水下溢油数值模拟研究
2015-11-22 05:30陈海波尤云祥雷方辉赵宇鹏李建伟
海洋工程 2015年2期
陈海波,安 伟,杨 勇,尤云祥,雷方辉,赵宇鹏,李建伟
(1.上海交通大学 海洋工程国家重点实验室,上海 200240;2.中海石油环保服务(天津)有限公司,天津300452;3.中海油研究总院,北京 100027)
我国南海拥有丰富的油气资源,石油地质储量约为230 ~300 亿吨,占我国油气总资源量的三分之一,其中70%蕴藏于深海区域,但深水区域特殊的自然环境和复杂的油气储藏条件决定了深水油气勘探开发具有高投入、高回报、高技术、高风险的特点[1]。油气开采过程中的溢油事故时有发生,2010年美国墨西哥湾“深水地平线”溢油事故警示我们,油气勘探开发的高风险性应该受到足够的重视,同时开采深海油气资源的国家和公司也应该更加重视深海溢油的预防和治理。通过水下溢油数值模拟研究加深对水下溢油行为和归宿的认识,为水下溢油应急策略的制定提供技术支持,而一个好的水下溢油数值模型也有助于准确评估溢油对环境的影响。20 世纪70年代国际上就有一些学者开始致力于水下溢油数值模拟的研究,建立了一些溢油模型,例如浅水溢油模型McDougall[2]、Fannelop 和Sjoen[3]、Milgram[4]、Lee 和Cheung[5]、Yapa 等[6],深水溢油模型Johansen[7]的DeepBlow 模型、Zheng 等[8]的CDOG 模型。近几年,国内也有一些学者开展了水下溢油数值模拟研究,例如汪守东等[9]、王晶等[10]、高清军等[11]、廖国祥等[12-14],亓俊良等[15]。但与国外研究相比,目前国内还没有同时结合实验室数据和现场观测数据所进行的更充分的模型验证研究。
综合前人研究,将水下溢油过程分为三个阶段:喷发阶段、浮力羽流阶段和对流扩散阶段(见图1)。其中,喷发阶段在距离喷口几米范围内,由于溢油一般以一定的初始速度喷射而出,喷出的溢油会具有较高的动能(如果有气体溢出,动能会更高),溢油会因此分裂成大量直径不等的小油滴,这些小油滴和海水组成的油团在高动能状态下会继续运动一段距离。受到水环境的缓冲作用,溢油在运动几米后其初始动能很快损失殆尽,继而进入浮力羽流阶段。在浮力羽流阶段,溢油运动具有一定的“主动”性,其运动状态有别于水环境的流动状态,水环境通过浮力作用和卷吸作用间接地对溢油运动施加影响,这使油团持续抬升,体积不断扩大,其密度不断趋近于水环境密度。在这一过程中油团也会将部分底层水夹带至较浅的水域。当油团成长到一定程度,油团整体的浮力水平接近中性,其运动的主动性不再明显,溢油过程进入对流扩散阶段。在对流扩散阶段,由于油团体积较大,油滴比较分散,大量的油滴在水环境的流动和浮力的直接作用下被动地漂移和扩散。水下溢油的这三个阶段没有明显界线,并且前两个阶段也包含对流扩散过程,只是在前两个阶段中喷流/羽流过程占主导地位,而对流扩散过程相对较弱,可以忽略。前两个阶段都是将溢油当作一个整体研究,可以用羽流动力模型模拟,第三个阶段需要用对流扩散模型进行模拟。需要指出的是,如果溢油发生在浅水区,溢油过程可能只需用羽流动力模型模拟。本文基于水下溢油三阶段理论框架,通过分析溢油在水下环境的行为过程和影响因素,建立了一个水下溢油数值模型,并结合实验室水槽实验和水下溢油现场实验的观测资料进行模型验证。
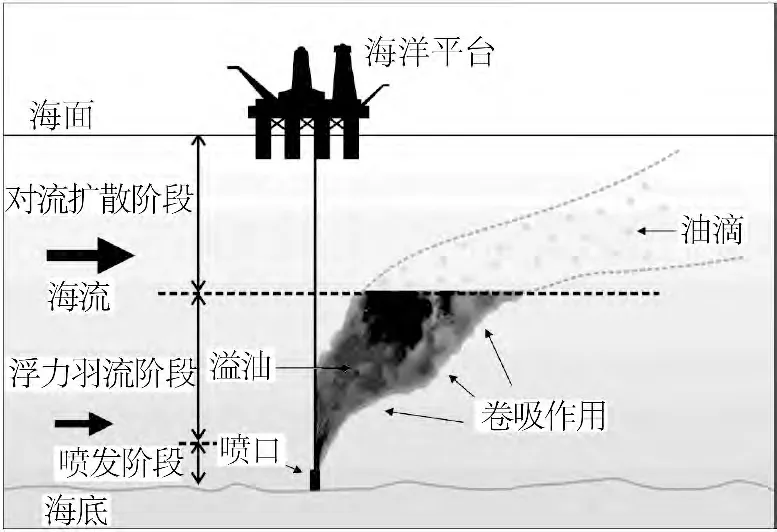
图1 水下溢油过程示意[8]Fig.1 Sketch of underwater oil spill process [8]
1 数值模型
该溢油模型由两个子模型组成,包括羽流动力模型和对流扩散模型,其中羽流动力模型模拟喷发阶段和浮力羽流阶段,将一定量的溢油视为一个整体油团,考虑油团与海水的相互作用;对流扩散模型模拟对流扩散阶段,将溢油离散为一定数量的“油粒子”,每个粒子代表一个由大量油滴组成的集合,并具有一定的质量、体积、浓度、油滴直径等属性,这些油粒子在海流的作用下漂移扩散。
1.1 羽流动力模型
羽流动力模型采用Lagrange 积分法模拟溢油的喷发阶段和浮力羽流阶段。如图2 所示,将溢油持续时间平均分为若干等份,时间步长为Δt,每一个时间步对应一小份溢油,将每一小份溢油看作一个圆柱形的控制单元体,控制单元体的半径为b(m),厚度为为控制单元体的移动速度(m/s),控制单元体质量为m = ρπb2h(kg),ρ 为控制单元体的密度(kg/m3)。控制单元体的底面法线平行于移动速度假设相邻两控制单元体之间互不影响。某一时刻所有控制单元体的中心连线即为该时刻的溢油轨迹。控制单元体的行为满足以下控制方程:
(1)质量守恒方程
控制单元体在运动过程中会因卷吸作用而发生质量变化,此过程满足以下质量守恒方程:

式中:ρa为水环境的密度(kg/m3),Qe为卷吸体积通量(m3/s)。

图2 羽流动力模型控制单元体示意[5]Fig.2 Sketch of control volume of plume dynamics model [5]
(2)动量守恒方程
溢油进入水环境后,会与周围水体相互作用导致动量变化,根据动量守恒可得到控制单元体的动量变化满足以下关系:

(3)热量、盐度和浓度守恒方程
溢油进入水环境后,会与周围水体发生物质交换,由此而导致的控制单元体的温度、盐度和浓度变化可用以下守恒方程描述:

式中:I 为一个标量,表示热含量(I = CpT)、盐度(I = S)或油浓度(I = C)。Cp为比热容(J/kg·K),T 为温度(K),水比热容Cp= 4 216.3 J/kg·K,油的比热容约为水的一半。
(4)状态方程
状态方程描述了控制单元体的密度与温度、盐度和浓度之间的关系。Neumann 和Pierson[16]给出了水密度的计算方法,Bobra 和Chung[17]则给出了多种油的密度计算公式。在本文的溢油模型中,控制单元体中的物质是油和水组成的混合物,控制单元体在成长过程中通过卷吸作用将周围海水不断纳入其中,导致控制单元体的温度、盐度和浓度发生变化,从而产生密度的改变。本文溢油模型考虑控制单元体的温度和盐度变化对密度的影响,并采用Bemporad[18]状态方程计算控制单元体的密度:

式中:ρ0表示参考密度值(kg/m3);βT和βS分别表示热量膨胀系数(℃-1)和溶质的膨胀系数(‰-1),本文分别取值为5 ×10-4℃-1和8 ×10-4‰-1;ΔT 和ΔS 分别表示温度和盐度的变化量。
(5)卷吸
溢油进入水环境后,卷吸作用是影响羽流形态和行为的主要因素。卷吸作用是指羽流表面与水体之间相互作用,使周围海水进入羽流中。根据Frick[19]和Lee 和Cheung[5]的研究,卷吸作用可分为两部分:剪切卷吸和强迫卷吸。其中,剪切卷吸是由溢油运动导致的油团与水环境之间产生的剪切应力引起的,即使水环境是静止的,剪切卷吸依然存在;强迫卷吸是在流动的水环境中水流迫使海水通过羽流的迎风面进入油团内部引起的,强迫卷吸存在的前提为水环境是流动的。据此,本文溢油模型将卷吸体积通量Qe分为两部分计算:

式中:Qs代表剪切卷吸体积通量(m3/s),Qf代表强迫卷吸体积通量(m3/s)。剪切卷吸体积通量(Qs)采用Fischer[20]提出的公式进行计算:

式中:α 为卷吸系数。Schatzmann[21-22]基于大量喷射流的研究,由动能方程和动量方程推导出了卷吸系数的计算公式,Lee 和Cheung[5]通过将该计算公式与喷射流实验数据进行对比,给出了卷吸系数的具体计算形式:
另一方面,如果水环境是流动的,羽流与水环境之间还存在强迫卷吸,强迫卷吸体积通量(Qf)可表达为:

式中:Qfx、Qfy和Qfz分别为强迫卷吸在x、y 和z 方向上的分量。Frick[19]认为强迫卷吸由增长项、圆筒项和弯曲项三部分组成。其中,增长项由溢油轨迹半径的增大导致;圆筒项由羽流侧面投影到水流上的面积导致;弯曲项由溢油轨迹的弯曲导致。基于Frick[19]的研究,Lee 和Cheung[5]推导出同向水流中三维溢油强迫卷吸体积通量的表达式:

式中:ua、va、wa分别为水流在x、y、z 方向的分量;θ 为控制单元体的速度矢量在水平面上的投影与x 轴的夹角(图2);为控制单元体在一个时间步内的位移大小,Δx、Δy、Δz 分别表示控制单元的体位移矢量在x、y、z 方向的分量。式(10)~式(12)等号右端括号中的三项分别为增长项、圆筒项和弯曲项的具体表达式。
1.2 对流扩散模型
油团上浮到一定高度后,由于卷吸了大量海水,其密度与水环境的密度已经非常接近,尤其在密度层化的水环境中,油团会夹带着来自于底层密度较大的水体,上浮到一定高度后其密度会等于甚至超过周围水体的密度,这使油团失去浮力的动力支持而无法继续抬升。然而,实际溢油事故并非如此。实际上,当油团发展到一定程度,油团内外的海水性质和湍流强度已经相差很小,羽流动力过程不再占主导地位,而水环境中的对流扩散过程开始主导溢油的运动,因而浮力羽流动力模型不再适用。取而代之,利用对流扩散模型继续模拟溢油的行为。对流扩散模型的控制方程(对流扩散方程)为:

方程(13)可以用多种数值方法求解[24-25],如有限差分法和有限元法,数值方法的主要困难在于稳定性问题,即数值离散过程中可能会引进与物理扩散无关的数值扩散,数值扩散很大时,会使模拟结果失真,不能描述真实的物理过程。另外,还有一些过程难以用对流扩散方程模拟,如比较典型的非Fick 扩散问题[26]。对于溢油模拟,更多的学者采用的是Lagrange 粒子追踪法(也叫随机走动法),该方法是将溢油离散为一定数量具有拉格朗日性质的“油粒子”,每个粒子具有一定的质量、体积、浓度等属性,粒子的平流过程主要受控于海浪、海流等环境动力过程的影响,可用确定性方法模拟,海洋湍流引起的扩散过程具有随机性,用随机运动来模拟。通过统计所有粒子的位置,可以确定溢油在海洋环境中的时空分布。Lagrange 粒子追踪法,很早就在海洋和大气研究中有着应用[27],Johansen[28]和Elliott[29]首先将此方法应用于溢油模拟(用于溢油模拟时也称油粒子法)。该方法不仅避免了数值离散方法本身带来的数值扩散问题,同时还可以准确重现海上油膜的破碎分离现象,准确描述溢油的真实扩散过程。大量研究表明,将该方法用于溢油模拟是行之有效的[30-33]。
本文溢油模型利用Lagrange 粒子追踪法模拟溢油的对流扩散过程。具体地,油粒子在三维空间中的运动满足以下关系:


式中:R 为在区间 [-1,1] 内均匀分布的随机数。
油滴的浮力速度wb由油滴的直径和密度以及海水的粘度和密度决定,可以根据油滴直径大小分两种情况计算[32]。首先定义一个临界直径

式中:μ 表示海水的动力粘度,量级为10-3Ns/m2;ρ 和ρa分别为油滴和海水的密度。当油滴直径d <dc时,根据Stokes 定律计算浮力速度:

当油滴直径d ≥dc时,根据Reynolds 定律计算浮力速度:

具体计算中,将油粒子所在的控制单元体在浮力羽流阶段终结时的位置作为该油粒子在对流扩散阶段的初始位置。对于浮力羽流阶段终结的判断指标,Yapa 等[32]在层化的水环境中进行溢油模拟时将油团与水环境的密度差,作为判断是否终结羽流动力模型的依据。Dasanayaka 和Yapa[33]对比了多个终结标指标的模拟效果,包括油滴速度指标(油团的上浮速度等于单个油滴的浮力速度)、中性浮力水平指标(油团的密度等于水环境的密度)和零速度指标(油团上浮速度为零),研究结果表明,油滴速度指标优于其他两个指标,并且基于平均油滴速度指标的溢油量估计更为准确。然而,在本文现场实验的模拟中,由于考虑了海水的层化情况,仍然采用中性浮力水平指标作为判断结束浮力羽流阶段的依据。
2 模型验证
为了检验本文水下溢油模型的准确性,将溢油模型应用到若干个水下溢油场景的数值模拟,并将模拟结果与实验数据进行对比。实验数据包括7 组来自实验室水槽模拟实验的观测数据和一组在现场实验中获取的观测数据,其中实验室数据包含了层化的和未层化的水环境中的喷流轨迹数据。
2.1 实验室水槽实验验证
首先通过数值实验将模拟结果与实验室水槽喷射实验的观测数据进行对比,对本文水下溢油模型的准确性进行检验。共进行7 个数值实验,分别考察了7 个喷射场景,考虑了不同的喷射条件和水环境层化情况。为区分不同的喷射场景,首先定义如下三个参数:

式中:带有下标0 的变量代表初始值,Fr 为Froude 数;g' = g (Δρ/ρ) ,Δρ = ρa-ρ;D 为喷嘴直径;St 为水环境的层化数;R 为喷射速度与水环境横流速度之比。各喷射实验的参数取值见表1。在二维喷射模拟实验中(实验编号1 ~实验编号5),为便于描述且不失一般性,将水环境的流向定义为x 轴的正方向,即( ua,0,0 )。
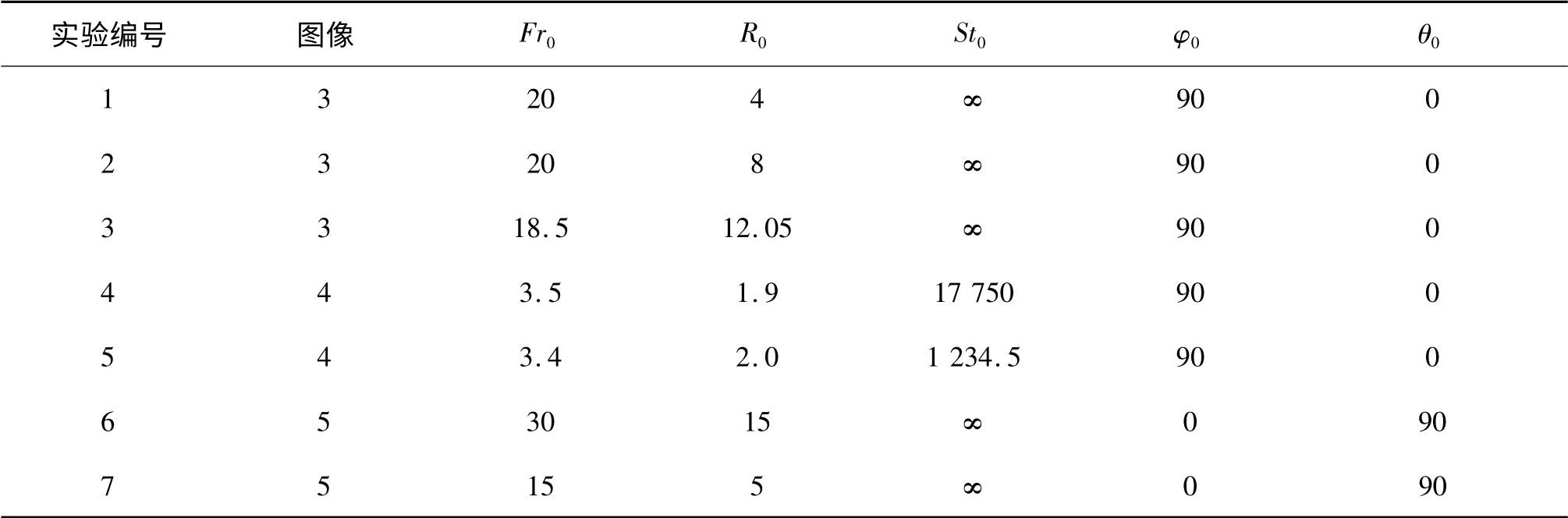
表1 实验室实验参数Tab.1 Laboratory experimental parameters
(1)未层化水环境中二维溢油模拟实验验证
数值实验1、2 和3 考察了在未层化且存在水平横流的水环境中的二维溢油轨迹,三个实验的喷射方向均垂直向上。图3 给出了三个实验中羽流控制体中心点的移动轨迹,并分别与Hirst[34]的三组实验室水槽观测数据进行了对比,可以看出,本文溢油模型的模拟结果与实验数据具有很好的一致性。图3 表明,垂直向上喷射的溢油,在水平横流的作用下会向水流的下游漂移,这使溢油轨迹逐渐向下游倾斜,参数R0越大,倾斜程度越大。实际上,在初始时刻,油团的动量方向是垂直向上的,随后,油团通过卷吸作用从水环境中获得水平方向的动量,使水平方向的移动速度不断增加。同时,虽然浮力能够为油团提供向上的动量,但由于卷吸进来了大量垂向速度为零的水,最终导致油团向上的移动速度不断减小,这使羽流形状出现弯曲,当羽流成长到一定程度,溢油在水平方向和垂直方向的漂移速度均不再有明显变化,此后溢油轨迹趋近于一条斜线。
(2)层化水环境中二维溢油模拟实验验证
实验4 和实验5 考察了垂直向上喷出的溢油在层化水流中的移动轨迹。图4 将数值模拟的结果与Hirst[34]的实验室水槽观测数据进行了对比,可以看出,模拟值与观测值的一致性较好,模拟结果非常理想,这说明本文模型对于层化水环境中的溢油模拟也具有很好的适用性。

图3 未层化的水流环境中的溢油轨迹(数据源自Hirst[34])Fig.3 Trajectories for oil spilled in an unstratified flowing environment (data from Hirst[34])
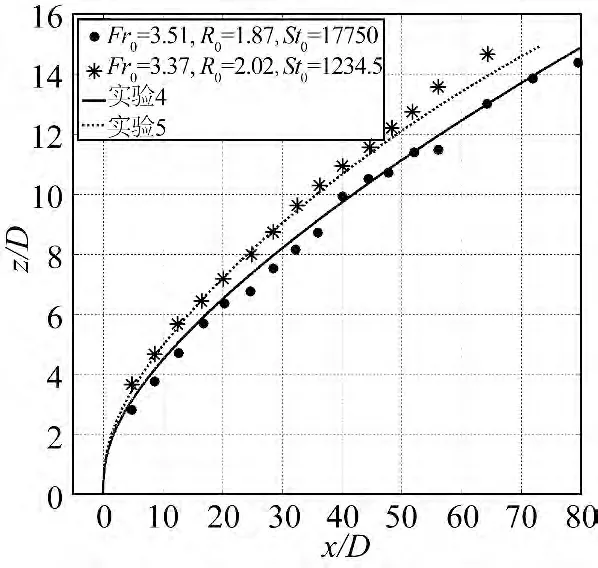
图4 层化的水流环境中的溢油轨迹(数据源自Hirst[34])Fig.4 Trajectories for oil spilled in a stratified flowing environment (data from Hirst[34])
(3)三维溢油模拟实验验证
下面利用Doneker 和Jirka[35]的两个实验室水槽溢油实验(未层化的水环境)观测数据检验本文溢油模型的准确性。在这两个实验中,溢油都是沿水平方向喷出,且喷射方向与水流方向垂直。在数值模拟中,将水流方向定义为x 轴的正方向,溢油的初始喷射方向为y 轴的正方向,见图5。

图5 三维溢油轨迹(数据源自Doneker 和Jirka[35])Fig.5 Three-dimensional trajectories for oil spills (data from Doneker and Jirka[35])
利用本文模型模拟的溢油轨迹和水槽实验的观测数据如图5 所示,其中图5(a)为溢油轨迹在xy 平面上的投影,图5(b)为溢油轨迹在xz 平面上的投影,图5(c)为溢油轨迹的三维图像。通过图5 模拟结果与实验数据的对比可以看出,总体而言,两个实验的模拟结果都比较理想。然而由图5(b)可以发现,在溢油的垂向抬升高度(仅由浮力作用决定)方面,实验6 的模拟结果要明显高于水槽实验的观测数据,这可能是由水槽实验的边界效应导致。如果提高水流速度(抑或保持流速不变,减小溢油喷射速度,从而削弱边界效应的影响),会使模拟结果与观测数据更为吻合,这一点在图5 中实验7 的结果对比中得到了证实。
2.2 现场实验验证
以上利用实验室水槽中的小型溢油实验验证了本文溢油模型中的羽流动力模型的准确性。如要继续检验另外一个子模型——对流扩散模型的准确性,从而完成对整个水下溢油模型的验证,还需要大型的现场溢油实验的支持。IKU、NOFO、Esso Norge 和Norsk Hydro 于1995年在北海的挪威海岸附近进行了大型的水下溢油实验,Rye 等[36]和Rye 和Brandvik[37]对这次实验进行了详细描述。表2 给出了该实验的参数设置,实验海区温度、盐度和密度的垂向结构以及当时的海流实测值分别见图6 和表3。Rye 等[36]通过分析现场拍摄的水下溢油图像指出,喷出的溢油首先以羽流的形式运动和变化,在上浮到一定高度后转变为由大量油滴组成的油团在浮力和海流的作用下被动地漂移扩散,转变区域在50 ~60 m 水深之间。根据声呐记录数据得到的溢油水下范围在东南-西北方向上的投影如图7 所示,其中不同深度的横线对应不同的观测时刻。现场观测还表明,溢油最早到达海面的时间为溢油开始10 min 之后。

表2 现场实验参数[36]Tab.2 Field experimental parameters [36]
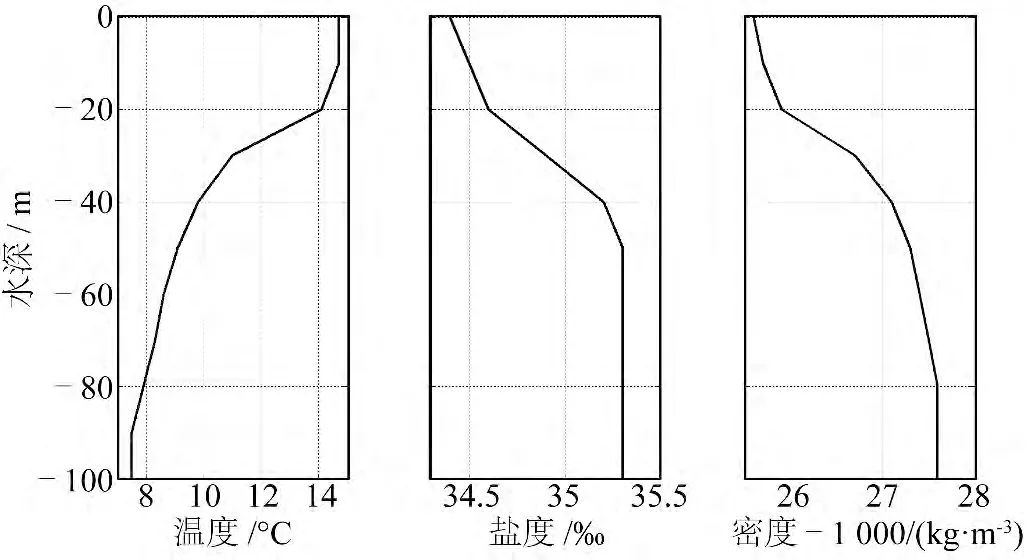
图6 现场实验海域的温度、盐度和密度的垂向结构[36]Fig.6 Vertical profiles of temperature,salinity and density of field experiment [36]

表3 现场实验的海流信息[36]Tab.3 Current velocity profile of field experiment [36]
基于表2 的实验参数以及表3 和图6 中的海洋环境数据,利用本文模型进行水下溢油模拟,其中,海流数据由表3 中的数值通过线性插值得到。油滴直径分布是对流扩散模型的一个重要参量,本文基于Delvigne[38]和Delvigne 和Sweeney[39]的实验室研究,假定油滴直径服从数学期望为250 μm,标准差为75 μm的正态分布,油滴直径的最小值取为10 μm,最大值则根据Rye 等[36]的记录取为5 000 μm。控制单元体通过卷吸作用从水坏境中不断吸收海水,其密度会随之增大,但由于海水的密度随着水深的减小而减小,当控制单元体上升到某一深度后,其密度会等于或大于其所在位置周围的海水密度。如前所述,在本文模型设置中,当控制单元体密度大于或等于周围海水密度时,终止羽流动力模型的计算,继而利用对流扩散模型取而代之。在模拟油粒子的随机运动时,将水平和垂向扩散系数在海面以下10 m 的深度内分别取为常数0.05和0.001 m2/s,由10 m 深度至海底,其取值线性减小[32]。
利用本文模型模拟的溢油分布在东南-西北方向的投影如图7 所示,投影的下半部分由羽流动力模型计算得到,上半部分由对流扩散模型计算得到。数值模拟结果表明,浮力羽流阶段的最大高度大约在52.1 m深度,溢油上浮至海面的最短时间为11.4 min,这说明本文模型的模拟结果与现场溢油实验的现场数据具有很好的一致性。尽管如此,由图7 还可以发现,数值模拟结果与观测数据之间也存在一定的偏差:(1)在100 m深度的羽流宽度小于观测值,据Rye 等[36]记载,在现场实验过程中,海洋波浪使喷油装置存在小幅度的上下颠簸,这会增大喷射流初期的卷吸作用,而在本文数值模拟中并未考虑这一点,从而导致羽流宽度的模拟值较小;(2)在溢油图像的上半部分(0 ~50 m 深度),溢油主体位置的模拟结果与观测数据之间存在一定偏移,其原因应该是,本文数值模拟所用的流场只是根据在4 个深度上测得的海流数据插值得到,因而在细节方面不够准确,而海流数据的精度能直接影响到对流扩散模型的模拟精度,另一方面,在现场观测时不能保证观测断面是严格地东南-西北方向的,存在一定的角度偏差,这也是导致本文模拟结果出现位置偏差的一个可能原因。综合以上两点考虑,本文模型对现场实验的模拟结果还是令人满意的,从而验证了本文模型的合理性和准确性。

图7 溢油水下分布在东南-西北方向的投影Fig.7 Projection of underwater oil spill in southeast-northwest direction
进一步结果分析表明,在浮力羽流阶段终结后,油滴直径的选取对数值模拟结果有较大影响。直径较大的油滴由于具有较快的浮力速度,能更快地到达海面,其运动轨迹更接近于垂直方向,并且由于受水下横流的影响时间较短,其到达海面的位置会更靠近溢油点;反之,直径较小的油滴到达海面的时间更长,其运动轨迹更接近于水平方向,并且到达海面的位置离溢油点也更远。
3 结 语
通过分析溢油在水下环境的行为过程和影响因素,基于Lagrange 积分法和Lagrange 粒子追踪法建立了一个水下溢油数值模型。该溢油模型由两个子模型组成,包括羽流动力模型和对流扩散模型,其中羽流动力模型采用Lagrange 积分法模拟喷发阶段和浮力羽流阶段,将一定量的溢油视为一个整体油团,考虑油团与海水间的相互作用;对流扩散模型采用Lagrange 粒子追踪法模拟对流扩散阶段,将溢油离散为一定数量的“油粒子”,每个粒子代表一个由大量油滴组成的集合,并具有一定的质量、体积、浓度、油滴直径等属性,这些油粒子在海水浮力和海流的共同作用下漂移扩散。
通过数值实验,结合实验室水槽实验和水下溢油现场实验的观测资料进行模型验证。数值实验考察了层化和未层化的水流环境中的水下溢油过程以及实际海洋中的水下溢油过程。通过对比模拟结果与观测数据,验证了本文水下溢油模型的合理性和准确性。进一步分析表明,在数值模型中,羽流动力模型的准确模拟能为对流扩散模型提供一个可靠的源,进入对流扩散阶段后,海流、海水的垂向密度结构和油滴的直径分布是影响溢油运动和分布的主要因素。该模型可以为水下溢油应急计划提供技术参考。
[1]李清平.我国海洋深水油气开发面临的挑战[J].中国海上油气,2006,18(2):130-133.(LI Qingping.The situation and challenges for deepwater oil and gas exploration and exploitation in China[J].China Offshore Oil and Gas,2006,18(2):130-133.(in Chinese))
[2]MCDOUGALL T J.Bubble plume in stratified environments[J].Journal of Fluid Mechanics,1978,85(4):655-672.
[3]FANNELOP T K,SJOEN K.Hydrodynamics of underwater blowouts[J].Norwegian Maritime Research,1980,(4):17-33.
[4]MILGRAM J H.Mean flow in round bubble plumes[J].Journal of Fluid Mechanism,1983,133:345-376.
[5]LEE J H W,CHEUNG V.Generalized Lagragian model for buoyant jets in current[J].Journal of Environmental Engineering,1990,116(6):1085-1106.
[6]YAPA P D,ZHENG L.Simulation of oil spills from under water accidents I:Model development[J].Journal of Hydraulic Research,1997,35(5):673-687.
[7]JOHANSEN Ø.DeepBlow-a Lagrangian plume model for deep water blowouts[J].Spill Science & Technology Bulletin,2000,6(2):103-111.
[8]ZHENG L,YAPA P D,CHEN F H.A model for simulating deepwater oil and gas blowouts Part I:Theory and model formulation[J].Journal of Hydraulic Research,2003,41(4):339-351.
[9]汪守东,沈永明.海底管线溢油数学模型研究[J].大连理工大学学报,2006,46(S1):191-197.(WANG Shoudong,SHEN Yongming.Study of mathematical model for oil spills from seabed pipeline[J].Journal of Dalian University of Technology,2006,46(S1):191-197.(in Chinese))
[10]王晶,李志军,GONCHAROV V K,等.渤海海底管线溢油污染预测模型[J].海洋环境科学,2007,26(1):10-13.(WANG Jing,LI Zhijun,GONCHAROV V K,et al.A forecast model on oil pollution of leaks from seabed pipeline in the Bohai Sea[J].Marine Environmental Science,2007,26(1):10-13.(in Chinese))
[11]高清军,褚云峰,林建国.海底管线溢油的数值模拟[J].大连海事大学学报,2007,33(S2):169-171.(GAO Qingjun,ZHU Yunfeng,LIN Jianguo.Mathematical simulation of oil spills from seabed pipeline[J].Journal of Dalian Maritime University,2007,33(S2):169-171.(in Chinese))
[12]廖国祥,高振会.水下溢油事故污染物输移扩散的数值模拟研究[J].海洋环境科学,2011,30 (4):578-582.(LIAO Guoxiang,GAO Zhenhui.Numerical simulation of pollutant transport and diffusion in underwater oil spill[J].Marine Environmental Science,2011,30(4):578-582.(in Chinese))
[13]廖国祥,高振会,杨建强.深海溢油输移扩散模型研究[J].海洋环境科学,2012,31(5):718-723.(LIAO Guoxiang,GAO Zhenhui,YANG Jianqiang.A model for simulating the transport and behavior of oil and gas released from deepwater[J].Marine Environmental Science,2012,31(5):718-723.(in Chinese))
[14]廖国祥,杨建强,高振会,等.深海中喷洒分散剂后溢油运动轨迹预测[J].大连海事大学学报,2013,39(2):103-107.(LIAO Guoxiang,YANG Jianqiang,GAO Zhenhui,et al.Numerical prediction of oil spill trajectory after dispersant application in deepwater environment[J].Journal of Dalian Maritime University,2013,39(2):103-107.(in Chinese))
[15]亓俊良,李建伟,安伟,等.深水区水下溢油行为及归宿研究[J].海洋开发与管理,2013,8:77-84.(QI Junliang,LI Jianwei,AN Wei,et al.Study on behavior and fate of oil spilled from deepwater[J].Ocean Development and Management,2013,8:77-84.(in Chinese))
[16]NEUMANN G,PIERSON W J Jr.Principles of physical oceanography[M].Prentice-Hall,Inc.,Englewood Cliffs N J,1996.
[17]BOBRA M A,CHUNG P T.A catalogue of oil properties[R].Report EE-77,Consultchem,Ottawa,Canada,March,1986.
[18]BEMPORAD G A.Simulation of round buoyant jet in stratified flowing environment[J].Journal of Hydraulic Engineering,1994,120(5):529-543.
[19]FRICK W E.Non-empirical closure of the plume equations[J].Atmospheric Environment,1984,18(4):653-662.
[20]FISCHER H B,LIST E J,KOH R C Y,et al.Mixing in inland and coastal waters[M].Academic Press,New York,1979.
[21]SCHATZMANN M.Calculation of submerged thermal plumes discharged into air and water flows [C]//Proc.18th IAHR Congress,Int.Assoc.for Hydr.Res.,Delft,The Netherlands,1979,4:379-385.
[22]SCHATZMANN M.Mathematical modelling of submerged discharges into coastal waters[C]//Proc.19th IAHR Congress,Int.Assoc.for Hydr.Res.,Delft,The Netherlands,1981,3:239-246.
[23]ZHENG L,YAPA P D.Simulation of oil spills from underwater accidents II:model verification[J].Journal of Hydraulic Research,1998,36(1):117-134.
[24]金梅兵.近岸溢油的全动力预测方法研究[J].海洋环境科学,1997,16(1):30-36.(JIN Meibing.Study on the method of the dynamical prediction of spill oil inshore[J].Marine Environmental Science,1997,16(1):30-36.(in Chinese))
[25]GOMEZ S,IVORRA B,RAMOS A M.Optimization of a pumping ship trajectory to clean oil contamination in the open sea[J].Mathematical and Computer Modelling,2011,54:477-489.
[26]刘伟峰,孙英兰.海上溢油运动数值模拟方法的探讨与改进[J].华东师范大学学报:自然科学版,2009,3:90-97.(LIU Weifeng,SUN Yinglan.Study and improvement of oil spill simulation methods[J].Journal of East China Normal University:Natural Science,2009,3:90-97.(in Chinese))
[27]CSANADY G T.Turbulent diffusion in the environment[M].Dordrecht,Boston,1973.
[28]JOHANSEN O.The Halten Bank experiment-observations and model studies of drift and fate of oil in the marine environment[C]//Proceedings of the 11th Arctic Marine Oil Spill Program (AMOP)Technical Seminar,Environment Canada,1984:18-36.
[29]ELLIOTT A J.Shear diffusion and the spread of oil in the surface layers of the North Sea[J].Deutsche Hydrographische Zeitschrift,1986,39(3):113-137.
[30]HUNTER J R.The application of Lagrangian particle-tracking technique to modelling of dispersant in the sea [C]//In Numerical Modelling:Application to Marine Systems,ed.Noye J,North-Holland,1987.
[31]WANG S D,SHEN Y M,GUO Y K,et al.Three-dimensional numerical simulation for transport of oil spills in seas[J].Ocean Engineering,2008,35:503-510.
[32]YAPA P D,ZHENG L,NAKATA K.Modeling underwater oil/gas jets and plumes[J].Journal of Hydraulic Engineering,1999,125(5):481-491.
[33]DASSANAYAKA L K,YAPA P D.Role of plume dynamics phase in a deepwater oil and gas release model[J].Journal of Hydro-environment Research,2009,(2):243-253.
[34]HIRST E.Buoyant jets with three-dimensional trajectories[J].Journal of the Hydraulics Division,1972,98(11):1999-2014.
[35]DONEKER R L,JIRKA G H.CORMIXI:an expert system for hydrodynamic mixing zone analysis of conventional and toxic submerged single port discharge[R].Tech.Rep.EPA/600/3-90/012,U.S.Environmental Protection Agency,Athens,Ga,1990.
[36]RYE H,BRANDVIK P J,REED M.Subsurface oil release field experiment-observations and modelling of subsurface plume behavior[C]//Proc.19th Arctic and Marine Oil Spill Program (AMOP)Tech.Seminar,Vol.2,Environment Canada,Ottawa,1996:1417-1435.
[37]RYE H,BRANDVIK P J.Verification of subsurface oil spill models[C]//Proc.1997 Int.Oil Spill Conf.,Environment Canada,Ottawa,1997:551-577.
[38]DELVIGNE G A L.Natural and chemical dispersion of oil[J].Journal of Advanced Marine Technology Conference of Japan,1994,11:23-40.
[39]DELVIGNE G A L,SWEENEY C E.Natural dispersion of oil[J].Oil and Chemical Pollution,1989,4:281-310.
猜你喜欢
小主人报(2022年18期)2022-11-17
水下无人系统学报(2022年1期)2022-03-16
中国科技纵横(2020年16期)2021-01-27
实验技术与管理(2020年7期)2020-09-29
上海交通大学学报(2019年4期)2019-05-08
机电产品开发与创新(2018年5期)2018-10-16
化工学报(2016年12期)2016-12-14
材料工程(2016年8期)2016-09-02
工业设计(2016年7期)2016-05-04
中国石油大学学报(自然科学版)(2015年2期)2015-11-10