无线传感器网络在矿山微震定位系统中的应用
2015-12-10 11:26:41薛强,叶明,范君菲
石家庄铁道大学学报(自然科学版) 2015年2期
无线传感器网络在矿山微震定位系统中的应用
薛强1,叶明2,范君菲3
(1.石家庄铁道大学 电气与电子工程学院, 河北 石家庄050043; 2.河北省科学技术馆, 河北 石家庄050000;
3.北京铁路局 石家庄职工培训基地, 河北 石家庄050000)
摘要:针对传统矿山定位监测系统中有线方式成本高、资源浪费、可操作性差等问题,将无线传感器网络技术应用于矿山微震定位。通讯系统采用由末端网络节点和中心节点构成的星形无线传感器网络结构。应用时钟同步技术,末端节点将矿震信号通过射频模块上传给中心节点,进而通过上位机完成对数据的进一步处理。该系统为无线通信在矿山越界开采监测中的应用研究。
关键词:无线传感器网络;数字信号处理;无线通信;时钟同步
中图分类号:TN98文献标志码: A
收稿日期:2014-01-15责任编辑:刘宪福DOI:10.13319/j.cnki.sjztddxxbzrb.2015.02.20
作者简介:薛强(1977-),男, 讲师,研究方向为数字信号处理与模式识别,电能质量测量。E-mail: xueq77@163.com
基金项目:河北省国土资源厅项目(200903)

薛强,叶明,范君菲. 无线传感器网络在矿山微震定位系统中的应用[J].石家庄铁道大学学报:自然科学版,2015,28(2):102-105.
0引言
越界开采行为是当前我国矿产资源开采中普遍存在的“顽疾”。执法部门应加大对越界开采违法行为的打击力度,维护矿产资源开采秩序,并依法处罚违法主体。在采用炮采开矿的矿山中,利用矿山开采时所产生的微震信号对震源进行定位,是执法部门获取越界开采证据的重要手段。但是,目前很多研究中大型矿山的监测定位系统采用有线传感器方式采集矿山震动信号[1-2],这种有线方式降低了监测的实效性和可操作性,同时又加大了人力和财力的投入。
针对传统矿山矿震事件监测的特点,以无线通讯为核心技术,设计开发了适合于野外无人值守的无线传感器网络,并将之应用于矿山越界开采监测系统。该系统由无线传感器网络节点和中心站组成,传感器节点利用太阳能实现不间断供电,采集震动信号波形及震动波头到时参数,通过无线射频模块上传至中心站,位于中心站的上位机将结合接收到的各通道波形以及时间参数通过已有的定位算法计算得到矿山开采爆破震源的准确位置。该系统主要针对矿山越界开采监测而设计,并已将之成功应用于矿山越界开采在线监测系统当中;另外,系统所采用的太阳能供电方案以及无线通讯数据传输方式亦可应用于其它无人值守野外监测领域中。
1系统总体设计
系统总体硬件结构如图1所示。无线传感器网络采用星形网络,硬件结构由无线传感器网络节点和中心节点两部分构成。无线传感器节点主要为Cygnal公司的C8051F020单片机和以nRF905芯片为核心部件的射频模块RFC-30H。C8051F020单片机采用低功耗设计,25MIPS高速流水线结构,内嵌8通道的12位可编程增益放大器ADC,64K系统可编程FLASH存储器,4 352Byte片内RAM。nRF905射频模块RFC-30H工作于433MHz开放的ISM频段,工作电压为1.9~3.6V。系统中各节点采用太阳能电池供电,外部扩展了多路ADC输入口、前置信号调理模块、电源管理模块、时钟模块;中心站则包括了GPS授时模块、异步串行接口以及震源定位上位机系统等。
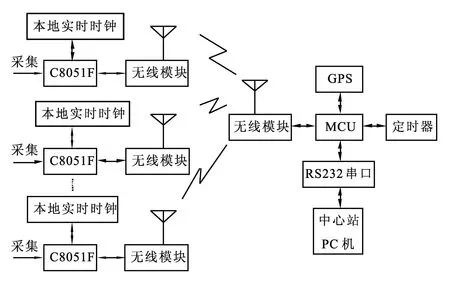
图1 无线传感器网络总体结构图
2同步管理机制
绝大多数的震源定位算法是根据精确提取的震动波到时来计算的,震动波到时时间标识是记录震动事件的关键参数,时间精度直接影响震源定位精度,如何保证多路信号的同步则是系统的必须考虑的问题之一。与此同时,由于每个节点都是完整独立的小系统,采用了相互独立的数字时钟来产生采样控制信号,而产生时钟频率的晶体易受外界环境温度、激励电平及晶体老化等多种不稳定因素的影响,使得晶体本身的时钟脉冲存在着不可避免的误差,从而造成不同节点同步测量数据的不同步。针对以上两点,本文提出将GPS结合无线电方式实现系统同步的管理机制[3]。
(1)中心站GPS授时系统。中心站的授时系统使用了两种类型的GPS时钟信号输出,分别是RS-232输出和1pps电平信号输出。一是RS-232输出,提取的时间信息与协调世界时UTC(国际标准时间)的同步误差不超过1ms;二是1pps电平信号,秒脉冲的上升沿对应输出的UTC时间,如图2所示。将UTC和1pps相结合能够得到准确的时间信息,且设计简单、实用。
GR87OEM板的串口1是异步串行数据输出,串口配置电平为RS-232电平,为了匹配C8051F020单片机I/O口的TTL电平,需要先经过MAX232转换后再进行通信,如图3所示。
秒脉冲电平信号直接连接C8051F的I/O口,通过1pps的上升沿触发单片机提取$GPRMC语句,得到精准的UTC时间,实现中心站的GPS精确授时。
(2)采集终端的时钟校准。各个终端节点装有本地实时时钟PCF8583定期的接收中心站发送过来的UTC时间信息,校准终端节点的实时时钟与接收到UTC时刻一致,最终实现以中心站的GPS时间为基准的全网时钟同步。
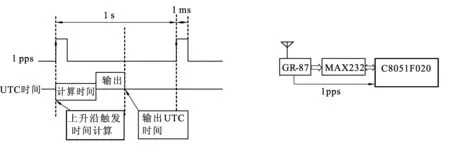
图2 1 pps与UTC时间关系图 图3 GPS与C8051F连接示意图
3无线通信设计
在无线数据传输中,对数据必须进行规定格式的编码才能有效的降低传输过程中的误码率。RFC-30H模块数据传输格式为依次由前导码、目标地址码、数据码、CRC校验码构成,其中数据码长度可以自行设置,最大设置为32 字节。在最长32 个字节数据中,为了完成系统的多项功能,将第一个字节设置为命令码,用于区分不同的功能命令,第二个字节为发送方地址码,在这里主站地址码设置为0,从站地址码设置为从1开始,依次加1,第三个字节开始依次为有效数据。

图4 nRF905数据发送接收流程图
数据发送流程图如图4(a)所示,nRF905通过ShockBurstTX模式发送数据,这时发送数据前禁止外部中断。发送数据流程为:首先将TRX_CE引脚置低,进入待机模式后,低速写入接收节点地址和待发送数据;然后再将TRX_CE引脚置高、TX_EN引脚置低,使其进入发送模式,待整个数据包高速发送出去后,DR引脚自动置位。nRF905采用ShockBurstRX模式进行数据接受,此时,使能外部中断,设置P3.7引脚工作在中断方式。数据接收流程图如图4(b)所示。接收数据流程为:首先配置本机地址,然后将TRX_CE和TX_EN引脚都置高,nRF905进入监视状态,等待数据的到来[4]。当接收到正确的数据包后,DR脚自动置位,触发P3.7口的上升沿中断,并通知MCU读取数据;读取数据完毕后,nRF905将DR引脚置低。
基于本系统的分布式特点,在多个节点和一个中心站进行无线通信时,多个节点有可能在某一时刻同时和中心站主机建立通信连接,如果没有合适的协调机制,会导致通信冲突,信道阻塞,丢失传输数据。在数据传输时,通过采用基于竞争方式的MAC协议[5],不仅提高了信道资源的利用率,又增加了通信的可靠性。工作流程如下所述:
(1)子站有数据送出前,先侦听信道状态,通过竞争的方式获得信道的使用权,然后再发送请求传送报文RTS(RequesttoSend)给目标端,请求与目标段的通信连接。
(2)目标段接收到子站的RTS后,向该子站回应CTS(CleartoSend)报文。
(3)接收到目标端CTS命令帧的子站,可以认为与目标端已经建立通信连接,开始向其发送采集到的数据;若子站没有收到目标端的CTS命令,则认为发生冲突,重新发送RTS请求。
(4)目标端收到子站传送的数据并确认数据正确后,向改子站发送ACK确认帧,子站收到ACK后则完成与目标端的数据通信。
利用RTS-CTS握手(handshake)程序来确保各个子站传送数据时不会相互冲突, 同时由于RTS-CTS封包都很小,让传送的无效开销也变小。
为了减小能量的消耗,系统采用“侦听/睡眠”交替的无线信道使用方法。当阈值触发有数据收发时,传感器节点开启nRF905无线通信模块进行数据的发送和侦听;在没有数据需要收发时,节点则控制nRF905无线通信模块进入睡眠状态,以减小空闲侦听所造成的能量消耗。
4应用结果及数据分析
上位机由PC构成,运行矿山微震定位系统应用程序,通过232串口与中心节点连接。由中心节点无线射频模块接收各传感器节点的微震信号,用于定位系统进行震源定位,以辅助监管部门的执法职能。上位机应用程序以LabVIEW为软件开发平台,利用结合了几何定位算法和Geiger算法的联合定位法实现了震源定位[6],由于篇幅所限,这里不再详细介绍震源定位系统,只将无线采集到的数据应用于该定位系统,用以检测无线采集系统的可用性。图5是中心站PC运行的震源定位系统软件界面,其信号为本文无线传感器节点采集到的波形,界面中给出了信号波形、传感器坐标、和利用震源定位算法得到的定位结果。
实验中无线传感器网络的采样频率设置为5kHz,每帧采样长度为512个点。无线传感器节点采用扇形布设在放炮点附近,地表水平布设如图6所示,其中点1~6为检波器布设点,其地表水平面坐标依次为(0,0)、(0,15)、(0,40)、(-14,0)、(-31,0)、(-7,7.5),单位:m。
试验中实际放炮点的水平坐标位置如图6中点Ⅰ、点Ⅱ和点Ⅲ所示,位于传感器网络附近,图5中显示数据为针对于炮点Ⅰ的计算结果,其计算坐标为(-9.15,-5.57),与实际炮点坐标(-8.5,-5)距离为0.86m。通过实验结果可以看出,利用无线传感器网络采集到的震动数据进行震源定位计算,其定位精度在1m以内,能够满足越界开采定位系统项目要求。
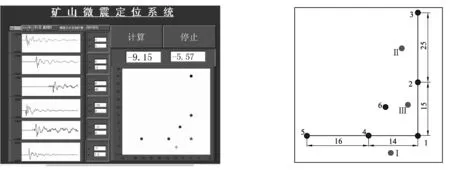
图5 定位结果 图6 检波器排布规则
5结论
针对传统的有线式微震监测系统的不足,本文将无线传感器网络技术应用于矿山越界开采监测系统。实验数据结果表明,采用这种方式所得到的震源位置,其精度能够满足现场要求。该方式提高了监测的实效性和可操作性,降低了人力和财力的投入,尤其适用于无人值守野外监测;同时本文所涉及到的数据实时传输及在线分析、GPS时钟校时、太阳能不间断供电等措施亦适用于无人值守的监测方案,为多个矿区实时在线监测提供了现场基础,也为类似越界开采等野外作业的监测提供了有效手段。
参考文献
[1]李庶林,尹贤刚,郑文达,等.凡口铅锌矿多通道微震监测系统及其应用研究[J].岩石力学与工程学报,2005,24(12):2048-2053.
[2]汪令辉.微震监测系统在冬瓜山铜矿的应用[J].现代矿业,2009,12(12):102-103.
[3]谭朋柳,金海,张明虎.分布式实时系统的集中式相对时钟同步方法[J].华中科技大学学报,2007,35(2):16-18.
[4]王军.地震测量数据无线传输与监控系统[D].武汉:华中科技大学电子与信息工程系,2005.
[5]聂光义.点对多点多任务无线通信[J].电子质量,2003(4):152-154.
[6]薛强.震源定位系统在矿山越界开采监控中的应用研究[D].石家庄:石家庄铁道大学电气与电子工程学院,2011.
ApplicationofWirelessSensorNetworksinMineMicro-vibrationLocationSystem
XueQiang1,Ye Ming2,Fan Junfei3
(1.SchoolofElectricalandElectronicEngineering,ShijiazhuangTiedaoUniversity,Shijiazhuang050043,China;
2.HebeiScienceandTechnologyMuseum,Shijiazhuang050000,China;
3.ShijiazhuangTrainingBase,BeijingRailwayBureau,Shijiazhuang050000,China)
Abstract:In view of the high cost, resources waste and poor maneuverability in cable methods in mine monitoring system, by application of wireless sensor networks, a system of mine micro-vibration location is built in this paper. The star wireless sensor network is made up of the end network nodes and the center network node. In order to achieve the purpose of synchronization acquisition, clock synchronization technology was adopted. The signal was transmitted to the center node through the RF module and was processed by the PC. This system is an application research on radio communication in Cross-border mining monitoring.
Keywords:wirelesssensornetwork;digitalsignalprocessing;radiocommunication;clocksynchronization

猜你喜欢
亚太教育(2016年34期)2016-12-26 12:51:31
文理导航(2016年32期)2016-12-19 21:58:13
电脑知识与技术(2016年27期)2016-12-15 20:30:53
农家科技下旬刊(2016年9期)2016-12-15 14:30:38
科技视界(2016年25期)2016-11-25 08:36:37
电脑知识与技术(2016年26期)2016-11-25 00:00:00
电子技术与软件工程(2016年18期)2016-11-14 00:55:58
软件导刊(2016年9期)2016-11-07 17:46:50
中国科技博览(2016年19期)2016-10-19 11:59:52
科技视界(2016年22期)2016-10-18 15:25:08