
基于双DSP与FPGA的稳定跟踪平台系统
2015-07-31 19:40:20扈宏杰
电气传动 2015年9期
扈宏杰,梁 洋
(北京航空航天大学自动化科学与电气工程学院,北京100191)
HU Hong⁃jie,LIANG Yang
(College of Automation Science and Electrical Engineering,Beijing University of Aeronautics and Astronautics,Beijing 100191,China)
基于双DSP与FPGA的稳定跟踪平台系统
扈宏杰,梁 洋
(北京航空航天大学自动化科学与电气工程学院,北京100191)
提出了一种采用双DSP与FPGA构成的3轴自稳定跟踪平台控制系统。介绍了系统构成、控制原理及软件流程。详细说明了系统的控制机制,主要包括对陀螺与码盘信号的采集与处理、上下位机之间的CAN通讯以及DSP与FPGA之间的信息交互等内容。最后给出了稳定跟踪平台的控制结果,实现了50 μrad以内的稳定精度控制和2个像素以内的跟踪精度控制,完成了系统隔离载体扰动、高精度跟踪动态目标的功能。
双DSP与FPGA;稳定精度;跟踪精度
稳定跟踪平台集惯性导航、微惯性传感器、数据采集及信号处理、精密机械动力学建模仿真和设计、电机运动控制、图像处理和光学仪器应用等多项技术于一身,是以机电一体化、目标识别自动控制技术为主体,多个学科有机结合的产物[1-2]。其主要功能是隔离载体(导弹、飞机、战车、舰船)扰动,完成对动态目标的高精度跟踪。在航空侦察摄影观测设备、机载目标指示器、空间遥感探测和海底声纳探测等领域,稳定跟踪平台都得到了广泛的应用[3]。
本文以机载3轴稳定跟踪平台控制系统的设计为背景,为了满足现代系统小型化、集成化的需求[4-7],采用了基于双DSP与FPGA的嵌入式系统结构。文中从系统构成、控制原理及软件流程3个方面对系统进行了介绍,说明了采用双DSP与FPGA结构的系统的控制机制,给出了系统的控制结果。
1 系统总体概述
1.1 系统构成
本设计中稳定跟踪平台的系统构成如图1所示。红外热像仪采集动态目标信息,经过视频处理单元处理,将图像传送至显示界面显示,操作人员根据图像进行判断,通过控制面板下达扫描、引导或者跟踪等指令,伺服机构根据上位机下达的指令,完成相应的指令操作。其中,视轴稳定是通过速率陀螺采集载体扰动信息,构成视轴稳定内回路实现的;动态目标跟踪是由图像跟踪器得到目标脱靶量信息,组成自动跟踪回路,完成空间闭环实现。
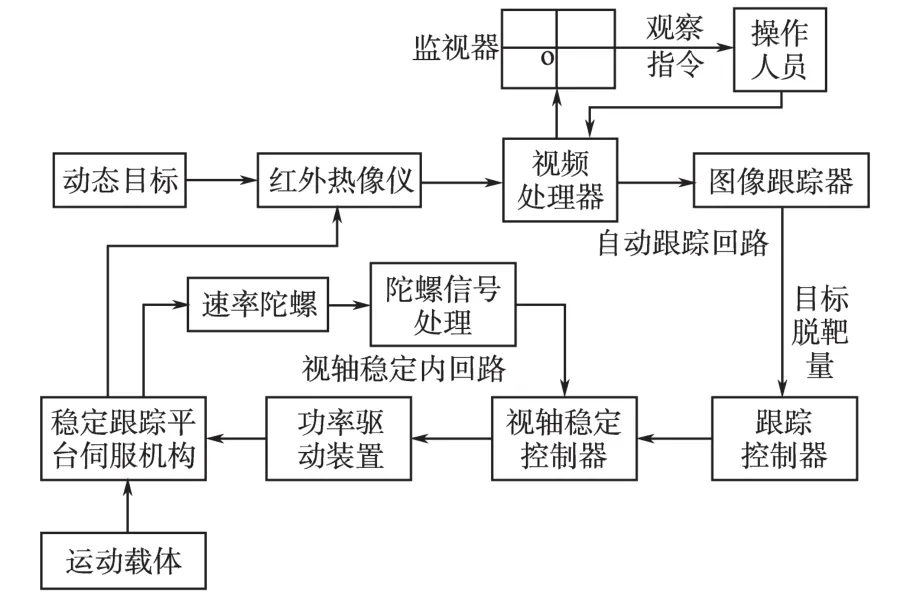
图1 稳定平台系统构成示意图Fig.1 The stable platform system structure diagram
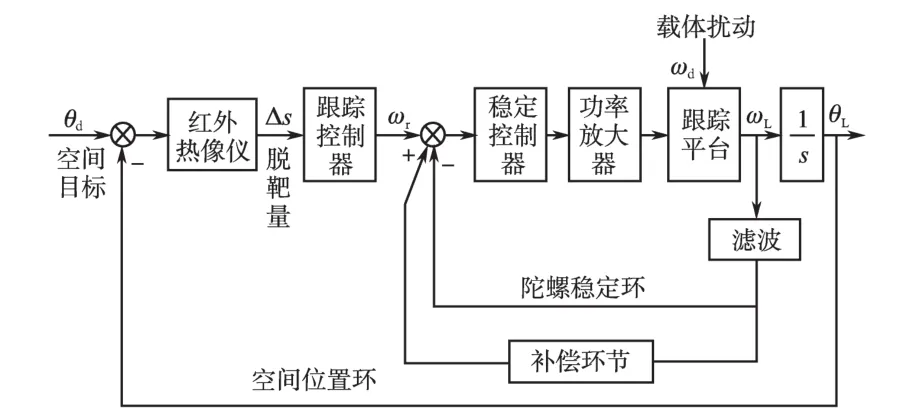
图2 系统控制框图Fig.2 Block diagram of control system
1.2 系统控制原理
稳定跟踪平台的系统控制框图如图2所示,图2中θd为目标空间位置,θL为视轴实际指向位置,Δs为脱靶量信息,ωr为跟踪控制器输出的指令速度,ωd为载体的扰动速率,ωL为平台空间速度。平台控制采用位置环与速度环组合的双闭环典型控制结构,其中位置环的主要功能是保证高精度跟踪,故称为跟踪回路,速度环的主要功能是保证视轴稳定,故称为稳定回路。位置闭环的偏差信号为从红外热像仪采集的图像中提取出的脱靶量信息,跟踪控制器为传统的PD控制器;速度环指令信号为跟踪控制器输出,反馈信号为载体扰动速率与电机转速合成的空间速度,稳定控制器为PID控制器,其输出的控制信号经功率放大器放大后直接作用于平台,完成整个系统的闭环控制。此外,在系统的控制内环中还引入了补偿环节,补偿环节包括速度补偿与加速度补偿,其中,速度补偿可以提高系统的响应速度,加速度补偿对电机死区具有很好的抑制作用,可以提高系统刚度,引入补偿环节有助于进一步改善系统的控制效果。跟踪回路、稳定回路与补偿环节共同作用,保证了控制系统的控制性能。
1.3 控制系统软件流程
控制系统的采样周期与控制周期都是1 ms,系统控制流程如图3所示。进入时间中断之后,首先读取码盘与陀螺数据,并对这些数据进行处理,获得码盘转角以及陀螺与码盘的滤波速度,然后进行模式判断,如果工作在跟踪模式,则读取此时的脱靶量信息,完成系统空间闭环控制,如果工作在其他模式,则直接根据码盘信息进行控制闭环,将所得的控制结果输出后结束本次中断,等待定时器定时时间到达后开启下次中断。
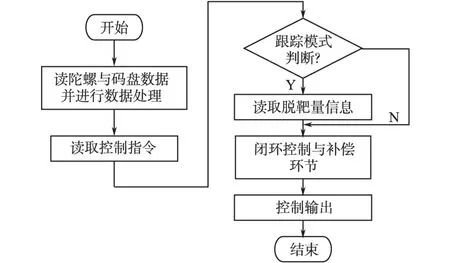
图3 1ms中断控制流程图Fig.3 Control flow graph with interrupt of 1 ms
2 双DSP与FPGA组合结构控制机制
本系统中采用双DSP与FPGA组合结构进行系统控制,其中DSP芯片采用TI公司生产的TMS320F28335,该芯片为浮点型DSP,主频最高可达150 MHz,并且内部集成了CAN接口、SPI接口、PWM接口等诸多外设接口,非常适合于控制领域。FPGA芯片采用Altera公司生产的Cyclone系列芯片EP1C12Q240,该芯片内部集成12 060个逻辑单元,173个I/O引脚,满足本系统的要求。系统接口示意图如图4所示。
DSP2的主要功能是与上位机进行通讯,与DSP1进行信息交互以及完成对横滚电机的控制;DSP1的主要任务是根据DSP2传达的指令进行相应的操作、完成对方位与俯仰电机的控制;FPGA的主要功能是采集3自由度速率陀螺信号与3轴码盘信号,完成2片DSP之间的信息交互。
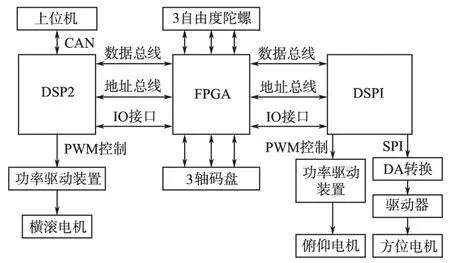
图4 系统接口示意图Fig.4 System interface diagram
上位机指令通过CAN总线传输到伺服控制机构,本系统中CAN总线的通讯速率设置为1 Mb/s,采用11位标准格式标识符,数据场的数据长度为8个字节,保证了数据与指令交互的实时性。
对于采集码盘信号,有以下两种方案:
1)由FPGA以较高的波特率进行数据多次采集,DSP需要数据时对读信号进行判断,当处于可读状态时(读信号引脚置低)读取码盘数据,此种方式是以FPGA读取为主的读取方式,故DSP为被动读取方式;
2)采集方式是进入时间中断时,DSP芯片将读信号引脚置高,当FPGA检测到上升沿时,进行数据采集,DSP芯片等待足够的采集时间后将引脚置低并进行数据读取,相对于之前被动式的读取方式,此种方式可认为是DSP主动读取方式。
两种读取方式中,第1种读取方式要求FPGA在读取数据时有较高的波特率,实现一个控制周期内数据的多次采集,采集次数越多,所采集数据就接近于DSP采样时刻的码盘数值,对于较高波特率的采集系统可以采取此种方法;主动式读取方式在1个控制周期内FPGA芯片只需对码盘信号进行1次采集,而且采集波特率不需要很高,DSP获得的数据是读取引脚置高后固定时间的数值,这样可以保证采集的数据在每个采样周期内为同一时刻的码盘数值,保证了控制的准确性。相对于被动式读取方式,主动式读取方式具有操作简单,FPGA的资源开销小以及不受码盘信号采集波特率限制等优点,故本设计中采用主动式读取方式。
2片DSP之间的信息交互与指令传递通过FPGA完成,DSP的数据总线与地址总线分别与FPGA相连,由于是异步通信机制,2个DSP之间进行信息交互时需要硬件握手。具体实现如下:当进行写操作时,DSP首先将用于硬件握手的引脚置高,为防止此时另1个DSP正在读取数据,延时等待读取指令的最大时间,等待结束后,将数据通过总线写入FPGA芯片中,写操作完毕后将相应的引脚置低,完成此次写操作;当进行读操作时,DSP芯片首先判断用于硬件握手的引脚状态,如果为低,则直接通过总线读取FPGA芯片中相应数据,如果为高,说明此时另1个DSP芯片的写操作正在进行,则等待,直至引脚状态为低时,读取数据。此种读写机制有效防止了读写过程中的冲突,保证了数据传递的正确性。
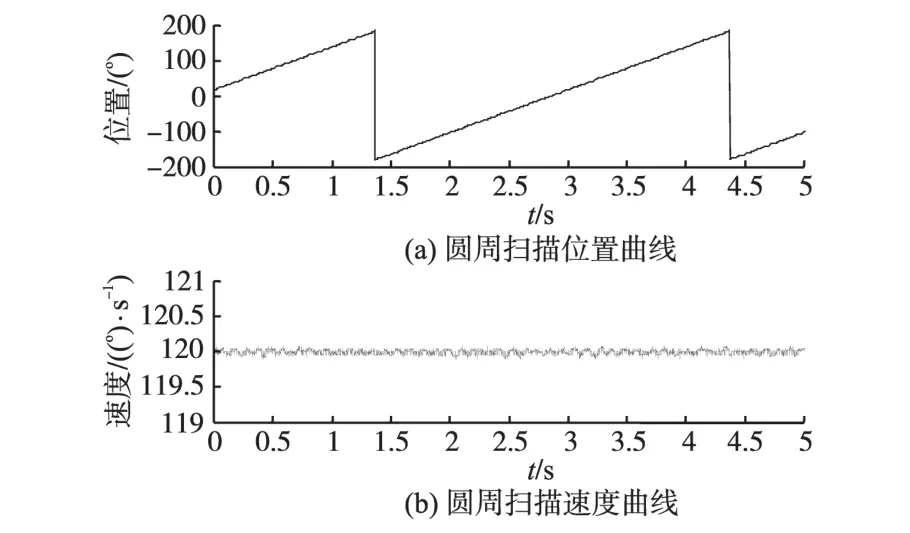
图5 圆周扫描电机控制曲线图Fig.5 Motor control curves of circular scanning
3 控制结果
稳定跟踪平台的主要功能是对一定区域进行扫描搜索,当搜索到目标后立即转为跟踪状态进行目标跟踪。系统的最终控制效果受到机械谐振、负载弹性形变、摩擦阻尼、电机死区以及其它诸多因素的影响。本设计中稳定跟踪平台实现了较高的控制精度,稳定精度达到了50 μrad以内,对于动态目标的跟踪精度达到了2个像素以内(1个像素为0.004 12°),满足了系统的设计要求。
图5为圆周扫描的电机输出转角与差分速度曲线。从曲线中可以看出,系统在圆周扫描过程中扫描速度平稳,为图像处理单元捕获目标、实现目标跟踪提供了前提。跟踪性能测试采用跟踪动态旋转靶标来实现,靶标做椭圆运动,其在2个自由度上的脱靶量曲线如图6所示。图7为稳定跟踪平台捕获与跟踪过程中脱靶量变化曲线,从曲线中可以看出,系统具有较快的捕获过渡过程与较高的跟踪精度,实现了稳定跟踪平台对动态目标稳定、高精度跟踪的功能。
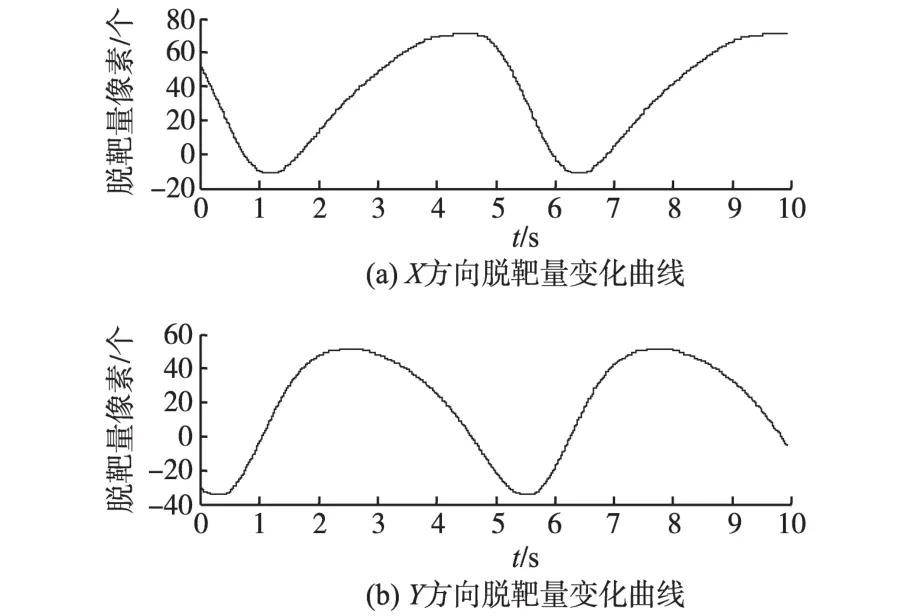
图6 未跟踪状态脱靶量变化曲线图Fig.6 Miss distance change curves without tracking
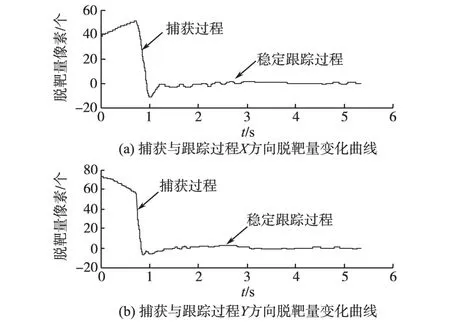
图7 捕获与跟踪过程脱靶量变化曲线图Fig.7 Miss distance change curves during acquisition and tracking
4 结论
本文讨论了基于双DSP与FPGA结构的稳定跟踪平台控制系统的构成、控制原理以及软件流程,详细介绍了采用双DSP与FPGA组合结构系统的控制机制,具体包括系统与上位机的通讯方式、码盘与陀螺信号的采集与处理、控制器之间信息交互的实现方式等内容,最后给出了稳定跟踪平台的实际控制结果。
本文的研究结果表明,基于双DSP与FPGA的稳定跟踪平台控制系统具有较好的动态跟踪能力,实现了50 μrad以内的稳定精度控制及2个像素以内的跟踪精度控制,满足了系统的设计要求,实现了对动态目标稳定、高精度跟踪的功能。
[1]Steven J H,Larry A S,Douglas E C.Acquisition,Tracking and Pointing System for Self⁃protection Applications[C]// SPIE Conference on Acquisition,Tracking,and Pointing XII,1998,3365:22-29.
[2]Timothy P R,Megan M B,William EC,et al.Stabilized Electro⁃optical Airborne Instrumentation Platform(SEAIP)[C]//Proceedings of SPIE,2004,5268:202-209.
[3]施峥嵘.车载设备视轴稳定与跟踪技术研究[D].南京:东南大学,2006.
[4]王惠文,江先进.光纤传感技术与应用[M].北京:国防工业出版社,2001.
[5]吴鹏.精确制导光电导引头稳定平台数字控制技术[J].弹箭与制导学报,2002,22(3):37-41.
[6]秦继荣,沈安俊.现代直流伺服控制技术及其系统设计[M].北京:机械工业出版社,1999.
[7]赵长德,张煜,陈科.具有C196微控制器的瞄准线稳定与自动跟踪系统[J].清华大学学报,1998,38(11):23-27.
Stable Tracking Platform System Based on Dual DSP and FPGA
Proposed a three⁃axis self⁃stabilizing tracking control system which was composed by dual DSP and FPGA.Introduced the system structure,control theory and software processes.A description of the control mechanism of the system was discussed in detail,including the gyro and encoder signal acquisition and processing,CAN communication between the PC and lower processor,information exchange between the DSP and the FPGA.The control result given at last indicates that the stable tracking platform realized the functions of isolating carrier disturbance and tracking dynamic targets precisely,and accomplished the accuracy of 50 μrad in stability and two pixels in tracking.
dual DSP and FPGA;stable accuracy;tracking accuracy
TP273
A
HU Hong⁃jie,LIANG Yang
(College of Automation Science and Electrical Engineering,Beijing University of Aeronautics and Astronautics,Beijing 100191,China)
2014-10-20
修改稿日期:2015-04-21
扈宏杰(1962-),男,博士,副教授,Email:hhj@buaa.edu.cn
猜你喜欢
科普童话·神秘大侦探(2023年1期)2023-05-30 12:48:10
机械设计与制造(2022年4期)2022-04-28 04:32:10
科技视界(2019年11期)2019-06-20 01:22:08
测控技术(2018年5期)2018-12-09 09:04:26
电子测试(2018年18期)2018-11-14 02:30:34
发明与创新(2016年23期)2016-10-13 02:16:14
湖北工业大学学报(2016年5期)2016-02-27 13:14:51
新媒体研究(2014年21期)2014-12-16 20:45:26
湖南有色金属(2014年3期)2014-07-02 00:03:27
机电信息(2014年27期)2014-02-27 15:53:56
