智能小车控制
2015-10-21 12:07:51高永胜
中学课程辅导·教师教育(中) 2015年1期
关键词:智能小车
高永胜
【摘要】 智能作为现代的新发明,是以后的发展方向,它可以按照预先设定的模式在一个环境里自动的运作,不需要人为的管理,可应用于科学勘探等用途。我们通过软件编程实现它的行进、停止的精确控制,并再次寻找到原来的轨道。
【关键词】 智能小车 自动运作 寻找轨道
【中图分类号】 G712 【文献标识码】 A 【文章编号】 1992-7711(2015)01-076-02
0
一、功能说明
基本功能:小车能够在设计的线路上完成寻迹功能
二、方案论证
以AT89S51单片机为核心的控制电路,采用模块化的设计方案,运用传感器检测电路,实现小车在行驶中自动寻迹。并将循迹过程中等数据传至单片机进行处理,然后由单片机根据所检测数据实现对电动小车的智能化控制。
三、各模块设计
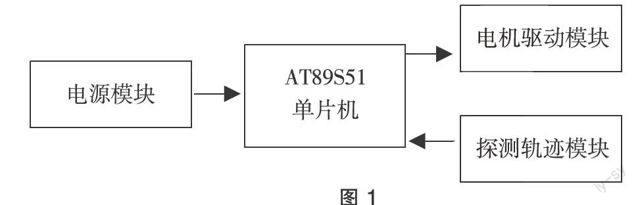
电路分为电源模块、单片机系统模块、电机驱动板、寻迹模块。
智能小车运行基本原理框图见图1。
图1
1. 电源模块
采用6节1.2V干电池供电,电压达到7V左右给直流电机供电,然后用7805降压、稳压后给单片机系统供电。
2. 单片机系统模块
本系统采用AT89S51单片机作为中央处理器。其主要任务是在小车行走过程中不断读取传感器采集到的数据,将得到的数据进行处理后,来控制小车行走,同时将相关数据送显示单元动态显示。
单片机是把中央处理器CPU、随机存储器RAM、只读存储器ROM、I/O接口电路、定时/计数器以及输入输出适配器都集成在一块芯片上,构成一个完整的微型计算机。它的优点是体积小,可放在仪表内部,且单片机内部有可以多次重复编程的闪烁ROM,并且闪烁ROM可以直接用编程器来擦写,使用起来比较方便。
在本系统中,AT89S51单片机的P0口用于数码显示,P2.4 P2.5 P2.6 P2.7口用于电动机的PWM驱动控制,P1.0 P1.1 P1.2口用于探测轨迹,P2.1 P2.2 P2.3用于LED提示,P2.0用于倒车显示和蜂鸣器报警。
3. 探测轨迹模块
为了保证小车沿黑线行驶,采用了两个检测器并行排列,左右方向都可以进行控制,控制精度得以提高。在小车行走过程中,结合查询方式,通过程序控制小车行走轨迹。如果左方向偏离黑线,则右侧的探头就会检测到黑线,把信号传送到单片机,进行处理校正。控制其向右转;如果右方向偏离黑线,则左侧的探头就会检测到黑线,把信号传送到单片机,进行处理校正。控制其向左转。从而保证小车沿黑线行驶。采用TK-20黑白线检测传感器在本设计中,要求电动小车沿着路面的黑色轨道行驶。其探测路面黑线的基本原理:光线照射到路面并反射,由于黑线和白纸对光的反射系数不同,可以根据接收到的反射光强弱来判断是否是黑线。利用这个原理,可以控制电动小车行走的路迹。
根据黑色和白色路面对光的反射程度不同,白色反射程度强,而黑色反射程度弱。我们采用TK-20黑白线检测传感器,其有效探测距离达5cm。通过调节电位器,最远可以达到10cm,受可见光干扰小,输出信号为开关量,信号处理简单,使用非常方便。
使用注意事项:
(1)该传感器为开关量传感器,输出为TTL电平,可以直接和单片机连接,但需要在输出端加上拉电阻(如不加上拉电阻会出现不规则电平输出)。
(2)一定不要把线接错,否则容易烧掉传感器。
4.电动机驱动模块
为了电路设计简单,采用电机专用驱动芯片L298,其驱动电流大,瞬时电流最高可达2A,为电机驱动专门设计,工作稳定可靠。
L298是SGS公司的产品,比较常见的是15脚Multiwatt封装的L298,内部同样包含4通道逻辑驱动电路。可以方便的驱动两个直流电机,或一个两相步进电机。
本实验装置我们选用驱动一台电动机。5,7,10,12脚接输入控制电平,控制电机的正反转。EnA,EnB接控制使能端,控制电机的停转。
根据直流电机稳态运行方程式:
U=CeФN+RaIa
其中:Ф为电机每极磁通量;Ce为电动势常数;
N为电机转数;Ia为电枢电流;Ra电枢回路电阻。
电机转数N为0,电机的电流急剧增加,时间过长将会使电机烧坏。但电机起动时,电机中线圈中的电流也急剧变大,因此我们必须把这两种状态分开。长延时电路可把这两种状态区分出来。长延时电路工作原理:当Rs1过流U5A产生一个负脉冲经过微分后,脉冲触发555的2脚,电路置位,3脚输出高电平,由于放电端7脚开路,C1,R5及U6A组成积分器开始积分,电容C1上的充电电压线性上升,延时运放积分常数为100R5C1。當C1上充电电压,即6脚电压超过2/3VCC,555电路复位,输出低电平。电机启动时间一般小于0.8s,C1充电时间一般为0.8~1s。U5A输出电平与555的3脚输出电平经U7相或,如果U5A输出低电平大于C1充电时间,U7在C1充电后输出低电平由与门U8输入到L298的6脚ENA端使电机停止。如果U5A的输出电平小于C1充电时间,6脚不动作电机的正常启动。长延时电路吸收电机启动过流电压波形,从而使电机正常启动。
单片机系统需要接收路径识别电路的信号,采用某种路径搜索算法进行寻线判断,进而控制舵机和直流驱动电机的工作。小车系统的硬件部分读者可以自行利用Proteus仿真。也可自行购买实物焊接制作。软件部分读者可以参考类似单片机案例自行采用C语言并利用Keil编程软件实现。
总结
在硬件设计中,开始一个模块设计之前和完成一个模块设计之后都要进行测试。在动手之前务必查清楚所用元件资料,在稍微复杂一点的电路设计之前可以先搭建其中的一部分电路,测试一下是否正常,然后再进行总的电路设计。这样循序渐进的进行设计可以节省时间保证电路的正确性。因此硬件设计完成之后首先需要测试硬件能够正常工作,这样在遇到问题时才能够排除硬件的干扰找出问题的所在。不足之处在于本例还是停留在仿真阶段,具体实物制作与软件编程没有编入其中。读者可以据提供的思路自行改进!
[ 参 考 文 献 ]
[1]郭天祥.51单片机C语言教程.[M]电子工业出版社.2009.
[2]周志德.单片机原理与应用.[M]高等教育出版社.2001.
猜你喜欢
商情(2016年46期)2017-03-06 04:24:19
科学与财富(2016年32期)2017-03-04 19:37:47
大陆桥视野·下(2016年11期)2017-02-28 20:39:44
中国新技术新产品(2017年2期)2017-01-20 18:09:43
电子技术与软件工程(2016年22期)2016-12-26 13:02:32
科技创新与应用(2016年34期)2016-12-23 10:14:38
科教导刊(2016年27期)2016-11-15 22:32:51
电子技术与软件工程(2016年18期)2016-11-14 02:16:38
电脑知识与技术(2016年17期)2016-07-23 20:28:22
电脑知识与技术(2016年9期)2016-05-18 14:08:30