
基于飞轮电池的应急备用电站充电控制系统研究
2015-12-15 10:45赵中玉孙晓静刘文莉
电气自动化 2015年2期
赵中玉,孙晓静,刘文莉
(1.兰州理工大学技术工程学院,甘肃 兰州 730050;2.兰州电源车辆研究所有限公司,甘肃 兰州 730050;3.兰州工业学院,甘肃 兰州 730050)
0 引言
目前应急备用电站发电技术已经相当成熟,并已广泛应用,但由于其实现市电到应急备用电站切换过程中不间断供电的是使用化学电池,造成充电时间长、占据空间大、使用寿命短、对环境造成污染等问题。而飞轮电池克服了这些问题,已经成为目前研究的热点[1-4]。
飞轮电池是一种机电能量转换装置,其能量的转换主要是通过双向电动机/发电机、整流/逆变电力电子控制系统来实现的。其中双向电机可供选择的有五种[5]:即感应电机、开关磁阻电机、“写极”电机、永磁无刷直流电机和永磁同步电机。目前,国内外对飞轮电池的应用研究主要是针对感应电机和永磁无刷直流电机及其控制系统的研究[6-8],但由于前者转速不能太高;转子转差损耗大;而后者工作磁场是步进式旋转磁场,很容易产生脉动,同时伴有较大噪声。因此本文将采用转矩脉动小、噪声低,即具有交流电机的结构简单、运行可靠,又具有直流电机的运行效率高、无励磁损耗的永磁同步电机(Permanent Magnet Synchronous Motor,简称PMSM)来作为飞轮电池的驱动电机。电力电子装置采用电路简单,能实现能量双向流动的双PWM变流器方式。
由于PMSM是一个多变量、强耦合、非线性系统,在实际应用中,受外界干扰及内部摄动等不确定因素影响,传统PI调节器很难满足高性能控制要求[9-10]。因此提出了一种基于滑模变结构的快速充电控制策略,并通过MATLAB/Simulink仿真试验,验证了该控制策略的正确性。
1 系统结构
基于飞轮电池的应急备用电站主要由市电电网、应急备用电站、飞轮电池及整流/逆变装置组成,其系统结构如图1所示。

图1 系统结构示意图
图中ATS的作用是保证电网在任何情况下只有一路交流电输出;静态开关的作用是由电网供电旁路切换至飞轮电池供电。由于静态开关选用的是快速晶闸管,其接通时间只有微秒级,因此依靠这种技术,可以对负载实现由市电到应急备用电站转换时的不间断供电。
2 充电模式下电网侧PWM变流器控制
图2为连接在电网侧的三相电压型桥式PWM变流器结构图。其控制方式采用的是直接电流控制,以实现PWM整流电路工作时功率因数近似为1的控制;控制方法为滞环电流控制,其控制框图如图3所示。
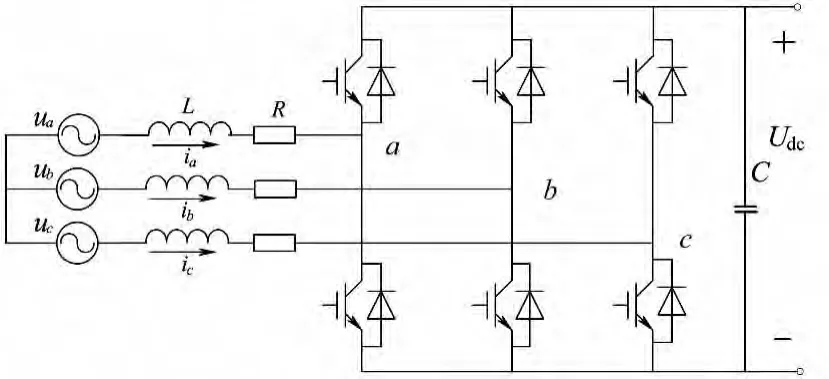
图2 电网侧PWM变流器结构图
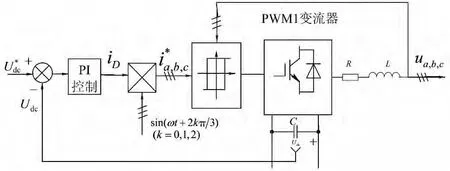
图3 控制系统结构框图
图3 中的控制系统是一个双闭环系统,其外环为直流电压控制环,内环为交流电流控制环。由于分别是和各自的电源电压同相位、其幅值和反映负载电流大小的直流信号iD成正比,因此可实现PWM1变流器的单位功率因数运行。
3 充电模式下飞轮电池侧PWM变流器控制
图4为连接在飞轮电池(永磁电机)侧的三相桥式PWM变流器。
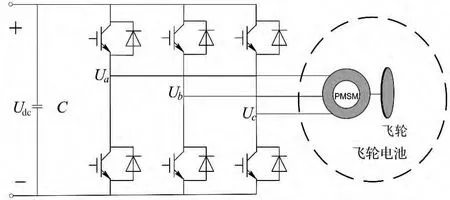
图4 飞轮电池侧PWM变流器结构图
3.1 永磁同步电机数学模型
永磁电机在dq轴的数学模型主要由电压方程、磁链方程、转矩方程和运动方程组成。引入回转器理论,其在dq轴下的简化等效电路如图 5 所示[11]。图中 pnψfωm= ωrψf。
电路的电压、磁链及转矩方程如式(1)、(2)、(3):

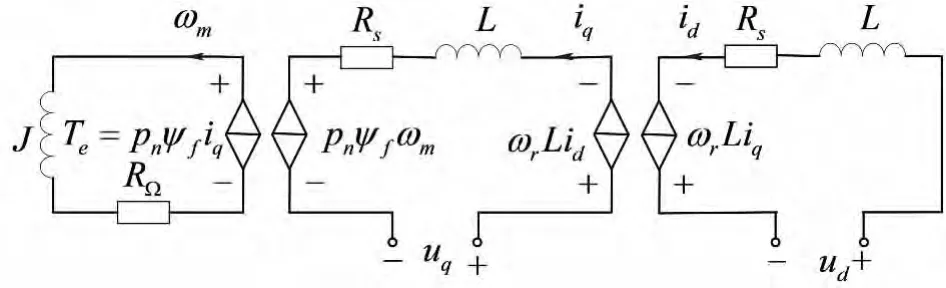
图5 飞轮电池充电时的等效电路图

这里ud,uq,id和iq表示永磁同步电机在q轴、d轴的电压和电流;L=Ld=Lq表示定子线圈在d、q轴的电感;p是微分算子;Rs是定子电阻;ωr、ωm是电磁和机械旋转速度;Te是电磁转矩;pn是极对数;ψf是磁通;J是飞轮转动惯量;RΩ是磨擦因数。
3.2 磁场定向矢量控制策略研究
飞轮电机侧PWM变流器采用的是磁场定向矢量控制方式[12],即id=0,如图6。此方式无电枢反应的去磁作用,输出力矩与定子电流成正比,控制最为简单。
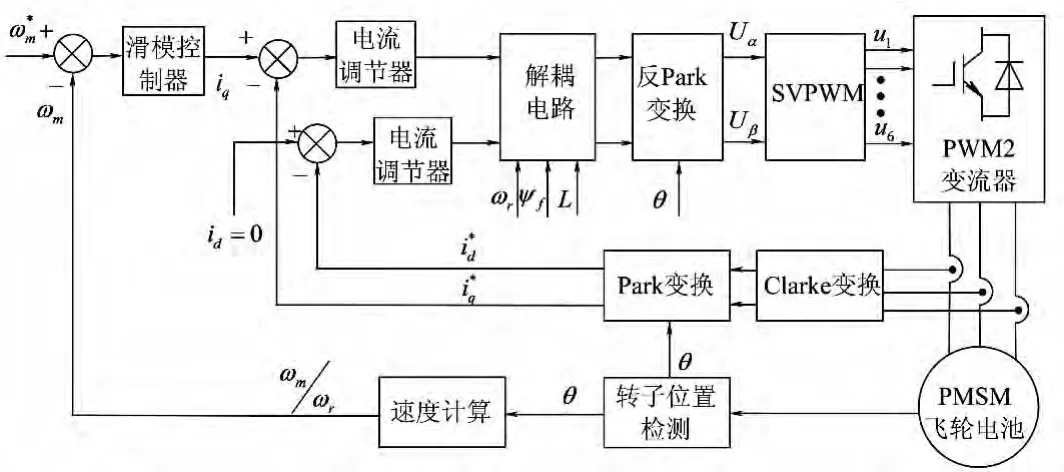
图6 飞轮电机侧PWM变流器控制策略
根据转子速度与给定速度比较后经由滑模控制器输出控制转矩的电流信号iq,id、iq经过电流PI调节器及电流内环的解耦电路(采用式⑴)得到电压给定,经反Park变换产生SVPWM的控制电压Uα和Uβ。
3.3滑模变结构控制器设计
(1)控制器设计
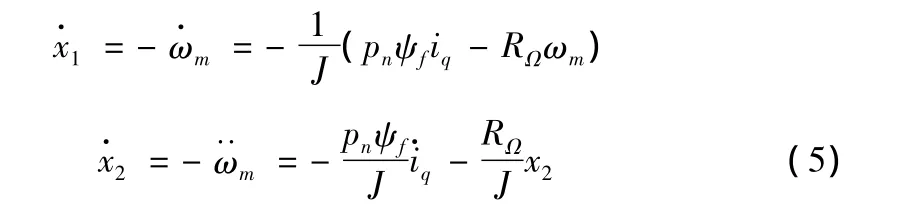
取PMSM系统的状态变量为:

结合式(2)和(3)得:

设计系统的滑模面s为:

对s求偏导有:

由指数趋近律法,得:

式中 ε >0、k>0。

最后由式(10)得:

由式(11)可以看出,求解较为简单,易于软件编程实现。
(2)稳定性分析
利用Lyapunov稳定性理论分析。选择Lyapunov函数为:

对其求导得:

系统一旦进入滑模面(s=0),即进入滑模控制状态。可得滑模控制下的运动微分方程:

解此方程得:

式中c为常数。当t→∞时,x1沿指数趋于零,即能无超调的实现转速跟踪。此时,系统的品质完全由开关面的参数c决定,而与系统的参数及扰动无关,其稳定时间也只与c有关,因而具有很好的鲁棒性和快速性。
4 飞轮充电系统仿真
应用MATLAB仿真软件,在Simulink中建立了系统的仿真模型,并对其进行了仿真验证。
4.1 电网侧PWM变流器控制系统仿真
系统采用图3所示的控制方案。图 7为直流侧电压仿真波形。图8为电网侧 电 压/电流仿真波形。
图7中显示仿真开始后直流侧电压迅速上升到给定值,在1 s发生负载扰动时,由于电压闭环的作用,直流电压经过短暂下降后迅速恢复到给定值。图8为电网侧PWM变流器输入电压和电流仿真波形,可看出网侧输入电压和输入电流基本保持在同一相位,系统工作在单位功率因数状态。负载增大时,电流的幅值迅速增大,系统的动态响应好。
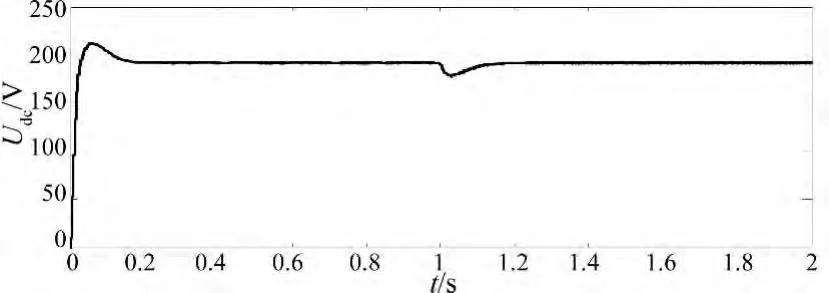
图7 直流侧电压仿真波形
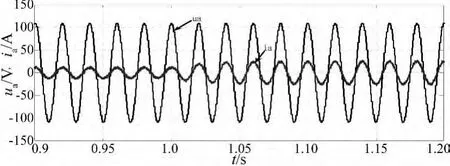
图8 交流侧电压/电流仿真波形
4.2 飞轮电池侧PWM变流器控制系统仿真
系统采用如图6所示的控制方案。速度调节器采用滑模变结构控制器或PI控制器。图9和图10分别为PI控制和滑模变结构控制下的飞轮电池起动时的转速、转矩和三相电流响应波形,给定转速为1 500 r/min。
从仿真波形中可以看出,在 PI作用下,系统起动存在超调,并有一定的调节时间,而在滑模变结构控制下,系统能够很快的抑制超调量,并达到转速给定,具有较强的快速性和鲁棒性。
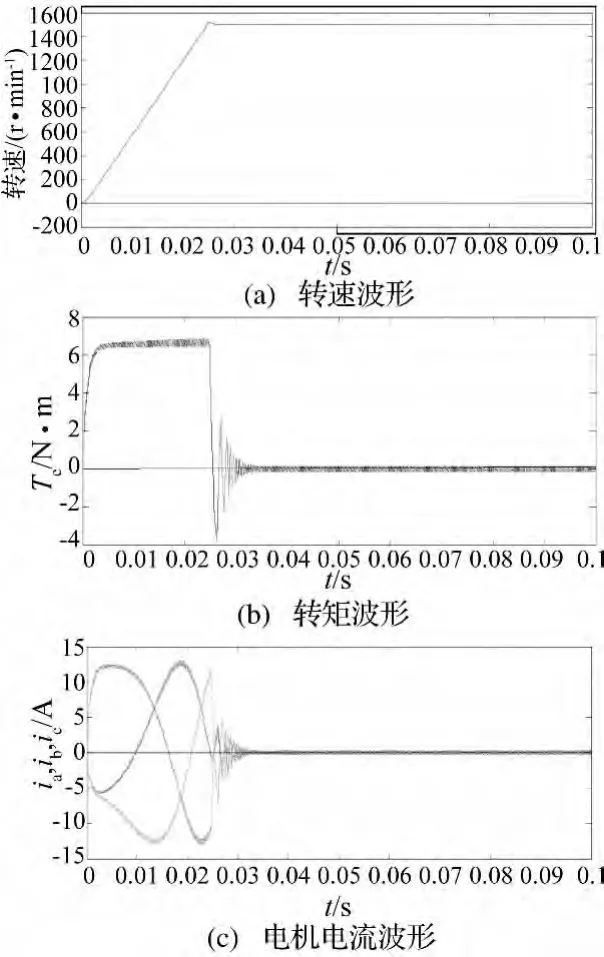
图9 PI控制

图10 滑模变结构控制
5 结束语
本文针对飞轮电池在应急备用电站中要求快速充电的特点,采用直接电流控制实现了网侧PWM变流器的单位功率因数运行;同时设计了一种简单易行的变参数趋近律滑模速度控制器,并将其与传统PI控制器进行了仿真比较。研究结果表明,所设计的滑模变结构控制器算法简单,易于软件实现;系统响应快,对转速超调有明显的抑制;对系统内部参数摄动、外部干扰等不确定性具有较强的稳定鲁棒性和抗干扰性,满足飞轮电池快速充电的要求。
[1]GEORGE N PRODROMIDIS,FRANK A,COUTELIERIS.Simulations of economical and technical feasibility of battery and flywheel hybrid energy storage systems in autonomous projects[J].Renewable Energy,2011,39(1):149-153.
[2]ARGHANDEH R,PIPATTANASOMPORN M,RAHMAN S.Flywheel energy storage systems for ride-through.applications in a facility microgrid[C].IEEE Transactions on Smart Grid,2012,3(4):1955-1962.
[3]BITTERLY J G.Flywheel technology past,present,and 21stcentury projections[J].IEEE AES Systems Magazine,1998,13(8):13-16.
[4 ]CHEN JUNLING,JIANG XINJIAN,ZHU DONGQI,et al.A novel uninterruptible power supply using flywheel energy storage unit[C].Power Electronics and Motion Control Conference,2004,3(8):1180-1184.
[5]汤双清.飞轮储能技术及应用[M].武汉:华中科技大学出版社,2007.
[6]陈峻岭,姜新建,朱东起,等.基于飞轮储能技术的新型UPS的研究[J].清华大学学报,2004,44(10):1321-1324.
[7]王健,康龙云,曹秉刚,等.新能源分布式发电系统的控制策略[J].太阳能学报,2006,27(7):704-708.
[8]KAIROUS D,WAMKEUE R.DFIG-based fuzzy sliding-mode control of WECS with a flywheel energy storage[J].Electric Power Systems Research,2012,93:16-23.
[9]方斯琛,周波,黄佳佳,等.滑模控制永磁同步电动机调速系统[J].电工技术学报,2008,23(8):29-35.
[10]汪海波,周波,方斯琛.永磁同步电机调速系统的滑模控制[J].电工技术学报,2009,24(9):71-76.
[11]AKAGIANDH H.SATO:Advanced high-speed flywheel energy storage systems for pulsed power application[J].IEEE Transactions on Power Electronics,2008,17(1):109-116.
[12]韩金刚,陈昆明,汤天浩.半直驱永磁同步风力发电系统建模与电流解耦控制研究[J].电力系统保护与控制,2012,40(10):110-115.
猜你喜欢
模具制造(2019年7期)2019-09-25
表面工程与再制造(2019年3期)2019-09-18
电子制作(2019年10期)2019-06-17
中国惯性技术学报(2019年6期)2019-03-04
测控技术(2018年4期)2018-11-25
测控技术(2018年3期)2018-11-25
北京航空航天大学学报(2017年4期)2017-11-23
中国自行车(2017年11期)2017-04-04
电测与仪表(2016年8期)2016-04-15
通信电源技术(2016年4期)2016-04-04
