
基于ANSYS的六轴力传感器的模态分析
2015-11-17 12:11朱志涵纪林章
应用技术学报 2015年1期
张 珂, 朱志涵, 石 钢, 纪林章
(上海应用技术学院机械工程学院,上海 201418)
基于ANSYS的六轴力传感器的模态分析
张 珂, 朱志涵, 石 钢, 纪林章
(上海应用技术学院机械工程学院,上海 201418)
运用Solid Works对支架进行三维建模,通过ANSYS Workbench软件对六轴力传感器结构进行模态分析,求解出传感器的模态参数,并得到传感器的固有频率和振型特征,找出了六轴力传感器的薄弱环节.结果表明,整个传感器不会出现共振现象,具有很好的动态特性.模态分析结果为传感器的进一步优化设计提供依据,对传感器在工程应用方面有一定的价值.
六轴力传感器;模态分析;动态特性
在传感器的研究中,力传感器是最基本的一种,而六轴力传感器是一种新发展起来的传感器,它能同时转换多维力/力矩信号为电信号,可用于监测方向和大小不断变化的力以及测量加速度或惯性力等[1],因其能实时监测三维空间中的3个力分量和力矩分量,在国防科技、生物医疗、智能机械及民用工业等领域得到广泛应用,如飞行模拟器风洞试验、直升机旋翼空气动力学测量飞机起落架力学性能测试以及汽车行驶中轮力检测等.六轴力传感器作为六分量测力技术的核心元部件,逐渐成为传感器技术研究的热点,得到了国内外学者的广泛关注[2].
传感器对于随时间变化的输入量的响应特性称之为动态特性.其中动态响应特性可以分为稳态响应特性和瞬态响应特性[3].稳态响应特性是指传感器在振幅稳定不变的正弦式输入量的环境下的响应特性;瞬态响应特性则是指传感器在非周期和输入量环境下的响应特性.本文介绍了六轴力传感器的结构特点和作用,描述了模态分析理论,并利用Solid Works三维软件建立了其模型,借助ANSYS软件对传感器进行了振动模态分析,得出其前六阶固有振型及其相应频率.
1 六轴力传感器的结构特点和作用
六维力传感器从结构形式上大体上可分为直接输出型(无耦合型)和间接输出型(耦合型).直接输出型即六维空间力由测力元件直接检测或经简单计算求得.间接输出型检测的六维输出力与传感器检测到的每一力分量和力矩分量相关,需要通过各分力的耦合才能得到六维输出力[4].
六轴力传感器具有灵敏度高、刚性好、维间耦合小、有机械过载保护等特点.采用标准串口和并口输入输出,产品既可与控制计算机组成两级计算机系统,也可联接终端,构成独立的测试装置.
2 模态分析
模态分析的主要步骤有:三维实体建模、材料属性选定、定义边界条件、网格划分、求解结果、分析.
2.1 模态分析理论
模态分析主要研究结构和部件的振动特性,通过模态分析可获得固有振型和固有频率,它们是研究动力学的重要参数,所以在更加详细的动力学分析如谱响应分析、瞬态动力学分析、频谱分析中,模态分析起到很重要的作用.模态分析方法就是用无阻尼的各阶主振型所对应的模态坐标来代替物理坐标,使微分方程解耦,变成各个独立的微分方程.其中机械结构的动力特性主要取决于它的固有频率、主振型等模态参数.一个N自由度线性系统的运动微分方程为:

式中,[M]、[C]、[K]分别为机械振动系统的质量、阻尼和刚度矩阵;{x}及{F}分别为机械振动系统的位移响应向量和激励力向量.式(1)是耦合方程,当系统自由度较大时,求解比较困难.因此要将耦合方程转化为非耦合的独立方程组,这是模态分析首先要解决的问题[5].
对式(1)两边进行拉氏变换,得

令s=jω,则式(2)变为:


根据振型矩阵对于质量、刚度矩阵的正交性关系,阻尼矩阵也近似被对角化,则对式(4)前乘得

式中:Ki、Mi、Ci分别为模态刚度、模态质量、模态阻尼,φi为模态振型.由式(6)可知,通过使用模态坐标后,N自由度系统的动态响应相当于在N个模态坐标下单自由度系统的响应之后.运用归一化方法,使模态质量归一,记模态质量归一化后的振型为Φ,可以得到:

为模态固有频率,N自由度系统有N个固有频率.
2.2 三维模型创建
在Solid Works中建立和装配的六轴力传感器的三维模型如图1所示.

图1 六轴力传感器模型Fig.1 Six axis force sensor model
在Solid Works中建好三维模型,保存为Parasolid(-x_t)格式,这样导入到ANSYS软件中,式接口能正确读入,接着从ANSYS中导入Solid Works模型,在ANSYS中点击file-inport-PAR,在弹出的对话框中,选择后缀格式为x_t的parasolid文件,在Geometry中默认点击solids only,表示此次输入的是实体模型.将模型的几何结构导入ANSYS后,就可以进行ANSYS的前处理分析.在分析过程中,导入的模型与直接在ANSYS中所建立的模型没有太大区别,故对有限元分析无影响.
2.3 定义材料属性和边界条件设置
在三维软件Solid Works中建好和装配的三维模型导入到ANSYS Workbench后,对所要分析的模型进行材料属性定义,其中传感器材料选定为结构钢,其他参数:弹性模量为200 GPa,泊松比为0.3,密度为7.85×10-6kg/mm3.模态分析中,设定边界条件是很重要的一步,因为边界条件的设定会影响着部件的固有振型和固有频率[6].因此需要仔细研究模型的约束情况,在六轴力传感器中,将约束定义在传感器底面与支架连接的一面,约束类型选择Fixed Support,固定传感器底面端,以求解传感器的约束模态.
2.4 定义单元类型和划分网格
由于六轴力传感器的特征多为曲面,在Workbench中难以自动进行规整的六面体网格划分,因此利用ANSYS Workbench的Mesh功能对传感器采用四面体实体单元进行划分,单元类型选择带中间节点的四面体单元Solid92[7].如图2所示,模型节点数21 131;单元数11 251.

图2 网格划分Fig.2 Mesh generation
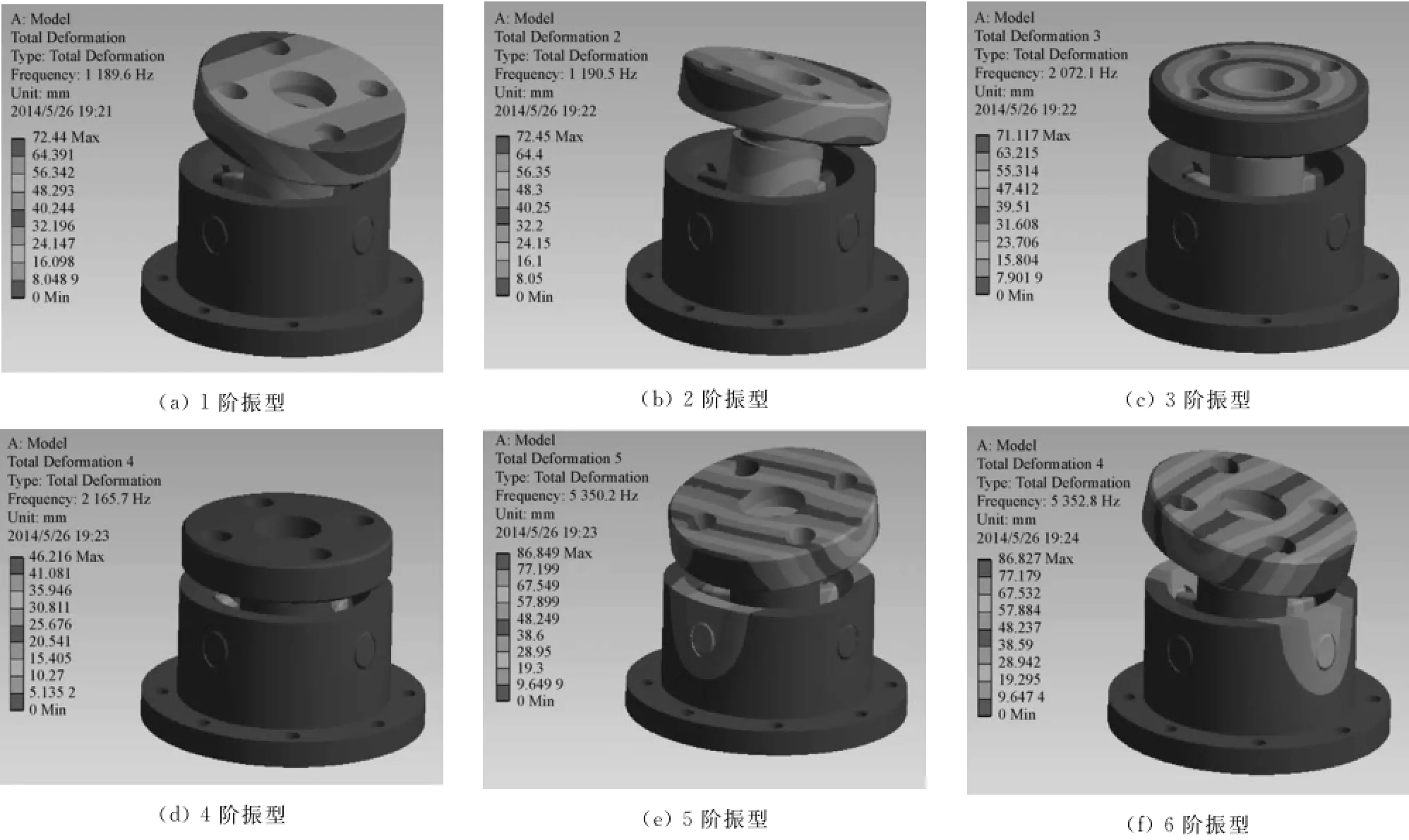
图3 传感器的前6阶振型图Fig.3 The first six figure mode shapes of the transducer
2.5 模态分析及其结果
利用ANSYS Workbench软件的模态求解器模块对六轴力传感器进行有限元分析计算,在Workbench中选择模型树下的Modal模块,并单击菜单栏Deformation中Total按钮,在弹出的定义框中Type中选择Total Deformation,Mode中分别选择1,表示为1阶振型,并按此步骤分别选择2、3、4、5、6,完成后选择Solve按钮进行模态分析.
根据模态分析可得到传感器体在前6阶的固有振型以及对应的固有频率情况.图3中(a)、(b)、(c)、(d)、(e)、(f)分别为六轴力传感器在ANSYS中分析前6阶的固有振型,表1为传感器的前6阶固有频率和最大总变形.
振型是结构的相对变形,反应了传感器所固有的振动表现形态.从振型图上来看,当传感器底座被固定住,1阶和2阶振型中连接盘变形比较大;3阶振型中,连接器的变形量从圆周外到中心处逐渐变小;4阶振型的整个连接盘的变形量比较均匀;5阶振型和6阶振型中变形趋势一样,连接盘的变形趋势由中心向两侧变化,并且变形是对称的[8].
通过传感器模态分析结果获取的前6阶固有振型及其相应的固有频率、最大总变形可知,1阶和2阶的振型相似,频率相差0.9 Hz,最大总变形仅相差0.01 mm,故可将一阶振型和固有频率当作传感器的固有振型和固有频率;在3阶振型和4阶振型中,两者振型相差较大,最大总变形相差28.901 mm,固有频率较相近,频差为93.6 Hz;在5阶振型和6阶振型中,频率相差2.6 Hz,最大总变形仅相差0.022 mm,在进行5阶振型和6阶振型分析时,可忽略6阶振型的影响.所以,通过有限元模态分析,可以得到形象直观的振型,便于分析,以满足六轴力传感器的结构优化设计的需要.
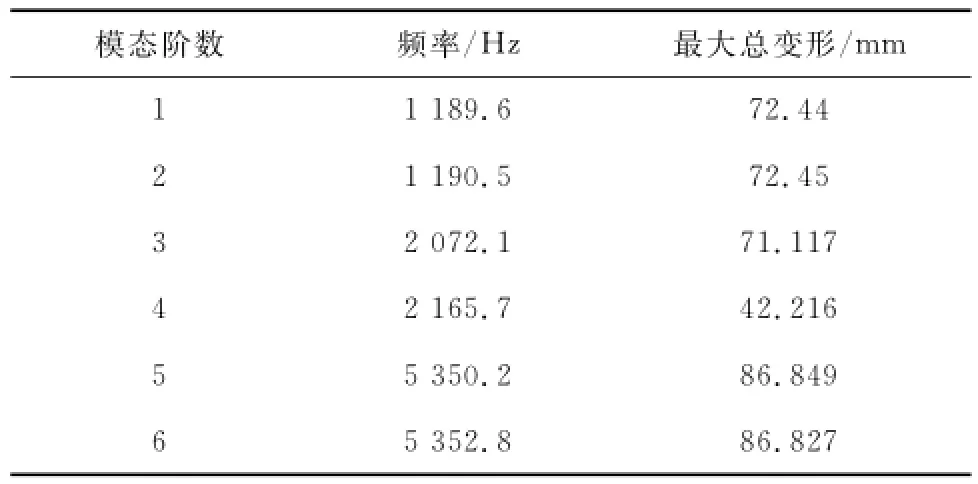
表1 传感器的固有频率和最大总变形Tab.1 The sensor’s inherent frequency and the maximum total deformation
3 结 语
本文通过ANSYS的Workbench模块对六轴力传感器进行模态分析,分别获取它的前6阶固有振型及其相应的固有频率,获得了传感器体的刚度分布和频率特性,为六轴力传感器的结构优化设计和动力学分析提供了重要参考.
[1] 茅晨,宋爱国,马俊青.新型六维腕力传感器[J].南京信息工程大学学报:自然科学版,2011,3(5):402-407.
[2] 姚建涛,孙锟,李立建,等.整体预紧式六维力传感器动态特性分析[J].仪器仪表学报,2014,35(5):1037-1043.
[3] 卞正岗.流程工业中传感器的发展[J].PLC&FA,2011(10):102-104.
[4] 张军,李寒光,李映君,等.压电式轴上六维力传感器的研制[J].仪器仪表学报,2010,31(1):73-77.
[5] 杨国旗,虞彪.基于ANSYS Workbench的发动机连杆有限元分析[J].装备制造技术,2011(10):23-25.
[6] 徐卫鹏.基于ANSYS Workbench的浮动油封力分析[J].煤矿机械,2011,32(10):124-126.
[7] 李大磊,张伟旺.基于Simulation的新型破碎机专用减速器箱体模态分析[J].矿山机械,2011,39(8):125-128.
[8] 李杨,李光.基于Solid Works的托盘结构有限元分析及优化设计[J].包装技术与工程,2011,32(19):1-3.
(编辑 俞红卫)
Modal Analysis of Six Axis Force Sensor Based on ANSYS
ZHANG Ke, ZHU Zhi-han, SHI Gang, JI Lin-zhang
(School of Mechanical Engineering,Shanghai Institute of Technology,Shanghai 201418,China)
The 3D modeling of the stent was realized by using Solid Works.The modal analysis of the sixaxis force sensor structure was made via the ANSYS Workbench software.In addition,the modal parameter of the sensor was solved and the natural frequencies and mode shapes characteristic of the sensor were obtained to identify the weakness of the six-axis force sensor.The results indicated that resonance phenomenon was not likely to take place in the sensor and had excellent dynamic property,which provided some basis for the further optimization of the design of the sensor and certain values in engineering application of the sensor.
six axis force sensor;modal analysis;dynamic characteristic
TP 391
A
1671-7333(2015)01-0063-04
10.3969/j.issn.1671-7333.2015.01.011
2014-09-04
上海市联盟计划项目(LM201482)
张 珂(1968-),男,教授,博士,主要研究方向为机械动力学、机电控制.Email:zkwy2004@126.com
猜你喜欢
铁道建筑技术(2022年10期)2022-10-28
建材发展导向(2022年18期)2022-09-22
兰州交通大学学报(2022年2期)2022-04-26
化工机械(2022年1期)2022-03-21
水道港口(2020年2期)2020-06-08
特种结构(2019年2期)2019-08-19
苏州科技大学学报(工程技术版)(2019年2期)2019-07-19
同济大学学报(自然科学版)(2018年1期)2018-02-08
铁道勘察(2016年3期)2016-08-01
振动与冲击(2014年21期)2014-09-18
