
GPS精确定位技术在小湾水电站工程变形测量中的应用
2015-12-14 01:51余记远杨金玲赵志勇杨明龙邹兴宏
测绘工程 2015年4期
陈 豪,余记远,杨金玲,赵志勇,杨明龙,王 川,邹兴宏
(1.河海大学,江苏 南京 210098;2.华能澜沧江水电有限公司,云南 昆明 650214;3.黑龙江工程学院,黑龙江 哈尔滨150050;4.中国电建昆明勘测设计研究院有限责任公司,云南 昆明650051;5.昆明理工大学,云南 昆明650091)
小湾水电站位于云南省境内,系澜沧江中下游梯级开发规划中的第二级,工程属大(I)型一等工程,由混凝土双曲拱坝、坝后水垫塘及二道坝、左岸泄洪洞和右岸地下引水发电系统组成。电站以发电为主,兼有防洪、灌溉等综合功能,装机容量4 200MW,于2010年8月全部投产。水库总库容150亿m3,具多年调节能力,2012年10月首次蓄至正常蓄水位。
鉴于小湾电站规模大、大坝高等特点,电站建立了全国规模最大的水电工程安全监测系统,共计安装埋设监测仪器10 761部(台)。在遵循“实用、可靠、先进、经济”原则,满足国家法律、现行规范和工程建设运行管理要求基础上,小湾电站在10余年的建设期间审慎使用部分具有国内领先水平的新型安全监测技术,其中GPS精确定位技术作为传统外部变形监测的有效补充和验证手段,先后应用于电站枢纽区工程边坡、大坝和水库库岸滑坡体的变形监测,提供持续可靠的监测数据,充分满足电站建设期、蓄水期和运行期的工程安全监测需要,切实达到指导施工、反馈设计、保障安全的目的。
1 枢纽区工程边坡GPS一机多天线变形测量系统
小湾电站坝址区左岸坝肩上游为2号山梁,下游为饮水沟堆积体,于2002年3月开始边坡开挖支护。2003年12月开挖至EL.1 276m后边坡变形出现异常,2004年1月持续降雨后变形加剧。堆积体边坡一旦整体失稳将严重影响工程建设,因此电站建设各方在全力加固抢险堆积体边坡的同时,投入包括GPS一机多天线变形测量系统在内的各类安全监测技术手段,提供失稳预警保障和指导抢险施工。
1.1 系统架构与组成
GPS一机多天线变形测量系统由数据采集、监控中心、数据通讯三部分组成。数据采集由16个监测点和2个监测站组成,包括设在右岸监理中心山梁的基准点B1和左岸业主营地5#楼顶的基准点B2,14个布置于2号山梁EL.1 250~EL.1 500m边坡各层马道上的监测点,见图1。GPS接收天线安装在设有强制对中装置和保护罩的砼监测墩上,通信天线及供电电缆穿管保护,2个基准点和位于2号山梁EL.1 480m、EL.1 330m马道上的1#、2#监测站各配置1台型号为DL-MILLEN-RT2的NOVATEL双频接收机。监控中心设在业主营地,包括数据服务器和工作机,接收监测数据后进行计算分析。数据通讯主要采用GPRS无线传输技术,采集端和接收端定时收发GPS实时监测数据。
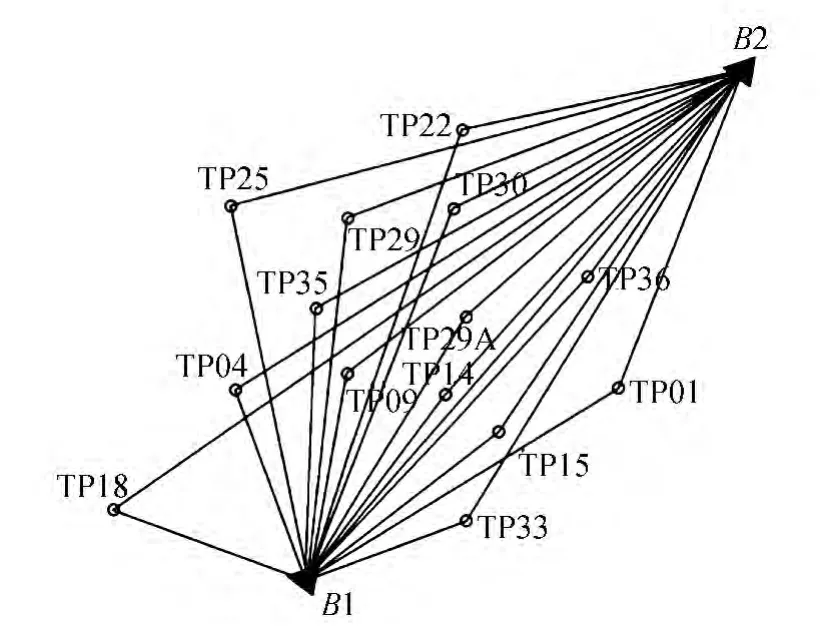
图1 测点布置示意
1.2 技术特点
1)采用一机多天线技术。一机多天线技术符合当时GPS成套设备购置费用高,大量测点布设条件下,有效降低系统建设成本的需求。除基准点外,其余监测点分别以6点和8点为单元,各单元测点共用1台GPS接收机,接收机通过信道控制器与各测点GPS接收天线连接,信道控制器根据定制任务和时间转换信道连通测点GPS天线,连续轮回接收各测点的GPS数据,监测数据同时存储于接收机和控制器内,见图2。

图2 GPS一机多天线系统组成
2)选用适应一机多天线和边坡表面变形监测的GPS定位模式和坐标解算方式。采用静态相对定位模式,各测点监测时段1~2h,数据采样间隔5s,卫星高度截止角为15°,采集过程加入天线对应的测站信息,并将数据发回到监控中心。基准站的数据直接发回到控制中心;监控中心的服务器通过GPRS无线传输接收监测数据,在区分归类各测点数据后,进行以单历元解算为主的站心坐标解算,将各测点通过GPS精确定位获取的WGS-84三维坐标转换为以基准点B1为原点的站心地平坐标系,即X轴正向指北,Y轴正向指东,H 轴指向垂直方向,与电站枢纽区江段近北南走向和边坡整体位移方向基本吻合,使各测点站心地平坐标变化量可以直观反映边坡位移情况。
1.3 监测成果对比
系统自2004年6月至2009年5月共运行5年,整体运行率达到80%以上。由于GPS测量存在多路径效应、电离、平流层影响等无法完全消除的误差,使得GPS监测数据在真值附近跳动,使用多项式对GPS观测值进行拟合、滑动平均等方法对变形趋势进行模拟。采用Huber权函数的稳健迭代权法进行粗差的定位,并将探测出的粗差的权降低。由图3可见,典型GPS测点与其附近的表观点水平合位移监测成果趋势相同,但因GPS点与表观点平面位置未完全重合,且两种测量手段的误差 影响和监测时段不同,因此变形量有所差异。
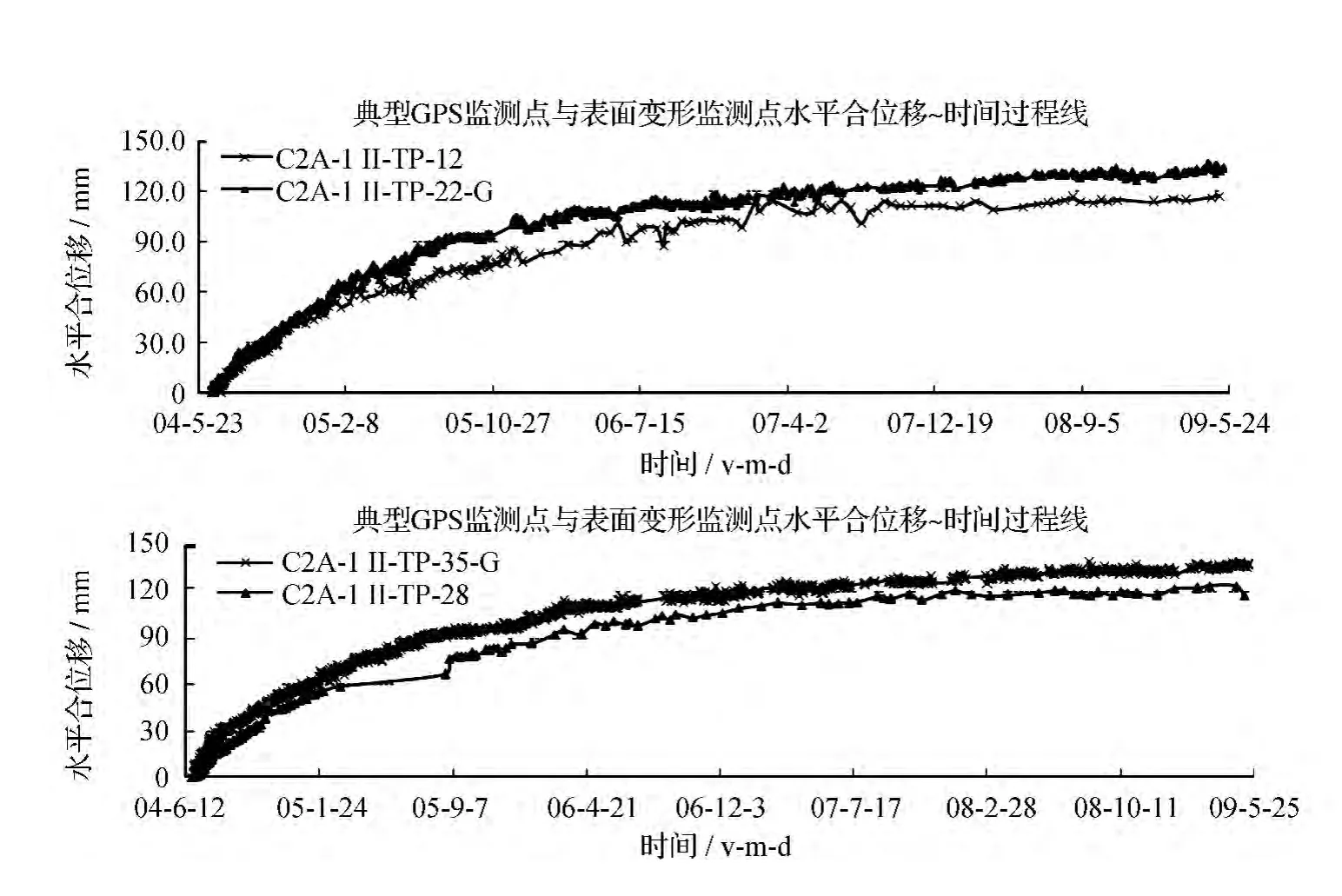
图3 2#山梁典型GPS测点与表面变形监测点水平合位移对比
2 混凝土双曲拱坝坝顶GNSS变形测量系统
小湾电站混凝土双曲拱坝最大坝高294.5m,由43个坝段和1个推力墩组成,是全球首座300m级特高拱坝。由于坝体较薄,坝基地质条件复杂,坝上承受水荷载较大等因素导致坝体变形情况非常复杂,因此小湾拱坝除在重点坝段布设分段垂线,所有坝段分高程布置坝后马道表观点等传统变形监测设备外,还在坝顶选取了15个坝段分别安设了GNSS监测点,实时监测坝顶的水平位移和垂向位移。
2.1 系统架构与组成
坝顶GNSS变形测量系统由数据采集、数据传输、数据控制及分析、防雷、供电5部分组成。数据采集包括分别设在左岸EL.1 380m高缆平台上游侧和右岸西北监理楼顶的2个基准点,及大坝坝顶9#、15#、22#、25#、29#等15个主要坝段各1个测点,共计15个监测点,见图4。单机单天线结构,采用Leica公司的AR25 3D扼流圈天线、GMX902GG双星双频接收机,天线、避雷针安置在监测墩顶部,接收机则安置在测墩下部的设备箱内。监控中心设在右岸坝下游的中控楼内,包括数据分析存储服务器和工作站,使用Leica专业Spider软件用于数据采集、管理和计算,GeoMos软件用于数据分析和系统集成。数据传输采用光缆和微波两套系统,保证通讯可靠性。
2.2 技术特点
1)采用可扩充接收多星座导航定位信号的GNSS系统。招标设计阶段小湾拱坝拟采用GPS一机多天线变形监测系统,技施阶段根据GPS监测技术发展及电站运行需要,改为单机单天线GNSS变形监测系统,采用全球首款高精度支持多星系统的GMX902监测型接收机,目前以接收美国GPS信号为主,俄罗斯GLONASS信号为辅,并预留欧盟Galileo和我国北斗二代信号通道。支持多星系统意味着同一时刻接收机可接收到定位信号的卫星颗数将达到单一GPS系统的两倍甚至四倍,在定位精度进一步提高的同时,载波信号解算时长将大幅缩短。此外西南高山峡谷地区因可视空域狭窄导致卫星失锁的几率也将降低,提高极端气候条件下GNSS变形监测系统的运行保证率。
2)完善的变形监测互补校验设计。为满足不同监测系统数据成果的互补互验,确保GNSS监测系统的可靠性,将接收机天线和360°全向光学棱镜分层安置在监测墩顶的同轴强制对中架上,见图5。使用TM30全站仪定期对全向棱镜进行前方交会法人工测量,并与同期的GNSS监测数据进行对比分析。
3)有效克服临近大水体多路径效应影响。为有效削弱坝前水库大面积水体引发的无线电信号多路径效应影响,使用AR25 3D多频多星扼流圈天线。该天线提供亚毫米相位中心精度,并抑制无线电信号干扰,相比传统2D天线更具优异的低高度角卫星跟踪性能,见图6。

图4 坝顶GNSS变形测量监测系统架构

图5 坝顶GNSS测点
4)选用了适应拱坝坝体变形监测的GPS定位模式和坐标解算方式。2个基准点与小湾电站专一等平面变形监测控制网进行联测,使GNSS监测成果与小湾大坝传统外部变形监测成果全面统一。系统采用双基站静态相对定位差分模式,采用12~24h监测数据解算每条基准点至监测点的基线,得到各监测点的坐标,且每个基准点均能分别计算坝顶测点变化,便于测点数据互相检验。最终监测成果转换成小湾拱坝坐标系,根据各坝段坝轴线与拱坝中心线的方位角,换算成适应各坝段轴线方向的径向和切向位移。
2.3 监测成果对比
系统于2011年10月27日正式投运,至目前已历经3个水库蓄放周期,运行工况良好。布点坝段中9个设有垂线监测,其余与坝顶表观点重合,因此坝顶表观点与坝体垂线监测资料均可作为GNSS监测成果对比依据。选取上述3个监测系统2011年11月9日测值作为相对初值进行比较。由图7、图8可见,主要特征水位下GNSS与表观点、垂线径向、切向监测成果趋势相同,测值基本一致,较为吻合,均符合拱坝随库水荷载增减的变形规律。径向:库水位上升荷载增大,坝体向下游变形,库水位消落荷载减小,坝体向上游变形,径向变形从河床坝段向岸坡坝段逐渐减小;切向:库水位上升,各坝段呈现向两岸岸坡方向变化趋势,库水位下降,各坝段呈现向河床方向变化趋势,切向变形基本对称。
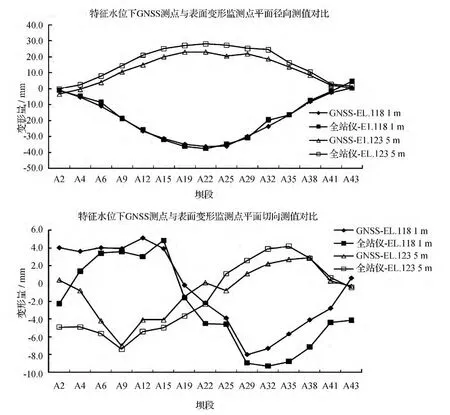
图7 特征水位下坝顶GNSS测点与表观点平面径向与切向测值对比
3 水库库岸滑坡体GNSS变形测量系统
2008年12月19日小湾水库开始蓄水,至2012年10月首次蓄至正常蓄水位,在澜沧江干流和黑惠江支流分别形成回水长度为178km和123km的水库。2009年8月和2010年6月水库蓄水期间分别发现黑惠江支库距坝址3.2km八字耳朵库段和澜沧江主库距坝址3km小水井库段岸坡存在失稳趋势。因距离枢纽区较近,2011年6月在上述滑坡体上布设了表观点,定期监测。2012年4月在两个滑坡体上投运GNSS监测点,提高滑坡监测预警实时性。
3.1 系统架构与组成
水库滑坡体GNSS系统架构与坝顶GNSS系统相同,并共用左岸高缆平台基准点和右岸中控楼监控中心。两个滑坡体主监测剖面上各布设4个GNSS测点。接收机选用性价比较高的徕卡GMX901单频监测一体型,满足滑坡低频度GPS监测需要。天线和接收机整合封闭在碟形保护罩内。因测点距监控中心较远且滑坡体上布线困难,测点采用太阳能供电,数据传输采用无线形式,各测点上安装定向无线网桥,通过澜沧江右岸的无线中继站将监测数据传输至监控中心,见图9。

图9 水库滑坡体GNSS变形监测系统平面布置与系统架构
3.2 技术特点
1)采用可扩充接收多星座导航定位信号的GNSS系统。与坝顶GNSS系统相同支持多星系统,提高高山峡谷地区滑坡GNSS监测系统的定位精度和可靠性。
2)适应滑坡变形监测的单测点独立单元形式。由于滑坡体自身的不稳定性,且由于距离远、布点广等原因,GNSS监测点都采用独立单元形式,即每个测点配置GMX901一体型接收机、太阳能野外供蓄电设备、避雷接地设备和无线通讯设备各一套,使每个测点可以独立完成数据采集工作,而不受滑坡体局部失稳造成个别测点破坏的连带影响,有效提高全套数据采集系统的存活率。
3.3 监测成果对比
八字耳朵和小水井滑坡体距左岸缆机平台基准点都约3km,各测点和基准点分别组成基线,通过后处理解算方式获得各测点24h高精度三维定位坐标,然后输入GeoMoS工作站进行滑坡变形分析。实际监测过程中,将滑坡体GNSS测点与使用全站仪对岸前方交会法测得的位于附近的表观点监测数据进行对比,八字耳朵滑坡体GNSS测点与表观点监测成果趋势相同,但因两类测点平面位置未完全重合,因此变形量有所差异;小水井滑坡体GNSS测点与表观点监测成果则趋势与测值完全一致,见图10。

图10 水库滑坡体典型GNSS测点与表面变形监测点水平合位移对比
4 结束语
小湾水电站成功将GPS精确定位技术应用于工程边坡、大坝和水库滑坡体的外部变形监测,作为传统外部变形监测的有力补充和验证手段,为电站建设、蓄水和运行期的工程安全提供可靠保障。
从一机多天线到大坝坝顶和水库滑坡GNSS系统,GPS变形监测系统在整个应用过程中不断优化改进,使系统对各类型工程外部变形监测的适用性不断加强,数据获取质量、运行保证率和系统建设性价比持续提升。特别是大坝坝顶GNSS变形测量系统是国内首个成功应用于高山峡谷地区的非直线坝型的GNSS监测系统,系统构建和运行中总结和积累的经验,为后续GPS精确定位技术在糯扎渡、金安桥、观音岩等大型水电站大坝变形监测提供借鉴和示范。
[1]徐绍铨.GPS测量原理及应用[M].武汉:武汉大学出版社,2003.
[2]董泽荣.小湾水电站高边坡安全稳定监测综述[J].水力发电,2004,30(10):74-78.
[3]何秀凤.GPS技术在水电工程中的应用及展望[J].水电自动化与大坝监测,2002,26(4):6-9.
[4]肖胜昌,王冲.GPS一机多天线实时监测系统在小湾水电站中的应用[J].水力发电,2014,32(11):22-27.
[5]王川,杨珊珊,董泽荣.GNSS监测系统在小湾拱坝安全监测中的应用[J].水电自动化与大坝监测,2013,37(1):63-67.
[6]陈豪,朱大明,杨金玲.GPS应用于高空施工机械安全监控初探[J].测绘工程,2008,17(2):43-47.
[7]岳顺,翟长治,李小奇.基于小波分析的动态GPS监测序列噪声分析[J].黑龙江工程学院学报,2014(1):30-33.
[8]罗和平,邱蕾.利用载波相位平滑伪距分析深圳市电离层变化规律[J].测绘工程,2014,23(2):54-56.
[9]鲍建宽,范兴旺,高成发.4种全球定位系统的现代化及其坐标转化[J].黑龙江工程学院学报,2013(1):36-40.
猜你喜欢
中国农村水利水电(2022年10期)2022-10-27
科学技术创新(2022年11期)2022-04-20
华中建筑(2022年4期)2022-04-14
浙江水利水电学院学报(2022年1期)2022-04-14
陕西水利(2021年8期)2021-09-15
水利科技与经济(2020年6期)2020-06-23
中国农村水利水电(2020年5期)2020-06-15
山东工业技术(2017年24期)2017-12-29
西南交通大学学报(2016年6期)2016-05-04
科技视界(2014年33期)2014-01-02
