一种AUV水下接驳站的研究
2015-12-20 03:51羊云石顾海东
舰船科学技术 2015年11期
程 烨,羊云石,林 婕,顾海东
(中国船舶重工集团公司 第七一五研究所,浙江 杭州310023)
0 引 言
随着信息技术的不断发展,自主式水下无人航行器(AUV)作为探索海洋空间的有力工具之一,在军事和科学研究方面起着越来越重要的作用。未来AUV 在作业内容,续航力、应急性、集群作业、运行成本等方面面临更高的要求,发展水下接驳技术就显得十分必要[1-4]。
目前水下接驳系统按对接方式主要分为3 类:捕捉式对接、平台式对接和包容式对接。其中包容式对接接驳系统结构简单、对AUV 改造较小、可以较大程度地保护AUV,典型的对接系统有Woods Hole 研究所的REMUS AUV 水下对接系统和MBARI研究所为Bluefin AUV 开发的水下对接系统。2 种对接系统均采用渐缩型入口装置引导AUV 进入对接位置,所不同的是REMUS AUV 对接系统采用线性执行器引导水密电连接器进行插拔实现充电和数据传输,而Bluefin AUV 对接系统的数据和能量传输均采用非接触感应传输[5-10]。
本文介绍了一种适用于2 000 m 深海的AUV 水下接驳站,详细介绍了接驳站的主要机构及其功能,对插拔机构进行独创性设计,并在湖上试验中验证了接驳站的可用性。
1 AUV 水下接驳站工作原理及方案设计
1.1 AUV 水下接驳站工作原理
AUV 水下接驳站通过某种手段引导AUV 进入接驳站并将其锁定,完成充电与信息传输后释放AUV。
接驳站利用超短基线水声定位阵与通信声呐与AUV 进行定位、通信和引导,使得AUV 自动进入接驳站对接筒内。接驳站上的到位传感器检测到AUV 到位后通知插拔机构锁定AUV 并插入水密电连接器,建立能量与信息传输通道。在完成充电与数据传输后释放AUV 完成整套对接流程。接驳站利用俯仰机构调节对接筒俯仰角辅助AUV 进站,并利用三路视频信号对接驳站运行情况进行全面监视。接驳站与海底观测网或岸基站建立数据与能量的传输通道,接收其指令。
1.2 AUV 水下接驳站方案设计
AUV 水下接驳平台主要包括控制单元、通信单元、驱动单元、俯仰机构、插拔机构、传感器及电源部分。其中通信单元主要用来与AUV 平台和海底观测网或岸基站进行信号传输;控制单元完成命令接收、命令下传、数据处理等功能;驱动结构接收控制单元指令驱动俯仰机构及插拔机构完成预定动作;俯仰机构用于调节对接筒俯仰角;插拔机构用于引导接驳站与AUV 完成水密接插件的插拔;传感器包括用于导航定位的定位阵与通信声呐,监测AUV 进站的到位传感器,监测接驳站工作深度的深度传感器以及监测接驳站工作状况的3 路黑白摄像机。其系统框图如图1 所示。
1.3 AUV 水下接驳站关键技术分析
AUV 水下接驳站作为AUV 的支持系统,是AUV 作业安全的重要保证。本文在综合分析的基础上,总结设计的关键技术如下:
1)复杂环境下长期可靠工作
接驳站设计工作深度2 000 m,并需长期工作。深海压力与温度变化剧烈,海底地形复杂,暗流、泥沙、生物附着不可避免。这就要求AUV 接驳站具备高可靠性,对复杂环境具有很强的适应性。
2)接驳传输技术
接驳传输装置是实现AUV 充电与通信的核心机构,在深海、无人工操作的条件下该套机构需具备自动导向对正、便捷锁紧与松开、不受海水压力影响的湿插拔能力,可靠高效地完成水下能量、信息传输任务。
2 系统方案实施
2.1 接驳站结构设计
接驳站结构主要由基座、坞站、俯仰机构、插拔机构能够组成,为深度传感器、到位传感器、水下摄像头等提供安装平台,图2 为水下接驳站总体组成。

图2 AUV 水下接驳站总体组成Fig.2 Solid model of the dock with AUV
1)坞站
坞站主要包括引导口和对接筒。引导口由多根玻璃钢引导杆箍成,引导杆与轴线夹角由外及内渐缩,以利于AUV 进坞。引导口入口直径2 m,满足接驳站与AUV 间的导航定位误差。玻璃钢材料的对接筒内壁直径0.38 m,比AUV 外壁直径大0.03 m,此间隙保证AUV 或对接筒内可能出现的附着物不会影响AUV 正常进坞。对接筒开口端两侧有2 个对称的导向槽,通过与AUV 上导向销的配合实现对AUV 横倾±8°的纠偏。导向槽末端设置2 个到位传感器,用以监测AUV 是否到达对接位置。坞站与基座轴向定位可调,可保证坞站重心在俯仰杆轴线上,减轻俯仰配重。对接筒轴线高于基座底面3 m,避免了AUV 触礁的可能性。
2)插拔机构
如图3 所示,插拔机构由置于耐压壳体内的伺服电机驱动,通过丝杆将电机回转运动转化为直线运动,用以驱动电连接器的插拔运动。布置在电连接器两侧的导销与AUV 上的导向轴套配合实现插拔装置与AUV 的周向固定,为电连接器的插拔提供精确的对中。插拔装置置于底部配有万向球的圆锥弹簧上,辅以喇叭口形状的导向轴套,插拔机构可实现±15°的轴向角度纠偏以及±20 mm 的轴向位置纠偏。
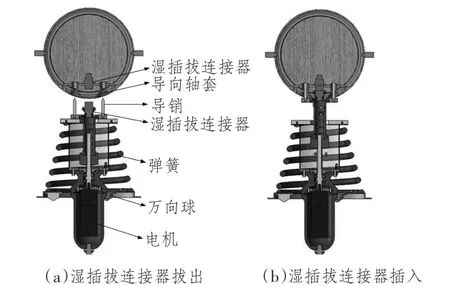
图3 插拔机构Fig.3 Insert-draw mechanism
3)俯仰机构
俯仰机构主要包括俯仰杆、配重块和2 个俯仰电机。之所以未采用结构更为简单的万向节设计,主要是因为现有机构可在2 个俯仰电机的配合下实现对坞站俯仰角度±15°内调节,而非万向节机构简单地调平坞站。更为重要的是俯仰电机可实现对坞站的晃动,可避免AUV 卡滞在坞站内而无法进退,这一设计对于深海对接具有重要意义。
2.2 接驳站硬件体系结构
AUV 水下接驳站系统硬件结构框图如图4 所示。
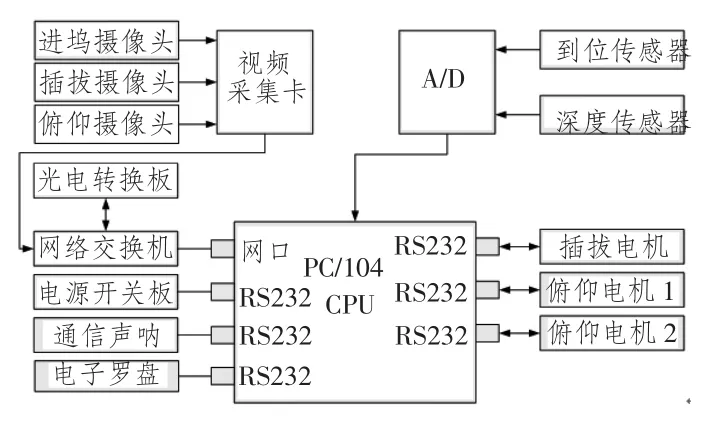
图4 AUV 水下接驳站系统硬件结构框图Fig.4 Hardware configuration of the AUV dock
1)电机需求
插拔机构需提供50kgf 的插拔力,在Tr14 ×3 的丝杆配合下,需34 N·m 的动力力矩,选用输出扭矩4 N·m 的直流无刷电机和减速比10∶1的减速器可满足需求。同理俯仰机构选择同款电机配以减速比为100∶1的减速器可满足20 s 内完成15°俯仰角的需求。
2)湿插拔连接器
水下湿插拔连接器选用法国苏里奥公司8810 型12 芯连接器,能满足3 000 m 水深的插拔,单芯最大电流15 A。
3)深度传感器
深度(压力)传感器用于测量接驳站的布放深度,作为已知信息预设给AUV。由于接驳站工作深度为2 000 m,故需选取量程大于2 000 m 的压力传感器。综合比较后,选用Valeport 公司的miniIPS 智能压力传感器。
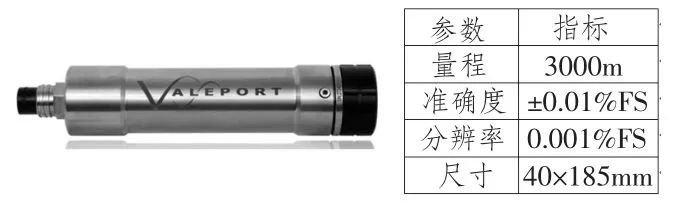
图5 深度传感器Fig.5 Depth transducer
4)电子罗盘
电子罗盘用于测量导引结构的朝向,作为已知信息预设给AUV。由于电子罗盘的航向角、横摇角是AUV 控制和水声定位的输入信息,因此其精度必须较高。采用sbg 公司的IG-500A 型罗盘。
5)水下摄像头
水下摄像头和照明灯用于水下实验时观察AUV靠近接驳站的状态,观察水下插拔机构的运动状态,为人工操控提供视频图像。由于接驳站工作深度为2 000 m,故需选取耐压大于2 000 m 的摄像头和照明灯。3 个摄像头均选用Imenco 公司的Lantern Shark 水下摄像头(内置LED)。
2.3 接驳站软件体系结构
接驳站控制系统为具备水下远程监控功能的分布式测控系统,在保证测控速度的同时需保证测控精度。采用以嵌入式主板为水下测控中心、工控机为水面控制单元及人机交互平台的分布式测控系统,软件系统层次图如图6 所示。从整体结构而言,此系统可以划分为3 个层次:水面监控层、水下控制层和现场层。
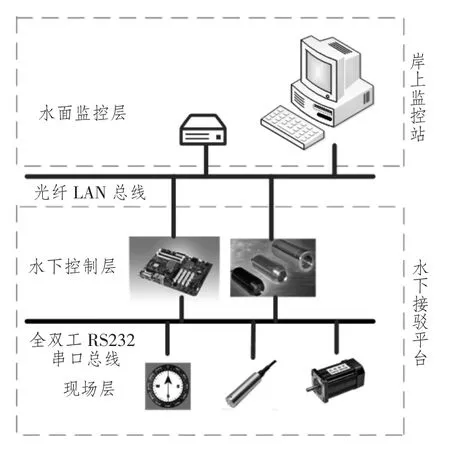
图6 AUV 接驳站软件系统层次图Fig.6 Software configuration of the AUV dock
1)水面监控层
水面监控层负责整个接驳站的监测和控制,具有最高权限。软件程序具备如下功能:
①唤醒接驳站;
②管理接驳站各模块电源开断;
③获取接驳站状态参数和视频,实时显示和存储;
④控制接驳站插拔电机、俯仰电机;
⑤软件的方式切断接驳站电源。
水面监控层接收水下接驳站状态参数和视频数据。视频数据由专用视频采集卡打包,采用专门的API 接口函数解码,可以实时在监控软件界面上预览。接驳站状态数据以TCP/IP 协议传输,利用套接字技术,以完整的数据帧形式发送。水面监控层接收接驳站上传的状态数据帧,进行解析和校验,实时地将数据进行处理和显示。同时,水面监控层有权限以软件控制的方式控制插拔机构执行插拔动作以及控制俯仰机构调节俯仰角。监控界面如图7 所示。
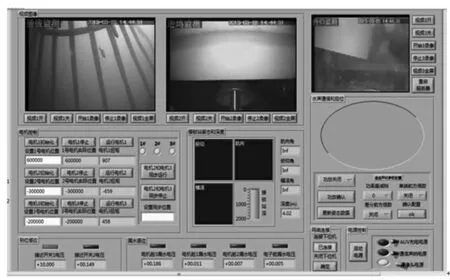
图7 上位机监控界面Fig.7 Interface of the upper computer
2)水下控制层
水下控制层以嵌入式主板为核心,通过全双工串行数据总线采集现场层数据,并对采集的数据进行处理并构造帧格式,将监控数据上传至水面监控层。同时,水下控制层接收并执行水面监控层指令。
3)现场层
现场层安装有水声通信声呐、电子罗盘、到位传感器、摄像头等传感器,通过各水密电缆与安装于接驳站电子舱内的水下控制层主板相连。
3 湖上试验
2015 年5 月下旬在千岛湖开展了接驳站验证试验,主要验证了AUV 接驳站和插拔机构的水下工作性能,如图8 所示。试验水域水深4 ~5 m,湖面有微波,湖底有10°左右的倾角,满足试验条件。本次试验不进行AUV 的导航入坞,仅将搭载插拔机构的头段置于坞站内进行插拔试验。为更真实模拟实际对接,AUV 头段在坞站内仅用柔性绳进行轴向限位,头段可灵活晃动。
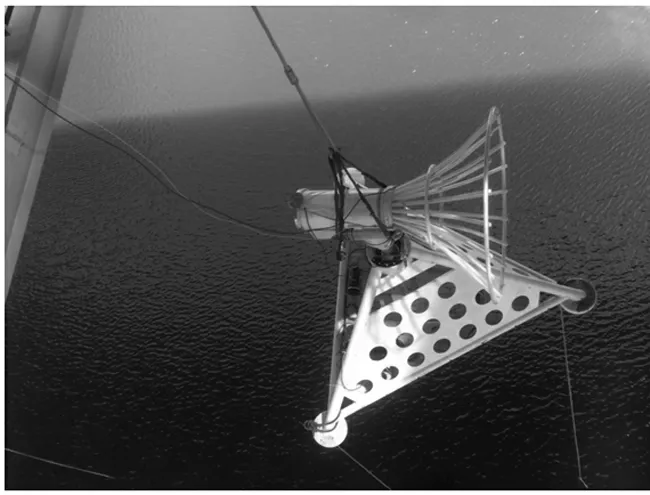
图8 接驳站布放过程Fig.8 Dock during lake testing
在多组插拔试验中,插拔机构均能在轴向角度偏差15°,轴向位置偏移±20 mm 以内的偏差内顺利纠偏,完成水密接插件插拔动作,从监控视频及插拔电机瞬时扭矩可知,插拔过程平稳,到位准确。待接驳站起吊回试验平台后检测可知接插件完好无损。在俯仰试验中,位于底座底板上的2 个电机通过链条牵引440 kg 的配重块,实现俯仰角为±15°的俯仰运动,运动过程平稳迅速,电机输出扭矩仍有富余。
4 结 语
本文介绍了一种AUV 水下接驳站,从接驳站机械结构、硬件体系、软件体系等方面做了全面阐述。试验证明,插拔机构可平稳可靠地实现与AUV 的对接,对AUV 具有良好的纠偏能力,整套接驳站运行稳定无故障,可进一步用于与AUV 的联合海试。下一步将致力于接驳站的小型化研究。
[1]燕奎臣,吴利红.AUV 水下对接关键技术研究[J].机器人,2007,29(3):267 -273.YAN Kui-chen,WU Li-hong. A survey on the key technologies for underwater AUV docking[J].Robot,2007,29(3):267 -273.
[2]PARK J Y,JUN B H,LEE P M,et al. Experiment on underwater docking of an autonomous underwater vehicle ISiMI′using optical terminal guidance[C]//OCEANS 2007-Europe.IEEE,2007:1 -6.
[3]WIRTZ M,HILDEBRANDT M,GAUDING C. Design and test of a robust docking system for hovering AUVs[C]//Oceans,2012.IEEE,2012:1 -6.
[4]JUN B H,PARK J Y,LEE F Y,et al. Development of the AUV‘ISiMI’and a free running test in an Ocean Engineering Basin[J].Ocean Engineering,2009,36(1):2-14.
[5]羊云石,顾海东.AUV 水下对接技术发展现状[J].声学与电子工程,2013,2:015.
[6]MCEWEN R S,HOBSON B W,BELLINGHAM J G.Docking control system for a 21”diameter AUV[C]//Proceedings of the Unmanned Untethered Submersible Technology Conference (UUST)2007,2007,85.
[7]STOKEY R,PURCELL M,FORRESTER N,et al. A docking system for REMUS,an autonomous underwater vehicle [C]//OCEANS′ 97. MTS/IEEE Conference Proceedings.IEEE,1997,2:1132 -1136.
[8]ALLEN B,AUSTIN T,FORRESTER N,et al.Autonomous docking demonstrations with enhanced REMUS technology[C]//OCEANS 2006.IEEE,2006:1 -6.
[9]HOBSON B W,MCEWEN R S,ERICKSON J,et al. The development and ocean testing of an AUV docking station for a 21”AUV[C]//OCEANS 2007.IEEE,2007:1 -6.
[10]MCEWEN R S,HOBSON B W,MCBRIDE L,et al. Docking control system for a 54 -cm -diameter (21 -in)AUV[J].Oceanic Engineering,IEEE Journal of,2008,33(4):550-562.
猜你喜欢
中国交通信息化(2022年9期)2022-10-28
防爆电机(2022年3期)2022-06-17
汽车工程师(2021年12期)2022-01-18
防爆电机(2021年3期)2021-07-21
防爆电机(2021年3期)2021-07-21
防爆电机(2021年1期)2021-03-29
发明与创新·大科技(2020年1期)2020-04-17
导弹与航天运载技术(2017年4期)2017-09-03
汽车实用技术(2017年3期)2017-03-03
智能制造(2016年11期)2017-01-03