
基于ARM+DSP的汽车防追尾控制系统的研究
2015-10-13 21:52汪磊,周力,孙浩
井冈山大学学报(自然科学版) 2015年1期
汪 磊,周 力,孙 浩
基于ARM+DSP的汽车防追尾控制系统的研究
*汪 磊,周 力,孙 浩
(安徽工程大学安徽省电气传动与控制重点实验室,安徽,芜湖 241000)
针对汽车追尾事故所带来的严重危害,本文运用现代传感技术、激光测距雷达等技术设计了以ARM为控制核心、DSP为数据处理核心的双处理器架构的汽车防追尾控制系统。介绍了系统的工作原理、设计了整个硬件结构,并在此基础上对两车间的安全距离算法以及模糊算法进行了研究。最后,通过Matlab的仿真,结果表明该系统在防止汽车追尾的问题上切实有效。
ARM;DSP;激光测距雷达;模糊算法;汽车防追尾
随着汽车工业的迅速发展,交通事故成为严重的社会问题。预计至2020年,交通事故将成为造成人类非正常死亡的最大的直接原因之一[1]。一项研究分析表明:80%以上的交通事故是由驾驶员反应不及时导致的, 若驾驶员能够提前1 s进行预防, 则可避免 90%的事故发生[2]。因此,汽车防追尾控制系统的研究显得尤为重要。目前,国内外很多公司和机构进行了这方面的研究,且都取得了一些成果。其中,以德国、美国、日本等为代表的一些发达国家在该技术上已经处于世界领先水平。相对于国外很多研发机构,我国对汽车防追尾控制系统的研究仍然处于实验阶段[2]。
现有的汽车防追尾系统采用的是单一的处理器,而该系统对图像处理以及数据处理速度要求较高,单一的处理器将会降低系统的实时性。此外,当车处于弯道时,经常会将道路两边的树木、护栏等当成是前车车辆进行处理,从而发生不必要的虚警情况。针对这些问题,本文提出了DSP+ARM双处理器架构的汽车防追尾控制系统。该系统利用DSP对照片进行图像处理与模式识别[4],判断前方障碍物是否是车辆。然后,通过ARM控制执行模块,使汽车减速并报警。仿真的结果证明了系统在防止汽车追尾的问题上的可行性,在改善汽车防追尾的问题上有一定的应用价值。
1 系统的工作原理
系统的总体设计方案如图1所示。将摄像机安装在汽车挡风玻璃中心,用来对前方汽车的尾部进行拍摄。将拍到的照片通过CCD图像传感器由光信号转变为电信号加至DSP中,建立汽车方位的数学模型。然后将此数学模型做图像处理与模式识别,以判断前方障碍物是不是车辆。将激光测距雷达安装在汽车前部格栅中心,光学天线发射的激光束遇到前面的障碍物后,产生向后散射信号,同样被光学天线接收,并调制出距离和方位信息。当确认前方是车时,激光测距雷达开始工作。通过ARM计算出它相对本车的速度及车间的实际距离,当实际距离小于安全距离时,系统开始报警,并通过模糊控制原理进行分级减速,从而防止追尾事故的发生。

图1 汽车防追尾系统总体设计
2 系统的硬件设计
该系统主要由信号采集模块、中央处理模块、执行模块三个部分组成。其硬件结构图如图2所示。
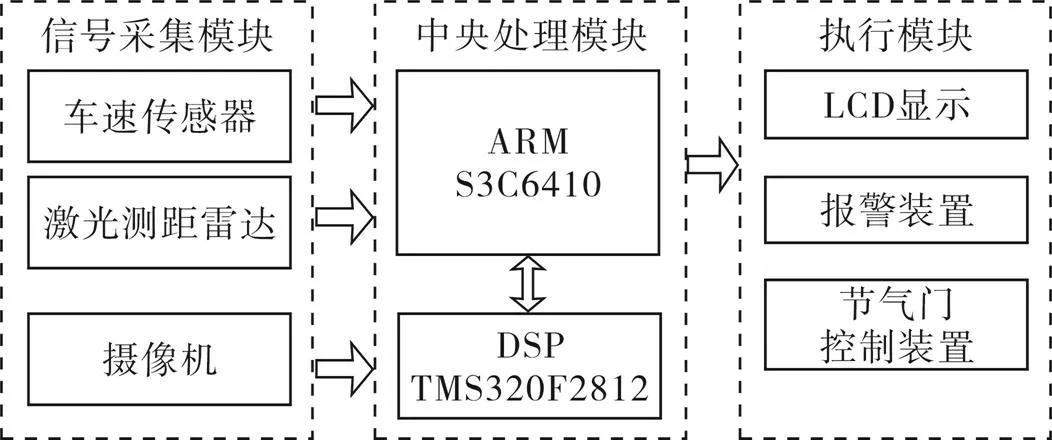
图2 汽车防追尾控制系统的硬件结构图
2.1 中央处理模块
该模块选用TMS320F2812作为数据处理芯片,TMS320F2812是TI公司推出的基于C2000平台上的32位DSP芯片。由于本文首先通过CCD对前方汽车的尾部进行拍摄,再对照片进行处理,建立一个汽车方位的数学模型。然后,将此数学模型做图像处理与模式识别,以判断前方障碍物是不是车辆。这样就可以在很大程度上减少系统虚警的情况。因此,就需要对采集到的图像进行处理,且数据量很大。考虑到DSP在这一方面突出的优点,所以本文选用型号为2812的DSP来完成这些工作。此外,选用S3C6410作为主控制芯片,SS3C6410是基于SAMSUNG的16/32位RSIC微处理器S3C6410X的一款开发平台,S3C6410X是基于ARM1176JZF-S核的用于手持、移动等终端设备的通用处理器。当前方是车辆时,计算出两车的实际距离和相对速度,当两车的实际距离小于安全距离时,根据模糊控制原理,向执行模块发送控制命令,从而使汽车分级减速并报警。
2.2 信息采集模块
该模块由激光测距雷达、车速传感器、摄像机组成。目前,测量两车间距离主要有四种方法:超声波测距、毫米波雷达测距、视觉测距和激光测距[5]。考虑到激光测距雷达具有测量周期短、距离远、误差小、分辨力高、价格适中等特点,故本文选用激光测距雷达用来测量两车间的距离;车速传感器选用最常用的磁阻式车速传感器,用来测量本车的速度;摄像机对前方汽车尾部进行拍摄,通过DSP进行图像处理与模式识别,判断前方是否是车辆,从而减小虚警情况。
2.3 控制执行模块
该模块包括:节气门控制装置、LCD显示装置、报警装置。节气门控制装置用来控制节气门的开度,从而达到控制车速的目的;LCD显示装置用来显示两车的实际距离已经相对速度;报警装置接受ARM发送的控制信号,根据不同的情况,鸣响的时间也不同[6]。
3 系统软件设计
3.1 系统的总体流程图
首先,通过摄像机对前方进行拍照,然后通过DSP对图像进行处理和模式识别,判断前方是汽车还是障碍物[7]。当确认是车辆时,利用激光测距雷达测得前车与本车之间的实际距离。最后,当实际距离小于安全距离时,系统开始报警并减速。系统的总体流程图如图3所示。

图3 主流程图
3.2 两车间安全距离的算法
由于车辆安全距离的数学模型是实现防追尾控制系统的基础。所以,建立一个合适的汽车防追尾安全距离模型有着重要的意义[8]。使汽车不发生追尾的条件是[9]:

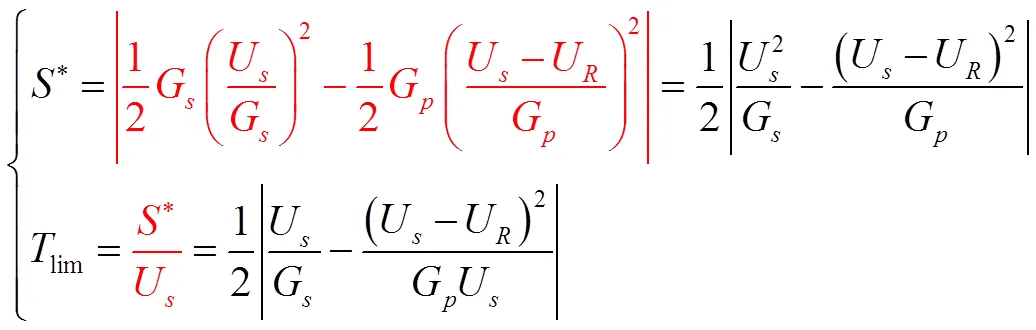
式中:U表示本车速度;U表示两车的相对速度;G表示前车减速度;G表示本车标准减速度。
激光雷达的测距、测速公式如下:

3.3 模糊算法的设计
将激光测距雷达测得的两车之间的实际距离以及相对速度(其中:代表前车的速度,代表本车的速度)作为输入量,制动力度作为输出量[10-11]。当两车的实际距离小于安全距离时,通过模糊算法使汽车分级减速,具体的模糊算法设计如下:
首先,分别对实际距离、相对速度和制动力度进行模糊化处理[12]:定义“实际距离R”的模糊词集为:很近 (VC),较近(C),一般(M),较远(F),很远(VF);定义“相对速度V”的模糊词集为:正大(PB),正小(PS),零(ZE),负小(NS),负大(NB);定义“制动力度U”的模糊词集为:零(ZE),较小(S),适中(M),大(B),很大(VB)。
然后,根据两车实际距离越近,制动力度越大;以及相对速度越小,制动力度也应越大的原则,制定出具体的模糊控制规则,如表1所示。

表1 模糊控制规则表
4 仿真及分析
本文采用Matlab对控制过程进行仿真,得出系统的控制过程曲面图,如图4所示。从图中输入轴R(实际距离)可以看出,本车与前车在100 m范围内开始制动,随着相对距离越来越近,输出轴(制动力度)也越来越大。同样,根据图中输入轴(相对速度)可以看出,当为正时且相对距离很远汽车正常行驶;当为负时,相对速度越大,输出轴(制动力度)也越来越大。

图4 系统的控制过程曲面图
5 结论
本文在安全距离数学模型的基础上,提出了ARM+DSP的汽车防追尾控制系统。该系统利用DSP进行图像处理与模式识别,判断前方障碍物是否是车辆,并通过激光测距雷达测得两车之间的实际距离。然后,利用ARM控制执行模块,根据模糊控制原理使汽车减速并报警。最后,通过Matlab的仿真结果,证实了系统的可行性,在防止汽车追尾的问题上切实有效,具有重要的的应用前景。
参考文献:
[1] 姬永兴.中国道路交通事故现状及发展趋势 [EB/OL]. http://www.chinasafety.gov.cn/file/2003-12/26/zyaq/zazhi/ zyaq2004-1-2.htm.
[2] 黄艳国,肖定华,许伦辉.基于DSP 的毫米波汽车防撞雷达系统[J].微计算机信息,2008,24(9-2):111-112,223.
[3] 韩峻峰,张惠敏,潘盛辉,等.汽车防撞雷达概述[J].广西工学院学报,2011,22(4):54-58.
[4] 刘岩俊.嵌入式DSP图像处理系统设计与实现[J].国外电子测量技术,2013,32(9):11-14.
[5] 廖平,丁睿明,吴雨欣.汽车防碰撞系统中测距模块的设计[J].微计算机信息,2012,28(9):113-115.
[6] Nai Tian Gan, Ling Shan Chen. Research on Fuzzy Control Rule of Anti-Vehicle Rear-End Collision by Matlab and Simulink[J]. Advanced Materials Research, 2011,308-310:2247-2249.
[7] 张学军,张岳锋.基于毫米波雷达的汽车防撞模糊控制研究[J].兰州交通大学学报,2008,27(1):103-106.
[8] 孙浩,周力,邱意敏.汽车智能防追尾控制系统设计[J].西华大学学报:自然科学版,2013,32(6):68-72.
[9] 林宋,郭瑜茹.光机电一体化技术应用100例 [M]. 2版.北京:机械工业出版社,2010: 241-242.
[10] 王雷,康与云.基于ARM的新型空间三维输入装置设计[J].井冈山大学学报:自然科学版,2012,33(5):67-70.
[11] 黄丽华,胡古月,高越,等.汽车防追尾智能系统研究[J].科技风,2013(14):6-6.
[12] 郭海如,李志敏,徐翠琴,等.基于模糊网络的防车追尾控制器[J].计算机仿真,2013,30(4):159-162,199.
DESIGN OF AUTOMOBILE ANTI-REAR-END COLLISION CONTROL SYSTEM BASED ON ARM AND DSP
*WANG Lei, ZHOU Li, SUN Hao
(Anhui Key Laboratory of Electric Drive and Control, Anhui Polytechnic University, Wuhu, Anhui 241000, China)
In view of the serious damage brought by rear-end collision, we adopt ARM as control core, DSP as data processing core and design the automobile anti-rear-end collision control system with dual processor architecture by applying modern sensor technology and laser ranging radar technology. We introduced the principle of the system and designed the hardware structure. Furthermore, the safe distance algorithm between two cars and fuzzy algorithm are studied. Finally, the simulation results through Matlab show that the system is practical and effective in preventing rear-end collision.
ARM; DSP; laser ranging radar; fuzzy algorithm; automobile anti-rear-end collision
1674-8085(2015)01-0077-04
TP273+.4
A
10.3969/j.issn.1674-8085.2015.01.015
2014-05-19;修改日期:2014-09-25
安徽省教育厅自然科学基金项目(KJ2008A010)
*汪 磊(1989-),男,安徽铜陵人,硕士生,主要从事自动控制、人工智能控制研究(E-mail:765442256@qq.com);
周 力(1957-),男,安徽芜湖人,教授,硕士,主要从事自动控制、人工智能控制研究(E-mail:zhouli5761@sina.com);
孙 浩(1989-),男,江苏淮安人,硕士生,主要从事自动控制、人工智能控制研究(E-mail:272465135@qq.com).
猜你喜欢
科学技术与工程(2022年30期)2022-12-05
机械设计与制造(2022年5期)2022-05-19
汽车电器(2021年12期)2021-12-30
大众汽车(2018年11期)2018-12-26
测控技术(2018年6期)2018-11-25
通信电源技术(2018年5期)2018-08-23
制导与引信(2017年3期)2017-11-02
西南交通大学学报(2016年3期)2016-06-15
电子制作(2016年21期)2016-05-17
通信电源技术(2016年5期)2016-03-22
