
不规则焊缝的多层多道焊离线编程①
2015-09-18 08:08陈沼欣厦门理工学院机械与汽车工程学院福建厦门604福州大学厦门工艺美术学院福建厦门604厦门思尔特机器人系统有限公司福建厦门60
佳木斯大学学报(自然科学版) 2015年6期
马 林, 刘 俊, 陈沼欣(.厦门理工学院机械与汽车工程学院,福建 厦门 604;.福州大学厦门工艺美术学院,福建 厦门 604;.厦门思尔特机器人系统有限公司,福建 厦门 60)
不规则焊缝的多层多道焊离线编程①
马林1,刘俊2,陈沼欣3
(1.厦门理工学院机械与汽车工程学院,福建 厦门 361024;2.福州大学厦门工艺美术学院,福建 厦门 361024;3.厦门思尔特机器人系统有限公司,福建 厦门 361023)
在robotstudio平台上之上,基于TRIZ理论中IFR的自服务思想,通过c#编程语言对其进行二次开发,利用反馈原理,采用交和互式特征方法对复杂曲线焊缝特征的有效识别.在获取到的焊缝几何信息基础之上,提取坡口特征数据,对多层多道焊进行路径规划.使用方向余弦矩阵对基路径进行平移与旋转变换,解决了复杂路径示教困难问题.仿真与实验结果证明,该方法可靠、有效,提高了焊接效率.
离线编程;特征识别;多层多道
0 引言
由于机器人精确、高效、灵活性对代替人工在恶劣环境下作业起到至关重要的作用,因此,机器人得到广泛应用.目前,机器人主要用于焊接、装配、搬运、涂装、切割等方面,对工业机器人的编程大部分使用的是在线编程方法,通过示教盒使机器人末端(TCP)执行器移动到需要作业的一系列位姿上,并依次把位姿信息存储起来,通过编辑并再现示教过的动作.这种在线编程方式简单、易实现,应用在只需简单作业轨迹并且大批量生产的情况下.使用这种方式,如果任务改变则要重新编程,随着作业任务越来越复杂和应用范围越来越广泛,在线编程不适应当今小批量、多品种的柔性生产的需要,便出现了离线编程技术[1~2].
相对于其他研究,本文采用ABB机器人,基于TRIZ中的IFR自服务思想,在RobotStudio上进行二次开发,导入三维模型后,提取三维模型的焊缝特征点,提取基路径,用方向余弦矩阵对基路径进行偏移和旋转得到多层多道路径,解决了复杂路径示教困难问题.
1 三维模型特征识别
1.1实体三维表示方法
目前常用的形体表示方法主要有扫描变换(Sweep)表示模型、构造实体几何(CSG)表示模型、边界表示(B-Rep)模型、空间分割模型这四种表达方式[2].每种表达方式都有自己的优缺点,因此三维软件实体建模系统一般采用多种模型相互结合的方式.构造实体几何表示模型与边界表示模型相互结合应用的比较广泛.对提取焊缝几何信息,边界表示模型能够提供全面的边界信息,如面、边、点等.
在Robotstudio建模系统中采用的是b-rep(边界表示法),如图1.几何实体是以Part(部件)的形式导入或创建到工作站(station)中.一个部件可以包含若干个实体(body).实体是几何模型中最高等级的对象,它是由其封闭的边界表面(shell)来描述.而实体的封闭边界表面是由面集合(faces)和线集合(Wires)构成.每个面的边界是由一个或多个封闭的环(loops)或边(edges)来描述.除不属于面以外的边都包含在线集合中,环是由一组共边(Coedges)所连接[3].共边一般可看做是边,它保存着边与邻边和边与上级实体的关系.边是由两个顶点(vertex)所界定,一个为起始点,另一个为终止点.顶点表示一个点(point)在空间的位置(position).
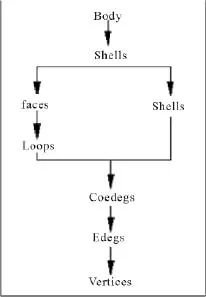
图1 边界表示法
1.2焊缝特征提取方法
在ABB提供SDK文件供用户二次开发,利用反馈原理可以通过Selection.SelectedObjects代码获取选中的面.然后通过对面的遍历(face.loops[].coedges[].eges[]代码)获取面的各条边.如果两个面相交,可以获取它们的相交线(wire).在曲边上任意一点做它的法平面P.P与选中的两个平面相交AD、BC,如图2.通过遍历获取这两条交线的长度以及首末端点的坐标,便可计算出坡口的高度(H)、坡口角度(β)、焊缝宽度(C)、根部宽度(b)等信息.获取到的坡口参数对路径规划提供了信息基础.Robotstudio API提供了获取和设置实体材料属性的方法.通过对实体的遍历,还可以求出板厚等其它的焊接特征.
先定义一个坡口参数的公共类,在主程序中对pokou类实例化,再把AD、BC的长度及首末端点的坐标值赋给pokou类相应的变量,再调用pokou. parameters()计算出坡口参数.具体参数代码如下:
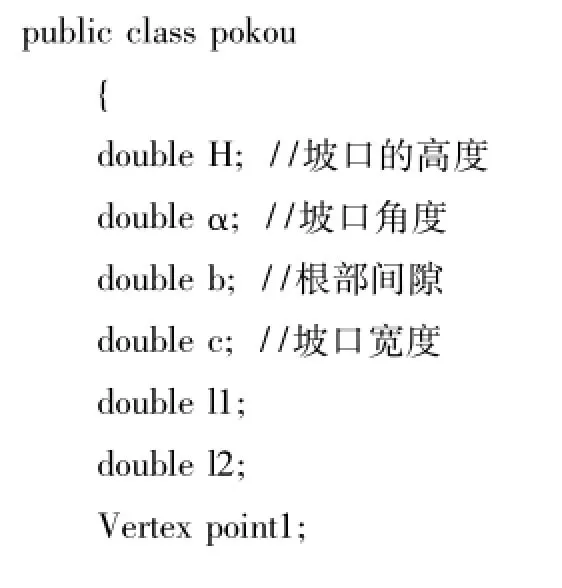
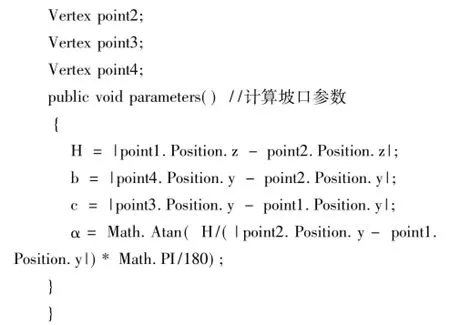
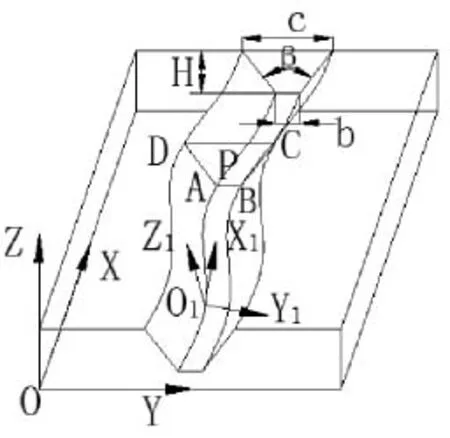
图2 焊接工件示意图
2 机器人路径规划
2.1基路径位置确定
选取曲面1的下曲边作为焊枪行走路径的基路径.对下曲边离散出若干个点,点越密集,行走路径与曲线越接近.这些离散点只包含坐标信息(参考系为大地坐标).给这些离散点赋予姿态并建立点坐标系,如图2.以离散点所在曲线上位置的切线方向为X1轴方向,其方向矢量可由函数Edge. GetTangent Method(Vector3)求出.垂直并背离工件的方向为Z1轴方向,其向量与工件坐标系的Z0方向一致.Z0方向矢量可以采用三点法建立工件坐标系求得.Y1轴方向矢量可以由公式(1)和(2)求得.

把这些被赋予姿态的离散点称为目标点(target).将这些目标点添加到运动路径Path中并添加相应的运动指令,让焊枪走直线(moveL)或圆弧(moveC).机器人将严格按着这些目标点的位姿行走.
2.2路径变换
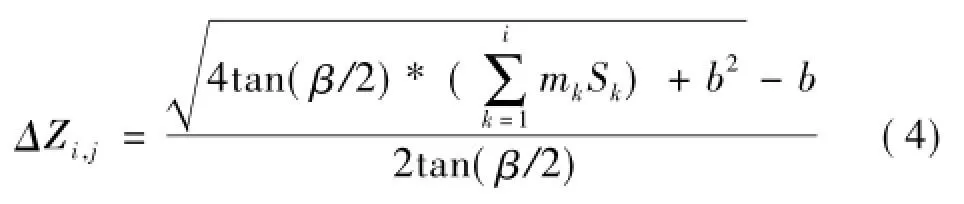
通过之前获取到的坡口参数(坡口角度β和根部宽度b)、板厚、材料等信息,调用焊接专家数据库可以确定焊接所需要的总层数n、第i层有mi道、以及i层的每道焊缝的熔敷面积为Si(由焊接参数求出).其中i,j的取值范围分别[1,n]和[1,i].因此可以计算出每道焊接所在坡口截面的偏移量.
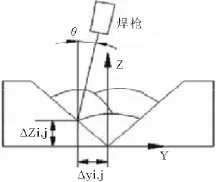
图3 焊枪姿态示意图

图4 交互界面
焊枪反向偏移量为:
垂直焊缝横移量:
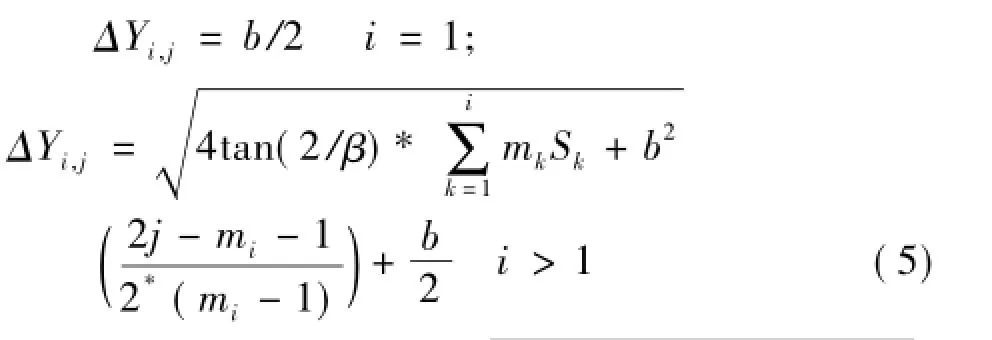
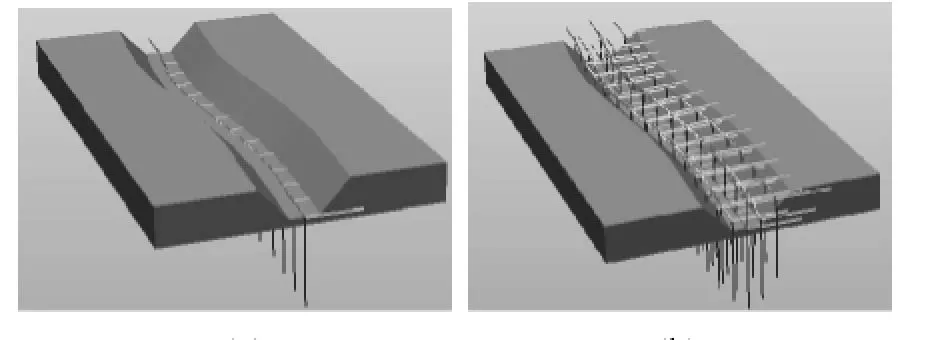
图5 仿真路径
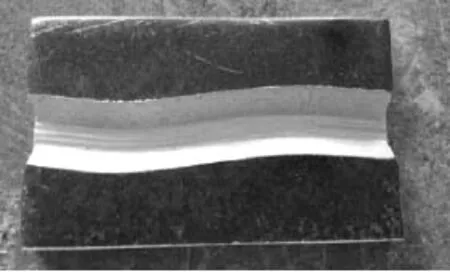
图6 焊接工件
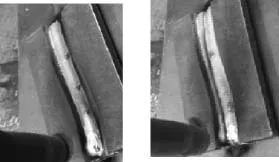
图7 焊接过程图

焊枪运动到每个目标点时,在相应的点坐标系中有不同的姿态.为了避免焊枪与工件相碰,采用自服务的方式,对焊枪角度进行一定的偏转.如图3,焊枪的偏转角度为该目标点位置与焊缝坡口重新组成的坡口的平分线,焊枪的偏转角度θ.已知坡口角度β,坡口高度H,则焊枪的偏转角度θ为式(7)求得.
对焊枪姿态偏转:
3 软件实现与仿真
3.1软件实现
首先在robotstudio中导入或创建要焊接的工件,运行addin插件,弹出CreatePath窗口下的子窗口(基本).如图4.选择焊接接头、选取焊道表面,则自动生成坡口示意图.切换到生成路径子窗口,连接专家数据库,自动填充工艺参数,也可以根据焊接需要人工输入焊接工艺参数并保存到专家数据库,下次焊接可直接调用.点击生成全路径,则焊接路径全部生成.通过仿真来检验路径是否生成正确,通过路径调试子窗口可以插入、修改目标点来修正焊接路径.
3.2仿真分析
用ABB机器人做实验,在离线编程里面提取的第一条轨迹如图5(a)所示,提取焊接专家库里信息,通过方向余弦矩阵对基路径进行偏移和旋转得到多层多道路径,如图5(b)所示,为三层六道焊接路径.
4 实验
实验工件板厚为10mm,开坡口角度为60度、坡口高度为8mm、底部宽度为4mm,如图6.通过上述方法得到的焊接路径,采用ABB机器人2400L配合福尼斯(Fronius)焊机进行焊接实验
焊接结果表明,用该种方法进行离线编程,容易得到不规则焊缝的焊枪控制,减少示教时间,解决了不规则焊缝难于示教问题,焊接效果质量稳定,提高了焊接效率.
5 结论
(1)采用交互式特征方法实现了对复杂曲线焊缝特征的有效识别.通过特征识别提取到的坡口信息为后续的路径规划提供了信息基础.
(2)使用方向余弦矩阵把点坐标系转换为大地坐标系,实现了目标点的平移与旋转变换,对基路径所有的目标点进行变换,完成了对开梯形复杂曲线坡口进行路径规划.
(3)仿真与实验证明,该方法能大大减少对复杂焊缝的示教困难和时间长问题,特别是配合中厚板焊接专家库对多层多道的示教时间,并能保证焊接质量.
[1]徐呈艺,许丽娇,吴炜.基于DXF文件的工业机器人离线编程技术[J].南通职业大学学报,2008,22(3):68-70.
[2]陈焕明,熊震宇,刘频.弧焊机器人离线编程系统的设计与实现[J].上海交通大学学报,2008,(42):25-26.
[3]刘彤,田劲松,吴林.焊接工件特征建模中焊缝特征的识别方法[A].第十次全国焊接会议论文(第二册),2001.
Irregular Weld Multilayer Multichannel Welding off-line Programming
MA Lin1, LIU Jun2, CHEN Zhao-xin3
(1.Xiamen University of Technology,Xiamen 361000 China;2.Xiamen Academy of Arts and Design Fuzhou University,Xiamen 361000 China;3.Xiamen Siert Robot System Co.,LTD.Xiamen 361000 China).
Arc welding,especially complex welding,often takes a lot of time for robot posture teaching. The off-line programming is quite important due to the welding robot walking instructions for arc and straight line,commonly for irregular curve need through many point to the path of this curve.complex welding,arc welding robot welding space of robot posture teaching often occupy a lot of time,and the welding robot walking instructions for arc and straight line,commonly for irregular curve need through many point to the path of this curve,therefore highlight important off-line programming.In robot studio platform,based on TRIZ theory in about the IFR since the service idea that the complex curve weld characteristics is effective recognition by using through the c#programming language for secondary development,the feedback principle and interactive method.The multilayer multipass welding path is planned by accessing to the weld geometry information,groove feature data extracted.for complex curve weld characteristics of effective recognition.In access to the weld geometry information,data,groove feature extracting of multilayer multipass welding path planning.Solving the complex path teaching difficult problem via using the direction cosine matrix on the base path for translation and rotation transformation.,to solve.Simulation and experimental results show that this method is reliable,effective,welding efficiency improved.
off-line programming;Feature recognition;Multilayer multichannel
TP242
A
1008-1402(2015)06-0884-04
2015-11-11
福建省创新方法推广应用体系建设(2012IM021500).
马林(1980-),男,吉林长春人,学士学位,厦门理工学院讲师,创新方法TRIZ研究.
猜你喜欢
现代农机(2022年3期)2022-07-11
中国金属通报(2022年1期)2022-06-02
防爆电机(2021年4期)2021-07-28
锻压装备与制造技术(2021年2期)2021-07-19
中国特种设备安全(2021年11期)2021-05-05
铁道通信信号(2020年6期)2020-09-21
组合机床与自动化加工技术(2019年11期)2019-11-27
中成药(2018年2期)2018-05-09
焊接(2016年6期)2016-02-27
大型铸锻件(2015年4期)2016-01-12
