
单神经元网络算法在电液比例控制中的应用研究
2015-12-15 10:48梁春平于兴军张鹏飞梁卫斌游娜
电气自动化 2015年5期
梁春平 ,于兴军,张鹏飞,梁卫斌 ,游娜
(1.国家油气钻井装备工程技术研究中心,陕西 宝鸡 721002;2.宝鸡石油机械有限责任公司,陕西 宝鸡 721002)
0 引言
电液系统具有低成本、功率密度高、响应快速,以及较高的刚性和载荷承受能力等优点[1],在各种动力机械系统中得到广泛应用。各种高精度的伺服阀、伺服缸及伺服马达[2]等能解决大负载、大扭矩的工作特点给比例控制精度和响应速度带来问题,但与伺服系统相比,普通的电液比例阀抗污染能力强,容易操作和保养,易于提高系统的可靠性,更适用于工业过程;同时,比例阀本身成本和应用成本都比伺服阀低,因此在很多工程机械中电液比例阀的应用更为广泛[3-5]。
电液比例控制系统具有复杂的高介非线性特性,这些不确定因素会使得因电气-液压系统以及机械系统的非线性因素变得更加复杂,很难建立精确的数学模型,为了提高执行机构的快速响应能力,只有设计具有快速稳定跟踪能力的控制器,液压系统的优势也才能得以充分的体现[6]。电液比例控制系统大多采用PID控制技术。常规PID控制具有算法简单、可靠性高、参数调整容易等优点,但对于时变、非线性系统难以满足要求[7]。在很多液压伺服比例控制中,学者和工程师们设计了很多优秀的控制器,如主动式车辆悬挂系统中的最优控制准则,滑模控制,模糊控制理论等[8],然而这些控制算法很多在实际情况中因为很多现实因素影响而不能得到很好的应用[9]。单神经元自动适应智能PID控制器,具有结构简单,能适应环境变化,有较强的鲁棒性[10],本文将单神经元网络算法在电液比例阀控制中进行了实践。
1 电液比例控制的系统结构
电液比例控制过程就是控制器输出经过放大器进行功率放大后驱动电磁阀工作,电磁阀按照电信号打开阀芯,控制液压流体驱动执行器件。要实现速度或者位置的精确控制,必须采用闭环控制,且控制器应为带一定算法的数字控制器或模拟控制器,由于电液比例控器数学建模困难,一般采用数字控制器容易实现,其结构如图1,其中数字控制器是控制核心,负责集成信号处机理及控制算法。

图1 系统结构图
本应用平台采用的控制器是西门子的PLC 300系统,数字模拟量的相互转换也是采用西门子标准模块,液压系统回路采用背压节流调速方式,比例放大器是Atos的E-ME-AC-5H。执行器是液缸和旋转马达,液缸的传感器采用的位移传感器输出信号是4~20 mA信号,旋转编码器采用的是P+f PVM14绝对值型编码器,具备DP总线通讯功能,与控制器兼容良好。
2 单神经元网络PID智能控制原理
神经网络采用Hebb学习规则,基本思想[10]是:如果同时激活两个神经元,其联系强度的增强与他们激励的乘积成正比,结合无监督和有监督的Hebb学习规则,如式(1):

式中Δωij(k)表示神经元j和神经元i的联系权值;
dj(k)表示期望输出;
Oj(k)表示实际输出,作为神经元j的激活值;
Oi(k)表示神经元i的激活值。
在PID控制中,主要是根据输出、误差、误差变化率来调节PID三个参数,所以基于式(1)的单神经元自适应PID参数整定为式(2):

式中 W(k)=[ωp,ωi,ωd],表示归一化处理后,PID 参数各自所占权重;
W1(k)=[ω1p,ω1i,ω1d],表示 PID 调节后各参数的值;
Η =[ηp,ηi,ηd],表示 PID 参数的学习效率;
e(k),误差量;
u(k-1),上次控制量的输出量;
Δe(k)=e(k)-e(k-1),误差变化量。
根据增量PID原理,实际控制量的输出如式(4)

式中K为神经元的比例系数。

3 控制器的软件设计
根据上述控制原理,其控制框图如图2所示。其中的F部分是传感器信号采集完进行滤波及物理量化处理。根据控制框图2,得算法部分程序的流程图如图3。
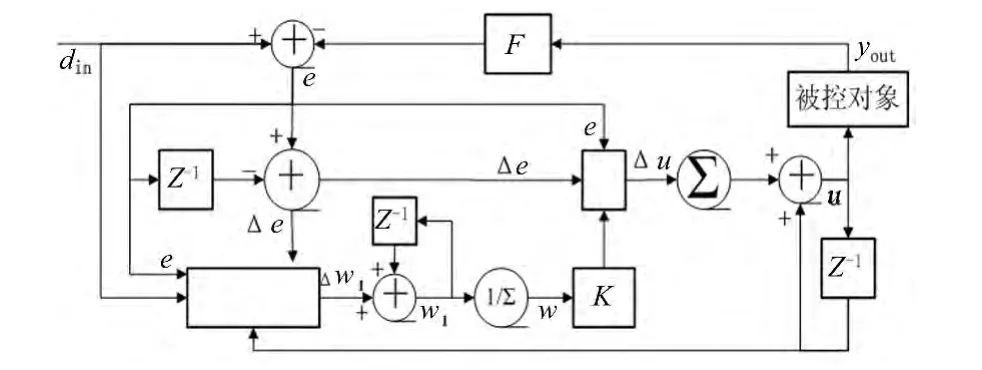
图2 控制框
进行软件设计时,需要考虑采样周期的选择合理,理论上是采样频率越高,调整越快,数字模拟越精确,控制效果越接近连续控制,也能有效降低时延。但采样周期太小,会使积分作用、微分作用不明显;且采样周期小到一定程度时,前后两次采样的差别反映不出来,使调节作用减弱;控制大惯量的系统时,还应考虑执行的动作惯性,采样周期的选择要与之匹配,否则执行机构来不及响应控制器的输出。
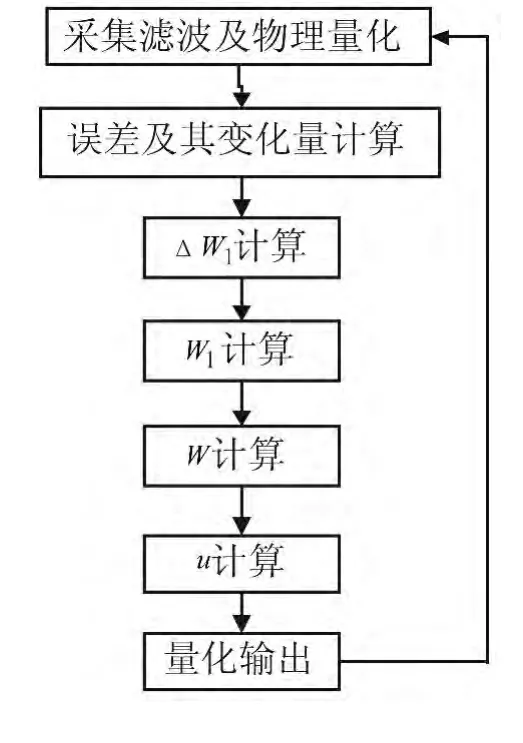
图3 程序处理流程图
4 应用及分析
该应用系统中的电液比例阀主要用来控制驱动液压缸和液压马达两种典型的液压执行机构,系统在采用常规PID控制,经过反复调试,比较理想的结构如图4。
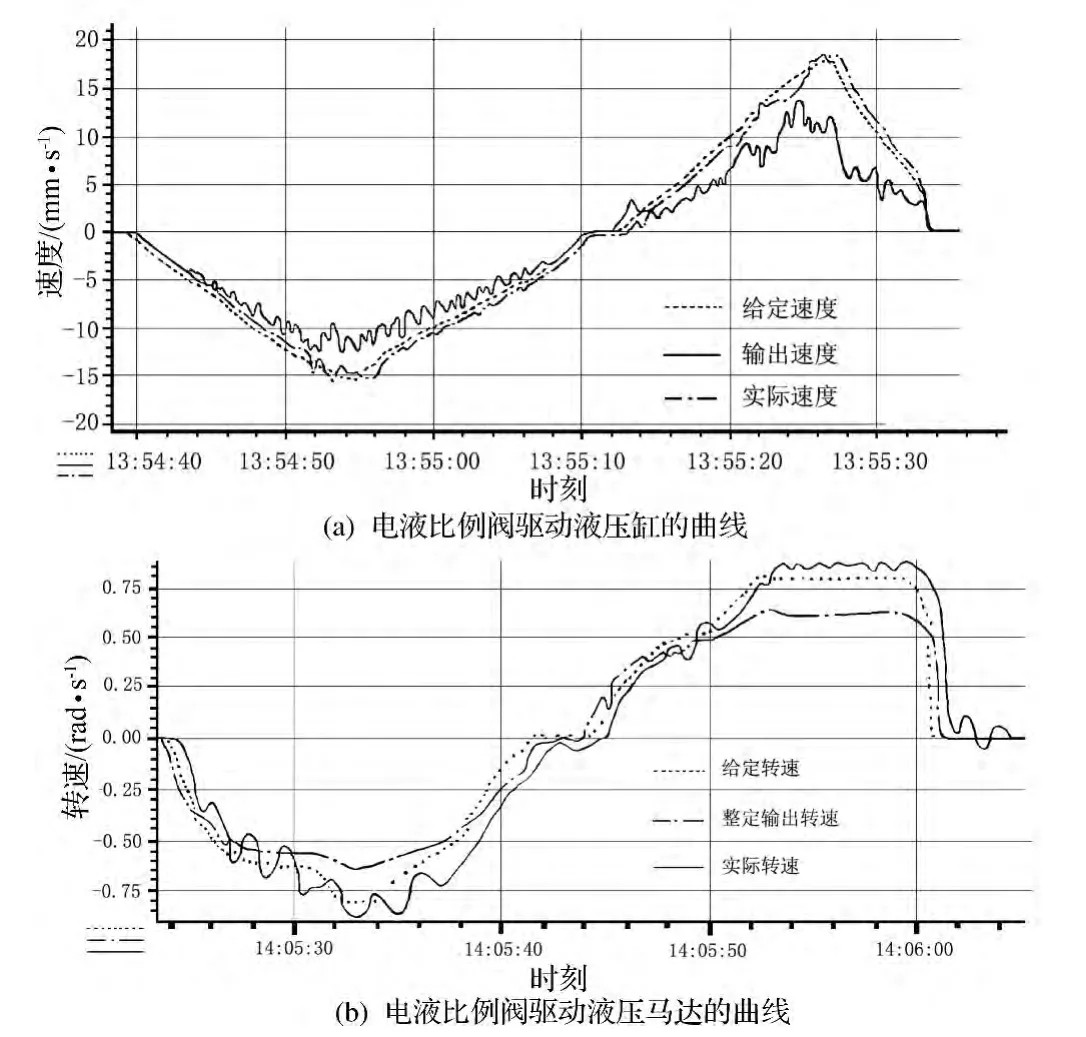
图4 定参数PID控制的曲线
常规定参数PID在控制液缸时,跟随能力基本满足控制需求,在个别时间点出现偏差较大,而在驱动马达的时候,绝大部分时间段的偏差均较大,不能满足控制需求。
采用单神经元网络在线整定进行现场调试时,当W1(0)的初值与其收敛值相差巨大时,且学习效率H,比例系数K设置又不合理,系统很难稳定,甚至出现剧烈震荡。需要根据PID的调节方法,先在比较低的K值下,调整出合适的 H,然后将此时的W1(k)作为初始值,按照该初始值进行PID参数整定,最后适当提高K值以提高算法随系统结构变化时的跟踪能力。经过调试,最终稳定后的PID参数如表1。
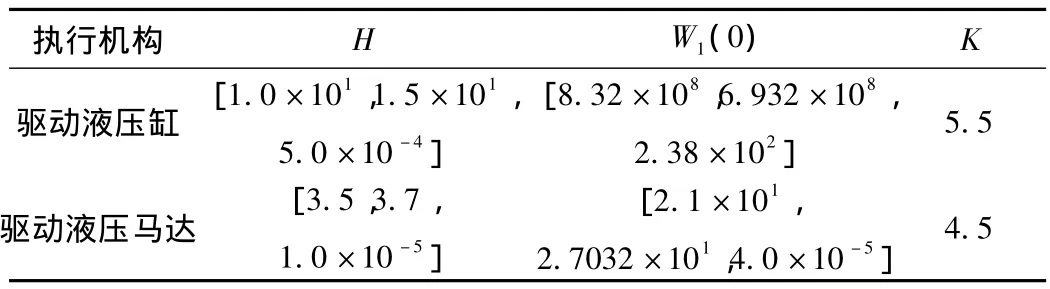
表1 应用参数
控制的运行结构如图5,从图中不难发现,无论是用来驱动液缸还是马达,实际速度都能跟随给定速度变化快速变化,误差基本稳定在很小的范围,没有出现震荡和严重超调的情况。
5 结束语
控制系统通常只能考虑机械运动学问题,而动力学问题太过复杂,无法在控制软件中进行精确建模,而依靠PID调节很容易达到控制要求。系统在现场经过反复运行发现,采用定参数PID控制电液比例阀驱动执行机构具有不稳定性,在一定情况下,调整好三个参数,系统基本能保持较好的跟随能力,但是当机械系统的工作载荷或机械的姿态发生较大变化后,则会导致系统的跟随速度变慢活着进入不稳定状态。采用单神经元网络算法在线PID参数整定后,在调试初期,能比较容易确定出系统稳定运行的最佳参数,使控制系统自动收敛,PID的三个参数权值也会随着变化保证系统的收敛速度和稳定性,达到系统应用要求。
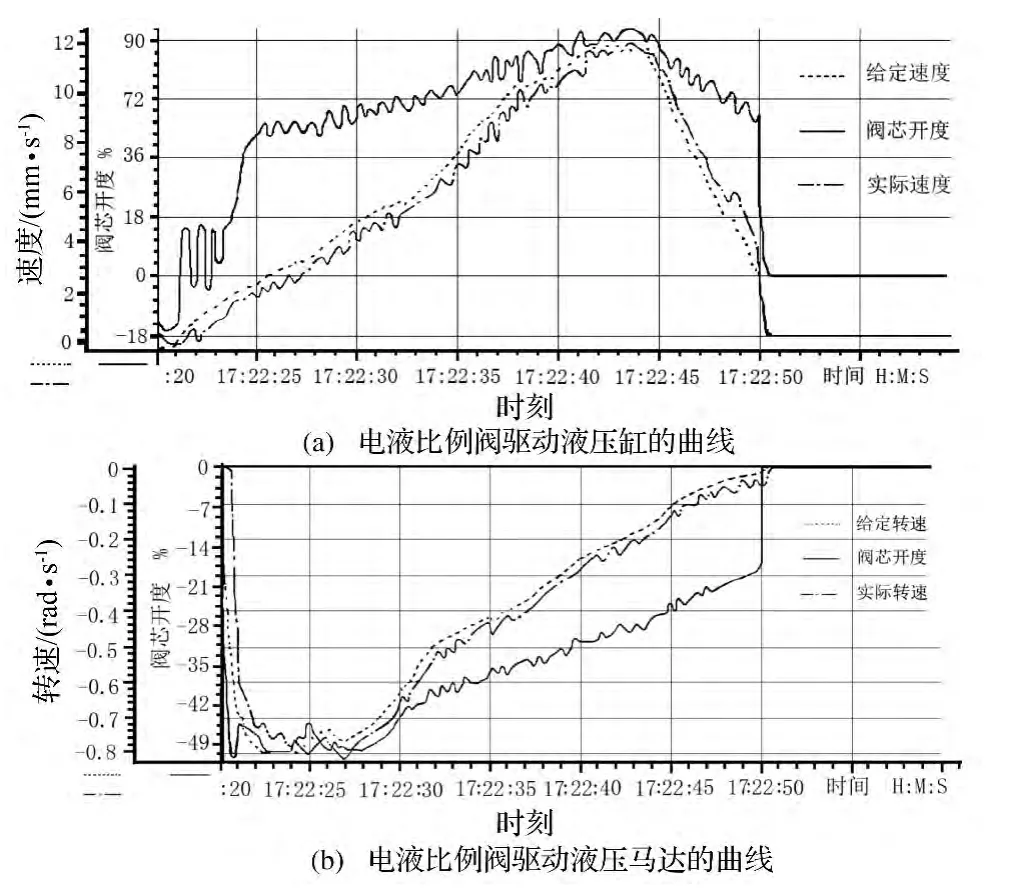
图5 采用单神经元网络算法在线PID参数整定的控制结果
[1]DR MOHAMMED Y HASSAN,DR MAJID A.Aliewe modeling and control of proportional directional control valve using neural network[J].Iraqi Journal of Computers,Communication and Control and Systems Engineering.2006,6(3):81.
[2]JOVANOVIC M.Nonlinear control of an electro hydraulic velocity servo system[C].Anchorage,Alaska,USA,American Control Conference(ACC)02,2002:588.
[3]BORA ERYILM AZ.Improved nonlinear modeling and control of electro hydraulic systems [D]. Boston, Massachusetts:Northeastern University,2000:12-40.
[4]张弓,于兰英,吴文海,等.电液比例阀的研究综述及发展趋势[J].流体机械,2008,36(8):32-37.
[5]郭宏广,冯开林.工程机械电液比例阀的特点及其应用研究[J].工程机械,2003,40(5):40-42.
[6]DU HAI-PING,ZHANG NONG.Static output feedback control for electro-hydraulic active suspensions Via T-S fuzzy model approach[J].Journal of Dynamic Systems,Measurement and Control:Transactions of ASME,2009,131(5):051004-1 –051004-11.
[7]黄合成,韩轶霞.基于电液比例阀的模糊智能PID控制系统的研究[J].试验技术与实验机.2007.7(4):56-60.
[8]JIMOH OLAREWAJU PEDRO,Olurotimi akintunde dahunsi,neural network based feedback linearization control of a ssrvo-hydraulic vehicle suspension system[J].Int.J.Appl.Math.Comput.Sci.,2011,21(1):137-147.
[9]DU HAI-PING,ZHANG NONG.Multi-objective static output feedback control design for vehicle suspensions[J].Journal of System Design and Dynamics.2008 2(1):228–239.
[10]刘金锟.先进PID控制及其MATLAB仿真[M].3版.北京:电子工业出版社,2013.
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
化工管理(2021年7期)2021-05-13
装备制造技术(2020年3期)2020-12-25
现代装饰(2018年5期)2018-05-26
小学生导刊(2017年15期)2017-05-17
棋艺(2016年4期)2016-09-20
中国塑料(2016年3期)2016-06-15
专用汽车(2016年4期)2016-03-01
中国生化药物杂志(2015年4期)2015-07-07
弹箭与制导学报(2015年1期)2015-03-11
