航道船舶目标检测及流量统计算法
2015-12-25 02:29:14毛兰霞
无锡职业技术学院学报 2015年2期
王 莹,毛兰霞
(1.无锡职业技术学院 汽车与交通学院,江苏 无锡 214121;2.江苏省无锡交通高等职业技术学院,江苏 无锡 214151)
为了判断内河船舶航迹是否异常,必不可少的就是要获取船舶的航迹等各方面信息,便要预先完成的是运动目标的检测。将视频图像序列中存在变化的区域分割出背景图像就是通常所说的运动船只的检测,对于运动船只检测的方法主要有背景差法、光流法和帧间差分法三种。
在本文中,提取运动目标的特征采用背景差法[1]:第一步是确定背景,背景图像通常会选用图像序列中一帧或几帧图像的平均值,第二步是确定运动目标,为了消去背景,把背景图像之后的序列图像的当前帧减去背景图像,此时设定一个阈值,若相减得到的像素值大于之前设定的阈值,则被监视场景中可以确定运动物体的存在,可以进而得到运动目标。[2]当被检测的船只行动区域不大且背景图像为准静态或是静态时,用得最多的一种运动分割的方法是背景差分法,这种情况下,背景差分的计算量虽然小但是提供的数据特征却是最为完备的,因此具有很大的实际应用价值,同时,为了弥补它在动态背景下实时性差的缺点,实时更新背景模型需要经常被考虑到。除此以外,得到航道水路中船舶的立体尺寸、航速、航向、交通流信息以及天气情况是在船舶检测的同时进行的。
1 基于多传感器的目标检测算法
通常来说,在序列图像中,将与背景图像相比有变化的区域分离出来的这种手段称之为运动目标的检测。
基于视频信息的船舶检测及其后续的预警流程主要有视频图像的采集;视频图像序列的分析(包括分析图像和船舶的位置、速度、大小以及对船只的计数)和对船舶所进行的预警处理这三个步骤。在这其中视频的采集主要由视频的采集和存储系统来完成。而在视频的图像序列的分析阶段,通过图像处理的分析技术可以获得船舶的位置、速度、船只的大小,以及船舶的数量等信息。在对船舶进行的预警处理阶段中,首先需要通过图像域对实际域的映射从而获得船舶在实际情况中的位置;然后再根据预先设定的预警区域对船只进行瞬态预警或者预测预警。在基于视频信息处理的船舶检测及其预警的整个流程中,视频序列的处理是实现船舶的检测与预警的基础。在视频序列处理过程中涉及的主要处理方法有图像预处理,即视频中的图像滤波和图像增强等手段;运动目标的检测,它主要是基于图像的形态学原理来实现的。
现有的运动目标的检测方法一般来说可以分为三大类:光流法、帧间差分法和背景减除法[4]。
1.1 光流法
当被检测的目标与检测者产生相对运动时,视觉心理学认为给检测者带来目标的运动结构信息的是被检测目标表面具备光学特征的局部位移。光流就是指检测工具和被检测目标间的相对移动时带来的亮度模式运动,简单地说就是被检测目标具有光学特征处在平面图像的投影形成了光流,可以简单地理解为物体的速度矢量场。通常我们认为,图像中被测物体的运动和检测工具的运动产生了光流,或者光流是由两者共同运动所产生。
运用光流法来计算被检测物体的运动场的基本流程是:首先,估计运动场,这种运动场是通过前后两帧图像来获取的;然后,利用前一步所得到的运动向量分割一些场景;接着再进行一些后期处理,当然对象是分割的结果,这些后期处理主要是合并小区域并且将小的噪声干扰区域消除掉等;最后,对完成后期处理的图像结果进行区域个数的统计,若说场景是有变化的,则是因为有着一个以上的不同区域的存在,反之,我们则可以认为没有任何改变发生在场景里。
1.2 帧间差分法
能适用于检测工具的移动和多个被检测物体的方法是帧间差分法,它得到被检测物体的轮廓是运用视频图像序列中相邻帧做差分的方法。为了确定视频图像序列中是否存在需要被检测的目标,通常会选择将两帧图像相减得到的亮度差的绝对值与设定的阈值相比较,以此来处理分析被检测目标的运动特性,这种方法类似于用高通滤波的办法对时域下的图像进行处理。帧间差分法同时也叫作瞬时差分法或是时间差分法,流程图如图1所示,通常是选择邻近的图像序列作为被检测帧的背景,利用图像序列相邻帧的强相关性来检测图像是否发生了变化,而来确定被检测物体的则是滤波等的后期处理[5]。
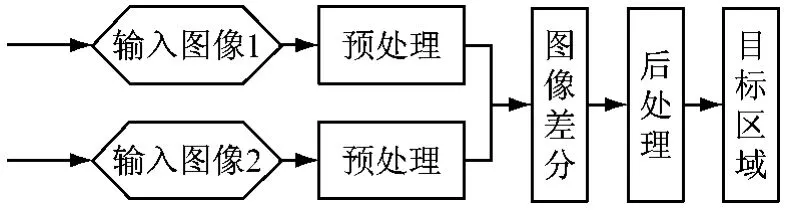
图1 帧间差分法的基本流程图
帧间差分法是受被检测物体速度影响较大的一种方法,这种方法对场景光照变化是适应力强是因为对被检测物体的检测是通过相邻两帧图像相减来实现的,不管是被检测物体运动的过快还是过慢,都会导致重复检测或者检测不完全,但是,若单单只是给其他种类的算法提供运动信息,帧间差分法是一种很好的办法。
1.3 背景减除法
背景减除法通过预先建立背景图像,即利用训练图像获得背景图像,再将每一幅待检测图像与当前背景图像作比较来检测运动的目标,并且根据场景的变化能够动态地对背景图像进行更新动作。其流程图如图2所示。
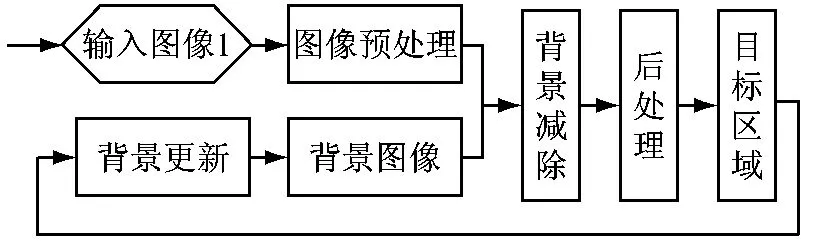
图2 背景减除法的基本流程图
创建背景模型是根据第一帧的情况,而迭代地更新现在存在的模型是由后续输入的图像来决定的,这就是迭代建模的方法,并不需要开辟大量存储空间,能够适应背景的动态变化的情况,而且算法是比较简单的。所以本文采用背景减除法中的迭代建模方法进行船舶目标检测,在检测中存在的一些问题,例如水波和相机抖动造成的噪声,本文对其进行相应改进以适应该内河航道中运动船舶目标检测的背景。
2 基于可见光的船舶流量统计算法
对于基于可见光的船舶流量的统计通常用虚拟检测线法计算,简单实用。在一个检测区域中,当船只经过虚拟检测线时,检测区域产生变化,则可以判断是否有船只经过,整个船流量统计模块的流程图如图3所示。
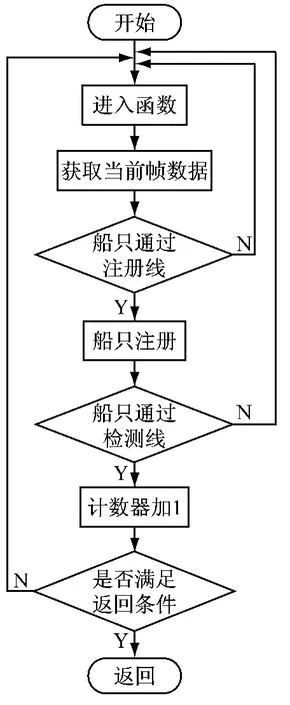
图3 基于可见光的船舶流量统计流程图
在本文中,基于可见光的船舶流量统计在上、下行方向均采用双虚拟检测线法,双虚拟检测线中,一条首次通过的虚拟检测线可以称为注册线,另一条再次经过的虚拟检测线则称为检测线,如图4所示。当船只通过注册线时,进行船只登记,但不用来计数;而当船只经过检测线,对已经登记的船只进行计数,船舶通过注册线并且通过检测线时,船舶计数器加1。由于此方法通过2条检测线进行判断,系统的可靠性相比单条检测线要有所提高。由此方法得到的船舶流量数的准确度问题受虚拟检测线的宽度、间隔和位置等因素的影响,一般来说,虚拟检测线的宽度可以和船舶航道的宽度相同;通过一些尝试,选择注册线与检测线之间的距离为正常船只长度的2/3左右,并且上、下行分开设置;同时,在船只清晰可见的地方放置虚拟检测线,即视频的近端。

图4 基于可见光的船流量统计虚拟检测线
在船只通过虚拟检测线时,一般由于船只的灰度值与背景航道的灰度值不会相同,所以,船只的经过会造成虚拟检测线上灰度值的变化。但是,有些时候摄像机的晃动或者光照的变化也会在灰度值上造成一定的干扰,这一问题可以由设置一个阈值来解决。故可以认为判断有船只经过的阈值即为虚拟检测线上的灰度值发生变化的像素个数超过30%[7],即
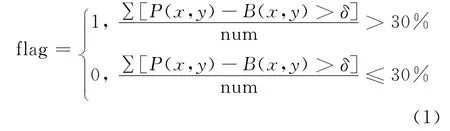
式(1)中,(x,y)为虚拟检测线的灰度值坐标;P(x,y)为当前帧图像中(x,y)处的灰度值;B(x,y)为背景图像中(x,y)处的灰度值;num为虚拟检测线的像素点总个数;为设定的阈值。
3 基于红外的船舶流量统计算法
相较于基于可见光的船舶流量统计采用虚拟检测线法,基于红外的船舶流量统计是基于船只驶入、存在和驶出与否的判断来进行计数。船舶流量统计模块的流程图如图5所示,在进行船只存在于检测区域判断时,应用双帧图像的差分检验来提高流量统计的准确性和稳定性,即若某一帧图像和后一帧图像经过处理后被判断为结果一致,则我们可以认为此结果有效;反之,当被判断为结果不一致时,则认为该结果无效并予以舍弃。基于红外的船舶流量检测区域图如图6所示。

图5 基于红外的船舶流量统计流程图
4 可见光与红外的结果对比及结论
图4是基于可见光的流量统计视频,拍摄于上海闵浦大桥,日期是2012年3月21日下午,温度为12℃,天气晴,风力为4级,能见度大约大于10 km,帧图像大小为320×240像素。图6基于红外图像的流量统计视频为2011年12月20日下午于上海同三高速G1501横潦泾大桥拍摄,温度12℃,阴天,风力4~5级,视频总帧数为3 100,帧图像大小为768×576。
分别对以上两视频用上述方法进行船只的流量统计工作,并将检测结果与实际船舶流量进行对比,如表1所示。
通过实验可以发现,船只流量统计的准确率并不是很高,造成这种结果的主要原因是在河面上经常出现一些横穿、斜穿河面以及跨航道转弯、掉头的船只,这些有异常行为的船只经过检测区域时触发了计数器,导致了统计结果的不是很精确,但基本能满足工程需求。

表1 可见光与红外图像的船舶流量统计结果对比
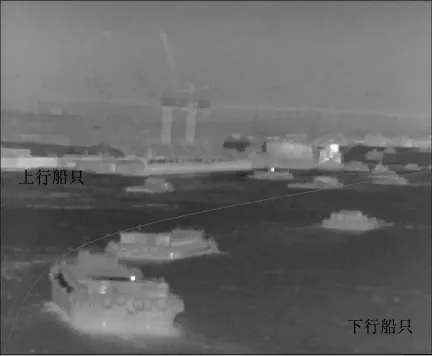
图6 基于红外的船舶流量检测区域
5 小结
本文对于内河桥梁防船撞的船舶检测和船舶流量统计进行了一定的描述。针对文中应用不同传感器所拍摄的场景,提出了不同的船舶流量统计算法,即基于可见光的船舶流量统计采用虚拟检测线法而基于红外的船舶流量统计是基于船只驶入、存在和驶出与否的判断来进行计数。通过进行相关的实验并对实验结果的分析表明,以上两种算法能够解决上述所提出的问题,可以满足工程需求,同时算法的计算量小,适用于实时性应用场景。
[1] JAIN R.Difference and accumulative difference pictures in dynamic scene analysis[J].Image and Vision Computing(S0262-8856),1984,2(2):99-108.
[2] 云霄,肖刚.基于Camshift的多特征自适应融合船舶跟踪算法 [J].光电工程,2011,38(5):52-62.
[3] 阮秋琦.数字图像处理学[M].北京:电子工业出版社,2001.
[4] 王欢.运动目标检测与跟踪技术研究[D].南京:南京理工大学,2009.
[5] 陈燕萍.基于背景减除的运动目标检测算法研究[D].厦门:厦门大学,2008.
[6] 吴志伟,范彦斌,卢清华.基于视频的车辆流量自动检测方法设计[J].佛山科学技术学院学报:自然科学版,2012,30(1):1-5.
猜你喜欢
湖南理工学院学报(自然科学版)(2022年1期)2022-03-16 05:32:58
时代汽车(2021年18期)2021-09-17 11:51:59
牡丹(2021年11期)2021-07-20 06:02:34
电动工具(2020年6期)2020-12-29 05:53:36
设备管理与维修(2020年2期)2020-03-24 13:12:06
物探化探计算技术(2015年2期)2015-02-28 17:42:47
舰船科学技术(2015年8期)2015-02-27 15:38:51
振动工程学报(2014年2期)2014-03-01 01:15:10
城市道桥与防洪(2014年8期)2014-02-27 07:29:06
装备制造技术(2012年12期)2012-08-31 02:31:38