
基于自适应单脉冲的卫星角度测量方法
2015-12-21 08:59顾学军潘点飞
航天电子对抗 2015年1期
顾学军,潘点飞
(中国人民解放军63637部队,甘肃 酒泉732750)
0 引言
在各种卫星角度测量方法中,单脉冲测角方法以其实现简单、精度高、稳健性好等优点在实际系统得到了广泛的应用。但基于多喇叭天线或者多馈源照射反射面的传统单脉冲测角方法,难以满足测控、雷达、电子侦察等领域对多目标同时观测的需求,且存在结构复杂、抗干扰能力差等不足。这是因为,当同时形成多个波束时,需要复杂的馈源结构构成单脉冲跟踪网络,导致其插损大、效率低[1]。而数字单脉冲技术通过数字波束形成的方法实现和、差波束,具有波束灵活可控、便于实现多个目标的同时测量跟踪等优点。数字单脉冲的和差波束形成加权方法主要有四种:直接和差加权方法[2]、半阵法、对称取反法以及四指向和差法[3]。Chou[4]采用模拟与数字相结合的多波束形成方法,该方法只适用于阵元数目不是太多的小型阵列。文献[5]与[6]采用子阵级和差多波束形成方法,实现对大型阵列的降维处理,通过阵元级与子阵级和差联合优化逼近,提高大型阵列波束形成性能。上述和差多波束形成方法主要针对无干扰或者旁瓣干扰情况,当存在主瓣内干扰时,和差多波束形成方法将更加复杂[7-8]。
本文采用数字单脉冲的角度测量方法,通过数字加权实现对卫星角度的测量跟踪;针对干扰对角度测量的影响,提出自适应和差波束形成方法,以抑制干扰的影响,提高卫星角度测量的精度。
1 基本原理
数字波束形成是指通过对阵列天线进行采样加权求和,以增强期望方向的传播信号,抑制其他方向的无用信号,提高信号接收质量的空间滤波技术。以N 元均匀接收线阵为例,阵列模型如图1所示。
假设阵元1为参考阵元,其接收到的远场来波信号为:

整个阵列接收数据可表述为:

图1 均匀线阵模型

式中,A(θ)=[a(θ1),a(θ2),…,a(θP)]T表示阵列流型矩阵,S(k)=[s1(k),s2(k),…,sP(k)]T是信号数据矩阵,N(k)=[n1(k),n2(k),…,nN(k)]T为噪声数据矩阵。
对于均匀线阵,阵列流型如下:

式中,λ是信号波长,d 为阵元间距。
单脉冲测角的基本原理是通过和差波束获得期望目标的空间角度信息。常用的单脉冲技术有以下三种:比幅单脉冲,比相单脉冲以及和差单脉冲。比幅单脉冲的波束具有相同的相位中心,利用两个波束接收信号的强度比提取目标角度信息;比相单脉冲的波束具有相同的空间指向,利用两个波束接收信号的相位差获取目标的角度。幅度和差单脉冲与比幅单脉冲相似,其和波束指向目标方向,差波束在天线视轴方向为零,并且关于天线视轴反对称,其和差波束以及单脉冲比曲线如图2所示。
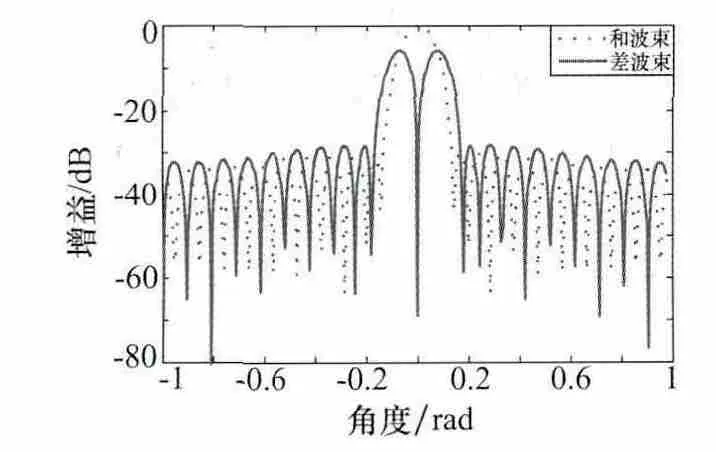
图2 幅度和差单脉冲波束图
与比幅单脉冲和比相单脉冲相比,幅度和差单脉冲的准确性和稳定性不易受幅度和相位的影响,且接收通道的平衡性要求相对宽松,因此在实际工程中的应用更为广泛。
幅度和差单脉冲的和差波束可表示为:

单脉冲比曲线(MRC)为:
2 自适应和差波束形成方法及测角
2.1 常规和差波束形成方法
由和差单脉冲测角的原理可知,和差波束的形成是有效实施测角的前提。常用的直接和差波束加权方法,通常采用Taylor加权与Bayliss加权来获得和、差波束,但该方法仅适用于均匀阵列,且抗干扰能力较弱。
半阵法是一种简单的和差波束形成方法,其方法是将阵列等分为左右两个部分,在目标方向θ0产生指向为θ0+Δθ、θ0-Δθ的两个波束,两者相加得到和波束,两者相减得到差波束。设阵元总数为2 N,指向θ0+Δθ的加权向量与波束分别为WR和PR,指向θ0-Δθ的加权向量与波束分别为WL和PL,则:

同理:

式中,uR(θ)=sin(θ)-sin(θ0+Δθ),uL(θ)=sin(θ)-sin(θ0-Δθ)。因此,和差波束分别为:

可以看出,半阵法得到的和差波束仅由整个阵列的一半阵元输出获得,导致角度测量的空间分辨率降低、灵敏度较差。
对称取反法也是基于“半阵”方法实现的,不同之处在于该方法的左右两组阵列都指向同一个方向,且和差波束是由全部阵元得到的,该方法在实际工程的应用较为广泛。
整个阵列方向图为:

式中,V=[1 e-j2πdsinθ/λ… e-j2π(2N-1)dsinθ/λ]T为 阵 列流型。设WD与WS分别为和波束与差波束加权向量,则和、差方向图可表示为:

考虑到和差波束的特性,即和波束方向图是关于天线视轴对称的偶函数,差波束方向图是关于视轴方向的奇函数,并且和波束在视轴方向取最大值,差波束在视轴方向取零值。因此,和差波束的加权向量可表示成下列形式:

式中,θs是阵列天线视轴方向,TD=[1N-1N]T,1N为1×N 的单位向量,⊙表示两个向量的对应元素相乘。
2.2 卫星角度测量
根据和差波束的输出,可得单脉冲比曲线为:

式中,

令u0=sinθ-sinθ0,则:

同理,可得到差波束为:

因此:

将u0=sinθ-sinθ0在θ0处用一阶泰勒级数展开,可以近似表示为:
由上述两式可得到待测目标的偏离角为:

由此可知,利用得到和差波束值,并利用(16)式即可求出波束的偏角,从而实现利用和差波束对目标星进行测角。
2.3 自适应和差波束方法
当空间存在干扰,或者多个目标空间角距离较近时,常规和差波束形成方法得到的角度误差较大,有时甚至会出现跟错目标的情况。这是由于干扰影响到和差波束的性能,造成单脉冲比曲线畸变,进而引起角度测量的误差。因此,将数字单脉冲与自适应数字波束形成方法有效结合,增强数字单脉冲技术的适用性与抗干扰性,成为多目标角度测量中值得关注的热点。
为减少干扰对卫星角度测量的影响,将自适应方法应用于和差波束形成。采用修正后的最小方差无失真响应(MVDR)算法,经过自适应加权后,接收到的目标的输出方差最小,且和差单脉冲比曲线无失真。加权向量应是满足下列极值方程的解:

式中,C 为约束矩阵,f 为约束矩阵对应的响应。为了使自适应和差波束在抗干扰的同时,保持单脉冲角度测量不受影响,即单脉冲比曲线保持不变,约束矩阵及其对应的响应为C=[α(θ0),α(θ0+1),α(θ0-1),α(θ0+2),α(θ0-2),α(θj),α(θj+1),α(θj-1)]T,对应的阵列响应为f=[P(θ0),P(θ0+1),P(θ0-1),P(θ0+2),P(θ0-2),P(θj),P(θj+1),P(θj-1)]T,其中P(θ0)和P(θj)分别为天线视轴方向和干扰方向的天线增益。
根据MVDP自适应算法的原理,可得到的最优权向量应为:

运用上述方法产生和差波束的加权向量如下:

式中,RS与RD分别为和、差协方差矩阵;CS与CD分别为和、差约束矩阵。fS与fD分别为和、差约束矩阵对应的响应。
3 仿真结果分析
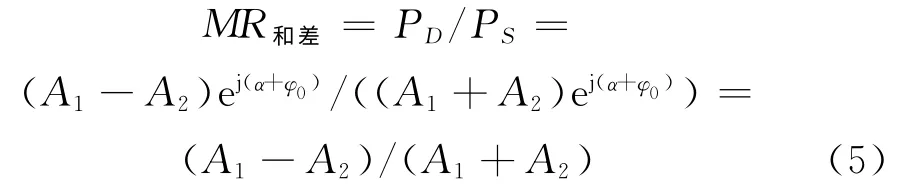
仿真1:以阵元数目为100的线阵为例,设期望目标方向为0°,SNR 为0dB,强度为30dB的两个干扰分别位于-5°和0.6°方向。采用本文提出适应单脉冲测角方法,得到和差波束图以及单脉冲比曲线如图3所示。
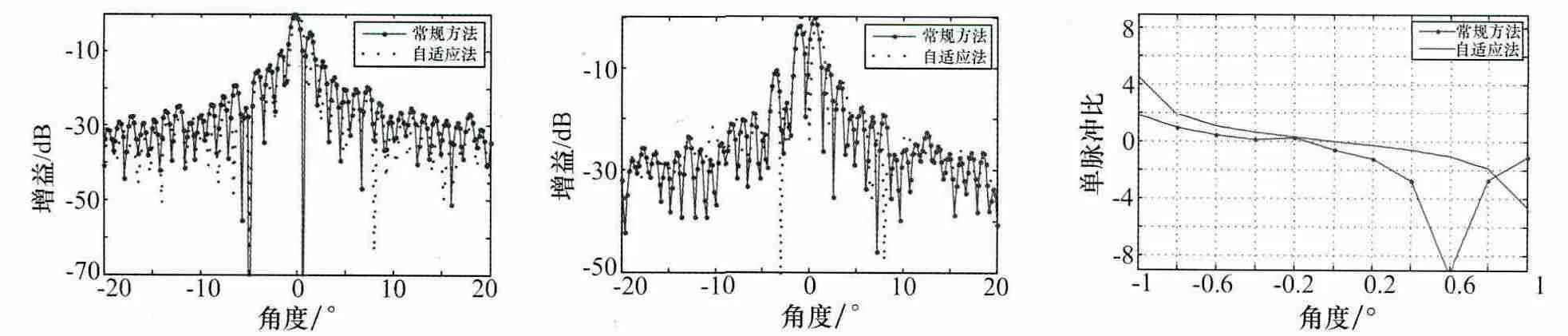
图3 干扰对和差波束及单脉冲比曲线的影响
可以看出,旁瓣干扰对单脉冲比曲线的影响并不明显,而主瓣干扰(即干扰位于目标接收波束的主瓣内)将使单脉冲比曲线的单调性、线性等特性发生畸变,进而影响到测角测量的准确性与精度;采用本文自适应单脉冲方法能够使和差波束在干扰方向形成抗干扰零陷的同时,保持其单脉冲曲线的性能不受影响。
仿真2:采用扩频信号体制,目标间以码分多址的方式加以区分,天线接收信号信息速率为1.7kbit/s,扩频伪码速率10Mchip/s,信号强度分别为0dB 和30dB。卫星轨道高度为500km,速度为10km/s,工作频率为2GHz的目标,运行的角速度约为1.1°/s。参考航天测控中常规的角度扫描参数[9],阵列天线波束宽度为2°,波束扫描精度为0.2°。阵列模型与仿真1相同,假设卫星在一维角方向上从-10°到10°运动,且在与目标相距1°角方向存在一个干扰星,其运动参数与目标星相同。图4为两种方法得到的卫星角度测量误差随时间的变化关系。
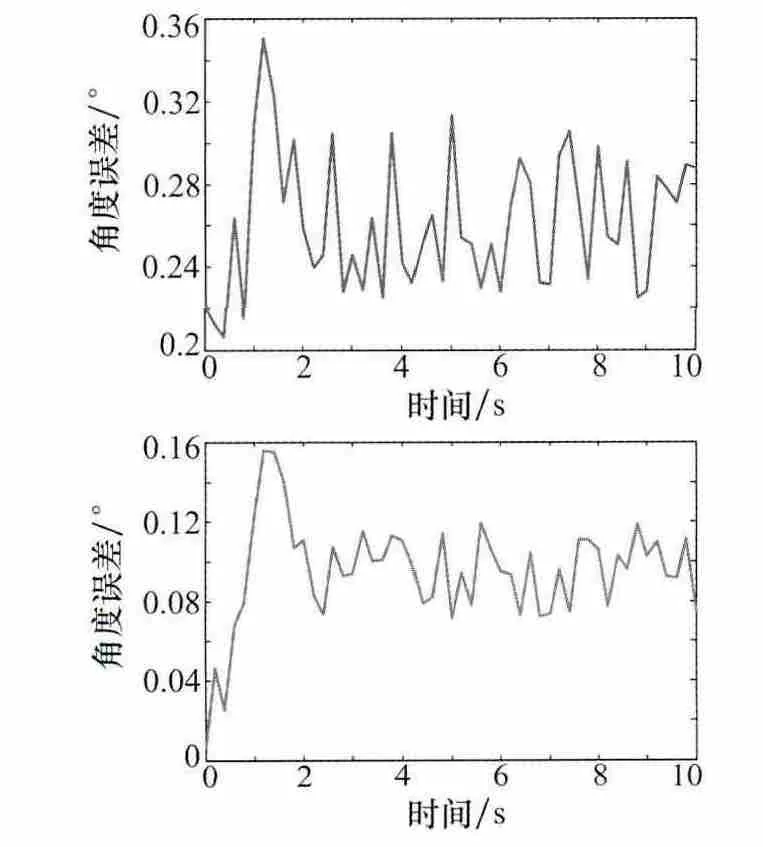
图4 单脉冲角度测量的误差曲线
可见,常规单脉冲测角方法得到的角度误差震荡幅度较大,最大误差高于0.3°,无法满足角跟踪的精度需求。而自适应单脉冲方法得到的角度误差震荡幅度在0.12°以内,收敛时间在2.5s左右。
4 结束语
本文介绍了卫星角度测量的常用方法,分析了干扰对常规单脉冲角度测量的影响,重点介绍了一种自适应单脉冲角度测量方法。该方法将数字单脉冲与自适应数字波束形成方法有效结合,在有效抑制干扰对测角影响的同时,保持单脉冲比曲线不发生畸变,从而保持单脉冲跟踪的精度与准确性。■
[1]Rocca P,Poli L,Manica L,et al.Synthesis of monopulse time-modulated planar arrays with controlled sideband radiation[J].Radar,Sonar & Navigation,IET,2012,6(6):432-442.
[2]Chen L,Sheng W,Ma X,et al.Adaptive monopulse beamforming with partial parallel structure[J].Systems Engineering and Electronics,2012,23(6):802-814.
[3]丁鹭飞.雷达原理[M].3版.西安:西安电子科技大学出版社,2002:202-209.
[4]Chou HT,Bai KH,Sun CC,et al.Design of multi-beam antenna array using tapered slot elements[C]∥Electromagnetic Theory (EMTS),Proceedings of 2013 URSI International Symposium on IEEE,2013:863-865.
[5]孙晨伟,陶海红,王莹,等.大型阵列降维-和差多波束形成的联合优化算法[J].电子学报,2013,41(3):519-525.
[6]曾操,陈昊,何学辉,等.相控阵子阵级和差多波束测角方法[J].西安电子科技大学学报,2013(1):19-25.
[7]胡航,张皓,宗成阁,等.子阵级自适应单脉冲的四通道主瓣干扰抑制[J].电波科学学报,2009,24(5):820-825.
[8]刘聪锋,杨洁,甘昶.加载与约束结合的主瓣干扰抑制方向图保形[J].电波科学学报,2012,27(2):344-349.
[9]吴海洲,王鹏毅,郭肃丽.航天测控系统高动态目标角捕获方法研究[J].载人航天,2010(4):42-45.
猜你喜欢
电讯技术(2022年9期)2022-09-28
信息通信技术(2022年2期)2022-05-31
雷达科学与技术(2021年3期)2021-08-02
火控雷达技术(2021年1期)2021-04-20
成都信息工程大学学报(2021年6期)2021-02-12
北京航空航天大学学报(2020年3期)2021-01-14
舰船科学技术(2020年3期)2020-04-22
计算机测量与控制(2018年10期)2018-10-18
航天电子对抗(2018年3期)2018-07-14
航天电子对抗(2018年6期)2018-03-04
