嵌入式船舶人员落水搜救控制系统的设计与研究
2015-12-07 05:21蔡红梅
舰船科学技术 2015年11期
蔡红梅
(集宁师范学院 计算机系,内蒙古 乌兰察布012000)
0 引 言
现代水上和海上航运的繁荣,对海上和内河航运过程中人员落水搜救提出了更高要求。水上搜救是指国家或者部门针对船舶落水事故做出的搜寻、救援等工作。落水人员的搜救是一个技术性很强的系统工程,需要对海上搜救系统加大研发投入。当前舰载式落水人员的搜救系统主要由落水人员的视觉定位系统组成,通过定位能在接到求救信号后第一时间定位到落水人员尽可能准确的位置,缩小搜救范围,缩短救助时间,提高落水人员的生存概率[1-3]。
随着计算机视觉采集系统研究的深入,当前舰载搜集系统主要基于计算机视觉系统分析,引入人工智能、模式识别和图像处理和水动力学等学科知识,实现对落水人员的控制系统设计。系统主要包括落水人员的相关特征数据分析和采集、图像分析系统和嵌入式搜救系统等,由此设计人员落水搜救系统,提高船舶水上事故的导致人员落水后的救援能力。当前的落水搜救系统主要采用红外和人眼识别[4],搜索效率不高,针对这一问题,本文对传统舰载式落水人员搜救系统进行改进设计。
1 总体设计与图像特征数据采集
1.1 舰载式搜救系统的总体设计
嵌入式人员落水搜救系统是通过对水下压力、落水人员的视觉特征等物理特性,实现对落水人员的准确检测。本文提出基于嵌入式遥感视觉定位和激光通信的落水人员搜救特征提取方法,该控制系统采用嵌入式Linux 操作系统设计,基于亮点模型衍射的方法实现视觉穿透,实现落水人员的视觉图像特征采集,系统总体设计流程如图1所示。

图1 落水人员控制系统总体设计Fig.1 Overall design of the control system for the ship drowning persons
落水人员的搜救闪烁探头输出的电脉冲信号进行落水人员的视觉特征和落水部位的水位压力等物理特征进行检测,首先通过高速峰值检测器进行峰值检测,一旦检测到脉冲峰值,表示可能存在落水人员,就通过后面的峰值保持器将峰值保持住,然后通过低速A/D 将峰值电压进行量化,转为数字信号,把该数字信号输入到嵌入式控制系统中,进行数据分析[5]。通过嵌入式遥感视觉定位,实现落水人员的视觉定位,把脉冲幅度通过激光通信上输入到检测系统中,每个数字信号对应单片机内存中的一个地址,称为一道,每收集到一个脉冲,就在相应的道值上加1,由此实现海上搜救。
本文对落水人员搜救系统的设计主要包括特征数据采集和图像处理算法设计部分,作为系统的核心控制算法;另外还包括系统的硬件设计部分。
1.2 主要搜救算法的设计
落水人员特征数据采集包括图像数据采集和水上物理信息采集,本文提出一种基于嵌入式遥感视觉定位方法,基于亮点模型衍射的方法实现视觉穿透,进行图像特征数据采集,采用Huygens-Fresnel 原理[6],结合Fraunhofer 圆孔衍射算法,设计了海水湍流信道模型,提高激光通信在海水中的穿透力和衍射能力,为定位落水人员提供准确的数据基础。
首先构建海水散射模型,本文采用Gamma -Gamma分布的方法构建海水散射物理模型,采用Fraunhofer 圆孔衍射,进行落水人员的视觉特征提取,Fraunhofer 圆孔遥感衍射光路图如图2所示。
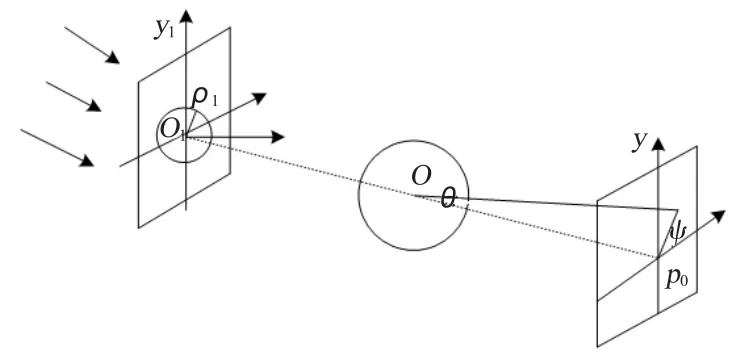
图2 Fraunhofer 圆孔遥感衍射光路图Fig.2 Fraunhofer hole diffraction optical remote sensing
采用激光在海水中衍射的方法实现视觉穿透,搜寻落水人员的目标信息,海水散射模型表达式为:

式中:I(x)为海水散射强度;J(x)为海水中进行遥感定位光线强度;A为海水湍流光子密度成分;t(x)为激光在海水中的穿透率,落水人员的数据信号采集和追踪过程中,特征数据和采集信号的感知双向。也就是说,由于受周围环境的影响,采用无线射频设备技术,往往会采集到含有大量噪声的原始数据。对此,本文采用激光通信进行图像视觉传输,激光在海水中的穿透波长系数为:

其中,ai为激光在海水中的视觉穿透亮点衍射系数,通过式(2),构建激光通信对RFID 数据滤波模型,进行图像特征提纯,对RFID 数据进行过滤,只保留第一个被输出的标签数据,通过过滤后的RFID数据需要保持原来的采集顺序。基于亮点模型衍射的方法实现视觉穿透,由此得到落水人员目标定位优化函数表示为:
(2)预裂面开挖后的不平整度应≤15cm。预裂面不平整度通常是指预裂孔所形成预裂面的凹凸程度,其是衡量钻孔和爆破参数合理性的重要指标,可依此验证、调整设计数据。
式中:φ(·)为激光波长核空间映射函数,wTφ(xi),落水人员图像的散射模型表达式为:

式中,θ0为滤波器的方向;δθ为高斯函数的标准偏差。在视觉特征采集信道中,ηm(x,y)为红外遥感特征随落水人员动态分布变换的光斑强度。通过上述分析,实现了落水人员特征数据采集,为进行落水人员的搜索控制系统设计提供数据输入。
2 舰载式嵌入式搜救系统硬件设计
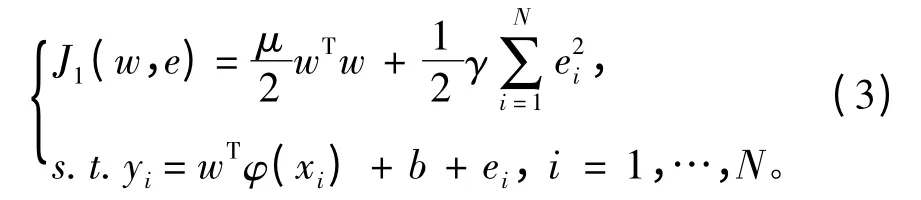
在上述进行嵌入式人员搜救视觉定位和激光通信的基础上,采用嵌入式的设计方法进行系统设计,系统主要由硬件模块和软件模块构成。该系统采用嵌入式Linux 操作系统设计,实现人员落水人员的视觉图像特征采集,在上述进行软件模块设计的基础上,进行硬件模块设计,整个嵌入式落水人员搜救系统硬件系统部分为5个子模块:传感器系统、AD 采集模块、ARM 主控系统模块、控制显示模块,供电系统[7-10]。系统硬件模块设计如图3所示。
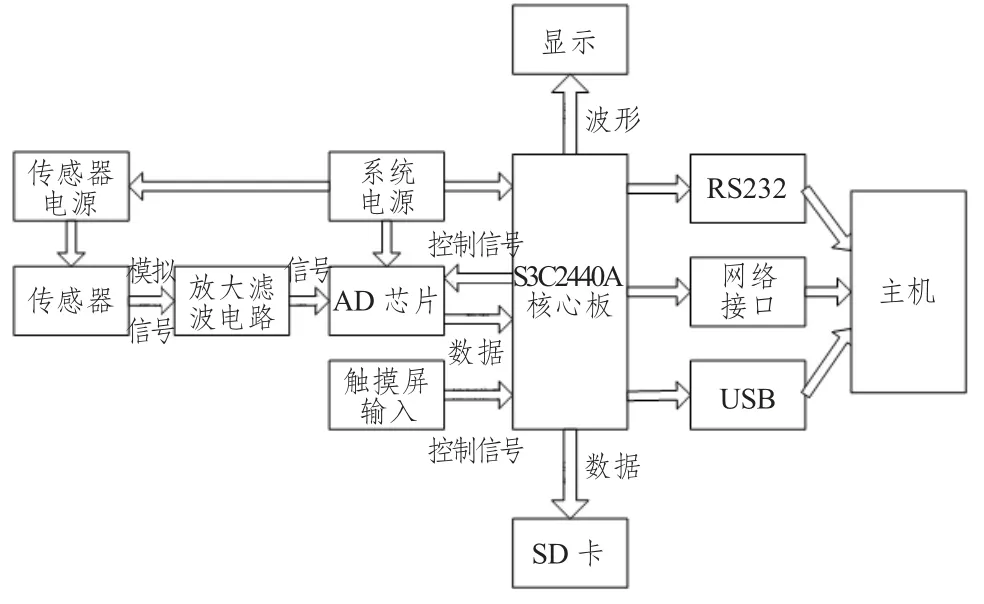
图3 系统硬件模块设计框图Fig.3 Block diagram of hardware module of system
其中,传感器模块包括绝压传感器、差压传感器和图像数据特征传感器。AD 采集芯片负责采集将经过搜救控制信号调理后转换为数字信号并传给主控系统进行后级的数字处理。ARM 系统模块的核心是ARM 嵌入式微处理器,进行嵌入式搜救控制,包括SDRAM,FLASH,NorFLASH 等。显示模块实现对落水人员目标定位数据的存储和图像显示。
滤波电路中使用的运算放大器同样为AD8034,为了优化图像定位精度,设计二阶低通滤波器,电路如图4所示。
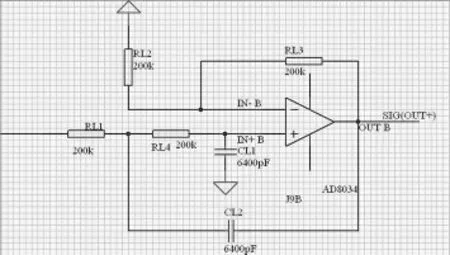
图4 搜救系统二阶低通滤波器Fig.4 Two order low-pass filter
低通滤波器电阻选用4个200 kΩ的贴片电阻,截止频率为:

在此基础上设计AD 系统,由信号接入、电源设计、控制电路3 部分组成,由于S3C2440的SPI接口被LCD控制接口和复位键的接口占用,采用嵌入式Linux,得到落水人员搜救的AD 数据特征采样电路如图5所示。
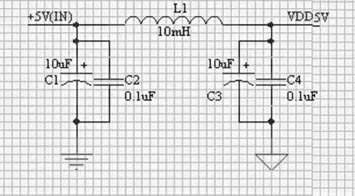
图5 落水人员搜救的AD 数据特征采样电路Fig.5 AD data feature sampling circuit for drowning personnel search and rescue
进行搜救控制模块设计,搜救控制模块核心是ARM控制器,由控制寄存器/显存、LCDDMA、LPC3600、VIDPRCS,落水人员的搜救控制模块电路如图6所示。
落水人员的搜救控制模块采用Linux 内核信,号接入DDATA3 (第1 脚)通过10 kΩ 电阻上拉到3.3 V,使SD 卡上电后自动进入SD 模式。本接口中该引脚用于卡上电后的模式选择。设备驱动程序是操作系统与硬件直接对话,其中:
SDCMD (第2 脚)为命令响应线,SDCLK (第5 脚)为时钟输入信号。
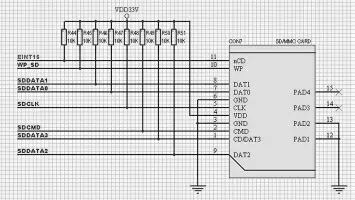
图6 落水人员的搜救控制模块电路Fig.6 Rescue and control module circuit for ship drowning personnel
DAT0~ DAT2 (第 7、8、9 引 脚) 加 上SDDATA3 组成4 位数据线。
EINT16 (第11 脚)为卡插入检测信号。保证输入的稳定性,除VDD、GND 外的引脚均通过10 kΩ 上拉到3.3 V。
最后进行系统电源供电,系统的输入电源中有一路为3.3 V,因此无需额外芯片来产生,采用10 μF和0.1 μF的电容并联来进行电源滤波,为了减小接线电感,采用0402的小封装,再并联一个10 μF 电容,用于储能,防止电压突变,采用0805 封装。搜救系统的电源供电模块电路如图7所示。

图7 搜救系统的电源供电模块电路Fig.7 Power supply module circuit for rescue control system
通过上述设计,完成了嵌入式人员落水搜救系统的设计,最后进行系统仿真实验,测试本文设计的系统在提高搜救控制性能方面的优越性。
3 仿真实验与性能测试
为了测试本文设计的嵌入式人员落水搜救系统的性能,进行仿真实验。实验中,首先进行系统调试,调试过程使用的仪器仪表如下:
1)Tektronix TX3 JTAG 电路;
2)Agilent EEPROM 33220A 函数信号发生器;
3)INSTEK PST3202 可编程电源;
4)Agilent 混合示波器。
落水人员的视觉特征收发信号和转换信号进行独立的Gamma 校正;16 位Zoom Video 口;支持硬件光标,并可对光标进行透明度控制;芯片自动对内部当前未工作的模块进行关闭操作,最大可能地节省功耗;另外,M9 对外提供了很好的外部接口,其中包括PCI 总线接口,而显示图形板中的CPU 模块中,由于内嵌了PCI 总线控制器,这样可以方便地和M9通信,能够很好地满足波束指向性分析和应用研究,本文设计搜救系统的工作指标参数见表1。

表1 工作指标参数Tab.1 Acoustic array working parameters
根据上述仿真环境设计,进行落水人员搜救系统的信号采集,分析系统输出的电流电压和落水区域的差压压力和绝压压力,得到数据采集结果如图8所示。

图8 落水人员搜救系统的信号采集Fig.8 The signal acquisition of the rescue and control system of the ship drowning person
从图可见,采用本文设计的系统进行落水人员所在水域的相关物理特征数据采集,能较好地反应落水区域的水域特征,便于实现对人员的判断和定位,在此基础上进行遥感视觉定位和激光通信,基于亮点模型衍射的方法实现视觉穿透,实现人员落水人员的视觉图像特征采集,再结合本文设计的硬件系统实现对落水人员的位置信息热点跟踪,得到仿真结果如图9所示,图中A 区域部分即为落水人员的所在位置区域,分析可见,采用本文算法能准确实现对落水人员的视觉定位和特征提取,实现搜救智能控制,提高搜救效率。
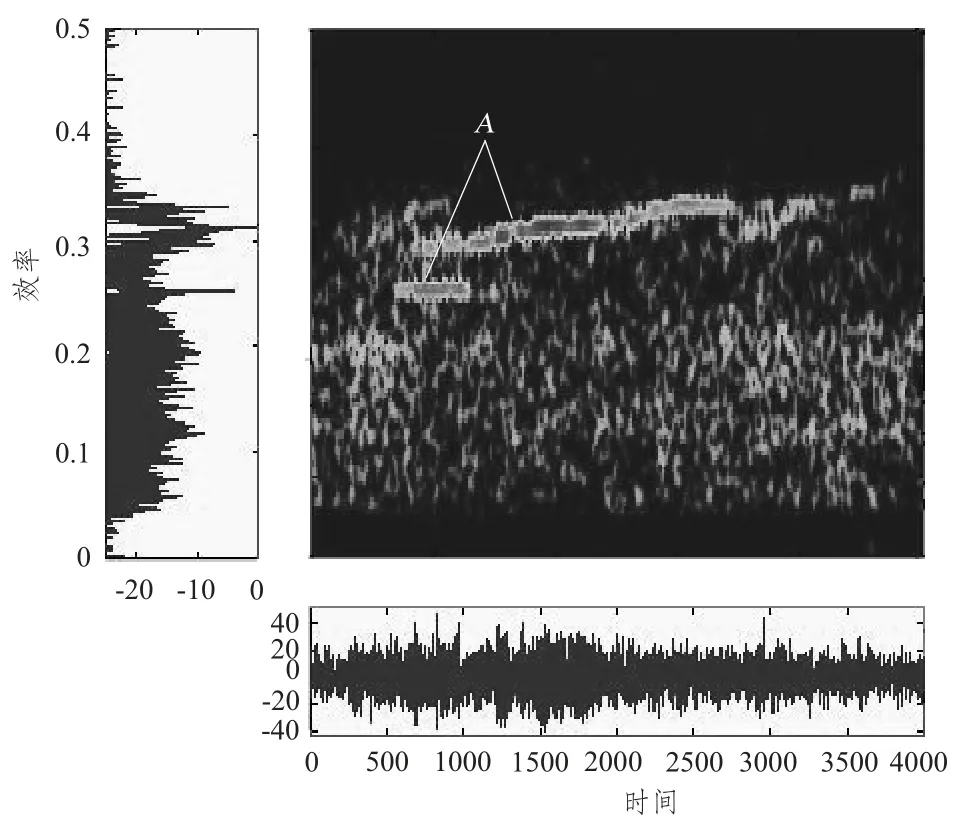
图9 落水人员搜救热点定位结果Fig.9 The hot spot location results of the rescue of the ship drowning persons
4 结 语
基于计算机视觉系统分析,引入人工智能、模式识别和图像处理和水动力学等学科知识,实现对落水人员的控制系统设计,系统主要包括落水人员的相关特征数据分析和采集、图像分析系统和嵌入式搜救系统等,提高船舶水上事故导致人员落水后的救援能力。本文提出一种基于嵌入式遥感视觉定位和激光通信的落水人员搜救特征提取方法,并采用嵌入式系统设计进行搜救系统实现,整个嵌入式落水人员搜救系统硬件系统部分为5个子模块:传感器系统、AD 采集模块、ARM 主控系统模块、控制显示模块,供电系统。本文完成了整个系统的软件算法设计和硬件电路设计,仿真实验结果表明,采用本文系统设计能有效实现对落水人员所在水域的相关物理特征数据采集,实现对人员的判断和定位,准确实现对落水人员的视觉定位和特征提取,提高搜救效率。
[1]周勇,甘新年.鱼雷制导控制系统多通道控制加权算法设计[J].现代电子技术,2014,37(19):14 -17.ZHOU Yong,GAN Xin-nian.The torpedo guidance control system for multi - channel control weighted algorithm design[J].Journal of Modern Electronic Technology,2014,37(19):14 -17.
[2]石鑫,周勇.基于信号峰脊陡变调制的雷达测距算法[J].物联网技术,2015,5(4):12 -14.SHI Xin,ZHOU Yong.The radar ranging algorithm based on signal peak modulation ridge abrupt change[J].Journal of Internet Technology,2015,5(4):12 -14.
[3]赵威.基于鱼雷自导的舰船尾流回波模型建立方法[J].舰船电子工程,2013,33(4):81 -83.ZHAO Wei.Methods based on torpedo homing ship wake echo model[J].Journal of Ship Electronic Engineering,2013,33(4):81 -83.
[4]刘家亮,王海燕,姜喆,等.垂直线列阵结构对PTRM 阵处理空间增益的影响[J].鱼雷技术,2010,18(4):263-267.LIU Jia-liang,WANG Hai-yan,JIANG Zhe,et al.The vertical line array structure on PTRM array processing spatial gain[J].Torpedo Technology,2010,18(4):263-267.
[5]刘昊晨,梁红.线性调频信号参数估计和仿真研究[J].计算机仿真,2011,10(14):157 -159.LIU Hao-chen,LIANG Hong.Parameter estimation of LFM signal and simulation study[J].Computer Simulation,2011,10(14):157 -159.
[6]邓异,梁燕,周勇.水声换能器基阵信号采集系统优化设计[J].物联网技术,2015,5(4):36 -37,41.DENG Yi,LIANG Yan,ZHOU Yong.Underwater acoustic transducer array signal acquisition system optimization design[J].Journal of Internet Technology,2015,5(4):36-37,41.
[7]刘美莲,李爽.远距离弱小目标视觉测量系统探测能力模型研究[J].科技通报,2012,28(8):177 -180.LIU Mei-lian,LI Shuang.Long-distance weak target detection capacity model research visual measuring system[J].Science and Technology,2012,28(8):177 -180.
[8]郭晓艳.油田管道不定衰减水声信号的仿真分析[J].计算机仿真,2014,31(3):118 -121.GUO Xiao-yan.Oil pipeline and attenuation of underwater acoustic signal simulation[J].Computer Simulation,2014,31(3):118 -121.
[9]邹胜宇,刘振,高海波,等.基于干扰力时间积分的悬吊漂浮物随动控制方法[J].机器人,2015,37(1):1-8,16.ZOU Sheng-yu,LIU Zhen,GAO Hai-bo,et al.Tracking control method for suspended floater based on time integral of disturbance force[J].Robot,2015,37(1):1 -8,16.
[10]王磊,刘海涛,梁滔,等.低频伺服力激励下进给系统建模与动态响应分析[J].机械工程学报,2015,51(3):18-28.WANG Lei,LIU Hai-tao,LIANG Tao,et al.Modeling and analysis of dynamic response of servo feed system under low frequency excitation [J].Journal of Mechanical Engineering,2015,51(3):18 -28.
猜你喜欢
中学生数理化·七年级数学人教版(2022年6期)2022-06-05
家庭影院技术(2021年7期)2021-08-14
昆明医科大学学报(2021年6期)2021-07-31
科学(2020年5期)2020-11-26
导航定位与授时(2020年5期)2020-09-23
中国外汇(2019年20期)2019-11-25
电子制作(2019年7期)2019-04-25
电子制作(2018年16期)2018-09-26
海峡姐妹(2018年2期)2018-04-12
电子制作(2017年8期)2017-06-05