基于红外成像的舰船目标实时检测跟踪方法研究
2015-12-07 05:21:40张韩西子
舰船科学技术 2015年11期
张韩西子
(中国舰船研究院,北京100192)
0 引 言
红外图像中船舶目标的检测与跟踪在海洋监测、船舶交通、海上战争等方面均具有重要作用。
目前,国内外已提出了大量针对船舶目标检测与跟踪的计算机视觉系统。通常,这些系统包含3个处理步骤:图像预处理、目标检测与目标跟踪。
图像预处理方面,多采用图像增强方法克服红外图像对比度低、噪点多的情况,常用的方法有直方图均衡、平滑滤波、锐化等。同时,为了提高系统的处理效率,可加入一些限制条件,例如水天线检测[1]等来缩小图像扫描范围,达到减少后续操作时间,提高系统实时性的目的。
目标检测的目的是从背景中分割出可能的舰船目标,常用的方法包括基于阈值的分割方法[2],基于聚类的分割方法[3]以及基于主动轮廓的分割方法[4]等。
目标跟踪环节用于研究序列图像,通过预测目标运动的规律,实现对指定目标准确且连续的跟踪。目前常用的跟踪算法可分为以下几类:根据目标的运动特征,可分为图像差分跟踪算法、基于目标光流特征的跟踪算法等;根据跟踪序列前后的相关性,可分为模板相关算法、基于特征点的相关算法等;根据目标特征参数,可分为基于目标轮廓的跟踪算法、基于目标特征点的跟踪算法等[5]。
本文首先对红外图像进行平滑滤波及锐化处理来消除图像噪声,突出目标轮廓,再通过检测水天线确定目标可能存在的区域,在候选区域内进行图像分割获得可能的候选目标作为感兴趣区域(Regions of Interest,ROI),对所有ROI 通过特征辨识完成舰船目标的定位检测,最后对检测到的目标进行自适应波门跟踪。
1 图像增强
红外图像往往含有由外界环境因素或成像系统本身原因造成的噪声,从而造成图像模糊问题。为了提高图像信噪比和后续目标检测与跟踪阶段的精度,需对红外图像进行平滑滤波来抑制噪声影响。
根据文献[6]的研究结果,中值滤波具有平滑效果好、易于硬件实现和利于系统实时性等诸多优点。本研究选择该方法对红外图像进行平滑处理,模板大小选为3 ×3,平滑结果如图1所示。

图1 图像平滑Fig.1 Image smoothing
经过平滑处理后的图像虽然达到了噪声抑制目的,但同时也提高了图像模糊程度。为了提高目标轮廓的清晰度,使后续目标检测与跟踪的结果更为准确,本研究采用微分锐化法中的拉普拉斯锐化[7]对平滑后的图像进行处理,结果如图2所示。

图2 图像锐化Fig.2 Image sharpening
2 水天线检测
对水天线的检测采用边缘检测与Hough 变换相结合的方式进行。这种方法与一些规定水天线总是处于水平方向的方法[8]相比,考虑到了水天线是倾斜的情况。首先通过canny 算子检测图像边缘,然后通过累计概率Hough 变换(Progressive Probabilistic Hough Transform,PPHT)算法定位图像空间中的直线位置。
PPHT 是标准霍夫变换 (Standard Hough Transform,SHT)的一种改进算法,它不是对图像中所有的边缘点进行图像空间至参数空间的投影,而是只在参数空间中对图像空间中的一部分点进行累加,可以有效降低算法复杂度,提高系统实时性,该方法的算法流程如图3所示。

图3 累计概率Hough 变换算法流程Fig.3 The algorithm flow of PPHT
考虑到边缘图像中最长的直线通常为舰船下缘,同时水天线应在水平方向附近变化。故选择边缘图像中与水平线夹角在±60°间的最长直线作为检测到的水天线。检测结果如图4所示,红线为检测到的水天线,绿色框为进行后续操作的图像区域。
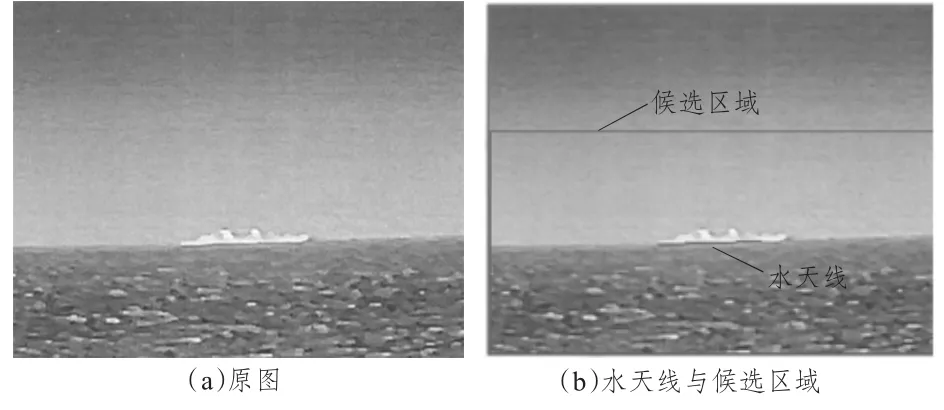
图4 水天线检测Fig.4 Waterline detection
3 目标定位检测
由于红外图像中背景与目标的灰度值不是常数,目标与背景的对比度在图像中是变化的,因此需从概率的角度选择合适的阈值来对图像进行分割。本研究选择大津阈值分割法对水天线检测后获得的区域进行检测。
设一幅图像的灰度值为0~m-1 级,灰度值i的像素数为ni,图像的全部像素为N,则:

各个灰度值的概率:
整体图像的灰度平均值:

阈值为T 时的灰度平均值:

然后用阈值T 将图像的m 级灰度值划分为2 组C0=(0,1,…,T)和C1=(T +1,T +2,…,m-1),则C0和C1产生的概率、平均值和方差分别为:
C0产生的概率:

C1产生的概率:

C0的平均值:

C1的平均值:

C0的方差:
C1的方差:

全部采样的灰度平均值为:

类间方差为:

在灰度值范围内改变T,令式(2)有最大值,则T*=maxδ2(T)即为所求的阈值,δ2(T)称为阈值选择函数。
此方法在图像的灰度直方图不存在明显双峰的情况下也能得到较满意的结果,因此是自适应阈值分割中的最优方法。
大津阈值分割的结果如图5(b)所示。对原图像直接进行大津阈值分割的结果如图5(a)所示,可以看到图像增强提高了图像分割的准确率。

图5 图像分割Fig.5 Image segmentation
对图像分割后的所有ROI 进行特征辨别,符合舰船目标特征的作为最终检测到的目标,本研究通过分析红外图像中舰船目标的各类特征,选择面积和长宽比对ROI 进行判别。当ROI的面积小于一定阈值时,认为其不可能是舰船目标,或是舰船目标但距离过远尚无需检测。根据实际舰船的形状,目标的长宽比应在一定范围内,若长宽比超出该范围,则认为该ROI为虚假目标。目标检测结果如图6所示。
4 目标跟踪
波门跟踪是目前跟踪系统中一种常用的方法。利用波门进行目标跟踪时,首先需要设计一个比目标尺寸略大,但小于整个视场的波门,在跟踪过程中该波门应紧紧套住目标图像,是跟踪系统中真正的处理窗口。这样除了可以减少程序需要处理的数据,也可以减少跟踪过程中其他因素的干扰。

图6 目标检测结果Fig.6 Target detection results
跟踪波门可分为固定与自适应2 种,固定波门在跟踪过程中尺寸始终不变,自适应跟踪波门的大小、中心位置会随目标大小及姿态的改变而变化。考虑到序列图像中目标的大小及运动姿态不可能完全不变,本文选择自适应波门法对目标进行跟踪。跟踪波门形状选择矩形。考虑到目标形心受姿态变化影响较小,且在战争中,形心是最好的瞄准点,本文选择目标的形心位置作为波门跟踪的参考点。
假设视频中的某一帧经过二值化后的图像为g(x,y),处理窗口尺寸为M×N,用(△X,△Y)来表示当前帧中目标的形心位置,则其由式(13)计算得出。
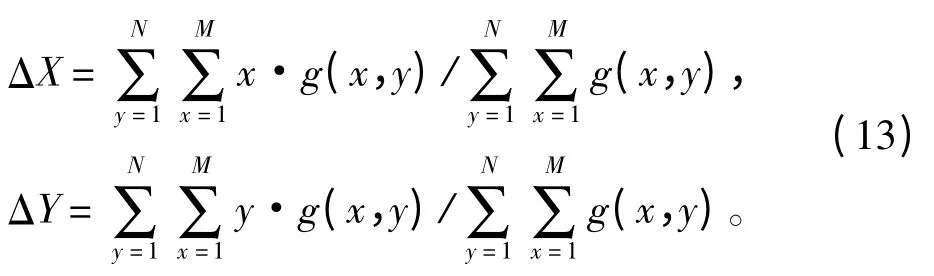
其中,g(x,y)为图像中位于坐标(x,y)处的像素点的灰度值,在这里用二值(0,1)表示,目标区域上的像素点g(x,y)= 1,背景区域上的像素点g(x,y)= 0。
基于形心的波门跟踪算法处理过程如图7所示。

图7 基于形心的波门跟踪算法处理过程Fig.7 Process of window-tracking algorithm base on target centroid
对网上获得的视频[10]进行检测跟踪,结果如图8所示。浅色矩形框为跟踪波门。
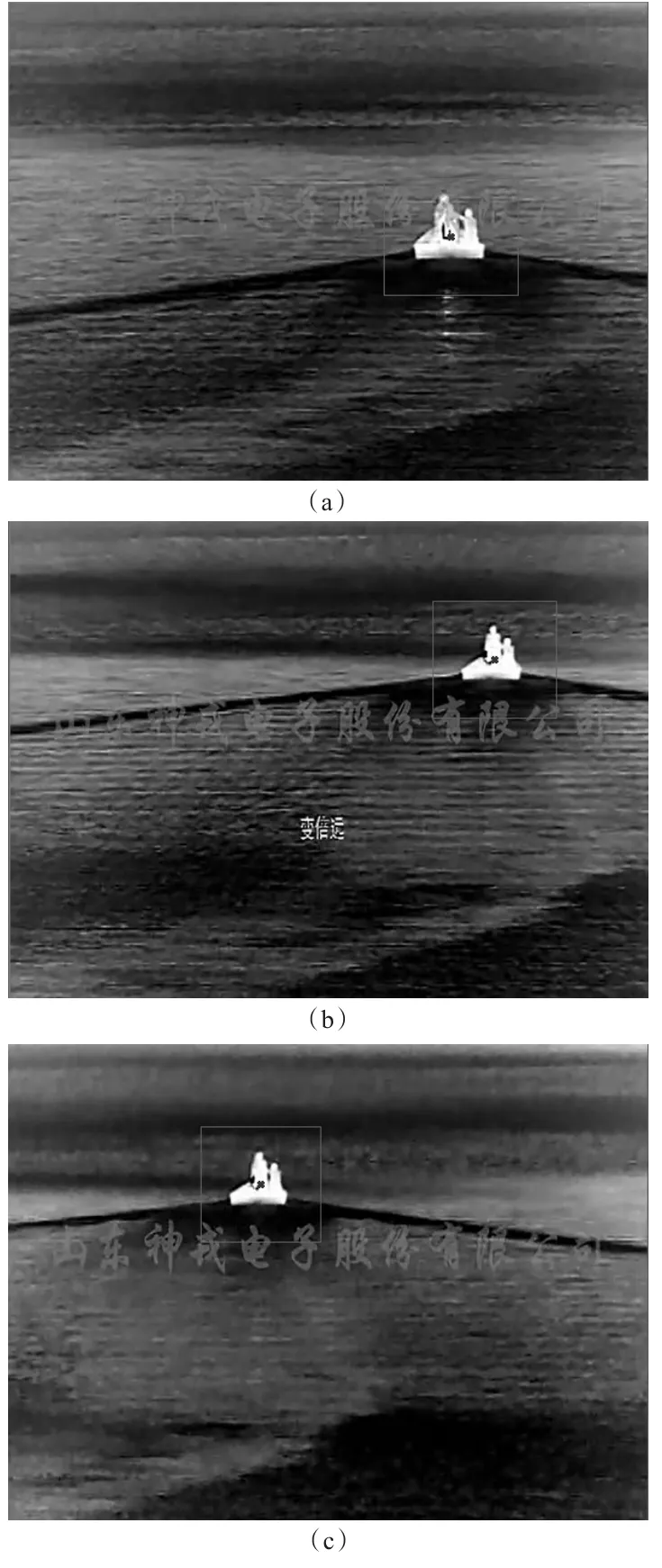
图8 目标跟踪结果Fig.8 Tracking results
5 实验结果分析
对500 幅舰船红外图像的检测结果进行统计,检测的准确率可达到92%。在水天线检测时,对于上层建筑较少的船只,船只上缘也会出现较长的直线,而船只下缘由于一些干扰物的影响,可能会出现直线长度小于上缘的情况,如图9所示。由于水天线检测只是为了缩小后续处理的区域,提高系统实时性。因此,只要舰船目标仍在由水天线推断出的候选区域中,则此情况不会影响到后续的处理效果。

图9 水天线误检测情况Fig.9 Wrong detection of waterline
检测时间受处理器性能及图片大小等影响。本文实验平台为Lenovo Y480 笔记本,CPU为Intel 酷睿i5-3210M,2.5 GHz,内存容量4 GB,操作系统为Microsoft Windows 7。本文将图片统一缩放至600×450 大小进行定位检测,检测时间为红外图像中检测到一个目标所需的平均时间,各流程所需算法时间如表1所示。

表1 算法时间Tab.1 Process time
对序列图像第一帧进行检测跟踪的时间约为39.97 ms,对后续帧的操作因仅在波门内进行处理,故处理时间小于39.97 ms,可满足系统实时性要求。
6 结 语
本研究对红外成像过程中舰船目标的检测跟踪方法进行研究,主要分为以下3个阶段:
预处理阶段,首先通过图像增强抑制噪声,突出目标轮廓,对原图和增强后的图像分别进行阈值分割,对比结果证明该图像增强方法可有效提高后续算法的准确率。接着对图像中的水天线进行检测,获得目标可能存在的候选区域,降低后续检测算法的操作区域,提高了系统实时性。
检测阶段,首先对候选区域进行阈值分割,获得ROI 后进行特征辨识,符合要求的作为最终的目标检测结果,实验结果证明该方法可获得较高的准确率。
跟踪阶段,采用基于形心的波门跟踪算法实现序列图像中舰船目标的跟踪。
对本研究提出的检测跟踪方法中各个算法流程的处理时间进行统计分析,结果证明该方法具有较好的实时性。
[1]LI Heng,WANG Xin-yu.Automatic reccog-nition of ship types from infrared images using support vector machines[J].2008 International Conference on Computer Science and Software Engineering,2008,6:483-486.
[2]LIAO M,WANG C.Using SAR images to detect ships from sea clutter[J].IEEE Geosci.Remote Sens.Lett.,2008,5(2):194-198.
[3]COMANICIU D,MEER P.Mean shift:a robust approach toward feature space analysis[J].IEEE Transactions on Pattern Analysis and Machine Intelligence,2002,24:603-619.
[4]CHAN T F,VESE L A.Active contours without edges[J].IEEE Transactions on Image Processing,2001,10:266-277.
[5]奚慧婷.刚性运动目标的跟踪算法研究[D].吉林:吉林大学,2008.
[6]于天河,郝富春,康为民,等.红外图像增强技术综述[J].红外与激光工程,2007,36(z2):335-338.YU Tian-he,HAO Fu-chun,KANG Wei-min,et al.Summarization on the infrared image enhancement technology[J].Infrared and Laser Engineering,2007,36(z2):335-338.
[7]刘延武,何友金,孙旭辉.舰船目标红外图像锐化处理[J].红外技术,2004,26(5):5-9.LIU Yan-wu,HE You-jin,SUN Xu-hui.Infrared image sharpening for warship targets[J].Infrared Technology,2004,26(5):5-9.
[8]张天序.成像自动目标识别[M].武汉:湖北科学出版社,2005.
[9]刘延武.舰船红外图像的传输与识别[J].计算机仿真,2011,28(2):316-319.LIU Yan-wu.Transmission and recognition of infrared image for warship[J].Computer Simulation,2011,28(2):316-319.
[10]山东神戎.山东神戎电子红外热成像3kn 清晰观察船只[EB/OL].http://www.tudou.com/programs/view/TEP1_KYoXQg/.
猜你喜欢
舰船科学技术(2022年21期)2022-12-12 08:07:10
兵器装备工程学报(2022年7期)2022-08-10 03:37:34
北京航空航天大学学报(2022年6期)2022-07-02 02:00:02
高技术通讯(2021年3期)2021-06-09 06:57:48
舰船科学技术(2021年12期)2021-03-29 01:28:44
科学与信息化(2021年5期)2021-03-19 01:09:24
无线电工程(2020年11期)2020-10-28 07:12:24
计算机应用与软件(2020年8期)2020-09-02 01:33:56
自动化学报(2017年5期)2017-05-14 06:20:56
光学精密工程(2016年1期)2016-11-07 09:01:59