
基于复合制动的电动汽车制动能量回收系统设计
2015-10-13 14:26彭闪闪赵雪松时培成
井冈山大学学报(自然科学版) 2015年4期
彭闪闪,赵雪松,时培成
基于复合制动的电动汽车制动能量回收系统设计
*彭闪闪,赵雪松,时培成
(安徽工程大学机械与汽车工程学院,安徽,芜湖241000)
以某国产品牌纯电动汽车为研究对象,以回收和利用汽车的制动能量为研究目标,综合考虑汽车制动动力学特性、电机发电特性和电池充电特性等多方面因素,对其制动能量回收及控制策略进行探讨和研究;提出了一种机械和电机复合制动的能量回收方案;并基于Simulink软件进行了详细的仿真分析,获得了一个较为理想的能量回收率,为进一步开发设计具体的制动能量回收系统控制器奠定了良好的基础。
电动汽车;制动能量回收;仿真
在电动汽车技术的研究和发展中,如何更有效地实现制动能量的回收是迫切需要解决的问题。在制动过程中大量动能会转化为热能耗散掉[1-3],若将这些能量加以回收利用,必然将提高其能量利用率,延长续驶里程。
文献[4]基于并联液压混合动力公交车,建立了动态规划算法的制动能量回收系统,理论上使蓄能器的制动能量回收效率达到60%。文献[5]在电动汽车传统液压制动系统基础上增设液压控制单元和踏板位移传感器,采用硬件在环的方式对系统的控制效果和制动能量回收效率进行了仿真测试,能量回收效率达到59.15%。文献[6]提出定压源飞轮液压再生制动系统,相对于常规电动汽车,续驶里程提高了25%左右。本文以某国产品牌纯电动汽车为研究对象,提出了一种机械和电机复合制动的能量回收方案,并对其进行仿真分析。
1 制动能量传递过程
在行车制动过程中,电机制动所产生的阻力矩经变速器、传动轴、主减速器、后桥传递到车轮[7-8],制动能量的回收过程如图1所示:汽车的动能以机械能的形式经驱动车轮传递到电机,然后在经过电机把机械能转化为电能存储到蓄电池中。在实际行车制动过程中,仅靠电机制动很难实现整车制动,所以本文提出一种机械和电机复合制动的能量回收方案。

图1 电制动过程能量传递系统示意图
2 复合制动系统动力学分析
本文提出的复合制动系统是一种机械与电机相结合制动的方案,此方案在汽车制动过程中摒弃了传统制动方式的不足,实现了能量的回收利用。
根据《汽车理论》知识,汽车的行驶方程式为:
制动过程中,制动力F相当于加速阻力。在城市工况下,忽略空气阻力和坡度阻力的影响。所以汽车的行驶方程可简化为:
目标电动汽车行驶过程中总制动力包括机械制动系统提供的摩擦制动力和电机提供的反拖动制动力两部分。则:

在此分析以下两种情况时,该复合制动系统中机械制动力与电机制动力的分配差异性:
由此可以得出制动方程及推导如下:
电动汽车的负载功率P为
根据能量守恒有:
汽车的瞬时速度a为:

充电电流为:
综上所述,假设1)成立时,则制动过程中所回收的能量为:

2)假设电机所提供的最大制动力不能满足目标车辆的需求制动力,此时,则制动力为:


则:
当假设2)成立时,该转速下电机制动系统发出最大制动力。复合制动力主要由机械制动系统决定,制动时间的长短决定了电动汽车制动回收能量的多少。
3 制动能量回收系统设计
为了满足汽车的制动安全性以及能量回收的最大化,开发了一种新的复合制动能量回收系统,其结构如图2所示。该制动能量回收系统是在不改变原有机械制动系统制动力的情况下,由整车电动机(也作驱动电机使用)提供制动扭矩作用于前驱动轮上,在不影响制动过程的前提下完成制动能量的回收。
为了保证整车行驶安全性,向前轮施加额外制动扭矩后,在能量回收开始前,对整车的行驶状态予以判定。判定时,整车上ABS的工作状态、电机转速、高压动力电池状态、驱动电机状态以及随时出现的故障状态等都需综合考虑,然后再进入到复合制动功能状态中。
在制动过程中,通过计算制动踏板的行程来计算电机制动扭矩。首先,驾驶员的制动意图能通过能量回收系统判断制动踏板的活动幅度、速度以及加速度来确定;然后,按照车速、行驶工况以及制动力需求,来分配前、后轮制动力所占的比例;最后,由电机的扭矩特性确定电机制动力的范围,从而确定电机制动力和摩擦制动力之间各占的比例与大小。车辆制动力满足要求并且车轮不抱死时,使作用于驱动车轮上的制动力尽可能多。
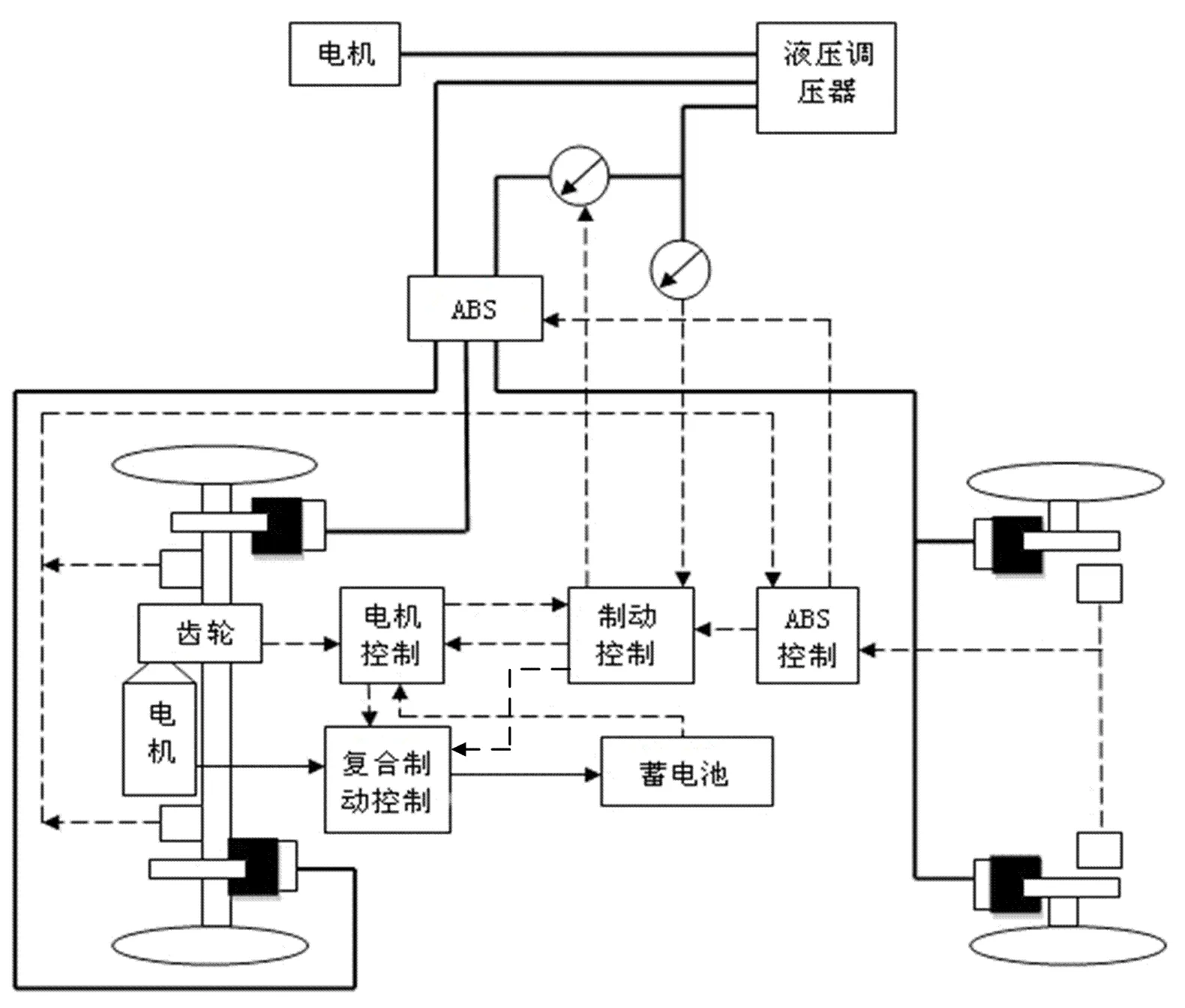
图2 制动能量回收系统结构图
4 仿真分析
4.1 制动控制策略的仿真模型建立
根据两种复合制动力的分配关系,建立该制动能量回收系统基于simulink的仿真模型。
(1)当电机制动系统提供的制动力满足车辆总需求制动力,机械制动力为零,此时制动力是由控制电机电枢电流的值来决定的。用制动踏板的开度值控制制动力,需求制动力与实际制动力的差值使用PID控制器控制。
(2)当电机制动和机械制动共同作用时。电机电枢电流达到最大值,通过控制机械制动系统来控制制动力的大小。
纯电动汽车制动能量回收系统的仿真模型如图3所示,仿真模型参数见表1:
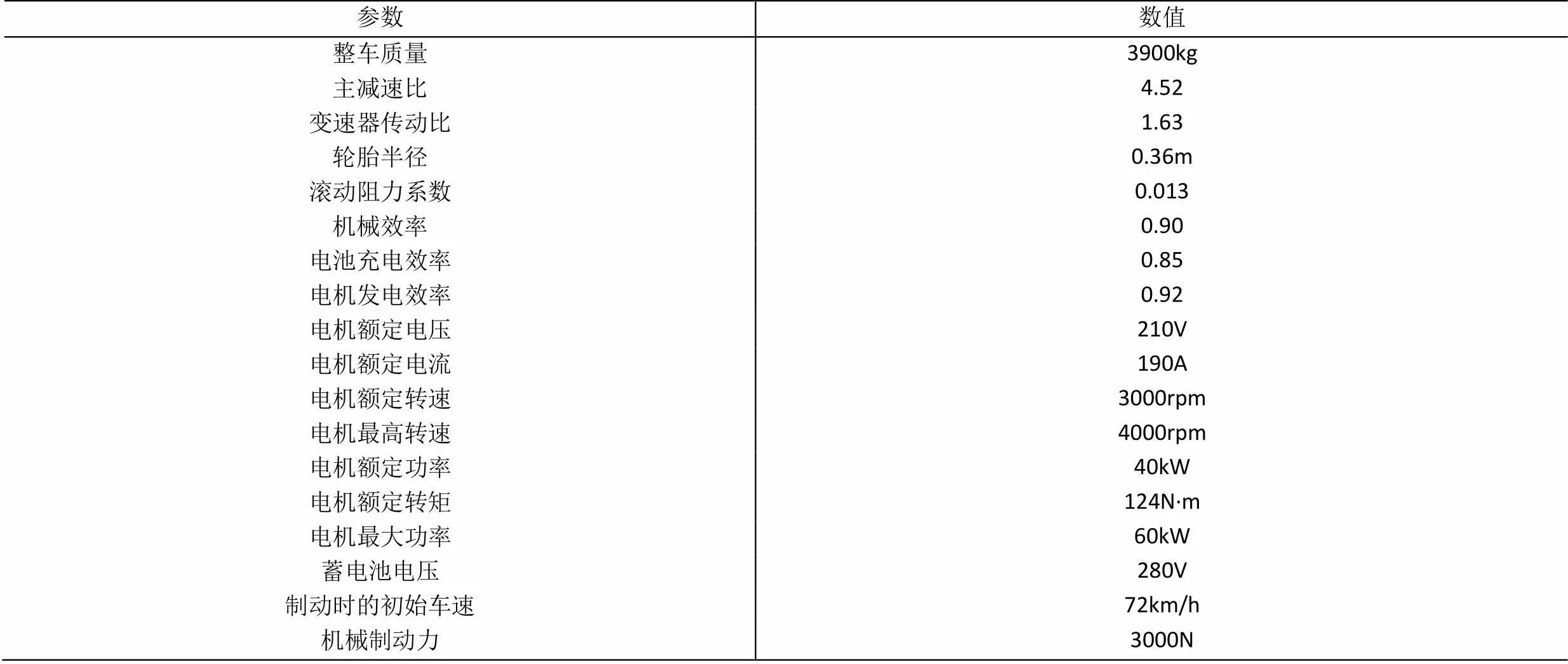
表1 模型参数
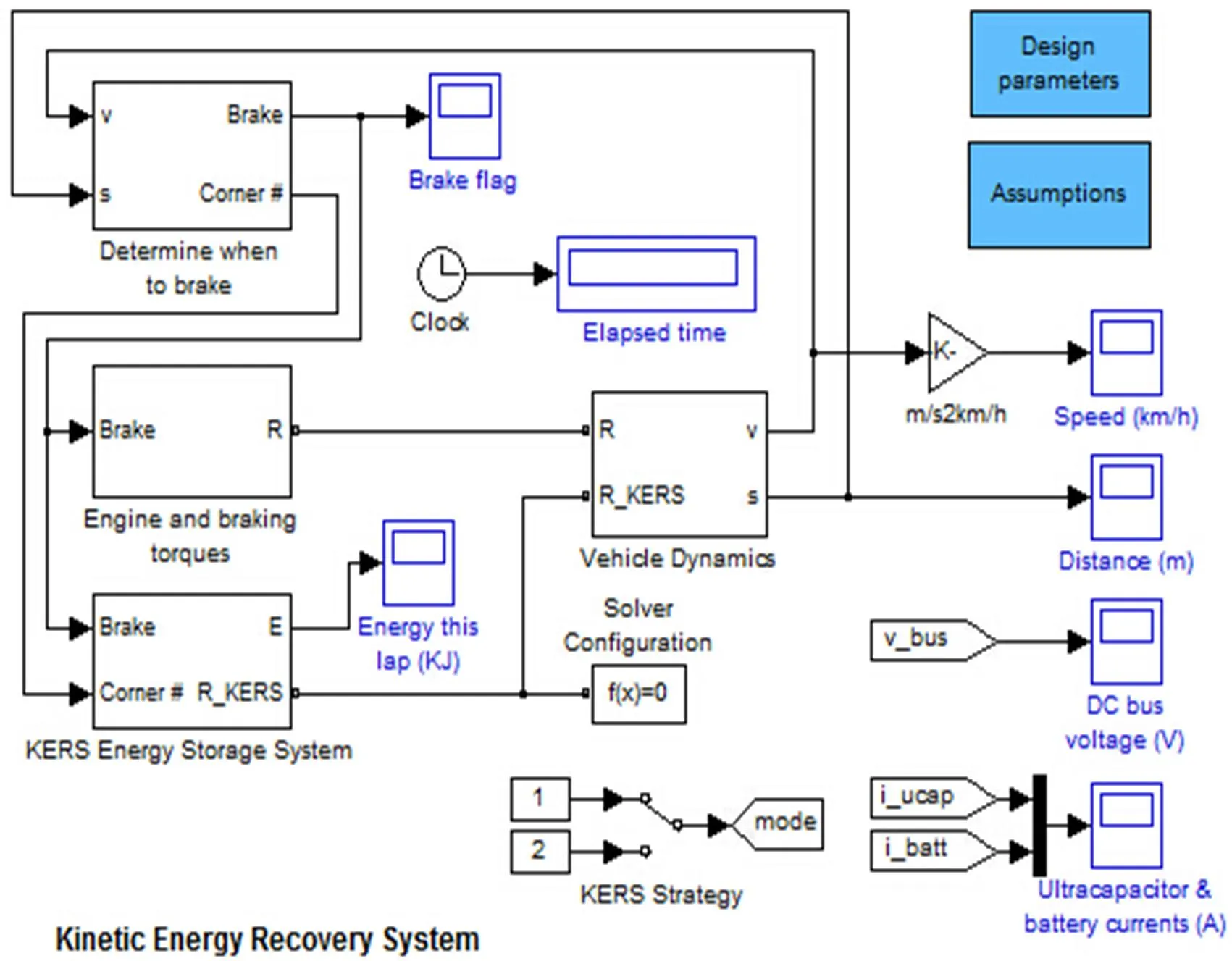
图3 制动能量回收的仿真模型
本系统一共包括了四大块,分别为下行踏板速度判断模块,制动力矩判断模块,kers式制动能回收模块和汽车动力学性能计算模块。
4.2 仿真
时间设置为100 s,对选用汽车进行仿真。
如图4、图5所示,在汽车速度明显减小的20 s左右的区间,电压值明显增大,可以得出这个点系统有明显增强的动能回收现象。
如图5、图6所示,在20 s附近,电压值持续上升,但电流值却有从正值到负值,再从负值到正值的过程,由此可以看出这是回收系统中伺服电机由正转到反转的一个充电过程。
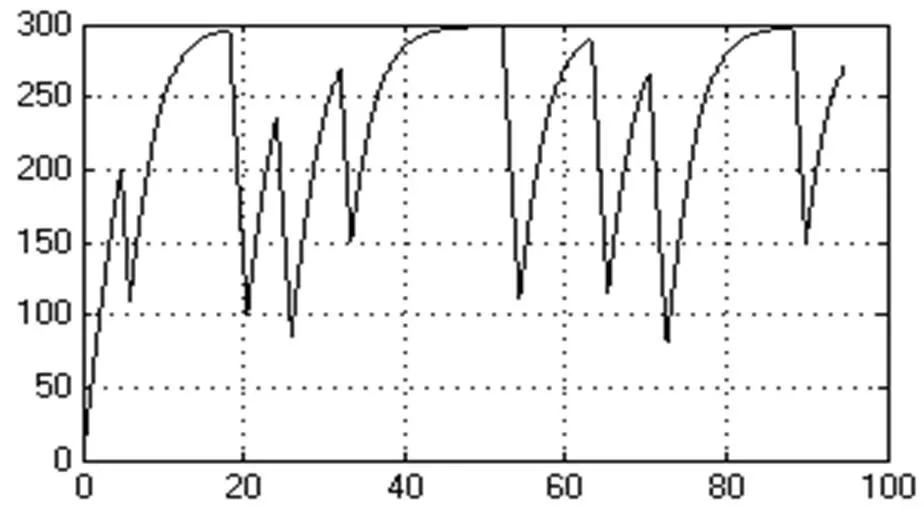
图4 汽车速度图

图5 汽车电压图
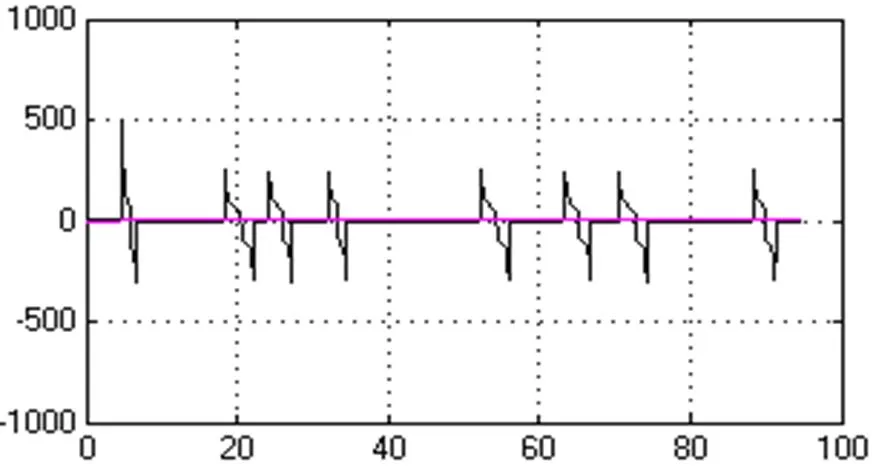
图6 汽车电流值仿真结果

图7 踏板下踩幅度值图

图8 回收能量值图
从图7和图8得出,随着踏板的持续下踩,能量会在每一次下踩的时候冲能,使回收的能量持续增加。
仿真结果表明:当电机制动系统能实现整车制动时,制动力随着电机电枢的增大而增大,同时制动距离变短,回收的能量增多。当电机制动系统不能实现整车制动时,电动汽车的制动力由复合制动系统提供,此时制动力较大,制动距离比较短,制动回收的能量较少。
5 结论
在满足制动约束条件时,电动汽车制动时的能量回收量由制动距离的长短决定,通过控制电机电枢电流来控制制动转矩,从而控制车速和制动距离。当采用复合制动系统时,电机制动系统提供其最大制动力,电动汽车制动回收能量的多少由制动时间决定,此时复合制动力的值由机械制动系统控制,通过调节制动踏板的开度角达到控制车速的目的。
[1] 杨萍,易克传. 安徽发展新能源汽车的SWOT分析[J]. 皖西学院学报,2011(2):97-100.
[2] 冯能莲,么居标,俞黎明,等.电动汽车再生制动控制策略[J]. 北京工业大学学报,2008,12: 1332-1338.
[3] 娄洁,戴龙泉. 电动汽车制动能量回收控制策略研究[J]. 安徽科技学院学报,2010(3):13-18.
[4] Zhang Zhong Liang, Chen Jie. Implementable strategy research of brake energy recovery based on dynamic programming algorithm for a parallel hydraulic hybrid bus[J]. International Journal of Automation and Computing,2014,11(3):249-255.
[5] 王猛,孙泽昌,卓桂荣,等.电动汽车制动能量回收系统研究[J]. 农业机械学报, 2012 (2):6-10.
[6] 周翎霄,宁晓斌,谢伟东. 纯电动汽车液压再生制动能量回收系统的研究[J]. 机电工程, 2013(6):664-668.
[7] 赵轩. 电动汽车制动能量回收系统仿真及控制器设计[D].西安:长安大学,2010.
[8] 唐鹏,孙骏. 电动汽车驱动系统再生制动特性分析与仿真[J].移动电源与车辆,2006(4):37-40.
DESIGN OF ELECTRIC VEHICLE BRAKING ENERGY RECOVERY SYSTEM BASED ON THE COMPOSITE BRAKING
*PENG Shan-shan, ZHAO Xue-song, SHI Pei-cheng
(College of Mechanical and Automotive Engineering, Anhui Polytechnic University, Wuhu,Anhui 241000, China)
A domestic brand of pure electric vehicles is taken as the research object and the recovering and using of car braking energy of automobile is taken as the research target. The braking energy recovery and control method is discussed with the consideration of the vehicle braking dynamics, electric power generation characteristics, battery charging characteristics and other factors. Amechanicalandelectricalcompositebrakingplanofenergy recovery is proposed, and using the Simulink to simulate. The simulation results show that the energy efficiency is higher. It laid a good foundation for further design of specific braking energy recovery system controller.
electric vehicle; brake energy recycling; simulation
1674-8085(2015)04-0059-05
U 469.72
A
10.3969/j.issn.1674-8085.2015.04.011
2015-03-10;修改日期:2015-06-12
*彭闪闪(1989-),女,安徽亳州人,硕士生,主要从事汽车电子方面的研究(E-mail:2091247400@qq.com);
赵雪松(1970-),男,安徽六安人,副教授,硕士,主要从事精密与特种加工和CAD /CAM技术研究(E-mail:405833136@qq.com);
时培成(1976-),男,安徽安庆人,教授,博士,主要从事汽车系统动力学,汽车振动分析和测试技术研究(E-mail:shipeicheng@ahpu.edu.cn).
猜你喜欢
车主之友(2022年6期)2023-01-30
中学生数理化·七年级数学人教版(2021年10期)2021-11-22
汽车维修与保养(2021年8期)2021-02-16
黄河之声(2019年23期)2019-12-17
汽车实用技术(2019年17期)2019-09-21
动漫星空(兴趣百科)(2019年3期)2019-03-07
故事作文·高年级(2017年10期)2017-10-19
黄河之声(2017年13期)2017-01-28
海外星云(2016年17期)2016-12-01
小学阅读指南·低年级版(2016年1期)2016-09-10
