
磁悬浮系统的模糊PID控制器设计
2015-11-17 12:11丁肇红
应用技术学报 2015年1期
耿 涛, 丁肇红
(上海应用技术学院电气与电子工程学院,上海 201418)
磁悬浮系统的模糊PID控制器设计
耿 涛, 丁肇红
(上海应用技术学院电气与电子工程学院,上海 201418)
基于GML1001磁悬浮实验装置设计了一个模糊PID控制器.该控制器利用传统的PID控制器和模糊控制器相结合形成,能根据系统偏差的大小、方向以及变化趋势等特征,依据模糊规则库做出模糊推理,能自动调整PID参数,可达到更加满意的控制效果.利用设计的模糊自适应PID控制器,对磁悬浮控制系统中钢球的悬浮位置实现了精确的控制.实验结果表明,模糊自适应PID控制器可以使磁悬浮控制系统拥有较好的稳态和动态性能.
磁悬浮系统;模糊控制;模糊PID控制器;参数整定
20世纪初,悬浮理论的奠基者们最先在实验室中造成了物体在空间自由悬浮这一人类历史上长期视为神秘的现象.然而真正实现电磁悬浮,并把这一技术加以应用是近几十年的事.磁悬浮系统因无接触的特点而避免了物体之间的摩擦和磨损,能延长设备的使用寿命,改善设备的运行条件,因而在冶金、交通、机械、电器及材料等各方面有着广阔的应用前景.虽然磁悬浮的应用领域繁多,系统形式和结构各不相同,但究其本质都具有非线性、不确定性和开环不稳定性的特性[1].磁悬浮的这些特性增加了其控制的难度,也正因为这些特性,使其更加具有研究价值和意义.
磁悬浮系统是一个绝对不稳定的系统,为使其保持稳定并且可以承受一定的干扰,需要给系统设计控制器.因此,控制器的设计是磁悬浮系统的核心内容.磁悬浮控制系统由于非线性和滞后性的特点,难以为系统建立精确的数学模型.传统的PID控制因得不到精确的数学模型,且动态性能较差,故控制效果并不理想.但是,PID控制的积分功能可以消除静差,使稳态性能变好[2].而普通的模糊控制,其功能类似于比例微分的控制方式,具有良好的动态性能,但存在稳态误差,属于有差调节.因此,本文将传统的PID控制器和模糊控制器相结合形成模糊PID控制器,它能根据系统偏差的大小、方向以及变化趋势等特征,依据模糊规则库做出模糊推理,能自动调整PID参数,可达到更加满意的控制效果.
1 磁悬浮系统的硬件
GML1001型磁悬浮实验装置,适用于自动控制教学实验以及在控制算法等相关领域进行科学研究.磁悬浮球控制系统是研究磁悬浮技术的平台,是一个典型吸浮式悬浮系统.系统结构图如图1所示.

图1 磁悬浮系统结构图Fig.1 The structure of magnetic levitation system
当装置中的电磁铁绕组通过电流时会产生电磁力,若控制流过电磁铁绕组中的电流,使电磁力与钢球的重力相平衡,钢球就可悬浮在空中,从而实现平衡状态.为了使系统平衡,采用闭环控制,使整个系统稳定且具有一定的抗干扰能力.系统采用无接触测量装置,该装置由光源和光电位置传感器组成.它能检测钢球与电磁铁之间的距离x的变化,也可检测距离变化的速率,提高控制的效果.电磁铁中控制电流的大小作为磁悬浮控制对象的输入量.
2 磁悬浮系统的数学模型
为了研究磁悬浮系统的模糊PID控制策略问题,简单地对磁悬浮系统的数学模型进行介绍和推导.磁悬浮系统方程描述为:
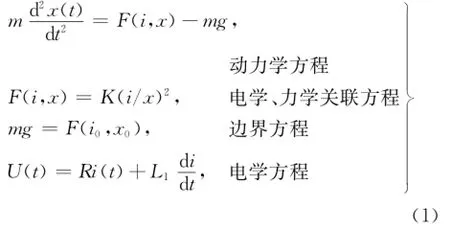
式中:x为小球与电磁铁磁极的气隙;m为小球的质量;i为电磁铁绕组中的瞬时电流;t为时间;g为重力加速度;R为电磁铁绕组的电阻;K为系统电磁力模型中的常数;L1为小球不在电磁场中时的静态电感;U(t)为电磁铁绕组的电压;F(i,x)为电磁吸力;F(i0,x0)为平衡位置时的电磁吸力;i0为电磁铁绕组在平衡位置时中的瞬时电流;x0为平衡位置时,小球与电磁铁磁极的气隙.
因系统具有非线性特点[3],建立模型时,对系统做了简化处理.将电磁铁的控制电流直接作为输入量,不考虑感抗对系统的影响,从感性元件储能的角度加以分析建模,并且假设功率放大器的输出电流与输入电压之间呈严格的线性关系且无延迟.
系统在线性化处理[4]后,该系统控制对象的模型可描述为


根据状态方程,系统在复平面的右半平面有一个闭环极点.根据系统稳定性判据,即系统所有的闭环极点必须位于复平面的左半平面时系统才稳定,所以磁悬浮球系统是本质不稳定的.实际系统的模型参数为
将上述参数代入式(3),可得

由式(4)和(5),uin-y之间的传递函数为

根据线性定常系统状态完全能控能观测的充要条件,已知磁浮列车悬浮系统能控且能观,因此可以对系统进行控制器设计,使系统稳定.
3 磁悬浮系统模糊PID控制器设计
模糊PID控制器系统结构如图2所示,主要由参数可调的PID控制器和模糊控制器构成[5].
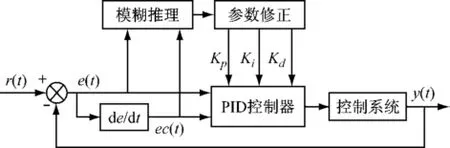
图2 模糊PID控制器结构Fig.2 The structure of fuzzy PID controller
由PID控制器实现对系统的控制,模糊控制系统以误差e和误差变化率ec作为输入,根据模糊规则库,采用模糊推理方法对PID参数ΔKp,ΔKi, ΔKd进行调整,满足不同的误差e和误差变化率ec对PID控制器参数的不同要求,使被控对象具有良好的动态和静态性能.PID参数的调整算法为:

式中,Kp0、Ki0、Kd0为Kp、Ki、Kd的初始设定值,通过普通PID的整定方法得到.参数ΔKp、ΔKi、ΔKd为模糊控制器的3个输出,是PID参数的校正量.
3.1 模糊控制器的输入和输出
磁悬浮系统实验平台控制的目的是使钢球在某一设定高度上悬浮,并保持平衡.因此,模糊控制器选择钢球的位置偏差e和偏差变化率ec作为模糊控制器的输入变量,选择PID参数的修正量ΔKp、ΔKi、ΔKd作为输出变量.输入变量和输出变量的语言变量、基本论域、模糊子集、模糊论域及量化因子如表1所示.选择输入变量和输出变量的隶属度函数为均匀三角形.
3.2 模糊控制规则
根据PID参数作用及在不同偏差e和偏差变化率ec时,对PID参数的要求,总结工程人员的专业知识和实际经验,得出模糊控制器3个输出变量ΔKp、ΔKi、ΔKd的模糊控制规则,如表2~4所示.

表1 模糊PID参数Tab.1 Parameters of fuzzy PID
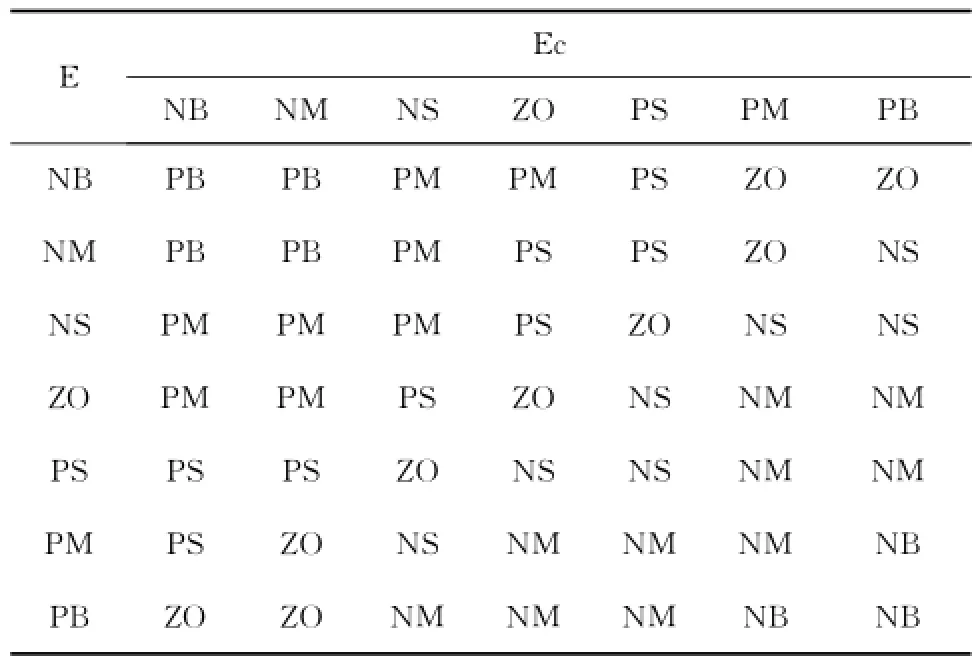
表2 ΔKp的模糊规则表Tab.2 The fuzzy rules table ofΔKp
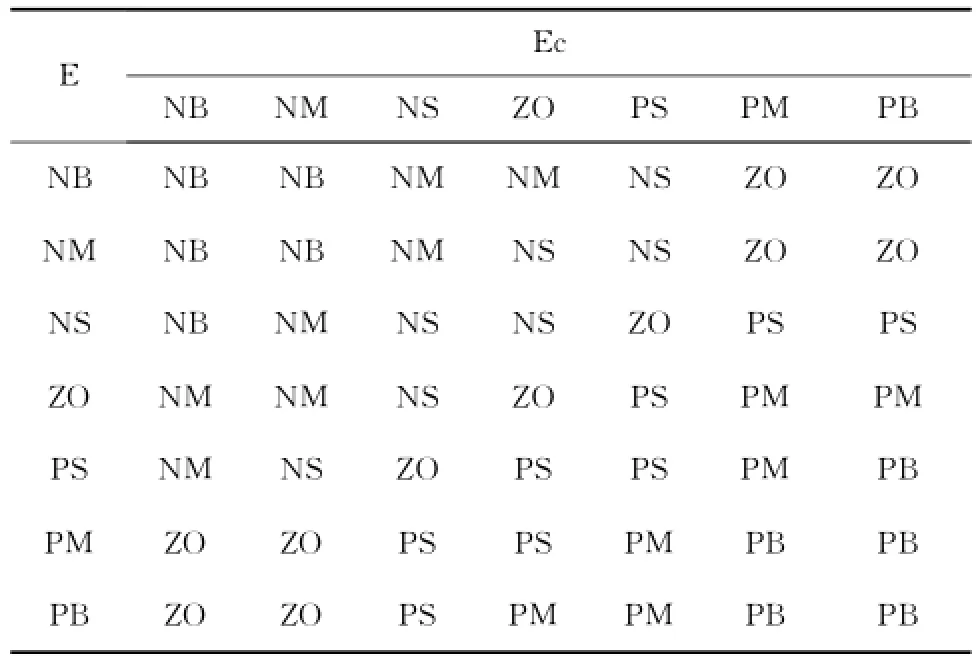
表3 ΔKi的模糊规则表Tab.3 The fuzzy rules table ofΔKi
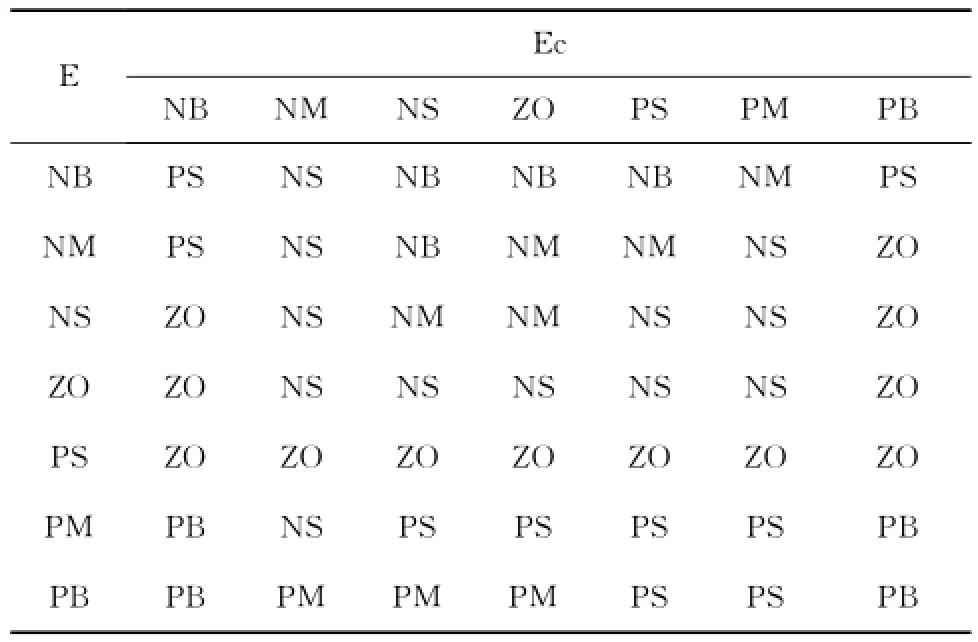
表4 ΔKd的模糊规则表Tab.4 The fuzzy rules table ofΔKd
3.3 解模糊化
模糊控制器有3个输出,解模糊的方法采用重心法,即

式中,Ki表示输出K(K对应3个输出ΔKp、ΔKi、ΔKd)的第i个语言变量;μ(Ki)表示第i条规则所得到的输出Ki的隶属函数值.
3.4 仿真
模糊PID控制器利用MATLAB软件的系统模型图形化仿真工具SIMULINK来完成仿真[6-7].
模糊控制器由SIMULINK中的“Fuzzy Logic Toolbox”完成.模糊控制器的输出控制信号ΔKp、ΔKi、ΔKd与PID的初始设定值相加输入到经典PID控制器,连接成模糊PID控制器,并将其封装.
将模糊PID控制器与被控对象进行连接,设定单位负反馈回路以形成闭环系统[8].经典PID控制器的预置参数Kp=2,Ki=6.7,Kd=0.05设置给“Constant模块”.选择单位阶跃信号为系统输入;磁悬浮系统被控对象为

建立磁悬浮模糊PID控制系统MATLAB仿真如图3所示.
经MATLAB仿真得到的单位阶跃下经典PID和模糊PID控制器作用下的系统输出如图4所示.由图可见,模糊PID控制器的超调量比经典PID控制器小得多,改善了系统的稳定性.
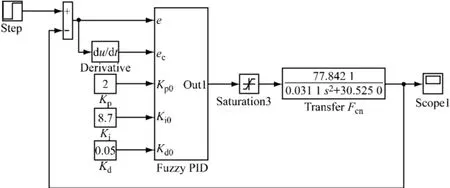
图3 磁悬浮模糊PID控制系统仿真框图Fig.3 Simulation bloclc diagram of magnetic levitation fuzzy PID control system

图4 PID控制器和模糊PID控制器的系统输出Fig.4 System output of PID controller and fuzzy PID controller
4 磁悬浮系统的实时控制
进入SIMULINK实时控制工具箱“Googol Education products”,利用其中实时控制模块“Real Control”重新搭建实时控制[9]系统,如图5所示.

图5 磁悬浮模糊PID控制的实时控制Fig.5 Real-time control of Magnetic Levitation Fuzzy PID
系统搭建后,修改PID控制器的预置参数Kp=2,Ki=6.7,Kd=0.02.输入电压给定并编译程序,之后将程序与外部磁悬浮系统装置连接,并运行程序.将小球置于电磁铁附近,可发现电磁铁有一定的吸引力.将小球用手置于电磁铁下方预想悬浮的位置,程序进入自动控制时,缓慢松开手,小球能顺利悬浮.此时传感器处理电路输出电压如图6所示.

图6 传感器处理电路输出电压Fig.6 The output voltage of the sensor processing circuit
根据硅光电池的感光面积按给定规律发生改变时的电压信号输出规律,磁悬浮装置已标定好该传感器的线性度以及线性范围.若x表示小球上定点与电磁铁极端面之间的气隙(mm)(电磁铁极端面为零点,小球向下运动时,x为正方向),y表示输出电压信号(V),则存在关系y=-458.715 6x.若要将小球的悬浮高度控制在8 mm,则给定电压设为-3.67 V.运行程序,观察小球悬浮位置.磁悬浮系统小球悬浮位置如图7所示.

图7 磁悬浮系统小球悬浮位置Fig.7 The suspension position of the ball in magnetic levitation system
由图可知,磁悬浮系统小球悬浮位置能准确控制在8 mm.从用手放置小球至电磁铁下方预设悬浮的位置,到小球能顺利浮起,共计用时1.5 s;稳定时的最大误差为±1 mm.实时结果表明,磁悬浮控制系统,作为典型的非线性迟滞系统,通过模糊PID控制器作用,基本能实现无静差、超调量小且响应速度较快的性能指标要求.模糊PID控制器使磁悬浮有较好的稳态和动态性能.
5 结 语
本文针对磁悬浮控制系统非线性、不确定性、开环不稳定性的特性,设计了模糊PID控制器.该控制器既利用模糊控制不需要获得系统的精确数学模型的特点,又利用了PID控制的积分功能可以消除稳态误差的优点,将两种方法相结合,获得了良好的动态和稳态性能.实时运行结果表明,模糊PID控制器能实现无静差、超调量小且响应速度较快的性能要求.本文设计的磁悬浮模糊PID控制器优越于PID控制器,获得了良好的控制效果.
[1] 毛保华,黄荣,贾顺平.磁悬浮技术在中国的应用前景分析[J].交通运输系统工程与信息,2008,8(1):29-39.
[2] Liu Desheng,Li Jie,Zhang Kun.Design of nonlinear decoupling controller for double-electromagnet suspension system[J].自动化学报,2006,32(9):321-328.
[3] 曹建福,韩崇昭,方洋旺.非线性系统理论及应用[M].西安:西安交通大学出版社,2001.
[4] 龙鑫林,佘龙华,常文森.电磁永磁混合型EMS磁悬浮非线性控制算法研究[J].铁道学报,2011,33(9):36-39.
[5] 王永富,柴天佑.自适应模糊控制理论的研究综述[J].控制工程,2006,13(3):193-198.
[6] 李博,龚晓宏.基于MATLAB的模糊控制系统的优化设计与仿真[J].电子元器件应用,2005,7(3):54-57.
[7] 曲萍萍,魏绍义.磁悬浮系统的模糊控制仿真研究[J].沈阳航空工业学院报,2007,24(4):45-48.
[8] 朱顺利,吴莉,李明.基于模糊控制的磁悬浮系统及其仿真[J].兵工自动化,2007,26(10):24-26.
[9] 彭辉,徐锦华,侯海良.模糊控制在磁悬浮球系统实时控制中的应用[J].控制工程,2009,16(3):278-281.
(编辑 俞红卫)
A Fuzzy PlD Controller Design for Magnetic Levitation System
GENG Tao, DING Zhao-hong
(School of Electrical and Electronic Engineering,Shanghai Institute of Technology,Shanghai 201418,China)
Based on the GML1001 magnetic levitation experiment device,a fuzzy PID controller was designed.It was created by taking advantage of the superiority of traditional PID controller and fuzzy Controller,and could make fuzzy inference on the basis of fuzzy rule base and automatically adjust parameters of PID on the basis of the size of the system deviation,direction,and change trend,so as to achieve the purpose of more satisfactory control effect.The precise control of the steel ball’s suspension position in the magnetic levitation control system was accomplished with the designed fuzzy adaptive PID Controller.Research results showed that magnetic levitation control system displayed good steady state and dynamic characteristics with the fuzzy adaptive PID controller.
magnetic levitation system;fuzzy control;fuzzy PID controller;parameters tuning
TP 273.4
A
1671-7333(2015)01-0086-05
10.3969/j.issn.1671-7333.2015.01.015
2014-05-09
上海市教委科研创新基金资助项目(12YZ159);企业委托资助项目(J2013-03)
耿 涛(1991-),男,硕士生,主要研究方向为信息处理及智能控制.E-mail:1315577938@qq.com
丁肇红(1966-),女,副教授,主要研究方向为系统辨识、非线性控制和智能控制.E-mail:dzh@sit.edu.cn
猜你喜欢
小猕猴智力画刊(2022年10期)2022-11-02
小猕猴智力画刊(2022年4期)2022-05-23
科学技术创新(2021年22期)2021-08-16
小学科学(学生版)(2021年4期)2021-07-23
防爆电机(2021年2期)2021-06-09
时代农机(2019年5期)2019-08-17
军事文摘(2017年16期)2018-01-19
中国科技教育(2016年12期)2017-08-11
中国新技术新产品(2017年1期)2017-01-20
科学与财富(2016年28期)2016-10-14
