
基于工业可编程控制器对液体自动混合装置系统设计
2015-08-06 03:31:10汪志强石建飞张冬梅
黑龙江八一农垦大学学报 2015年3期
汪志强,石建飞,张冬梅
(黑龙江八一农垦大学信息技术学院,大庆 163319)
传统的两种液体混合装置无论采用人工控制还是继电器控制系统,都存在连接电器多、可靠性差、自动化程度低等诸多问题[1]。采用PLC 具有小型化、高速度、高性能等特点,可编程控制器指令丰富,可以接各种输出、输入扩充设备,有丰富的特殊扩展设备,其中的模拟输入设备和通信设备是系统所必需的,能够方便地联网通信[2]。可编程控制器液体自动混合控制系统由传感器送入设定的参数实现自动控制;启动后能自动完成一个周期的工作,并循环。
1 控制要求及初始状态
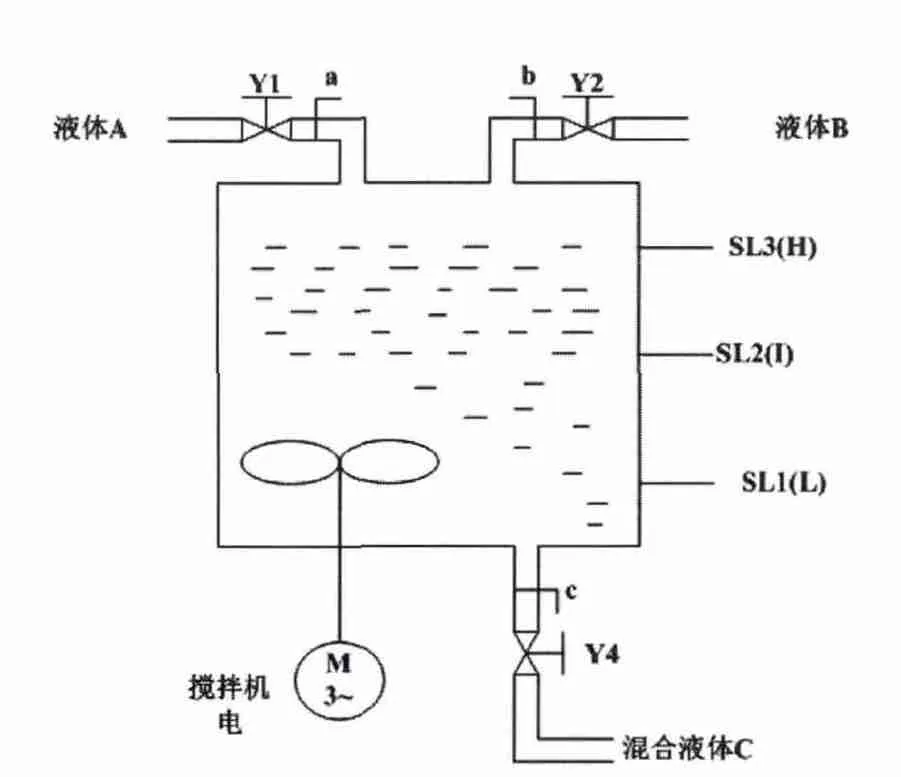
图1 系统工作示意图Fig.1 Schematic diagram of system
图1 是系统工作示意图,图中SL1(L)、SL2(I)、SL3(H)为三个液位传感器,液体淹没时接通。进液阀Y1、Y2 分别控制液体A 和液体B 进液,出液阀Y4控制混合液体C 出液。a、b、c 分别代表三个流量计,监控两条进管道和一条出管道的流量。设计是对两种液体混合搅拌控制,控制要求及初始状态如下所示:
初始状态:打开混合液体C 电磁阀门Y4,延时10 s 后自动关闭;
启动操作:按下启动按钮SB1,液体装置开始按以下顺序工作:
(1)进液电磁阀Y1 打开,液体A 流入罐内,液位上升。
(2)当到达SL1 时,进液阀Y1 关闭,A 液体停止流入,同时打开进液阀Y2,B 液体开始流入容器。
(3)当到达SL2 时,进液阀Y2 关闭,B 液体停止流入,同时搅拌电动机开始工作。
(4)当搅拌电机定时正向搅拌10 s 反向搅动10 s 后制动停止搅拌,同时Y4 打开,开始放液,液位开始下降。
(5)当液位下降到SL1(L)处时,开始计时10 s后关闭放液电磁阀Y4,自动开始下一个循环。
停止操作:工作中,若按下停止按钮SB2,延时3 s 设备停止工作。
报警:当罐体内的液体达到最高液位SL3 时,超过该液位,系统将报警,且停止工作,定时10 s。
2 系统方案的设计
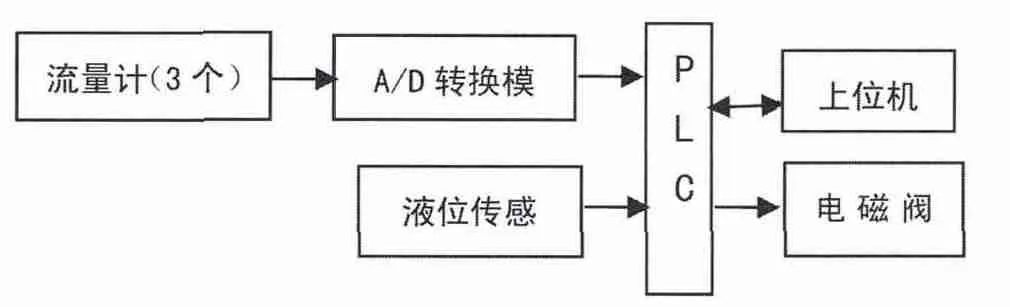
图2 控制系统框图Fig.2 Block diagram of control system
控制系统框图如图2 所示,三个流量计采集管道内的流量并将采集来的模拟量传送给AD 转换模块转换成数字信号;三个液位传感器根据测得水位情况输出开关量;PLC 对两路信号进行处理,控制电动阀门的开关,和搅拌机的动作,同时所有数据都传送给上位机进行监控。
3 液体自动混合系统的硬件电路设计
3.1 器件选择
液体自动混合装置器件选择如表1 所示。
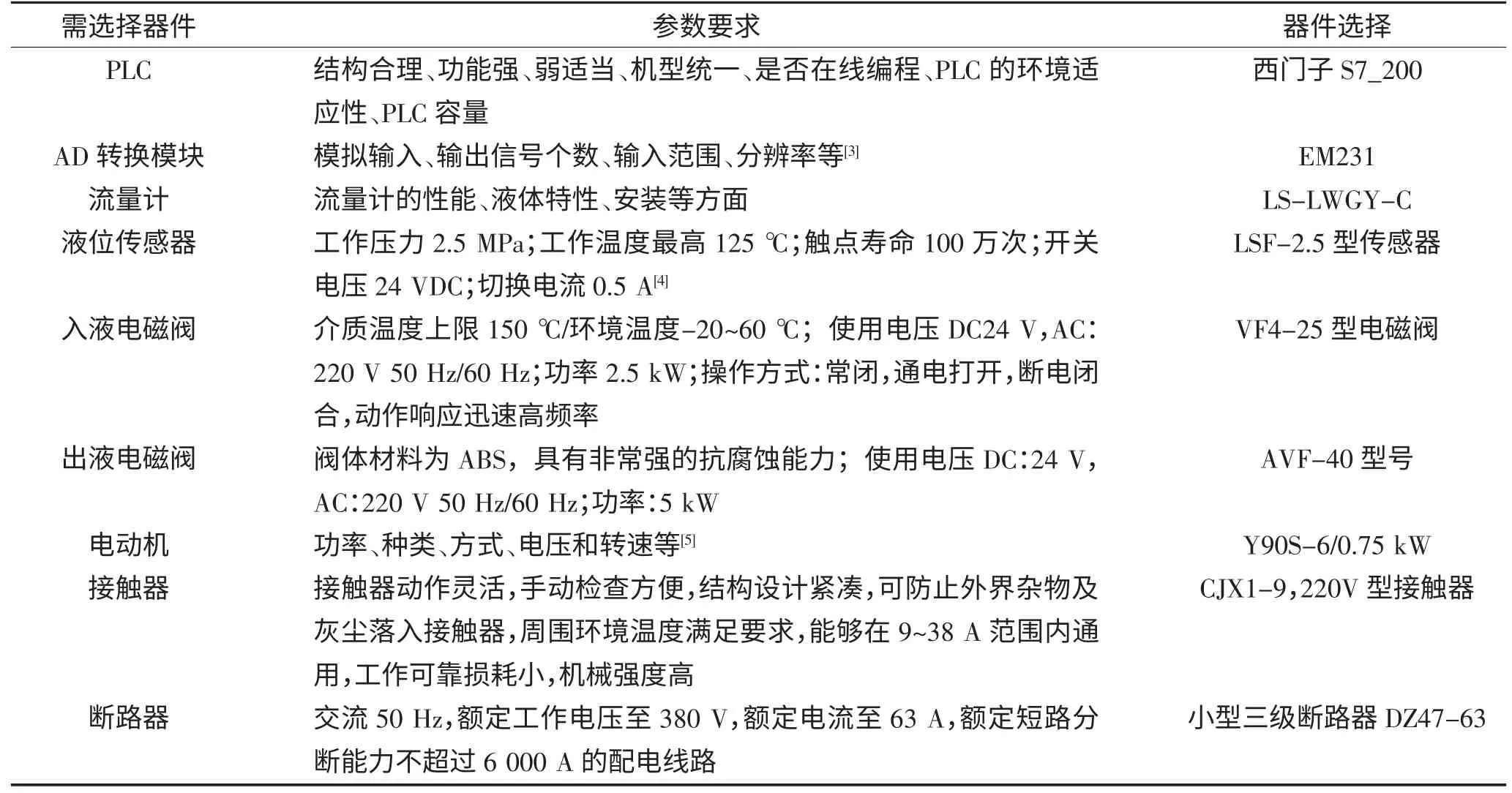
表1 液体自动混合装置器件选择Table 1 Component selection on mixing device of automatic liquid
3.2 PLC I/O 点分配
根据液体混合控制系统要求,共有5 个数字量输入和6 个数字量输出,CPU 型号可以选择S7-200PLC 的CPU224(本机上有14 个数字量输入和10个数字量输出)。由于系统需要显示灌装的灌数,产量上限为1 600,可以使用4 个带译码电路的BCD数码显示管显示灌装产量,这样就另外需要16 点数字量输出。可以使用2 个数字量输出扩展模块EM233(DC24V)或使用一个数字量输入/输出混合扩展模块EM233(DI16/DO16*DC24V)[6]。
该系统所使用的输入输出设备的I/O 分配如表2 所示。
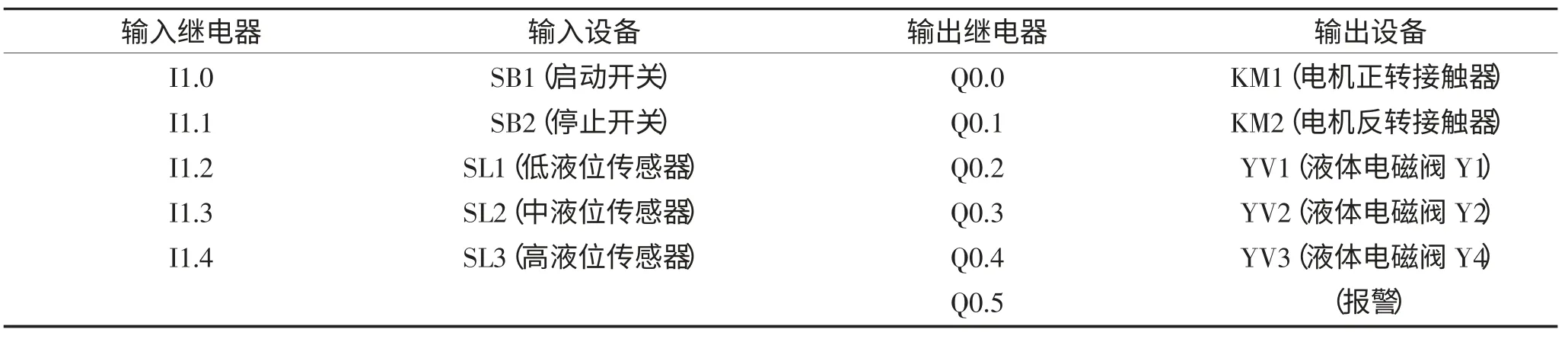
表2 输入和输出设备的I/O 分配表Table 2 Input and output devices of I/O allocation table
3.3 硬件电路图
3.3.1 电机主电路图
设计中的混合液体搅拌由电动机M 启动。带有短路保护、过载保护等,短路保护由FU 熔断器来实现保护功能,过载保护由FR 热继电器来实现其保护功能。启动过程是QS 闭合,当KM1 常开触点闭合,电机M 正向转动;当KM2 的常开触点闭合,电机M反向转动。主电路中保护装置选择的是CJX1-9,220V 型 接 触 器、DZ47-63 系 列 小 型 断 路 器、JR16B-60/3D 型热继电器和型号为Y90S-6/0.75KW的电动机。主电路如图3 所示。
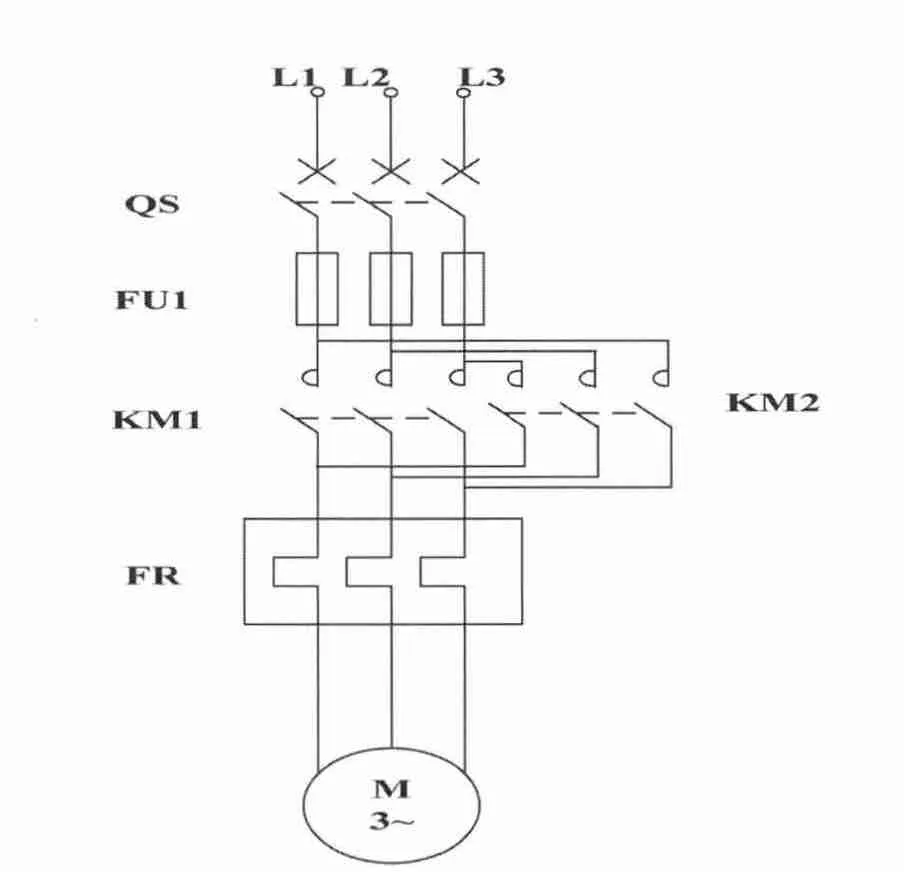
图3 主电路Fig.3 The main circuit
3.3.2 PLC 的I/O 接线图
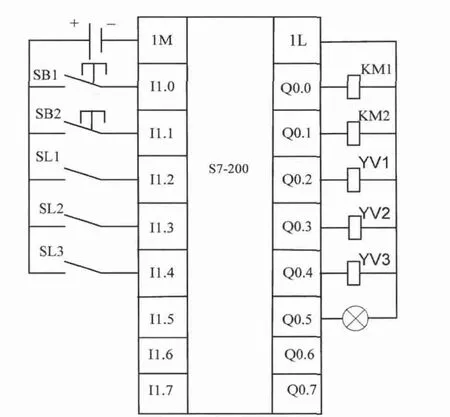
图4 PLC 的I/O 接线图Fig.4 Wiring diagram of PLC I/O
3.3.3 AD 模块接线图
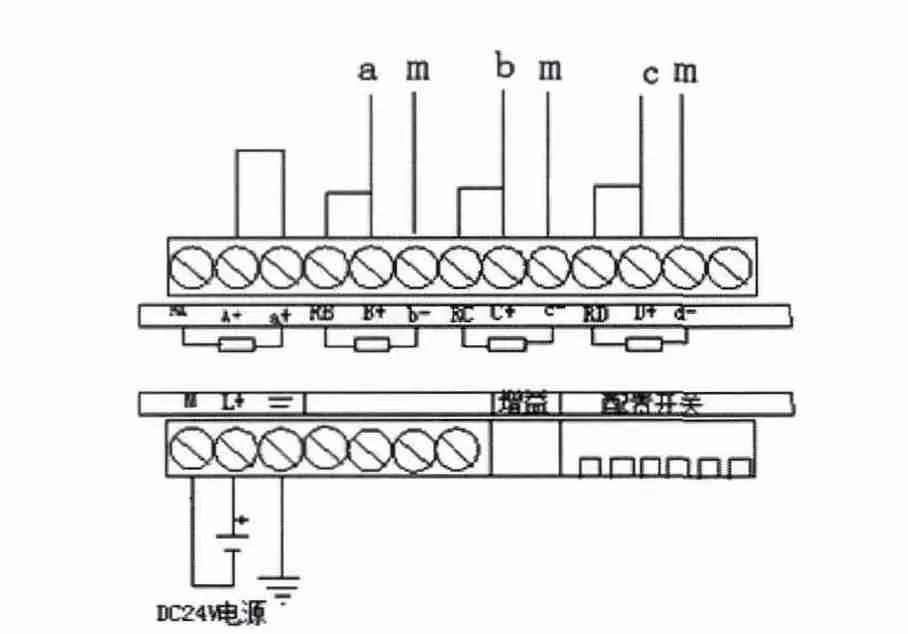
图5 AD 模块接线图Fig.5 Diagram of AD module
AD 模块EM231 主要用于扩展S7200PLC 模拟量测量能力,本系统主要完成三个液位传感器a、b、c模拟信号的采集,将其转换成数字量,通过总线接口与PLC 相连。
4 液体自动混合系统的软件设计
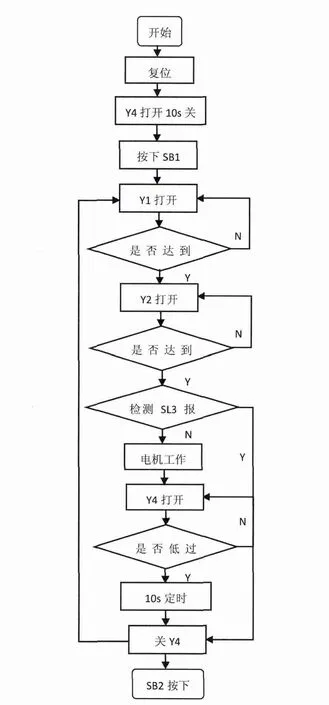
图6 程序流程图Fig.6 Flow chart of program
5 人机界面设计
系统监控软件采用了北京三维力控公司的ForceControl6.1 组态软件,它是北京三维力控科技有限公司开发的一个集成人机界面(HIM)系统。与力控早期产品相比ForceControl6.1 产品在数据处理性能、答错能力、界面容器、报表等方面产生了巨大的飞跃。
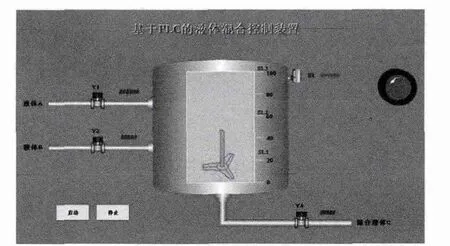
图7 组态图Fig.7 Diagram of configuration
组态图7 中有液体罐,电磁阀门,液位计、管道、搅拌器和报警指示灯,当点击启动按钮则Y1 阀门打开,注入A 液体,到达液位SL1 时,Y1 关闭,同时Y2打开,注入B 液体。到达液位SL2 时Y2 关闭,电机转动开始搅拌,到一定时间后Y4 打开,开始排放液体。当液位到达SL3 时系统开始报警,报警指示灯闪烁,10 s 后系统停止工作。
6 结论
利用西门子S7200 可编程控制器实现对多种液体各种混合状态实现自动控制,实现在混合过程的精确控制要求,提高了液体混合比例的稳定性、运行稳定、自动化程度高,并通过组态界面显示液体水位混合状态,当液体水位超限时,完成报警显示,适合工业生产的需求。
[1]邹义龙,许杰,张东辉,等.基于S7-200PLC 的液体混合装置控制系统软件设计及仿真[J].河北建筑工程学院学报,2012,31(2):107-109.
[2]康忠伟,石莉莉,孙艳波.抽水电机组节能控制装置的研究与设计[J].黑龙江八一农垦大学学报,2013,25(6):74-78.
[3]赵景波.西门子S7-200PLC 实践与应用[M].北京:机械工业出版社,2012.
[4]李向东.电气控制与PLC[M].北京:机械工业出版社,2007.
[5]唐介.电机与拖动[M].北京:高等教育出版社,2007.
[6]阮友德.电气控制与PLC 实训教材[M].北京:人民邮电出版社,2006.
猜你喜欢
组合机床与自动化加工技术(2022年5期)2022-06-08 05:39:58
中国科技纵横(2021年22期)2022-01-08 02:15:38
河北农机(2020年10期)2020-12-14 03:13:42
中国设备工程(2020年6期)2020-05-12 11:32:16
课程教育研究·学法教法研究(2017年22期)2018-06-08 20:39:10
凿岩机械气动工具(2017年2期)2017-07-19 10:21:13
工业设计(2016年11期)2016-04-16 02:49:22
科学家(2015年12期)2016-01-20 02:50:29
中国科技纵横(2015年21期)2015-12-14 09:21:59
中国铸造装备与技术(2015年5期)2015-12-10 10:23:41
