
直流蒸汽发生器分区域比例积分微分给水控制系统研究
2015-12-02 03:08刘志宏陈保同刘现星刘翠英
核科学与工程 2015年1期
郭 研,刘志宏,陈保同,刘现星,刘翠英
(武汉第二船舶设计研究所,湖北武汉430064)
直流蒸汽发生器(OTSG)具有体积小、结构简单、负荷跟踪快、热效率高等优点,国内外研究和应用广泛。但由于OTSG热容量小、受外界扰动影响大,工作稳定性不如自然循环蒸汽发生器,在负荷变动过程中,参数波动幅度较大[1,2]。因此,OTSG的运行对安全性和稳定性要求较高,需要OTSG的控制系统具有较好的动态性能[3]。
本文针对OTSG给水控制系统中给水调节阀开度和给水泵转速对蒸汽压力和调节阀前后压差的相关性,提出一种分区域控制方法,将该方法引入到常规比例-积分-微分(PID)控制系统中,并结合三冲量控制方法,设计出三冲量分区域PID给水控制系统。
1 常规直流蒸汽发生器PID给水控制系统简介
OTSG给水控制由给水泵和给水调节阀串联组成。给水泵主要通过调节转速来维持给水调节阀前后压差为定值[4],以保证给水调节阀的线性特性,再通过调节给水调节阀开度以改变管道阻力特性来调节给水流量,来达到对蒸汽出口压力的控制。
给水调节阀控制和给水泵控制均采用常规PID控制[5],控制原理如图1所示。G(s)为被控物理过程的传递函数,D(s)为控制器传递函数,Gv(s)为执行器传递函数,Gm(s)为测量变送器传递函数。X(s)为系统输入,Y(s)为系统输出,u(s)为控制器输出。
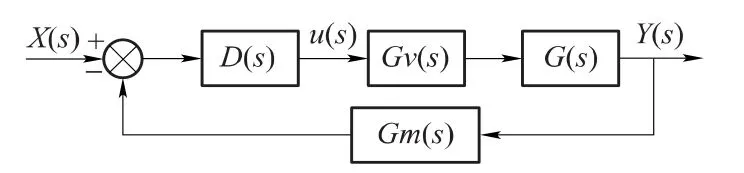
图1 闭环控制系统原理框图Fig.1 Schematic of closedloop control system
(1)给水调节阀控制:X(s)为蒸汽出口压力期望值;Y(s)为蒸汽出口压力实际值;u(s)为给水调节阀开度。
(2)给水泵控制:X(s)为给水调节阀前后压差期望值;Y(s)为给水调节阀前后压差实际值;u(s)为给水泵转速。
常规PID控制系统通过比例环节、积分环节、微分环节对误差信号进行处理并产生控制输入量,进而对被控对象进行控制[6]。其控制规律为:

式中:Kp为比例系数;TI为积分时间参数;TD为微分时间常数;e(t)为误差。
由于给水调节阀开度和给水泵转速的变化均会对给水流量和给水调节阀前后压差产生影响,耦合性很强。在实际运行过程中,两种控制同时作用,给水泵控制要求能够对给水调节阀前后压差有一个很好的响应,将前后压差控制在期望值附近,以保证给水调节阀的线性特性。但由于这种强耦合性的存在,系统在调节过程中,往往会产生震荡,超调量大,稳定时间长,控制效果不理想。
2 分区域PID给水控制系统设计
研究OTSG给水控制系统的特性可以发现,给水调节阀开度与蒸汽出口压力正相关,与给水调节阀前后压差负相关;给水泵转速与蒸汽出口压力、给水调节阀前后压差均为正相关。
本文基于给水控制系统这一特性,提出一种分区域控制方法,以蒸汽出口压力和给水调节阀前后压差两个变量,绘制二维直角坐标图,并根据这两个变量的运行状态以及给水调节阀和给水泵的运行特性划分区域,在不同区域采用不同的控制方案。分区域控制方案如图2所示,为便于分析比较,对数据进行归一化处理,给水调节阀前后压差和蒸汽出口压力均以各自期望值作为基准值1。
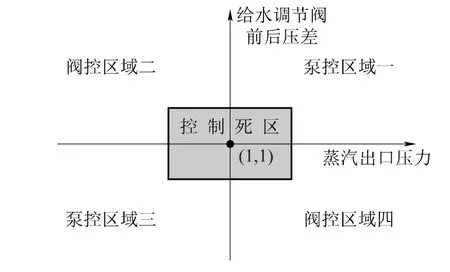
图2 分区域控制方案一Fig.2 Scheme 1of regional control
图2中,坐标原点为(1,1),是以给水调节阀前后压差和蒸汽出口压力均为各自期望值状态为中心的。在该坐标系中间位置灰色区域为控制死区,分别以给水调节阀前后压差和蒸汽出口压力在稳态时的运行范围为依据进行划分的,给水调节阀前后压差的范围是1±a,蒸汽出口压力的范围是1±b,a和b的值视各个系统和设备的情况而定。在控制死区内,给水调节阀和给水泵是不动的。在第一、三象限的非控制死区部分,分别为泵控区域一、三,只有给水泵参与控制,给水调节阀不动作;在第二、四象限的非控制死区部分,分别为阀控区域二、四,与之相反。
在常规给水控制系统中,假设系统状态处在图2中泵控区域一,给水调节阀开度减小,形阻系数增大,给水泵转速减小,扬程减小,给水流量减小,蒸汽出口压力减小,而给水调节阀前后压差的变化取决于给水调节阀形阻系数增大和给水泵扬程减小的综合效应。此时若蒸汽出口压力先接近期望值,而给水调节阀前后压差远大于期望值,则给水泵转速继续减小,给水流量,蒸汽出口压力会进一步下降,这样就会造成系统的反复震荡,不利于系统稳定。其他区域在控制过程中也会出现类似震荡现象。
而在分区域控制方案一中,坐标系中任何位置,即给水调节阀前后压差和蒸汽出口压力处于任意状态,给水控制系统只允许给水调节阀控制和给水泵控制其中之一投入。在泵控区域一,设定给水调节阀不动作,给水泵PID控制,转速减小,扬程减小,给水流量减少,蒸汽出口压力减小,给水调节阀前后压差减小;泵控区域三正好相反。在阀控区域二,设定给水泵不动,给水调节阀PID控制,阀门开度增大,给水流量增加,蒸汽出口压力增大,给水泵扬程减小,且由于给水调节阀处形阻系数变小,给水调节阀前后压差减小;阀控区域四正好相反。这样既达到对系统的控制要求,又避免了因给水调节阀和给水泵同时动作时的耦合性而引起的系统震荡和超调,系统稳定性很好。
但是分区域控制方案一也存在一些问题。在实际控制过程中采用的是PID控制,系统在最终达到稳态的过程中肯定会和期望值有一定的误差。在分区域控制方案一中会出现一种稳态情况,蒸汽出口压力和给水调节阀前后压差两个变量有一个稳定在期望值附近,但另外一个不在其稳态时的运行范围内,这就导致控制失败。在泵控区域一和泵控区域三中接近横坐标轴、阀控区域二和阀控区域四中接近纵坐标轴这四个位置是分区域控制方案一的不可控区域,系统状态有可能会稳定在这四个位置时,导致控制失败。
本文在分区域控制方案一的基础上做了一些改进,不以坐标轴为区域划分界线,而是以蒸汽出口压力和给水调节阀前后压差在稳态时运行范围的上限和下限作为区域分界线的,形成分区域控制方案二,如图3所示,这就避免了分区域控制方案一中存在不可控区域的问题。

图3 分区域控制方案二Fig.3 Scheme 2 of regional control
但分区域控制方案二也存在一些问题。区域间的切换是以两个参数运行范围的上限和下限划分的,由此产生的超调量较大。因此,本文将方案一和方案二进行了综合,设定了四个双控区域(两种控制均存在),形成分区域控制方案三,如图4所示。既消除方案一中的不可控区域,又避免方案二中控制区域划分引起的超调量大问题,总体来说是比较理想的。
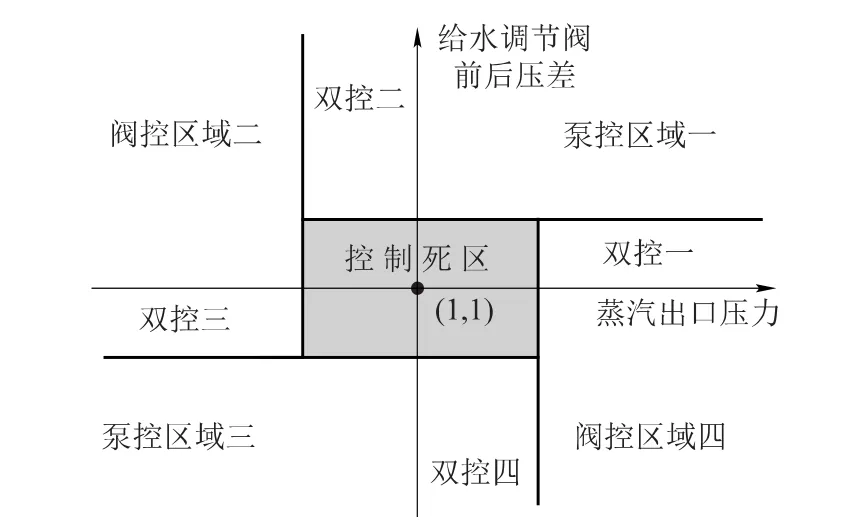
图4 分区域控制方案三Fig.4 Scheme 3 of regional control
3 三冲量分区域PID给水控制系统
为提高控制系统的抗干扰能力,将主要扰动信号反馈到控制系统中[2,6]。对OTSG扰动最大的是一回路平均温度、蒸汽流量和给水流量,因此,由这三种信号构成三冲量控制系统,通过比例环节馈入到分区域PID给水控制系统中,形成三冲量分区域PID给水控制系统,其原理如图5所示。
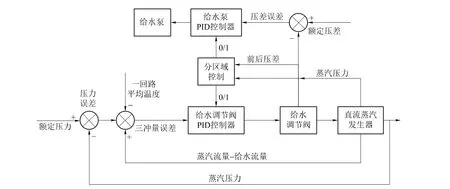
图5 三冲量分区域PID给水控制系统原理图Fig.5 Principle of three-parameter regional PID feedwater control system
以升负荷(20%~50%)和降负荷(50%~20%)为例,进行了三冲量分区域PID给水控制系统仿真研究如图5所示,并与常规PID给水控制系统进行了比较,计算结果如图6和图7所示。图中点线所指“常规PID”为采用常规PID给水控制系统时的仿真曲线;破折线所指“分区域方案二”以及实线所指“分区域方案三”分别为采用三冲量控制系统和分区域控制方案二、方案三相结合的PID给水控制系统时的仿真曲线。为便于分析比较,图中参数进行了归一化处理。
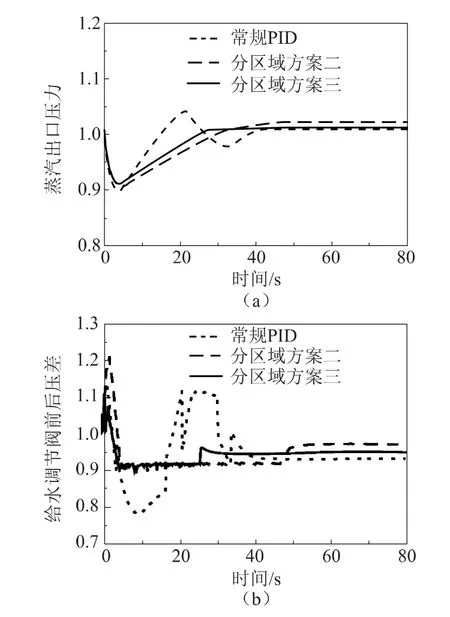
图6 升负荷(20%~50%)时控制仿真曲线Fig.6 Control simulation curve of load-rising(20%~50%)
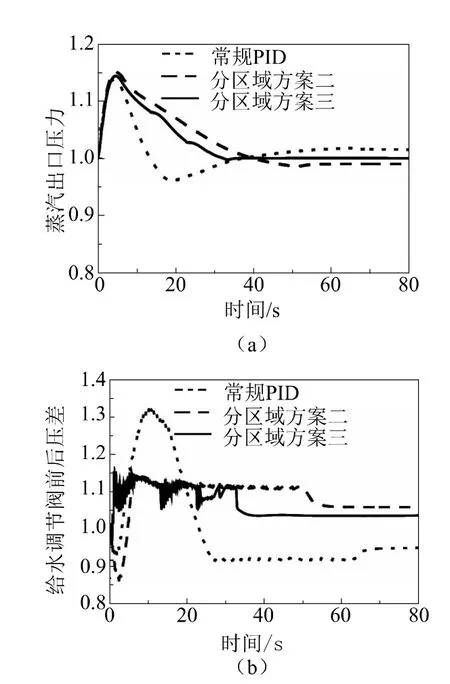
图7 降负荷(50%~20%)时控制仿真曲线Fig.7 Control simulation curve of load-descending(50%~20%)
由图6和图7可以看出,在负荷扰动情况下,与常规PID给水控制系统相比,采用三冲量分区域PID给水控制系统时,蒸汽出口压力变化幅度相差不大,但变化较为平稳,超调量更小;给水调节阀前后压差变化幅度变小,并很快进入正常运行范围内,保证给水调节阀的线性特性,系统稳定时间短。与分区域方案二相比,采用分区域方案三的三冲量分区域PID给水控制系统的蒸汽出口压力和给水调节阀前后压差变化幅度和超调量较小,且稳定时间更短,控制效果更理想。
由此表明,改进后的分区域PID给水控制系统较常规PID给水控制系统的效果较好,且具有良好的动、静态性能;采用分区域方案三的控制效果比分区域方案二的三冲量分区域PID给水控制系统更好。
4 结论
本文在OTSG给水控制系统特性研究的基础上,提出一种分区域控制方法;同时考虑一回路平均温度、OTSG给水流量和蒸汽流量的扰动,结合三冲量控制方法,最终构成三冲量分区域PID给水控制系统。对OTSG的控制仿真结果分析表明,三冲量分区域PID给水控制系统能够满足系统的控制要求,且参数变化较为平缓,超调量小,系统稳定时间短,控制效果理想。且三冲量分区域PID给水控制系统实现起来比智能控制系统更为简单,对OTSG控制系统的工程应用具有一定的指导意义。
[1] 付明玉,等.直流蒸汽发生器控制系统研究[J].核科学与工程,2002,22(2):108-112.
[2] 孙建华,等.直流蒸汽发生器给水控制半实物仿真系统[J].核动力工程,2008,29(1):121-128.
[3] 苏杰,等.直流蒸汽发生器的广义预测自校正控制仿真研究[J].核科学与工程,2007,27(3):224-229.
[4] 邱志强,等.船用蒸汽发生器给水控制系统仿真试验平台的设计与实现[J].舰船科学技术,2008,30(1):136-140.
[5] 张永生,等.船用冷凝器的真空与凝水过冷度控制系统研究[J].舰船科学技术,2011,33(3):62-64.
[6] 张宇声,等.基于模糊自适应参数整定的直流蒸汽发生器PID控制系统研究[J].核动力工程,2008,29(4):93-96.
猜你喜欢
设备管理与维修(2022年21期)2022-12-28
江苏广播电视报·新教育(2022年1期)2022-05-15
当代水产(2022年3期)2022-04-26
青海电力(2022年1期)2022-03-18
水泵技术(2021年4期)2021-11-20
航空发动机(2020年1期)2020-06-13
广西电力(2016年4期)2016-07-10
东北电力技术(2016年2期)2016-05-17
综合智慧能源(2015年1期)2015-06-05
物理通报(2011年8期)2011-01-24
