SAR图像舰船目标双阈值快速CFAR检测算法
2015-12-20 03:51曲长文邓淇元
舰船科学技术 2015年11期
曲长文,邓淇元,江 源
(海军航空工程学院 电子信息工程系,山东 烟台264001)
0 引 言
合成孔径雷达(Synthetic Aperture Radar,SAR)具有全天时、全天候、宽覆盖、高分辨等优点,还具有一定的穿透能力,在战场环境侦察、军事敏感区域监视、重要军事目标成像以及打击效果评估等军事应用中有广泛的应用前景[1-2]。但是舰船目标具有强雷达后向散射,在低分辨SAR 图像中表现出非常亮的点目标,而在高分辨SAR 图像中表现为分布式目标。因此,从技术角度讲,SAR 图像舰船目标检测本质上是暗海洋背景下的亮目标检测问题[3]。
关于恒虚警检测算法,最新方法有:Jung 等提出了针对高分辨率SAR 图像中多个目标的快速CFAR 检测算法。他对3 ×3 邻域的均值进行CFAR检测,如果大于阈值,则对邻域中的每个像素进行CFAR 检测,如果小于阈值,则跳过该邻域[4]。该算法精度高,但是运算强度较大,工程实用性不强。艾加秋提出基于灰度相关性的SAR 图像联合CFAR舰船检测算法。通过舰船目标内部相邻像素间的灰度强度相关性和舰船目标与海杂波的信杂比,来实现联合CFAR 检测[5]。但由于该算法的检测阈值通过二维积分得到,计算复杂度比传统一维CFAR 检测算法大。潘卓等[6]提出了一种基于聚类的SAR 图像快速目标检测算法,先对SAR 图像进行基于改进的Mean shift 聚类处理,将大部分背景杂波区域剔除掉,然后引入结构思想,在聚类后的目标区域进行双参数CFAR 精细检测。但是应用于低分辨率或含有小目标的SAR 图像时,容易产生漏警。
传统的舰船检测方法主要有双参数CFAR 检测算法和基于统计模型的CFAR 检测算法。双参数CFAR 算法是基于假设背景服从高斯分布,使用局部滑动窗口适应背景杂波的局部性变化,并不适用于描述海面杂波。基于统计模型的CFAR 检测算法通过采用合理的统计分布模型对目标周围的背景杂波进行建模,计算在给定虚警概率条件下的自适应检测阈值,然后将检测像素与阈值进行比较,判断像素点是否为目标。K 分布是描述海杂波的经典模型,多数情况下,不仅能够较好地拟合海杂波分布,而且还能够正确地将海杂波脉冲间的相关特性考虑在内。
针对上述检测算法的局限性,本文在基于K 分布的CFAR 检测算法基础上予以改进,引入全局阈值预检测环节,提出一种基于K 分布的双阈值快速CFAR 检测算法,提升了检测速度,改善了多目标环境下的检测性能。
1 K 分布模型
Jakeman 和Pusey 提出的K 分布模型[7]是经典的SAR 杂波统计模型,已被证实非常适合描述SAR图像中均质与中度异质杂波,在森林、草地、山区和中低海况海面等场景杂波建模中有着重要的应用。
当地物后向散射σ 服从阶参数为ν 的伽马分布时,其概率密度函数为

式中,μ 为平均雷达散射截面积。其对应的SAR 强度图像I 服从K 分布

式中,L 为等效视数;Kn(x)为n 阶第二类修正贝塞尔函数。
K 分布的r 阶原点矩可以表示为

2 SAR 图像舰船检测
2.1 K 分布模型参数估计
对SAR 图像,等效视数定义为:

两边分别对r 求导得到统计量E[IrlogI](记为zr(I)),

可以得到1 阶对数矩:

式中,ψ(·)为Digamma 函数。
联立式(4)~式(6),并取r = 1,有:
用样本矩代替总体矩,可得:
对于μ 和ν,利用期望最大法进行参数估计[8]:
式中,

2.2 双阈值CFAR 检测算法
对于一幅SAR 图像,通常情况下舰船目标所占像素的比率较低。因此,绝大多数的像素点(杂波像素点)不需要进行局部窗口CFAR 检测。本文提出在局部窗口CFAR 检测之前,引入基于全局阈值的预检测环节,将超过全局阈值的像素点视为疑似目标点,将低于全局阈值的像素点视为杂波点并在局部窗口CFAR 检测中不予考虑。同时,考虑到目标环境下的计算性能,本文在局部窗口CFAR 检测过程中,引入筛选机制,利用全局阈值检测的结果剔除背景窗口中的疑似目标像素,从而能够消除泄露到背景窗口中的目标像素对杂波统计特性的影响。
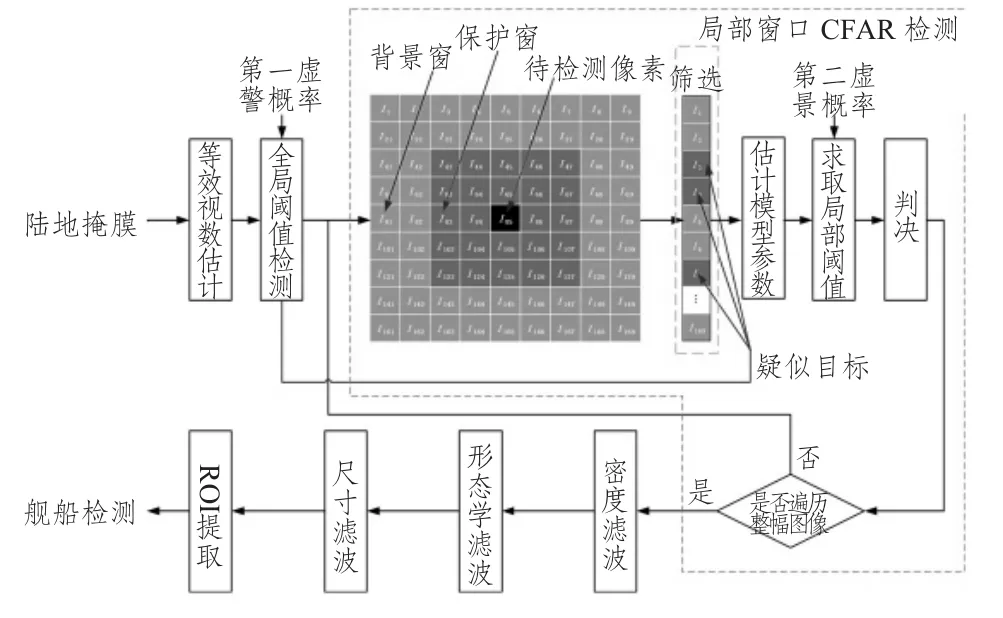
图1 基于K 分布的双阈值快速CFAR 检测算法流程图Fig.1 Flow chart of K distribution-based double threshold CFAR fast detection algorithm
算法流程如图1 所示,具体为:
1)对于一幅SAR 图像,利用式(6)和式(7)估计K 分布模型参数;
2)设置第一虚警率Pfa1,为避免漏警,第一虚警率应设置较高,确定阈值门限,

对于K 分布,

对于SAR 图像中的像素I,将其强度值与阈值T比较,若大于等于T 则标记为1,否则标记为0,直至遍历每个像素;
3)设置滑动窗口的保护窗、背景窗和第二虚警率Pfa2,通常情况下第二虚警率应设置较低值,实现精确检测;
4)对全局阈值检测阶段标记为1 的每个像素,进行局部窗口CFAR 检测。根据全局阈值检测的结果对背景窗口的像素进行筛选,滤除疑似目标的像素,然后利用剩余的像素点估计K 分布参数并计算第二阈值。
5)对待检测像素值与第二阈值进行比较,得到判决结果。
6)判断是否遍历图像中的每一个全局阈值检测阶段标记为1 的像素,是则继续下一步,否则返回第4 步;
7)采用形态学滤波器、密度滤波器和尺寸滤波器对第6 步得到的二值检测结果进行滤波,滤除小的孤立区域,降低虚警。
3 算法仿真及分析
3.1 仿真实验
为验证本文提出的舰船检测算法的优越性,使用全局阈值CFAR 算法、局部窗口CFAR 算法和双阈值CFAR 算法进行检测对TerraSAR - X 和ENVISAT 图像进行检测。
第1 幅为图2(a)所示的TerrSAR -X 图像。该图像的分辨率为3 m ×3 m,尺寸为2266 像素×1715 像素,HH 极化,以人工目视判读的结果作为真实目标信息。在该图像中,总共有16 艘舰船,如图2 中红色方框所示。在SAR 图像中,舰船目标表现为强亮点,海杂波较暗且比较均匀,船海对比度较高,有利于目标检测。全局阈值和局部窗口检测算法的虚警率设置为Pfa=10-6.5,双阈值检测算法的第一虚警率设为Pfa1=10-2,第二虚警率设为Pfa2=10-6.5,检测结果如图2 所示。
对TerrSAR - X 图像,图2(b)有1 个漏警,图2(c)有3 个虚警,图2(d)有2 个虚警。当海杂波分布较均匀时,采用双阈值CFAR 检测算法既没有虚警也没有漏警,而全局阈值CFAR 检测和局部窗口CFAR 检测均存在虚警,主要是由于海杂波的影响,造成了样本均值μ 的高估,降低了阈值,产生了虚警。
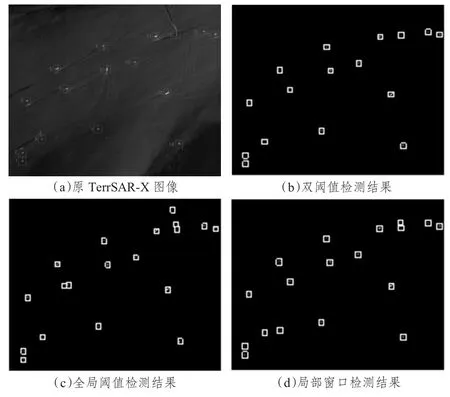
图2 TerraSAR-X 图像不同检测算法的检测结果Fig.2 Results of different detection algorithm based on TerraSAR-X image
为进一步检验3 种检测算法在杂波分布不均匀时的检测性能,第2 幅图像采用欧洲航天局ENVISAT图像。该图像分辨率为12.5 m×12.5 m,尺寸为2 000像素×1 200 像素,VV 极化,依然采用以人工目视判读获得的结果作为真实目标信息。在该图像中总共有14 艘船,如图中方框所示。仍采用上述办法,全局阈值和局部窗口检测算法的虚警率设置为Pfa=10-6.5,双阈值检测算法的第一虚警率设为Pfa1=10-2,第二虚警率设为Pfa2=10-6.5,检测结果如图3 所示。由图可以看出,图3(b)做到了完全准确检测,图3(c)有3个漏警,图3(d)有1 个漏警和4 个虚警。
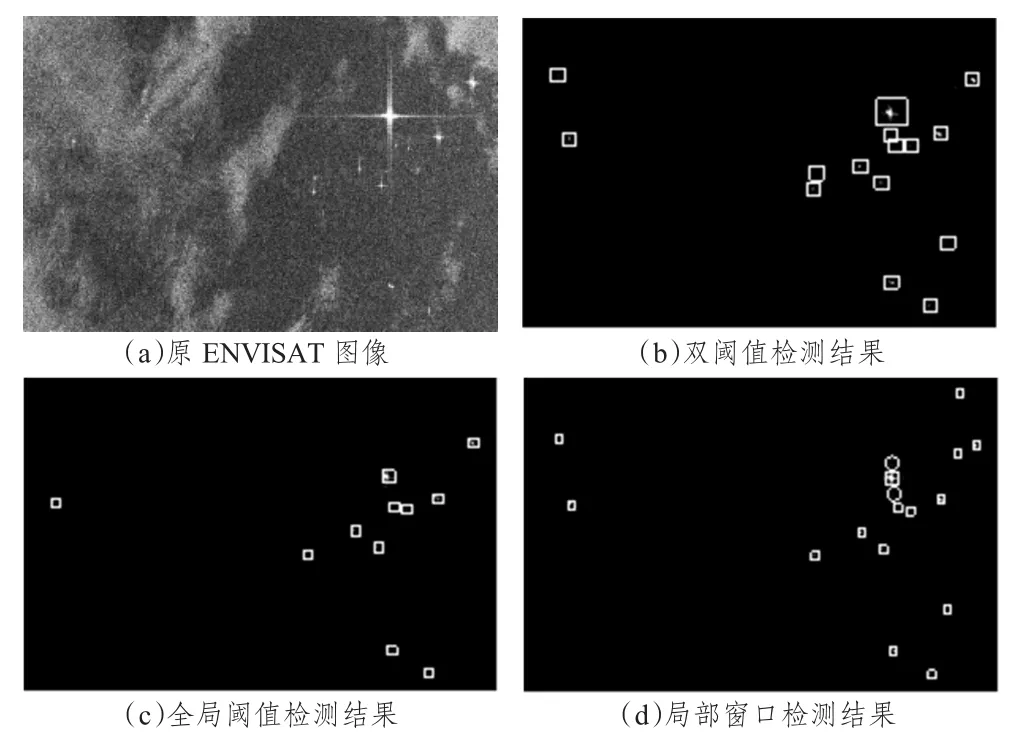
图3 ENVISAT 图像不同检测算法的检测结果Fig.3 Results of different detection algorithm based on ENVISAT image
对ENVISAT 图像,海况较为复杂,特别是7 号目标散射很强,旁瓣明显。虽然采用局部滑窗机制使得所有舰船都被检测,但双阈值CFAR 检测算法仍有1 个虚警,可能是由于K 分布面对复杂海况建模能力较弱。局部阈值CFAR 检测算法的4 个虚警中,有2 个由7 号目标的强旁瓣造成,2 个是由于海杂波的不均匀性造成的,一个漏警则是由于窗口内杂波强度较大,抬高了阈值,形成漏警。全局阈值CFAR 检测算法的效果最不理想,有3 个漏警,主要是由于用整幅图像估计分布参数时,由于海杂波的存在造成了全局阈值的高估,使得形成了漏检。
3.2 计算效率分析
下面分析采用不同检测算法对检测计算效率的影响。所有算法的代码均由Matlab 编写,运行电脑参数为:2.4 GHz 四核CPU、8Gb RAM、Windows 7 32 位计算机系,记录检测部分消耗时间。
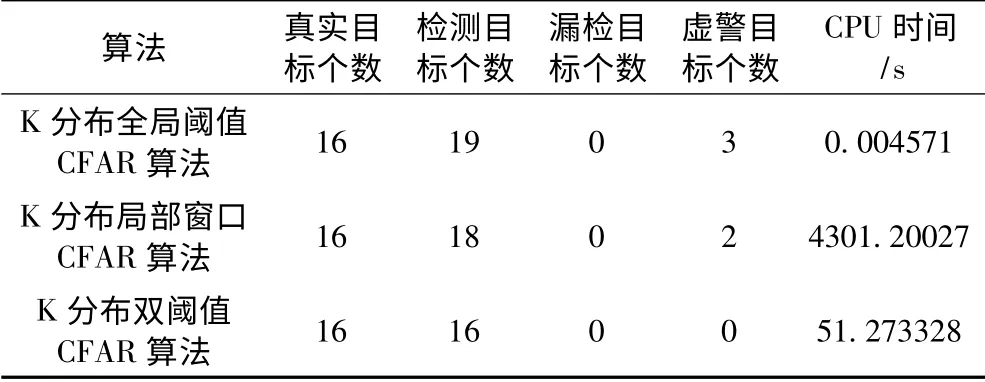
表1 TerraSAR-X 图像3 种检测算法的检测结果指标Tab.1 Results of three detection algorithms
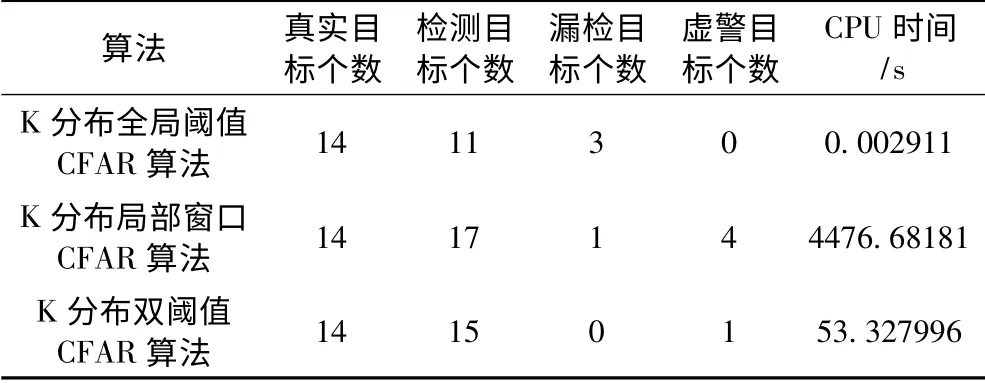
表2 ENVISAT 图像3 种检测算法的检测结果指标Tab.2 Results of three detection algorithms
从表1 和表2 可以看出,在保证检测准确性的前提下,本文提出的双阈值CFAR 检测算法大大提升了检测效率,与局部窗口CFAR 检测算法相比,减少了运算量,速度提升了至少80 倍,验证了基于K 分布的双阈值CFAR 检测算法的优越性,特别适合工程实用,在军事上也有应用前景。
从上面的结果可以看出,本文提出的双阈值CFAR 检测算法的性能要优于全局阈值CFAR 检测算法和局部窗口CFAR 检测算法。这是因为采用全局阈值预检测滤除了绝大多数的非目标像素点,大大地缩短了计算时间,再加上在背景窗中引入了筛选机制,降低了目标泄漏像素对杂波模型参数估计的影响,提高了检测率。但缺点是K 分布在面对复杂海况时建模能力较弱。
4 结 语
本文提出了一种基于K 分布的SAR 图像舰船目标双阈值快速CFAR 检测算法。该方法引入基于全局阈值的预检测环节,利用第一虚警率检测出超过全局阈值的像素点,将低于全局阈值的像素点视作杂波点。在局部窗口CFAR 检测过程中,引入筛选机制,设置第二虚警率,剔除背景窗口中的疑似像素目标并得到最终的检测结果。本文同时对算法的检测效果和计算效率进行分析,分析结果表明本文算法具有很好的实用性。但是本文采取K 分布对海杂波进行建模,面对复杂海况时检测效果削弱。
[1]MOREIRA A,PRATSTIRAOLA P,YOUNIS M,et al.A tutorial on synthetic aperture radar[J].IEEE Geoscience and Remote Sensing Magazine,2013,1(1):6 -43.
[2]陈俊,周强,曲长文,等.海面舰船尾迹SAR 图像仿真[J].舰船科学技术,2015,37(2):58 -62.CHEN Jun,ZHOU Qiang,QU Chang-wen,et al.SAR imaging simulation of the ship wave[J].Ship Science and Technology,2015,37(2):58 -62.
[3]种劲松,欧阳越,朱敏慧.合成孔径雷达图像海洋目标检测[M].北京:海洋出版社,2006.
[4]JUNG C H,SONG W Y,RHO S H,et al.Double-step fast CFAR scheme for multiple target detection in high resolution SAR images[J].In:Proceedings of the 2010 IEEE International Radar Conference.Washington D.C.,USA:IEEE,2010:1172 -1175.
[5]艾加秋.基于灰度相关性的SAR 图像联合CFAR 舰船检测算法[J].雷达科学与技术,2014,12(2):149 -155.AI Jia-qiu.A new CFAR ship detection algorithm based on gray intensity correlation in SAR images[J].Radar Science and Technology,2014,12(2):149 -155.
[6]潘卓,高鑫,王岩飞,等.基于聚类的SAR 图像快速目标检测[J].计算机应用研究,2008,25(8):2416 -2419.PAN Zhuo,GAO Xin,WANG Yan-fei,et al.Clusteringbased target fast detection for SAR imagery[J].Application Research of Computers,2008,25(8):2416 -2419.
[7]TISON C,NICOLAS J,TUPIN F,et al.A new statistical model for Markovian classification of urban areas in highresolution SAR images [J].IEEE Transactions on Geoscience and Remote Sensing,2004,42 (10):2046-2057.
[8]ROBERTS W J J,FURUI S.Maximum likelihood estimation of K-distribution parameters via the expectationmaximization algorithm[J].IEEE Transactions on Signal Processing,2000,48(12):3303 -3306.
猜你喜欢
舰船科学技术(2022年21期)2022-12-12
北京航空航天大学学报(2022年8期)2022-08-31
科学与信息化(2021年30期)2021-12-24
舰船科学技术(2021年12期)2021-03-29
雷达与对抗(2020年2期)2020-12-25
火控雷达技术(2020年2期)2020-10-16
雷达与对抗(2020年1期)2020-06-05
金桥(2018年4期)2018-09-26
北京航空航天大学学报(2016年9期)2016-11-16