
集中式雷达网鉴别虚假航迹的假设检验方法
2015-12-26 02:49吴健平王国宏孙殿星谭顺成
西安交通大学学报 2015年2期
吴健平,王国宏,孙殿星,谭顺成
(1.海军航空工程学院信息融合技术研究所,264001,山东烟台;2.海军驻苏锡地区航空军事代表室,214000,江苏苏州)
集中式雷达网鉴别虚假航迹的假设检验方法
吴健平1,2,王国宏1,孙殿星1,谭顺成1
(1.海军航空工程学院信息融合技术研究所,264001,山东烟台;2.海军驻苏锡地区航空军事代表室,214000,江苏苏州)
针对电子战飞机(ECAV)编队实施的航迹欺骗容易对雷达网产生虚假空情的问题,提出了一种集中式雷达网鉴别虚假航迹的假设检验(HT)方法。首先,根据航迹欺骗的具体实际,建立了虚假目标量测的误差模型,在此基础上,利用量测数据以及目标状态估计构造了样本的量测误差协方差阵;然后,采用统计分析的方法对误差协方差阵进行假设检验,完成单雷达对航迹真实性的判决;最终,利用M/N逻辑加强判决可靠性,突出雷达网的抗干扰优势。与目前在雷达战术或技术上广泛运用的具有较强试探性的方法相比,HT方法立足理论分析,具有更好的可靠性和可行性,其虚假航迹正确鉴别率能够达到90%以上。
雷达网;航迹欺骗;假设检验;M/N逻辑
雷达及其对抗始终是现代信息化战争中争夺制电磁权的焦点。随着综合电子干扰技术的发展,单部雷达已很难与电子对抗系统展开全面抗衡。各国有关专家已公认,雷达组网是对抗体系电子干扰最切实可行的手段[1-3]。但是近年来,针对雷达网实施的干扰样式也不断推陈出新,航迹欺骗干扰就是其中的一种。对组网雷达的航迹欺骗主要包括两种形式,一种是干扰机“一对多”释放虚假航迹[4],另一种是电子战飞机(ECAV)组成编队通过相互之间的协同控制完成航迹欺骗[5]。
对于第一种航迹欺骗技术,有关研究主要集中在国内。其中,文献[4]最早提出该技术,并且详细分析了干扰机的工作原理,给出了具体的操作方法和流程,通过外场试验验证了该技术的实用性、可行性。在此之后,文献[6-7]分别针对单脉冲3坐标雷达和搜索警戒雷达进行了具体分析,进一步推广了该技术的实践与应用。另一方面,相关学者也开展了对该干扰技术的对抗研究[8-9],从雷达战术运用的角度进行了探讨,得出了一些对抗方法。
对于多机协同航迹欺骗,在国外,文献[5]首先提出利用ECAV编队对雷达网实施航迹欺骗的基本概念,从距离假目标欺骗干扰出发,详细论述了航迹欺骗过程中的各个环节,建立了虚假目标分别做匀速直线运动、匀速转弯运动等虚假航迹模型。在此基础上,文献[10-16]利用最优控制的思想对航路规划问题进行了求解。在国内,文献[17-18]先后开展了对该项干扰技术的理论研究,主要针对二维空间中的对抗进行了建模与仿真。文献[19]从ECAV对组网雷达的突防角度入手,建立了三维对抗模型,利用勒让德伪谱法将最优控制问题转化为非线性规划问题,降低了算法求解难度。
从上述分析可知,大量的研究都是基于如何快速产生稳定、逼真的虚假航迹,对于如何对抗这种新型干扰还没有做深入研究。针对干扰机进行的航迹欺骗,文献[8-9]虽然提出了一些对抗策略,但是都是雷达技术或战术上的运用,并且在实施的过程中将对真实目标跟踪产生一定影响。鉴于此,本文从理论研究的角度出发,提出了一种识别多机协同航迹欺骗的假设检验方法。首先,分析找出了真、假航迹在雷达量测误差上所体现的差异,以此为突破口构造了相关统计检验量,利用似然比假设检验完成了对航迹真、伪特性的判决。
1 系统模型
假设雷达网由3部雷达R1、R2、R3所组成,电子战飞机编队由3架无人机E1、E2、E3所组成。ECAV事先获知了雷达网的战术布局,在雷达网对监视区进行探测的过程中,它们截获各雷达发射的电磁脉冲,通过时间延迟以及相互之间的协同控制,使得各自转发的距离虚假目标分别在P1、P2处巧妙重合,经时间序列上的推移,最终形成了1条虚假航迹,其基本原理如图1所示。
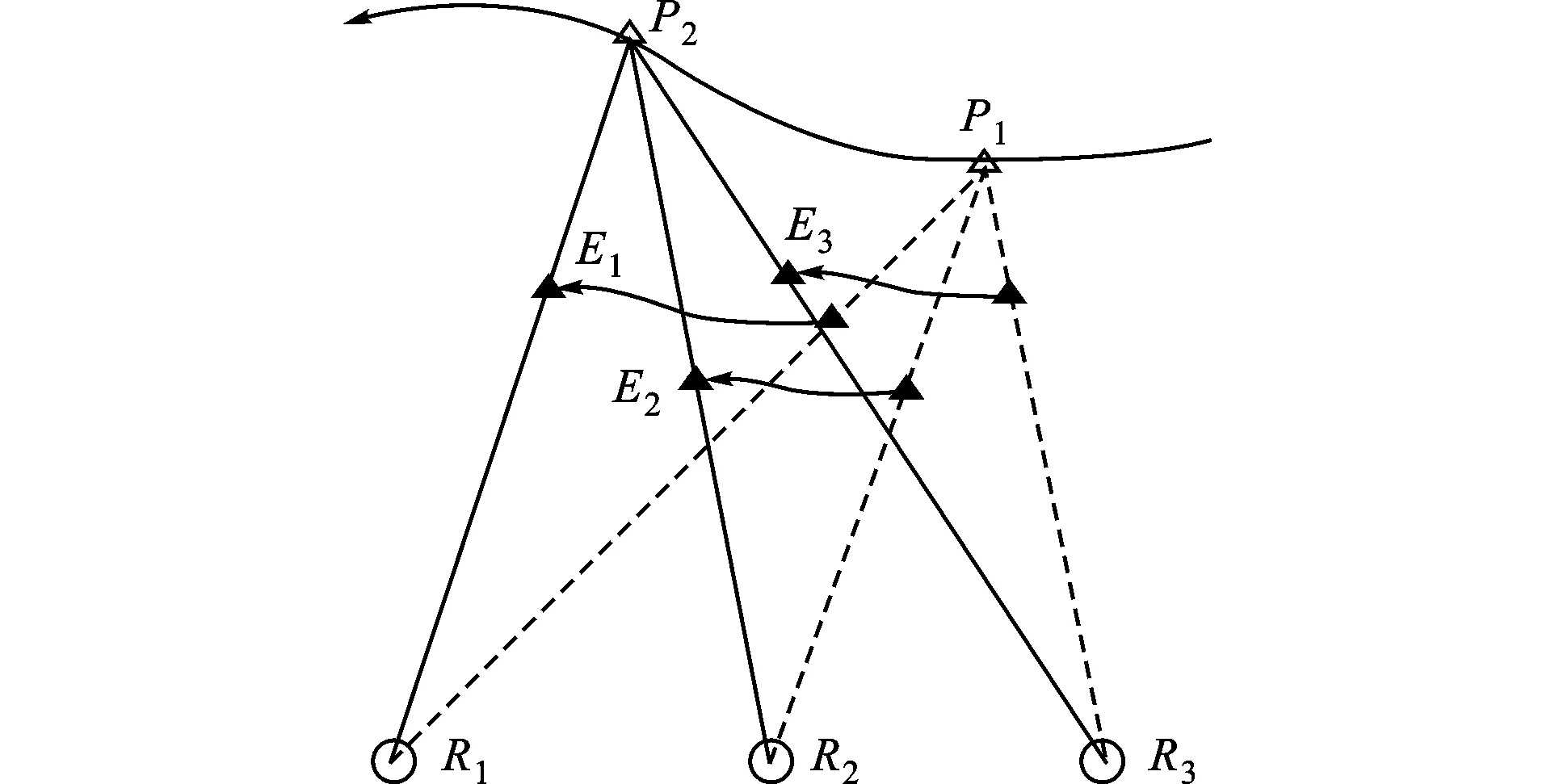
图1 虚假航迹产生原理
事实上,在航迹欺骗过程中航路规划问题十分复杂,由各ECAV转发产生的距离虚假目标在空间上很难做到完全重合。假设P11、P12、P13为分布在理想虚假点P1周围的真实虚假点,同一时刻,雷达网实际上是对3个近距离的目标进行观测,观测结果由(ri,θi)表示,如图2所示。如果观测结果在融合中心能够成功关联,则单次欺骗成功,但是3个观测所体现出的量测误差增大。鉴于此,通过构造相关检验统计量,提取虚假点与真实目标在量测误差上的差异,利用统计分析的方法即可实现对虚假航迹的准确鉴别。
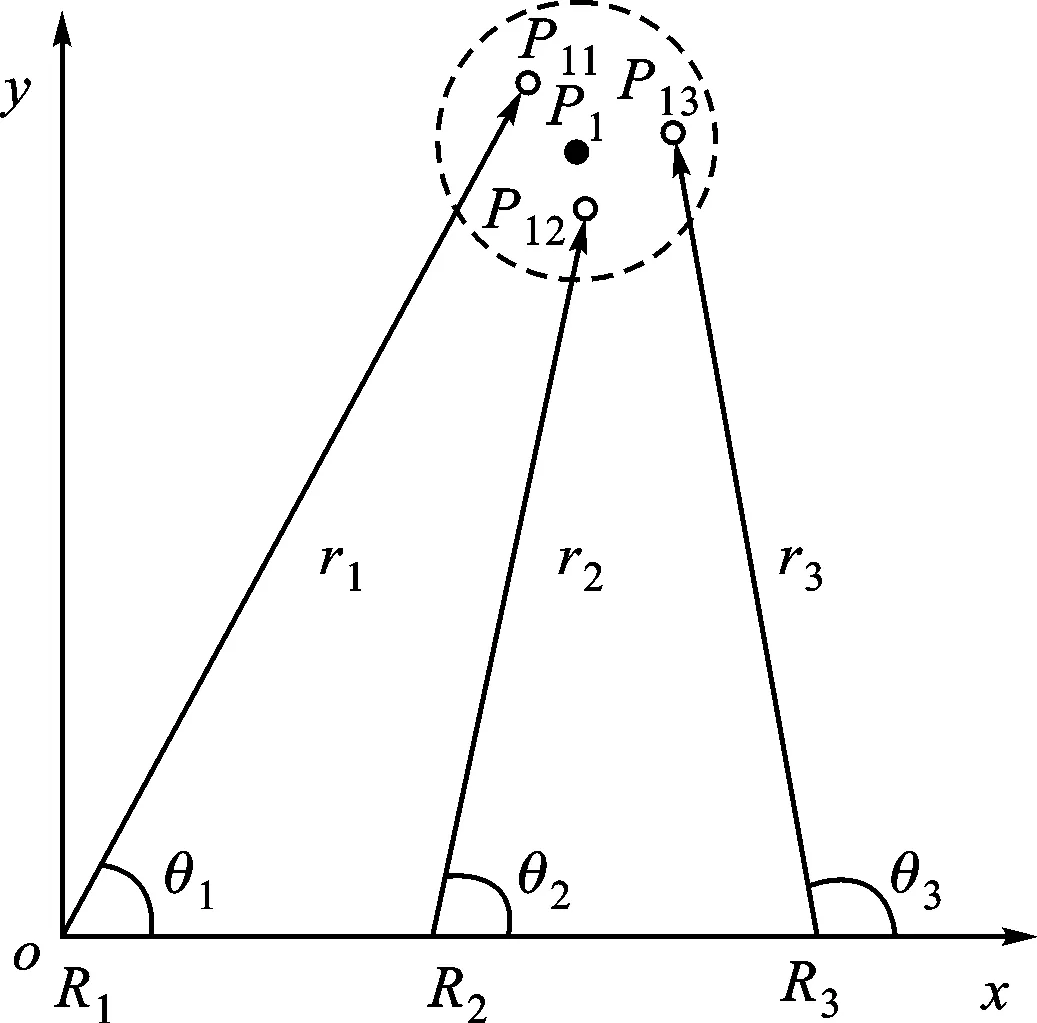
图2 ECAV转发的虚假点
2 集中式雷达网虚假航迹鉴别
2.1 量测组合预处理
在集中式多传感器目标跟踪问题中,首先需要对每个传感器送来的观测数据进行排列组合。为了简化问题起见,本文仅考虑来自ECAV转发的虚假量测。设Zi(k)=(ri(k),θi(k))表示k时刻来自雷达i的量测,Z=(Z1,Z2,Z3)表示由虚假量测构成的量测组合,它可以看成是3部雷达对位于坐标C处的同一目标的量测集合。由于C未知,因此采用似然比的方法求取C的极大似然估计
Λ(Z|C)
(1)
(2)

Λ(Z|C)≤εmin
(3)
则认为该测量组合为不合理组合,否则接受其为合理组合。针对本文研究的虚假航迹欺骗问题,如果由ECAV转发的虚假量测组合在融合中心被判为有效组合,则说明该时刻欺骗成功。
2.2 虚假航迹鉴别
2.2.1 雷达量测误差分析 对于已经形成稳定航迹的虚假航迹欺骗,本文提出利用假设检验的方法对其进行鉴别。
在图2中,假设3部雷达的坐标分别为(0,0)、(xR2,0)、(xR3,0),T1、T2、T3分别为3部雷达对虚假目标P11、P12、P13的极坐标量测,经有效性判断确定其来自同一目标,在直角坐标系下设T1、T2、T3的坐标分别为(x1(k),y1(k))、(x2(k),y2(k))、(x3(k),y3(k)),对应的目标的真实位置坐标为(x(k),y(k)),为简化表达,省略坐标中k,可得
(4)
根据误差间的转换关系,有
(5)
式中:Δxi、Δyi分别为直角坐标系下X轴量测和Y轴量测的量测误差;Δri、Δθi分别为极坐标系下的距离和方位量测误差。
对于一个真实目标,误差仅仅由雷达探测精度所决定,但是对于由ECAV转发产生的虚假目标,由于转发的点本身就有可能不重合,导致式(5)中的误差项要大于雷达自身的测量误差。假设由雷达自身探测精度所决定的量测误差分别为Δri1、Δθi1(i=1,2,3),服从0均值的高斯分布,标准差分别为σri1、σθi1;由ECAV引入的误差分别为Δri2、Δθi2(i=1,2,3),服从均值为0的高斯分布,标准差分别为σri2、σθi2。两种误差分别由敌我双方的平台所引入,二者之间没有直接的相关性,在统计上相互独立。因此有
(6)
(7)
设式(5)所体现的总的量测误差协方差阵为Vi,由雷达自身探测精度所决定的量测误差协方差阵为Vi1(Vi1=Ri),由ECAV引入的量测误差协方差阵为Vi2,则
Vi=Vi1+Vi2
(8)
同理,若雷达网融合跟踪的是一个真实目标,则Vi2=0,从而Vi=Vi1,且Vi1=Ri是由雷达自身所决定的已知矩阵;若雷达网接收的是ECAVs转发的虚假量测,则Vi=Vi1+Vi2,也即虚假量测点所体现的雷达量测误差会增大。
通过上文分析可知,如果能构造出一种检验样本来对每一个雷达量测所体现的误差方差阵Vi进行检验,那么虚假航迹的鉴别就转化为假设检验问题,对于第i部雷达的量测,有以下判断
H0:Vi=Vi1(航迹为真实航迹)
(9)
H1:Vi≠Vi1(航迹为虚假航迹)
(10)
2.2.2 雷达量测误差协方差阵检验 基于上述分析,首先需要构造检验统计量。在式(5)中,定义向量(ΔxiΔyi)T=Γi,并且令
(11)
(12)
显然向量Γi服从均值向量为0、方差阵为QViQT的高斯分布,其中矩阵Q为时变参量。
观察式(12)可知,如果能对其两端同乘以矩阵Q的逆矩阵,则可以构造向量Ψi如下
Ψi=Q-1Γi
(13)
式中:Ψi的协方差阵为常矩阵Vi。因此,本文所要构造的样本向量即为Ψi。
有关协方差阵的检验,广义似然比的方法最为普遍。在此,直接给出假设检验统计量
(14)
式中:n为样本向量Ψi的个数;m为样本向量的维数;Si为样本的协方差阵。
(15)

(16)
(17)

(18)
式中:Λi0为判决门限,在给定样本容量以及α的情况下,可查表找出门限值。
2.2.3M/N逻辑 对于整个雷达网,在上述单部雷达完成统计检验的基础上,为了提高算法可靠性,采取M/N逻辑对判决结果进行加强。本文假设雷达网由3部两坐标雷达组成,取M/N=2/3。也即,在1次Monte Carlo仿真过程中,如果有2部或者2部以上的雷达同时认为受检验的航迹为虚假航迹,则总体判决H1成立;否则,判决H0成立。
3 仿真分析
3.1 仿真初始条件
仿真以3部两坐标雷达组成的雷达网为例,以雷达1为坐标原点,雷达2、3的位置分别为(30 km,0 m)、(50 km,0 m),采样周期设为1 s。设由ECAVs拟生成的虚假目标起始位置为(130 km,100 km),在仿真中,虚假点做匀速直线运动,x轴和y轴方向的速度分别为-380 m/s、-200 m/s,虚假目标运动过程历时200 s。在统计检验过程中,显著性水平α=0.05。
3.2 仿真实验1
设3部雷达的距离量测误差标准差均为100 m,角度量测误差标准差均为0.1°;由3架电子战飞机引入的虚假目标位置误差标准差均为95 m,方位角误差标准差均为0.09°。在上述条件下,进行Monte Carlo仿真,得到各部雷达上传到融合中心的虚假量测结果如图3所示。
采用2.1节所述方法对融合中心的虚假量测组合进行有效性检验,根据式(3)设置适当的判决门限(本文取εmin=0.5),得出各量测组合的有效性判决结果,如图4所示。
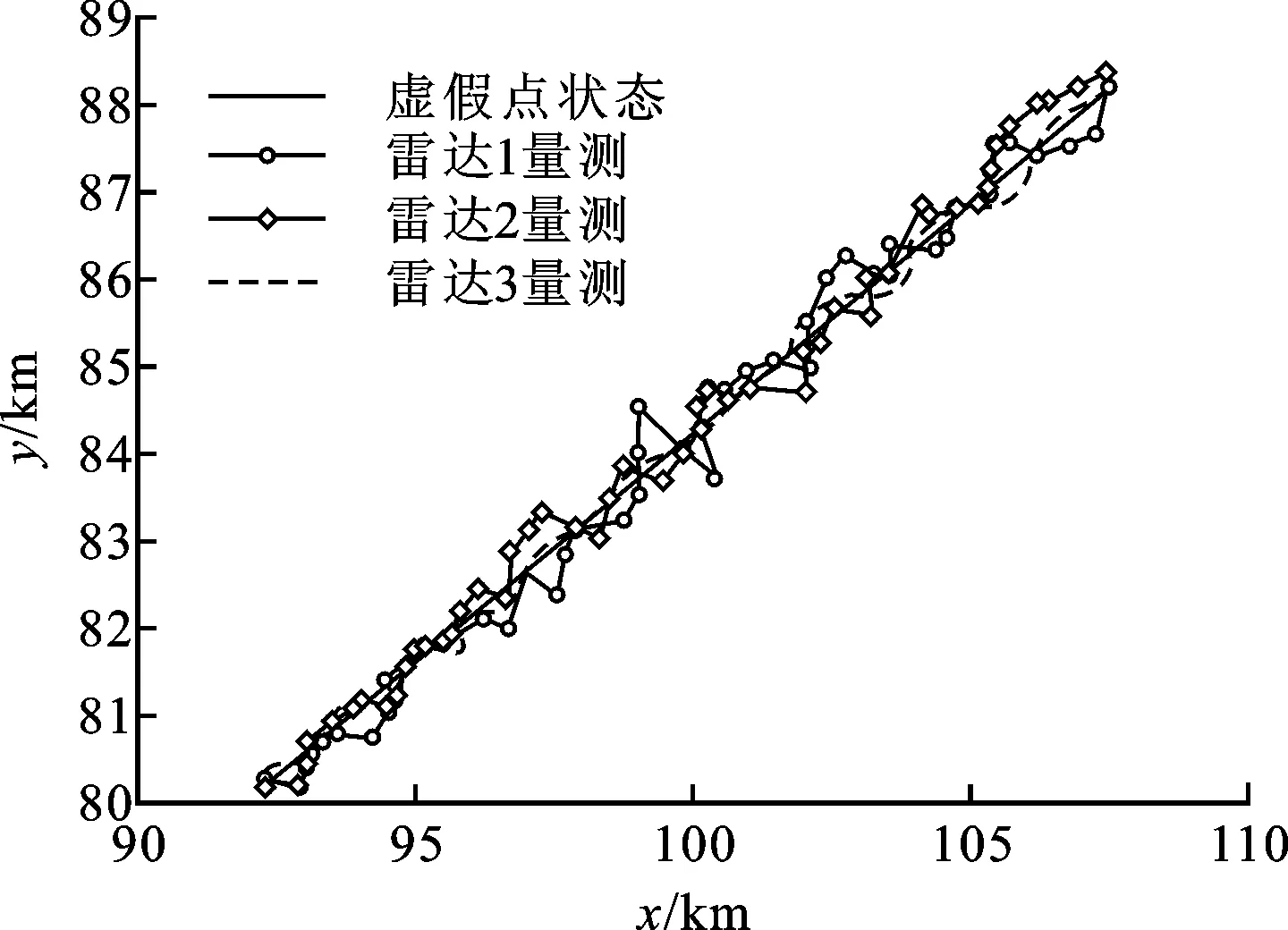
图3 理想虚假航迹与雷达量测结果
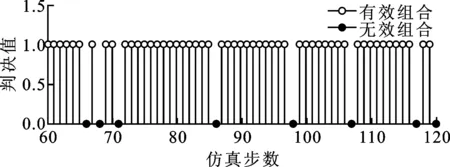
图4 量测组合的有效性检验
利用本文提出的方法对上述航迹进行鉴别,鉴别过程中,Monte Carlo仿真设为100次,样本容量均设为25,样本起始时刻均设为=90 s,得出单部雷达对虚假航迹的正确鉴别率分别为79%、76%和74%,整个雷达网对虚假航迹的正确鉴别率为88%。
3.3 仿真实验2
仿真初始条件不变,其他参数设置与实验1相同。①改变3部雷达的距离量测误差标准差,使其从80 m均匀地增大到280 m,得到σri1对虚假航迹正确鉴别率的影响,仿真结果如图5所示。②改变3部雷达的角度量测误差标准差,使其从0.05°均匀增大到0.25°,得到σθi1对虚假航迹正确鉴别率的影响,仿真结果如图6所示。
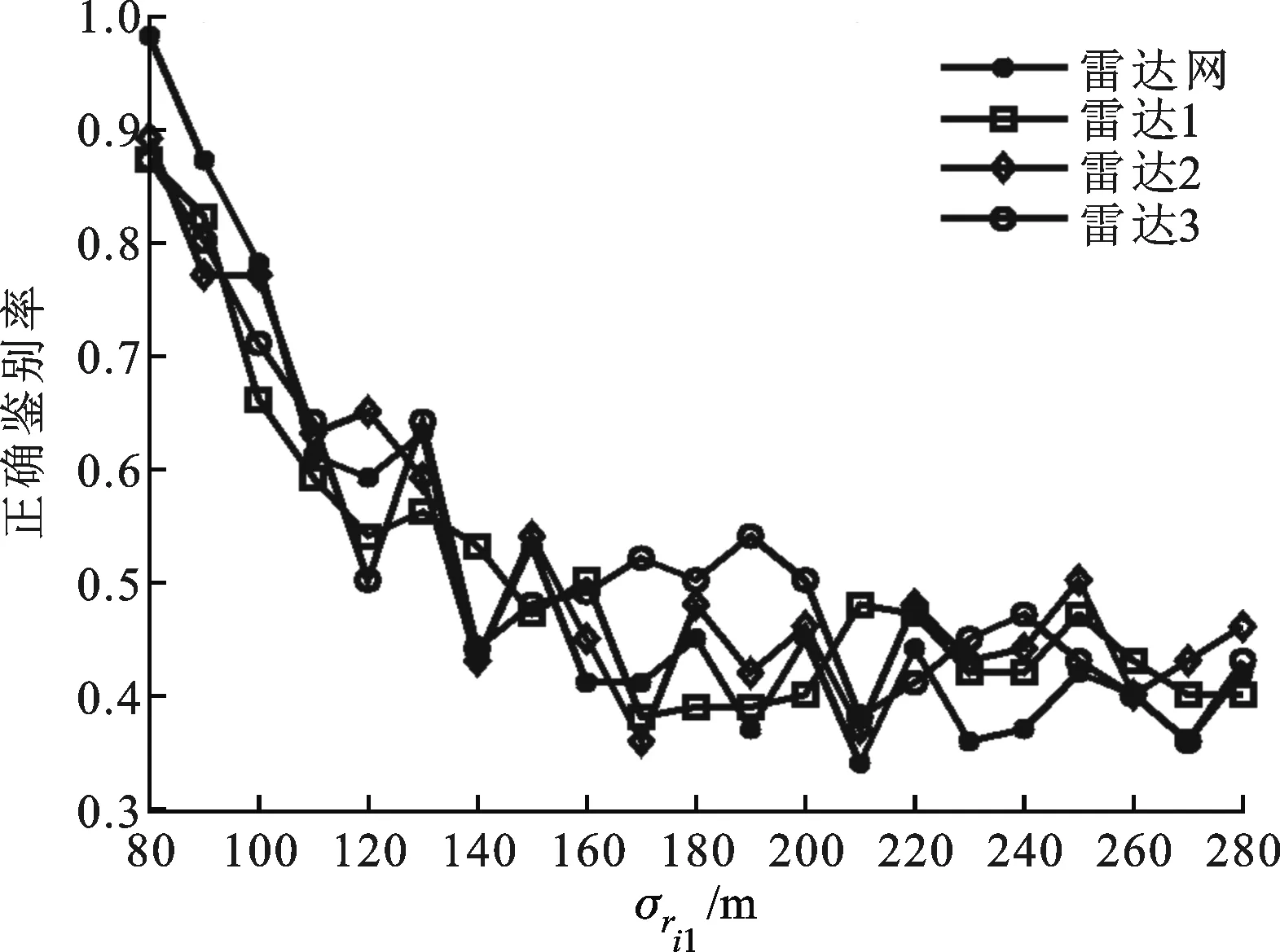
图5 雷达距离量测误差对虚假航迹正确鉴别率的影响
3.4 仿真实验3
仿真初始条件不变,其他参数设置与实验1相同。①改变3架电子战飞机引入的雷达距离量测误差,使其从80 m均匀地增大到180 m,得到σri2对虚假航迹正确鉴别率的影响,仿真结果如图7所示。②改变3架电子战飞机引入的雷达角度量测误差标准差,使其从0.05°均匀地增大到0.22°,得出σθi1对虚假航迹正确鉴别率的影响,仿真结果如图8所示。
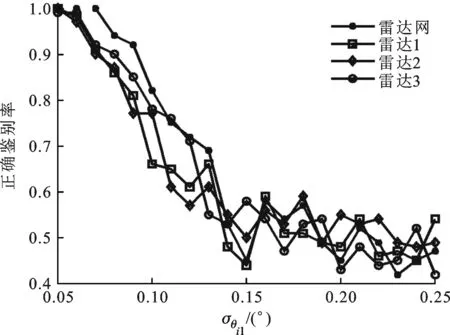
图6 雷达角度量测误差对虚假航迹正确鉴别率的影响
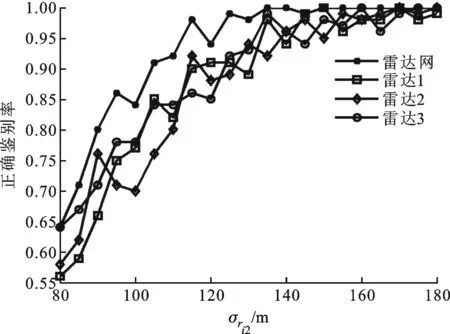
图7 ECAV引入的距离量测误差对虚假航迹正确鉴别率的影响

图8 ECAV引入的方位量测误差对虚假航迹正确鉴别率的影响
3.5 仿真实验4
仿真初始条件不变,其他参数设置与实验1相同。改变样本数量,仿真结果如表1所示。
3.6 仿真结果分析
通过以上的仿真实验可知,在ECAV引入的雷达量测误差与雷达自身精度所决定的误差彼此相当的情况下,虚假量测组合保持着较高的有效性,在跟踪过程中形成了稳定的航迹。采用本文提出的方法能够对虚假航迹进行准确鉴别。

表1 样本数量对虚假航迹正确鉴别率的影响
从图5、图6可以看出,随着雷达距离量测精度和方位角量测精度的下降,雷达网对虚假航迹正确鉴别率明显下降。反之,从图7、图8可以看出,随着ECAV引入的控制误差逐渐增大,雷达网对虚假航迹的正确鉴别率逐渐提高。分析可知,雷达量测误差增大会使无人机引入的虚假目标位置误差相对降低,从而导致虚假航迹的鉴别难度增大。电子战飞机的控制引入的控制误差决定了航迹欺骗的质量,误差越大,虚假航迹的逼真性越差,越有利于雷达网对其进行鉴别。
从表1中可以得出,随着样本数量逐渐增大,虚假航迹正确鉴别率不断提高。这是由于样本包含了航迹的基本信息,样本越大其包含的信息就越全面,越能够反应总体的统计特征,单部雷达以及雷达网也就能更准确地鉴别航迹的真伪。
4 结 论
针对电子战飞机编队对雷达网实施的虚假航迹欺骗,从原理上分析了虚假点量测与真实目标量测在量测误差上的差异,以此为突破,构造了相关检验统计量,将虚假航迹鉴别问题转化为一种假设检验。进行了仿真实验,实验结果表明该方法稳定性好,对虚假航迹的正确鉴别率较高。
[1] LI Fangyuan, XU Jia, ZHANG Xudong. Pulse jamming suppression for airborne radar based on joint time-frequency analysis [C]∥Proceedings of the 2013 IET Radar Conference. London, UK: IET, 2013: 0598-0602.
[2] 张锡祥, 刘永坚, 王国宏. 电子战技术与应用: 雷达对抗篇 [M]. 北京: 电子工业出版社, 2005: 7-13.
[3] ZHU Lianjun, DONG Yucai, JIANG Tianyuan, et al. Radar net anti-jamming capacity evaluation based on projection pursuit method [J]. Advanced Materials Research, 2014, 912: 1318-1321.
[4] 孙龙祥, 赵波, 邱卫军. 一种具有航迹特征的雷达假目标产生技术 [J]. 雷达科学与技术, 2005, 4(3): 198-202. SUN Longxiang, ZHAO Bo, QIU Weijun. A technique for generating the radar’s false target with signature of flight path [J]. Radar Science and Technology, 2005, 3(4): 198-202.
[5] PACHTER M, CHANDLER P R, PURVIS K B, et al. Multiple radar phantom tracks from cooperating vehicles using range-delay deception [J]. Theory and Algorithms for Cooperative Systems, 2004, 4: 367-390.
[6] 周续力. 对搜索警戒雷达的多目标航迹欺骗 [J]. 电子信息对抗技术, 2007, 22(6): 43-45. ZHOU Xuli. Multiple-target track deception jamming against surveillance and warning radar [J]. Technology of Electronic Information Warfare, 2007, 22(6): 43-45.
[7] 陈再兴, 余国文, 杨青. 单脉冲三坐标雷达的航迹欺骗研究 [J]. 空军雷达学院学报, 2011, 25(4): 247-250. CHEN Zaixing, YU Guowen, YANG Qing. Study of track deception of mono-pulse three-coordinate radar [J]. Journal of Air Force Radar Academy, 2011, 25(4): 247-250.
[8] 周庆昊, 严振华, 冀建民, 等. 有源航迹假目标欺骗干扰与不明空情研究 [J]. 舰船电子对抗, 2013, 36(3): 27-31. ZHOU Qinghao, YAN Zhenhua, JI Jianmin, et al. Research into active track false target detection jamming and unidentified air intelligence [J]. Shipboard Electronic Countermeasure, 2013, 36(3): 27-31.
[9] 倪建春, 王宝. 有源欺骗干扰及雷达反对抗策略研究 [J]. 舰船电子对抗, 2011, 34(3): 5-8. NI Baochun, WANG Bao. Research into the active deception jamming and radar countermeasure [J]. Shipboard Electronic Countermeasure, 2011, 34(3): 5-8.
[10]PURVIS K B, KARL J A, MUSTAFA K. Online control strategies for highly coupled cooperative UAVs [C]∥Proceedings of the 2007 American Control Conference. New York, USA: AACC, 2013: 3961-3966.
[11]MAITHRIPALA D H, MEARS M J, JAYASURUYA S. Phantom track generation through cooperative control of multiple ECAVs based on feasibility analysis [J]. Journal of Dynamic Systems, Measurement, and Control, 2007, 129(5): 708-715.
[12]XU Yunjun, BASSET G. Virtual motion camouflage based phantom track generation through cooperative electronic combat air vehicles [J]. Automatic, 2010, 46(9): 1454-1461.
[13]XU Yunjun, BASSER G. Real-time optimal coherent phantom track generation via the virtual motion camouflage approach [J]. Journal of Dynamic Systems, Measurement, and Control, 2011, 133(5): 051005.
[14]DHANJAY N, KUDUVALLI A, GHOSE D. Realistic coherent phantom track generation by a group of electronic combat aerial vehicles [C]∥Proceedings of the 2013 American Control Conference. New York, USA: AACC, 2013: 4642-4647.
[15]LEE I H, BANG H. A cooperative line-of-sight guidance law for a three-dimensional phantom track generation using unmanned aerial vehicles [J]. Journal of Aerospace Engineering, 2013, 227(6): 897-915.
[16]HAJIEGHRARY H, JAYASURIYA S. Guaranteed consensus in radar deception with a phantom track [C]∥Proceedings of the 2013 Dynamic Systems and Control Conference. New York, USA: ASME, 2013: 287-292.
[17]高斌, 毛士艺, 孙进平. 基于RGPO的编队ECAVs 协同航迹欺骗 [J]. 北京航空航天大学学报, 2011, 37(11): 1343-1346. GAO Bin, MAO Shiyi, SUN Jinping. Cooperative generation of phantom radar track using a team of ECAVs based on RGPO [J]. Journal of Beijing University of Aeronautics and Astronautics, 2011, 37(11): 1343-1346.
[18]范振宇, 王磊, 苏建春. 多机协同控制下的航迹欺骗技术 [J]. 信息与电子工程, 2010, 8(3): 265-168. FAN Zhenyu, WANG Lei, SU Jianchun. Technology of track deception for cooperative control of multiple electronic combat air vehicles [J]. Information and Electronic Engineering, 2011, 37(11): 1343-1346.
[19]李飞, 周中良, 苟新禹. 基于多机协同航迹欺骗的组网雷达突防技术 [J]. 系统工程与电子技术, 2013, 35(11): 2309-2313. LI Fei, ZHOU Zhongliang, GOU Xinyu. Technology for penetrating radar net based on multiple combat air vehicles cooperation track deception [J]. System Engineering and Electronics, 2013, 35(11): 2309-2313.
[20]KORIN B P. On the distributions of a statistic used for testing a covariance matrix [J]. Biometrika, 1968, 55(1): 171-178.
(编辑 刘杨)
A Hypothesis Testing Method for Phantom Track Discrimination in Centralized Radar Network
WU Jianping1,2,WANG Guohong1,SUN Dianxing1,TAN Shuncheng1
(1. Institute of Information Fusion Technology, Naval Aeronautical and Astronautical University, Yantai, Shandong 264001, China; 2. Military Representatives Office of Navy in Suzhou and Wuxi, Suzhou, Jiangsu 214000, China)
A discrimination method based on hypothesis testing is proposed for centralized radar networks to deal with the phantom track deception released by ECAV formation that will easily generate false air intelligence in radar networks. A measurement error model is built for phantom target according to the reality of this kind of deception. Then, a sample covariance matrix is constructed through using the radar measurement and the estimated target state. Hypothesis testing is then made to the matrix by using the statistical analysis method and to complete the sentence of track authenticity of each radar. Finally, theM/Nlogic is used to enhance the reliability of the judgment, and to highlight the anti-interference advantages of a radar network. Comparisons with existing widely used methods that are tactical or technique approaches and contain some tentative means show that the HT method is based on theoretical analysis and is reliable and feasible. The correct discrimination rate of the phantom approaches 90% or more.
radar network; phantom track deception; hypothesis testing;M/Nlogic
2014-05-21。
吴健平(1989—),男,博士生;王国宏(通信作者),男,教授。
国家自然科学基金资助项目(61002006,61102167,61372027);山东省“泰山学者”建设工程专项经费资助项目。
时间:2014-11-28
10.7652/xjtuxb201502014
TN973.3
A
0253-987X(2015)02-0080-06
网络出版地址:http:∥www.cnki.net/kcms/detail/61.1069.T.20141128.1611.003.html
猜你喜欢
现代职业教育·高职高专(2020年1期)2020-08-16
青年歌声(2019年12期)2019-12-17
计算机应用与软件(2019年2期)2019-04-01
雷达学报(2017年3期)2018-01-19
北京航空航天大学学报(2017年7期)2017-11-24
时代金融(2017年6期)2017-03-25
北京航空航天大学学报(2016年6期)2016-11-16
考试周刊(2016年54期)2016-07-18
商场现代化(2016年11期)2016-05-20
自动化学报(2016年8期)2016-04-16
