
基于MATLAB/Simulink的内涨式夹紧机构运动学仿真*
2015-11-23 03:04金晶,尹铁,周伦
机械研究与应用 2015年1期
金 晶,尹 铁,周 伦
(1.安瑞科廊坊能源装备集成公司,河北廊坊 065000;2.中国石油天然气管道科学研究院,河北廊坊 065000;3.廊坊职业技?术学院机械工程系,河北廊坊 065000)
0 引言
大口热煨弯管坡口机是加工热煨弯管两端坡口的专用机床[1],内涨式夹紧机构如图1所示是弯管坡口机的核心功能部件,可以实现小尺寸空间内利用热煨弯管的内径作为定位基准,实现弯管的夹紧定位,并确保与主轴同轴,保证弯管坡口的加工质量[2]。

图1 内涨式夹紧机构三维模型与机械结构图
涨紧机构有前后两套相同的连杆机构组成,液压缸无杠腔进油推动基盘运动,基盘带动连杆推动顶杆和涨紧块实现钢管的涨紧。在每组涨紧连杆机构上均匀布置15个涨紧块,由于采用多点涨紧,可以确保在涨紧过程中各个涨紧块受力均匀。
1 机构数学模型的建立
通过分析,将内涨式夹紧机构抽取为双滑块机构进行研究分析,双滑块机构是一个具有两个移动副的平面四杆机构,可以认为是由铰链四杆机构中两杆长度趋于无穷大而演变而来的[3]。图2给出了双滑块机构的运动示意图。

图2 双滑块机构运动示意图
在分析中,每一根杆件都可以表示成一个位移矢量,矢量的起点就是杆件的某一个端点,而杆件的其另一个端点就是矢量的终点。位移矢量的大小就是杆件的长度,矢量与x轴方向间的夹角就是杆件的夹角。闭环矢量方程是机构的各个构件之间连接约束的表达式,矢量方程易于求解,而且是进行机构分析所需采取的关键一步。矢量链是用来确定机构上某一点的位置。
对于双滑块机构,通过用位移矢量来代替连杆构件,建立闭环矢量。如图3所示,取两个滑块轨道的交点为坐标系的原点,原点到滑块1的位移矢量R1,坐标原点到滑块2的位移为位移矢量R2,连接滑块1和滑块2的连杆为位移矢量R3,可以利用位移矢量来表示机构列出双滑块机构的闭环矢量方程。

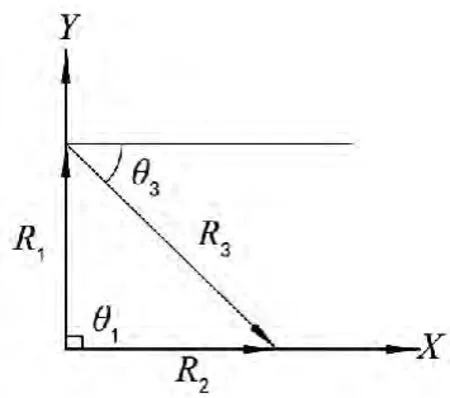
图3 双滑块机构位移矢量图
将矢量方程(1)沿x和y轴方向进行分解,可以得到两个标量方程:

由图3 可知,在式中 θ1=90°,θ2=0°,所以式(2)和(3)可以写成:

对方程式(4)和(5)求时间导数,有:

式中:ω为θ对时间的一阶导数。式(6)和式(7)是滑块速度之间的关系,再次求导,得到各构件加速度之间的关系为:

根据对内涨式机构的分析,滑块1为主动元件,滑块2为从动元件,即是主动件,是动力输入和α3为未知量,其中ω3和θ3可由α3积分后得到,所以,式(8)和式(9)可整理成:

2 程序文件编写及矩阵求解
Matlab/Simulink中的M命令可简单的理解成以若干命令语句的集合为内容的文件。在M文件中没有输入、输出参数,只是一些命令行的集合。在程序运行时,Matlab会自动按照顺序执行文件中的各个命令行。程序运行结束后,所产生的所有变量都留存在Matlab基本工作空间中,只要不使用删除指令,这些变量就会一直存储在基本工作空间中[4]。
编写一个Matlab函数来求解方程,这个矩阵的函数文件如下,存储于文件DoubleSlider.m中,文件的内容如下:
function X=DoubleSlider(u)%u(1)=R2_Acc%u(2)=Omega1%u(3)=Theta1 R1=140;
A=[R1*cos(u(3))-1;-R1*sin(u(3))0];
B=[R1*u(2)^2*sin(u(3));R1*u(2)^2*cos(u(3))-u(1)];
X=inv(A)*B;%AB
3 仿真模型的建立与求解
此函数可以用Matlab中的Function块嵌入到Simulink仿真系统中,并且在Simulink图形方式中,共有6个积分模块。把各个模块用连接线连接起来,得到图4所示的Simulink仿真窗口。将DoubleSlider.m文件嵌入到Function块中,即完成了Simulink仿真模型的建立。

图4 机构仿真框图

图5 滑块2位移距离
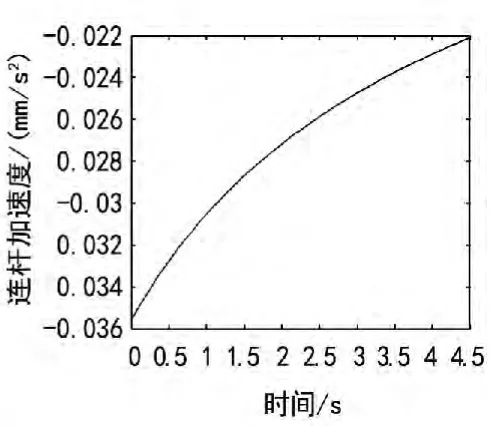
图6 连杆加速度
根据图2双滑块机构运动示意图,根据油缸工作各项参数可知,在不考虑油缸尼及爬行的情况下,假设油缸活塞杆匀速运动。则滑块1的各积分环节的积分初始值分别为v=20 mm/s,α=0 mm/s2,连杆初始θ3=47°。设定完毕后即可运行仿真,可得到图5~9的仿真结果。利用Matlab的Simulink仿真模型可以很容易得到机构各个构件的运动参数变化情况,具有可视化的特点。

图7 连杆角速度
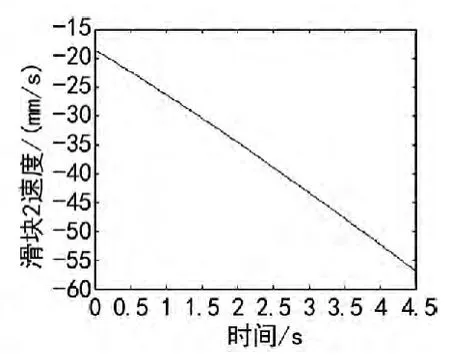
图8 滑块2速度

图9 滑块2加速度
4 结语
通过对内涨式夹紧机构进行运动仿真,形象的揭示了各个部件的运动规律,为今后相类似机构设计提供了全新的方法。通过对机构进行运动学仿真分析可为实际的生产和试验节约人力、物力和宝贵的时间,为今后热煨弯管坡口机成套化、系列化、标准化的设计具有重要的指导意义。
[1] 尹 铁,金 晶,贾世民,等.大口径热煨弯管坡口整形机的设计[J].管道技术与设备,2013(2):29-31.
[2] 尹 铁,金 晶,李铁军,等.一种新型浮动切削式热煨弯管坡口机的研制[J].机床与液压,2013,41(16):1-4.
[3] 金 晶.面向浮动切削坡口机的新型内涨式夹紧机构的研究[D].天津:河北工业大学,2013.
[4] 耿珠芳,李晓亮,刘 立.基于MATLAB的双滑块机构运动学仿真[J].冶金设备,2007(3):20-22.
[5] 屈文涛,王亚娟 ,邹 伟,等.基于SimMechanics的牛头刨式平面六连杆机构运动学仿真[J].机械研究与应用,2014,27(01):39-42.
[6] 王 芳,张海燕.基于SIMULINK的连杆机构运动学仿真[J].机械设计与研究,2004(2):35-37.
[7] 尹 铁.大口径热煨弯管坡口机浮动切削原理及动力学性能研究[D].天津:河北工业大学,2013.
猜你喜欢
中国金属通报(2022年1期)2022-06-02
锻压装备与制造技术(2021年2期)2021-07-19
大众文艺(2020年20期)2020-11-05
河北省科学院学报(2020年1期)2020-05-25
制造技术与机床(2018年11期)2018-11-23
酒·饮料技术装备(2018年1期)2018-04-28
中国国家旅游(2016年8期)2016-08-12
大型铸锻件(2015年4期)2016-01-12
应用科技(2015年5期)2015-12-09
海军航空大学学报(2015年1期)2015-11-11
