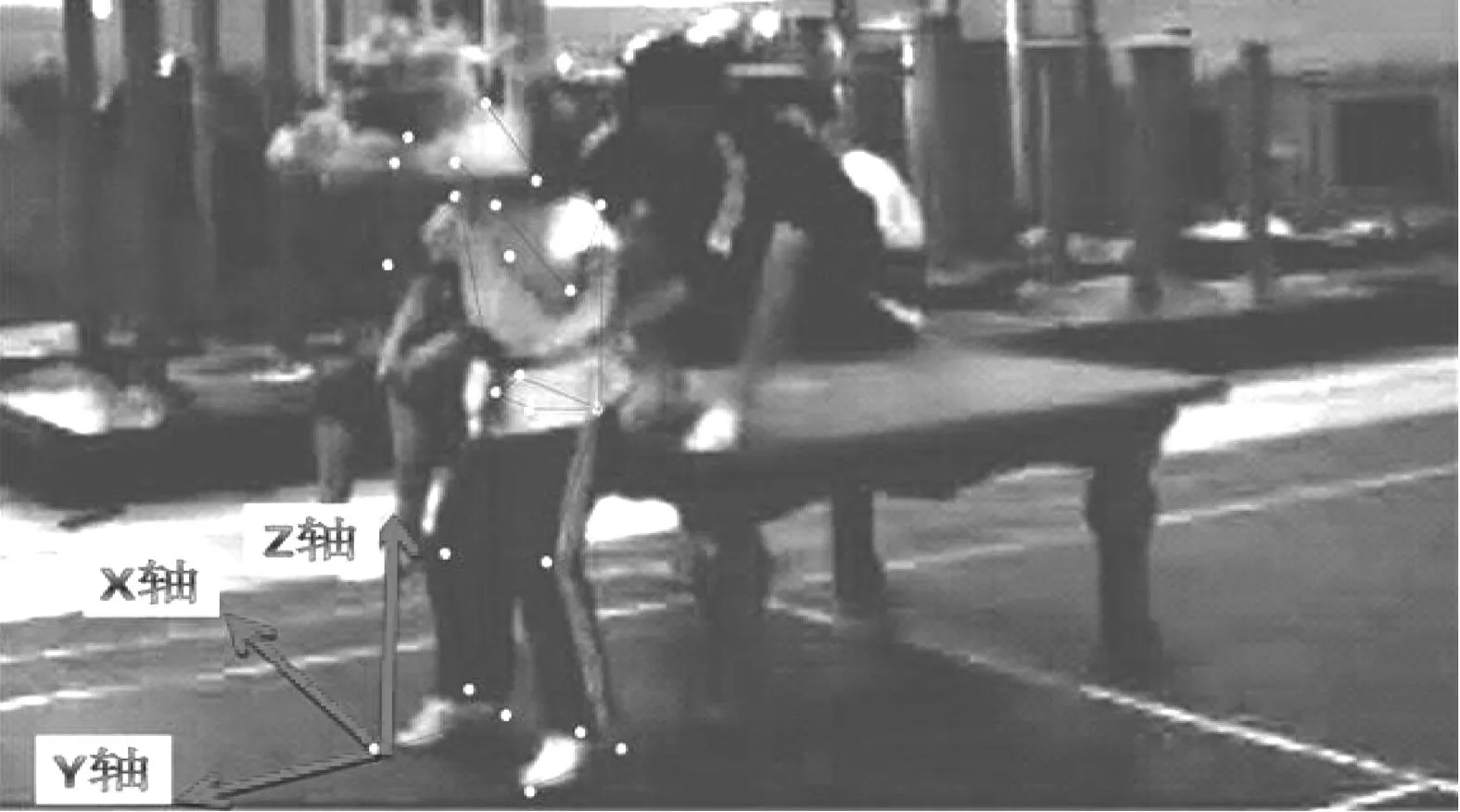
图1 坐标轴设定与节点位置示意
(2)测量参数
位移:18个标准节点
位置与时间的特点:狮头重心,狮尾重心,四肢各关节
速度:各环节关节中心点,重心
定性分析关键:转动惯量、动力学、静力学、运动学
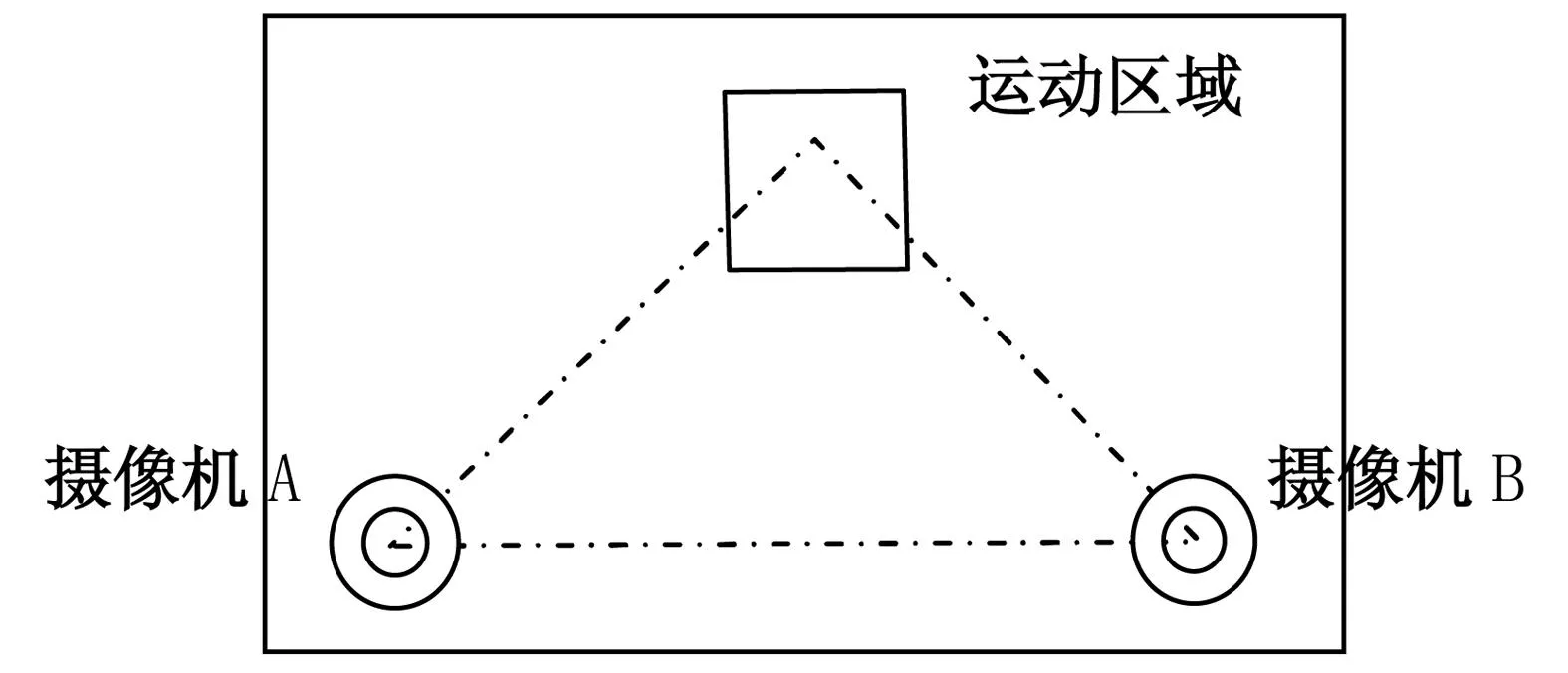
图2 摄像机安放位置示意
2实验结果与分析
2.1提拉阶段狮头狮尾运动员重心动作分析
提拉阶段是从狮头起跳离开地面到旋转之前的阶段,时间为0.085s。狮头起跳完成双脚离地后身体处与地面不接触不受地面的支持力的作用,狮尾的支撑是保持和控制狮头动作姿势的关键。狮尾是支点,为狮头提供动力。狮尾将狮头从地面拉起至胸前,狮头狮尾运动员重心距离减小,从视频上看到狮尾和狮头运动员产生了相对位移。
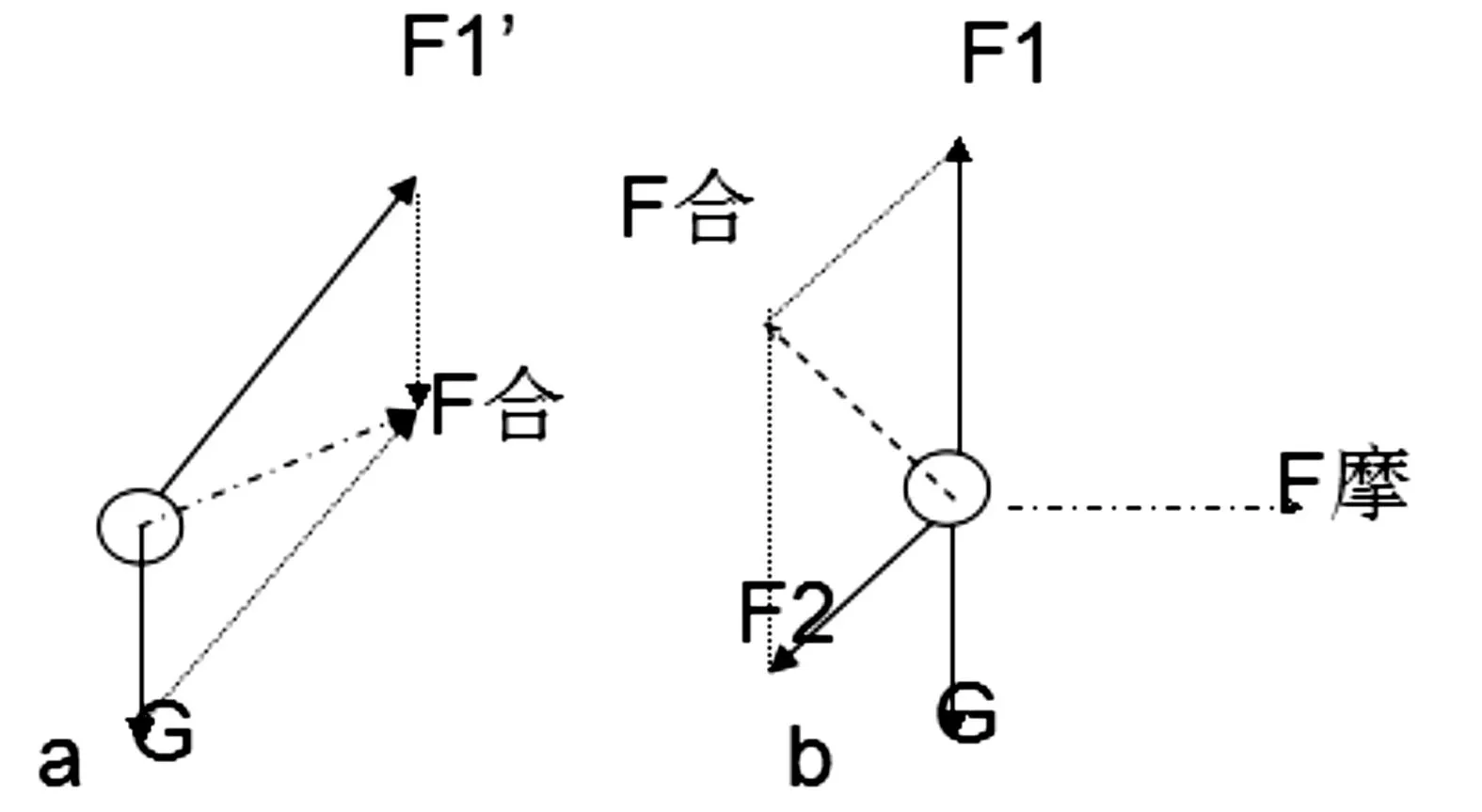
图3 狮头(a)狮尾(b)提拉阶段受力分析
如图3所示,狮头双脚离地后身体处于悬空状态,此时地面对狮头的支持力消失,地面给予狮头运动员的向上加速度也消失,垂直方向只受到重力a-G。在提拉阶段狮尾运动员在狮头运动员起跳后顺势将其拉起至胸前,此时,狮头运动员还受到狮尾运动员斜向上的拉力a-F1,,即:狮头运动员在提拉阶段所受合力a-F合 是重力和拉力的作用。从图3中可以看出狮头运动员所受合力方向是斜向上的,根据牛顿第二定律可知狮头运动员在斜向上有加速度,根据加速度的矢量性特征可以知道狮头运动员在提拉阶段有水平方向和垂直方向分加速度。根据牛顿第三定律知道力与力是相互的,狮头运动员受到狮尾运动员拉力作用的同时也会给狮尾运动员反作用力,这个力表现为拉力的作用,既狮尾运动员受到狮头运动员的拉力作用,(见图3 b-F2)。另外,狮尾运动员受到重力(图3 b-G)作用,同时因为狮尾运动员双脚未离开台面,因此也受到地面给他的支持力(图3 b-F1)。从图3中可以看到狮尾运动员受到垂直向上的支持力作用,斜向下的拉力作用和垂直向下的重力作用,运用牛顿基本定律可知狮尾运动员还受地面的摩擦力作用见图3 b-F摩。即狮尾所受合力方向是斜向上的。
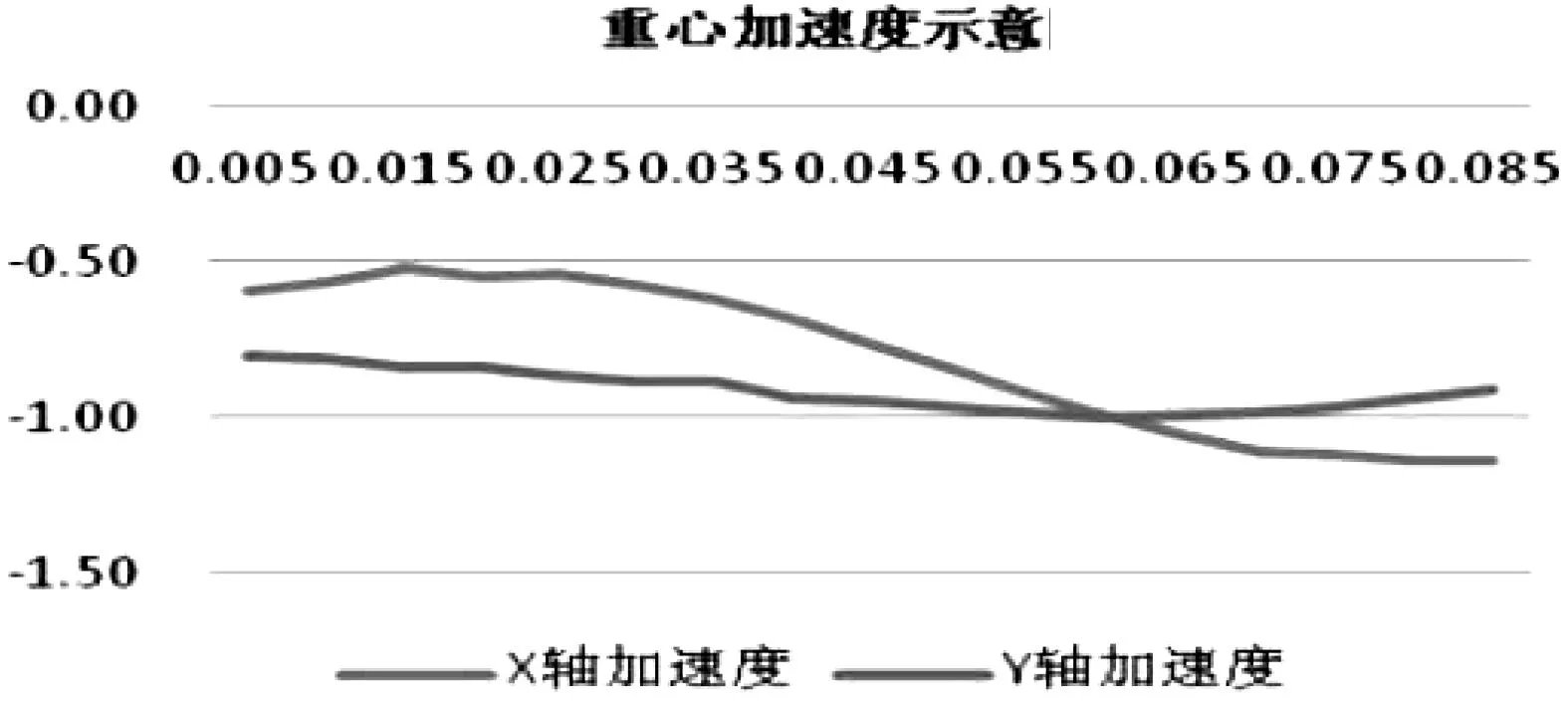
图4 提拉阶段狮尾运动员重心在X、Y轴加速度示意
从图4中可以清晰的看到在提拉阶段狮尾运动员重心在X、Y轴的加速度方向在水平轴以下,说明在提拉阶段狮尾运动员重心加速度方向是反向的,即向着狮头运动员的方向与狮头运动员运动方向是相反的。从数据来看狮尾运动员提拉阶段在X轴的加速度绝对值变化较大|0.5-1.15|,而在Y轴加速度的绝对值变化较小|0.8-1.0|,这说明狮尾运动员在X轴(狮头运动员初始位置的左右方向)的速度变化比Y轴(狮头运动员初始位置的前后方向)大。
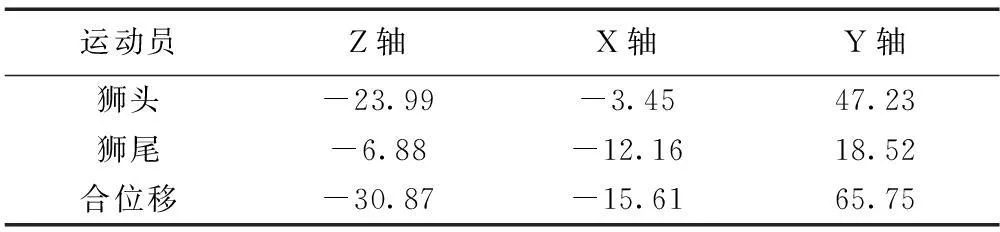
表3 狮头、狮尾重心在提起阶段不同方向位移统计 (单位:m“-”表示方向)
从表3中可以知道提拉阶段狮头在Z轴、X轴、Y轴的位移分别为:-23.99cm、-3.45cm、47.23cm,而狮尾在相应轴上的位移为:-6.88cm、-12.16cm、18.52cm。从数据来看狮头、狮尾运动员在各个方向上的位移方向一致,说明运动员的运动方向一致;狮头运动员在Z轴和Y轴上的位移远远大于狮尾运动员;狮头运动员在X轴上的位移却小于狮尾运动员,这说明狮头、狮尾运动员在Z轴和Y轴上的距离变小,而在水平方向的距离变大,即狮尾运动员在提拉阶段将狮头运动员提向自己胸前,而自己身体则向左有较大位移。单独看狮头运动员,其在Z轴、Y轴上的位移远远大于X轴上的位移,这说明提拉阶段狮头运动员主要产生向上向后的位移,并在这两个方向与狮尾运动员的距离变小。单独看狮尾运动员,其在三个方向的位移差较狮头运动员小,在X轴、Y轴上的位移大于在Z轴上的位移,说明狮尾运动员在提拉阶段身体重心主要产生水平向右和失状向后的运动,而在垂直向上的运动较少。对比提拉阶段狮头、狮尾运动员在不同方向的位移可以知道:提拉阶段狮头运动员起跳,狮尾运动员将其向上向后向左(以初始状态狮头运动员方位为标准)提拉,使其向上向后向左运动;同时狮尾运动员自己也向上向后向左运动;狮头运动员向上向后位移大于狮尾运动员,向左位移小于狮尾运动员;狮头狮尾运动员在上下、前后方向的距离变小,而在左右方向的距离变大。这主要是因为在腾空开始狮头与狮尾运动员在垂直方向和失状方向距离较大,只有减小两者之间的距离才能使两者的转动惯量(转动惯量:“m”不变,“r”越小,j越小)变小,转动惯量越小,那么运动员旋转时的离心力就会变小,旋转时运动员就更省力;狮头与狮尾运动员在水平面上同时旋转,根据动量守恒定律狮头运动员与狮尾运动员在左右方向的相对位移可以缓冲旋转产生的动量,可以保持稳定。
从表4中可以看出狮尾运动员在提拉阶段不同关节点在不同方向上的位移相差较大,最大位移是最小位移的70倍。狮尾运动员躯干和上肢关节中心点位移大于下肢关节;颅顶点位移最大,而右趾尖位移最小;左侧关节中心点位移均大于右侧关节中心点,如左、右腕总位移分别是是52.21cm、46.17cm,左、右膝总位移分别是13.82cm、7.83cm,左、右趾尖总位移分别是13.76cm、0.77cm;耻骨点位移最接近重心位移分别为16.13cm、23.20cm;狮尾各关节自上至下(各关节相对踝关节的距离)位移逐渐变小。狮尾运动员在提拉阶段可以近似看成围绕左侧关节在矢状面上的旋转,这大大减小了狮尾运动员的旋转半径,速度(:F、m不变,r越小,ω越大),转速就大大提高;旋转半径小了,转动惯量就会变小,这样狮尾运动员旋转时所需要克服的阻力作用也会变小,也会更省力;颅顶点位移最大是为了更好地利用身体肌肉的姿势反射,头部的旋转会引起同侧肌肉伸肌紧张性加强,更有利于身体作出旋转动作。
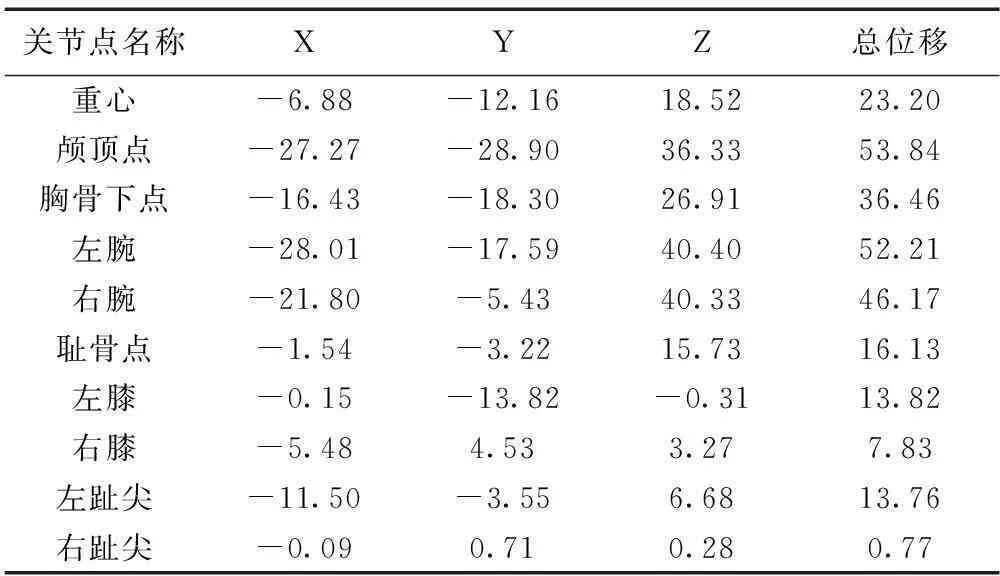
表4 狮尾各关节点不同方向位移统计 (单位:cm)
2.2旋转阶段
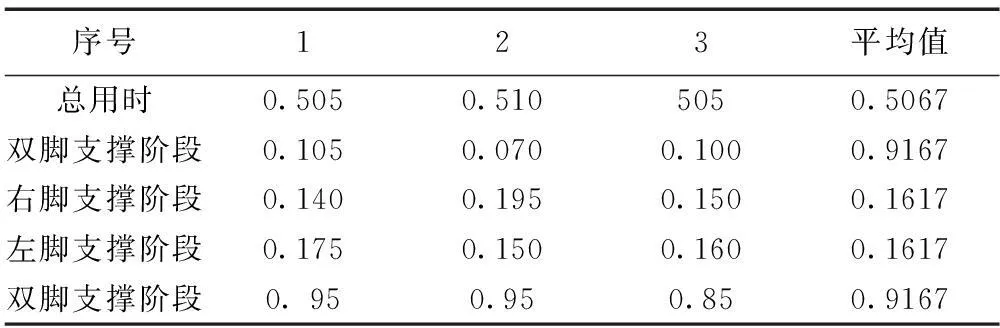
旋转阶段是指狮尾将狮头拉至一定高度同时使狮头由高台左边缘旋转至高台右边缘,重心下落之前的过程,持续时间为0.305 s。在此过程中狮头双脚不着地,处于腾空状态,狮尾由双脚支撑经过单脚支撑跨越高台运动至高台右边,最后变为双脚支撑。
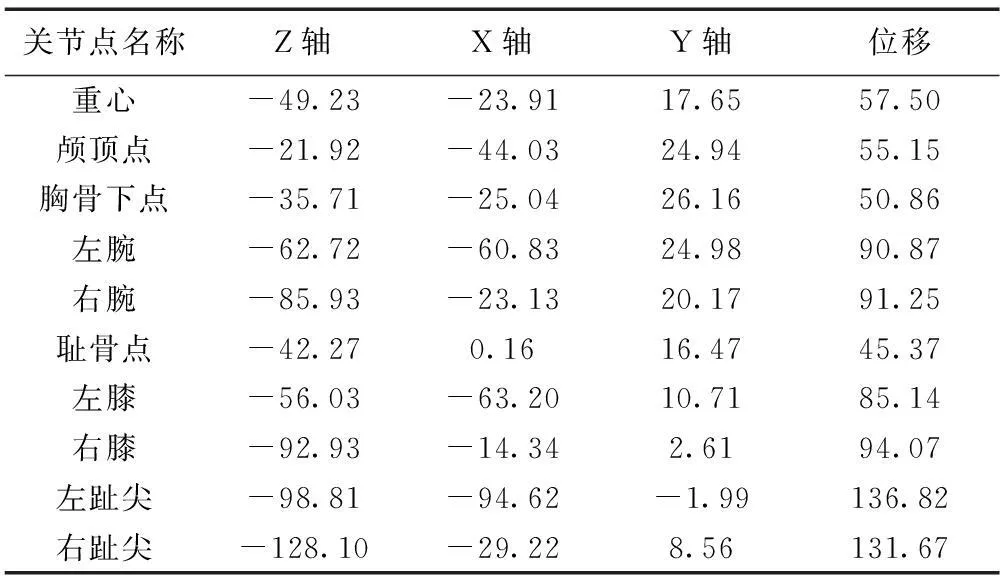
表5 狮尾各关节点不同方向位移统计 (单位:cm)
旋转阶段狮尾空间位置有很大变化,支撑脚也随着时间改变而有所变化。从表5中可以看出狮尾各关节点在Y轴的变化不大,都在30cm以下,可见在旋转过程中狮尾高度变化不大,而是在水平面上的旋转;狮尾腕关节、膝关节、趾尖在X轴的位移较大,这是因为狮尾在旋转过程中方向改变,产生了对角的位移;在Z轴的位移都较大,是因为旋转的起点与终点之间距离较大,即狮尾与狮头从高台的左边到高台的右边。
狮头、狮尾在旋转过程中是以同样的速度围绕高台做与水平面有一定夹角的旋转,因此在旋转过程中存在狮头、狮尾的自转和围绕高台的旋转。根据转动定律,可以知道若想获得较快的角加速度则有两种途径,一是:增加肌力矩,二是:较小旋转环节的转动惯量。力矩是肌力与肌力臂的乘积,所以想增加肌力矩可以通过增加肌肉力量和增加肌肉收缩长度。根据转动惯量公式可以知道环节的质量和半径都影响环节的转动惯量,减少环节质量,减小环节的旋转半径都可以减小转动惯量。在旋转过程中狮头与狮尾的质量是固定的,因此只能通过减小转动半径来减小转动惯量,增加角加速度。从图5中可以看出狮尾腕关节(与狮头接触)与胸骨下点(躯干的体表标志点)的距离在开始先是逐渐变小,当达到最小值17.8cm(0.21s)时逐渐开始变大。狮尾与狮头的距离越小,就能获得越大的角加速度。
狮尾在旋转过程中有支撑脚的变化。左脚先动越过高台从高台左边外侧移动到高台右边内测,左脚落地后,右脚开始移动,右脚开始移动时狮头狮尾重心向左脚移动,地面对狮尾的支持力由右脚过渡到了左脚,知道双脚着地。从视频资料中可以清晰的看到左脚移动落地时脚跟先着地,后过渡到脚尖,这样可以起到良好的缓冲作用,狮尾脚落地时产生的冲击力大于狮头与狮尾两个人的重力,因为落地瞬间是瞬间的超重现象。狮尾采用脚跟先着地,过渡到脚尖可以改变教育地面接触瞬间冲击力的方向,减少Y方向的力,保护狮尾踝、膝宽关节。
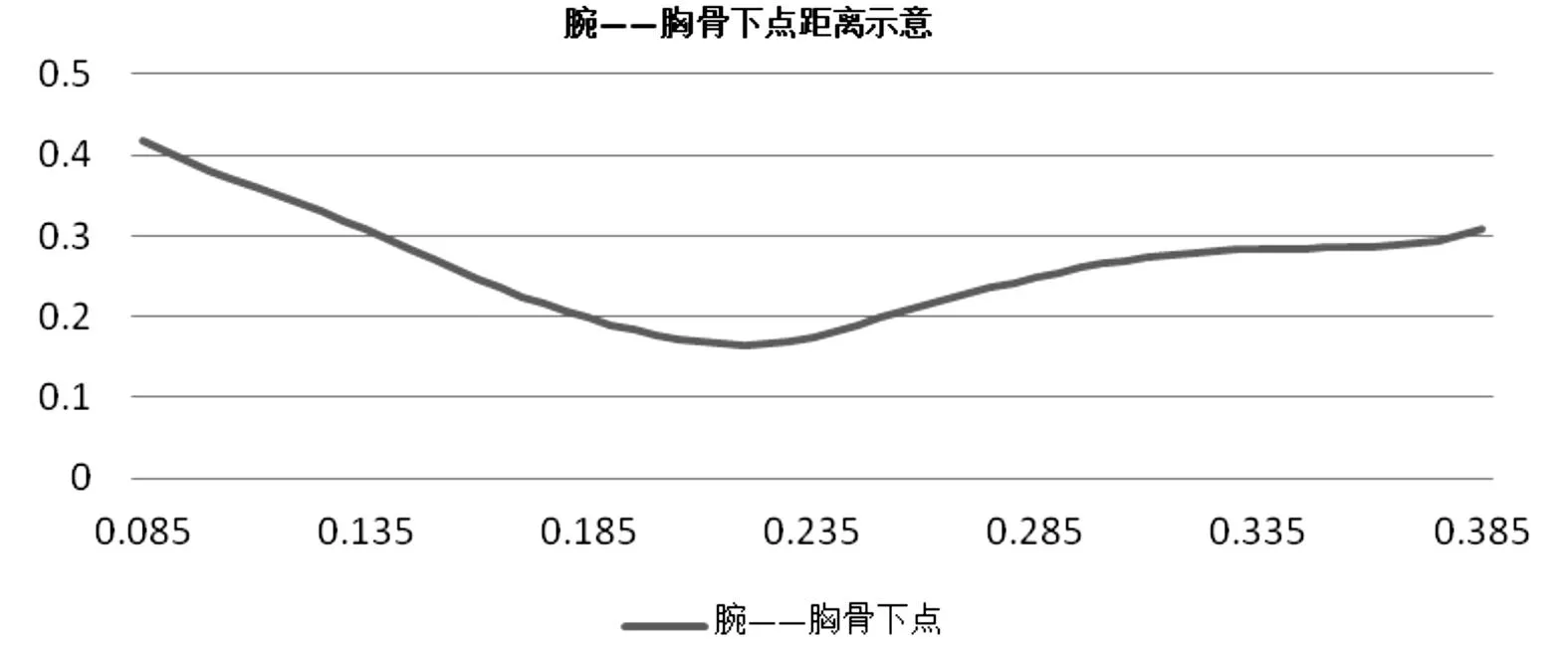
图5 狮尾腕关节胸骨下点距离示意
(整个腾空阶段 单位:s)
根据动量矩守恒原理:在不受外力情况下人体总动量矩的大小和方向均守恒,动量矩在不同环节之间可以转换,当身体的某一环节制动时,会将动量矩转移到其他环节。狮尾在旋转过程中通过减小与狮头间的距离,减小转动惯量;减小自身的转动速度使狮头的动量矩变大,速度加快,保证腾空时间,完成动作。
2.3落地阶段
落地阶段是指狮头从高台右边缘开始下落到地面的过程。首先运动员重心有明显的高度下降趋势,从图6中可以看出狮尾重心高度变化呈现线性特征,曲线斜率为k=2.6303,说明狮尾在此阶段的下落趋于匀速运动。
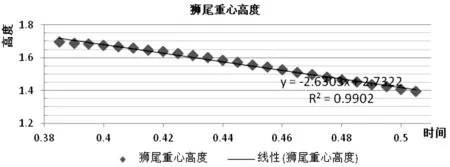
图6 狮尾重心高度变化示意
从图7数据可以看出从高台右边缘开始下落时狮头狮尾随时间变化两者之间的距离逐渐变大,两者的旋转半径变大,转动惯量变大;此阶段的旋转狮尾足部没有变化(见图8狮尾趾尖高度变化示意图),两者的旋转是以狮尾重心的Y轴为中心轴的,狮尾的旋转角度较小,狮尾不同环节在Z轴的位移方向不同,这样狮尾自身的旋转惯量保持不变或变大;从视频上看到狮头在此阶段身体伸展,也增加了转动惯量;从狮尾肘关节角度来看(见图9狮尾肘关节角度变化示意图),狮尾在此阶段与狮头距离很大,这样增大了两者转动惯量,减小狮头运动的速度,减小了速度。这样狮头能够在下落过程中保持速度的稳定,增加了落地瞬间的时间,得到了良好的缓冲。
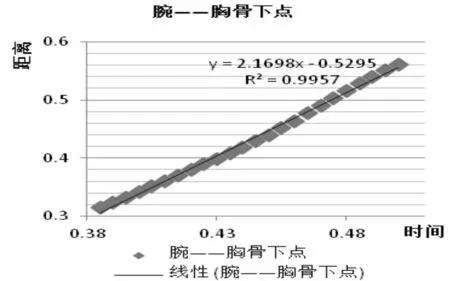
图7 狮尾腕关节与胸骨下点距离示意
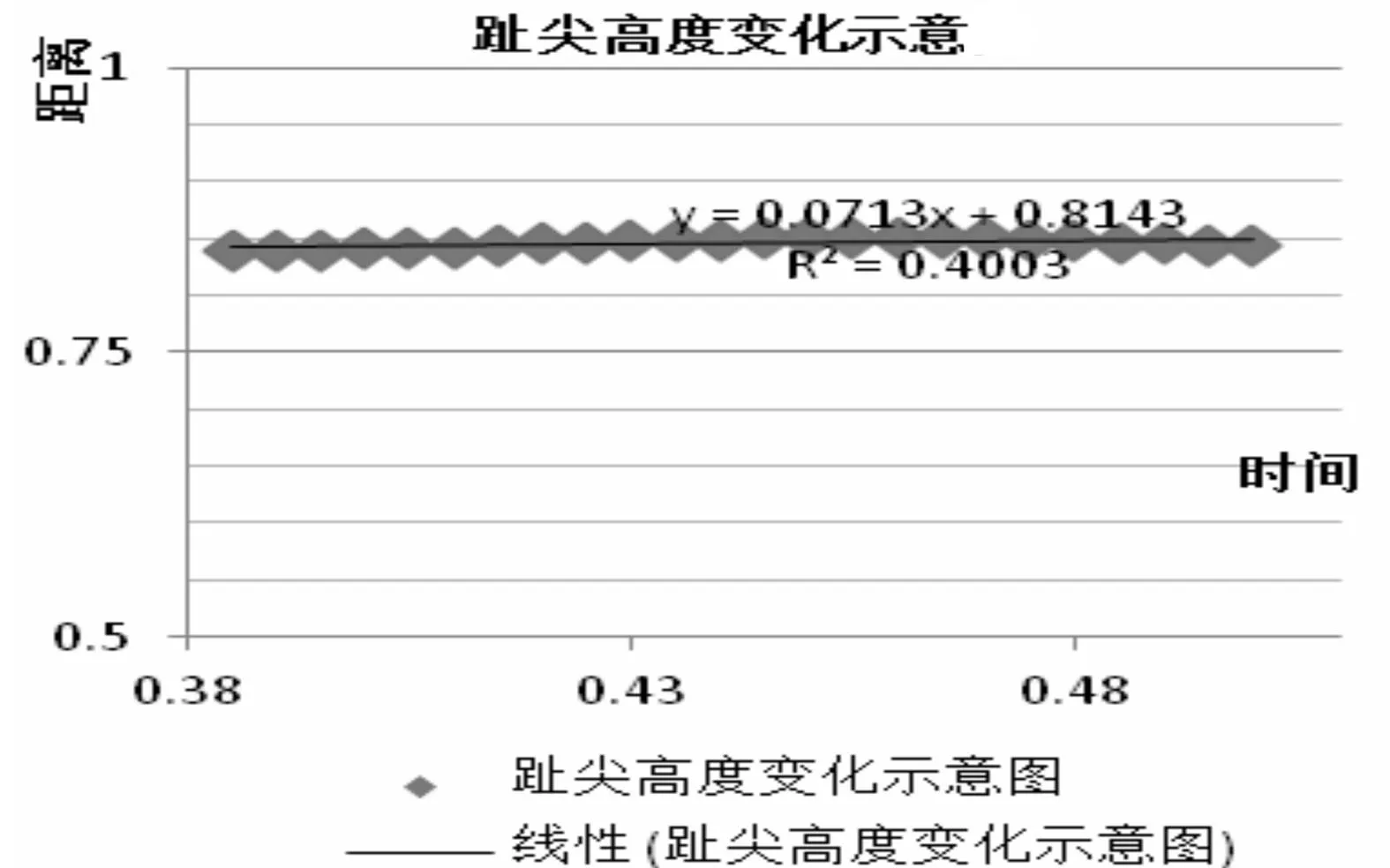
图8 狮尾趾尖高度变化示意
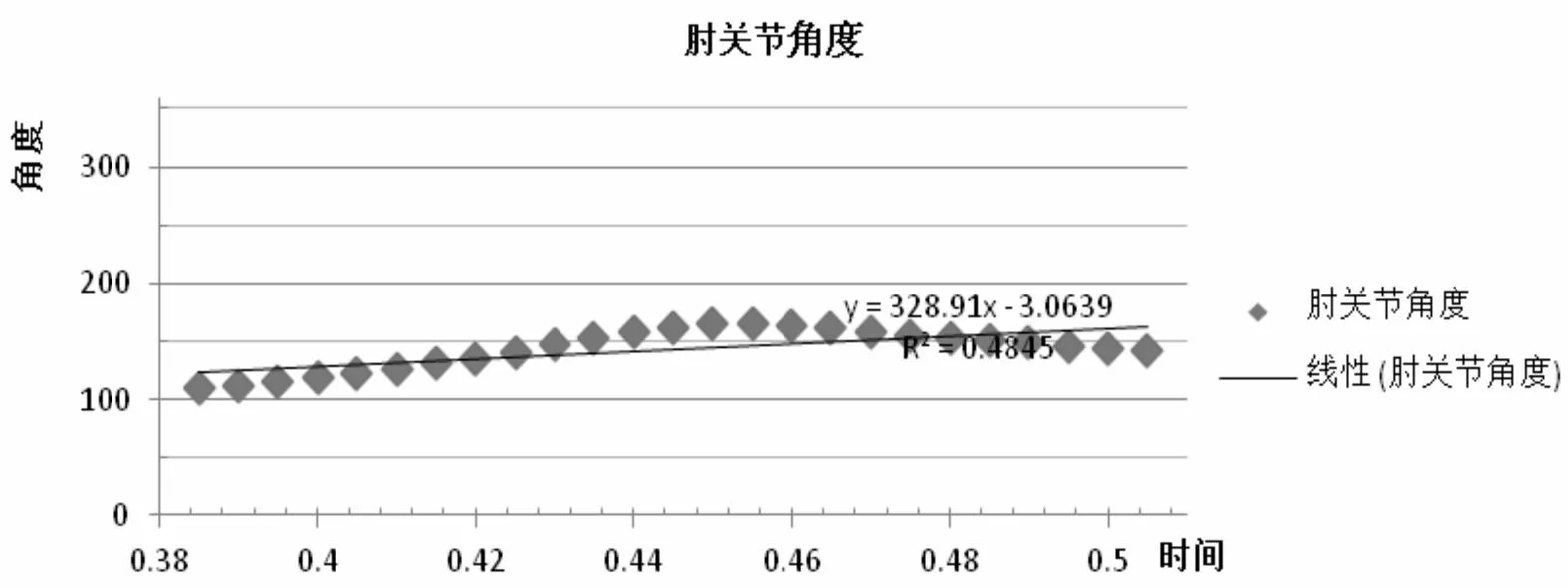
图9 狮尾肘关节角度变化示意
3结论
3.1狮尾在提拉阶段通过身体姿势和两者之间距离的变化减小身体的转动惯量,提高角加速度:狮尾四肢各环节向重心轴移动,减小狮尾自身的转动惯量,提高狮尾自身的转动速度;狮尾将狮头向自己胸骨方向的拉起,两者距离变小,旋转半径变小,转动惯量变小,增加角加速度。提拉阶段是腾空阶段的开始,狮头狮尾角速度变大,增加腾空时间,保证狮头成功飞越高台。
3.2狮尾在旋转阶段身体有360°旋转,左右脚位置也产生了交换。狮尾与狮头之间的距离曲线为左右对称的开口向上的抛物线,两者在中间位置距离最近,这时转动惯量最小,角加速度最大。在腾空阶段狮尾有单脚支撑阶段,狮尾通过减小重心的上下波动增加动作稳定性。
3.3狮尾在落地阶段各环节与重心位置变化速率均匀:狮尾自身各环节做离心运动,增加自身的转动惯量,减小自身的角加速度;狮头通过自身身体的伸展减小自身的转动惯量,减小自身的角加速度;狮尾肘关节变大,身体重心与狮头距离变大,增加了两者的转动惯量,减小了角加速度,使狮头速度降低,减少地面对狮头的冲击。
参考文献:
[1] 段全伟.舞狮运动教程[M].北京:北京体育大学出版社,2006
[2] 张 健.目前运动生物力学的主要研究方法及应用[J].体育教学, 1991, 2(2):65-69
[3] 陈 峰.运动技术摄影[J].建体育科技,1990,9(2-3):93-93
[4] S克罗莫迪霍德琼,A米特尔,ES格罗德.人工操纵活动的运动生物力学模型的最优摄影速率[J].安徽体育科技资料,1984(3):59-61
[5] 安朝臣.影像测量减少误差的方法[J].四川体育科学学报,1985,10(1):50-67
[6] 汤海鹏,程国庆.D.L.T.法-三维空间的运动生物力学摄影技术[J].体育科学,1988 (3):62-64
[7] 龚铭新.PIPS——体育视频图像解析系统的研制与应用[J].体育科研,1990(3):35-37
[8] 李良标.影片解析中人体测量点的确定方法[J].体育科学,1991(3):56-63
[9] 北京体育大学田径教学组.在摄影测量中人体关节点及环节纵轴位置的确定[J].北京体育学院学报,1984(1):54-73
[10] 刘卉.三维摄影解析中人体关节角度的计算方法[J].北京体育大学学报,2004(6):767-769
[11] 王乐军,龚铭新,黄勇,等.运动生物力学多参数同步测试系统的研究与开发[J].中国体育科技,2009(4):125-126
[12] 刘伟民,蔡国钧.同步技术在运动生物力学测试中的应用[J].体育与科学,1998(9):110-115
[13] 郑必达,郭静如,李学淞,等.高速立体摄影在1990年国际女排邀请赛中的应用研究[J].中国体育科技,1991(12):10-16

猜你喜欢
高师理科学刊(2020年2期)2020-11-26 06:01:32
四川工商学院学术新视野(2020年2期)2020-08-13 03:18:34
河北省科学院学报(2020年1期)2020-05-25 06:57:18
电子制作(2019年15期)2019-08-27 01:12:16
制造技术与机床(2018年11期)2018-11-23 01:07:50
海军航空大学学报(2015年1期)2015-11-11 17:18:37
机械制造与自动化(2014年1期)2014-03-01 04:22:01
筑路机械与施工机械化(2014年8期)2014-03-01 03:01:29
振动、测试与诊断(2014年4期)2014-03-01 01:14:01
物理与工程(2010年2期)2010-03-25 10:01:57