磁流变液力觉驱动器的优化设计方法
2015-07-18 11:14:10戴金桥俞阿龙王爱民
淮阴师范学院学报(自然科学版) 2015年3期
戴金桥,俞阿龙,王爱民,韦 魏
(1.淮阴师范学院 物理与电子电气工程学院,江苏 淮安 223300; 2.江苏省现代检测技术与智能系统重点建设实验室,江苏 淮安 223300;3.东南大学 仪器科学与工程学院,江苏 南京 210096; 4.江苏省远程测控技术重点实验室,江苏 南京 210096)
磁流变液力觉驱动器的优化设计方法
戴金桥1,2,4,俞阿龙1,2,王爱民3,4,韦 魏1
(1.淮阴师范学院 物理与电子电气工程学院,江苏 淮安 223300; 2.江苏省现代检测技术与智能系统重点建设实验室,江苏 淮安 223300;3.东南大学 仪器科学与工程学院,江苏 南京 210096; 4.江苏省远程测控技术重点实验室,江苏 南京 210096)
根据力觉交互的需要,提出了一种基于磁流变液力觉驱动器的优化设计方法.介绍了磁流变液力觉驱动器的结构、原理及其动力学模型,用无因次量替代动力学模型中的相应参数得出无因次动力学模型,分析了在磁流变液宾汉值为常数的条件下输出被动驱动力动态范围、输出被动驱动力随结构参数的变化关系.综合考虑体积、输出被动驱动力大小及其动态范围基础上提出了阻尼器的最优设计方法,并给出了设计程序.利用该设计方法设计了应用于被动力反馈装置的驱动器,加工了原型并进行了测试,测试结果验证了设计方法的有效性.
驱动器; 力觉交互; 优化设计; 磁流变液
0 引言
随着虚拟现实技术的发展,力觉反馈设备已被广泛应用于虚拟装配、遥操作、虚拟手术、康复医疗等各个领域,力觉驱动器作为力觉反馈设备中的关键因素,决定着力觉交互的品质,如虚拟操作的沉浸感、真实感,同时也影响操作者的安全性.目前的力觉交互设备大多是主动型的,如美国Immersion公司的CyberGrasp[1]、SenseAble公司的PHANToM手臂系列[2]、Rutgers大学研究开发的Rutgers Master II-ND[3]等,主要由司服电机、压缩空气[4]或电磁场[5]等主动驱动器驱动,存在稳定性差、体积大、输出力范围小、保真性差等缺点,且一旦出现故障,易给操作者造成伤害.被动力觉交互设备是能量耗散的,本身具备安全稳定的优点,因此基于制动器[6]、人工肌肉[7]等被动驱动器的力觉交互设备经常被采用,但这些设备也存在一些缺陷,基于制动器的力觉再现设备完全依赖于机械接触易造成系统振动,基于气动人工肌肉的交互设备因响应速度较慢限制了其应用范围.
磁流变液是一种新兴的液体智能材料,在磁场作用下毫秒级时间内能连续、可逆地由牛顿流体状态转变为类似固体状态[8],基于磁流变液被动力觉交互设备[9-11]通过液体传力,稳定性更高,且响应速度快,已越来越受到人们的关注.对于给定参数的磁流变液阻尼器,可通过理论分析或实验的方法建立其动力学模型,实现对其有效的控制,但因其模型的高度非线性和复杂性并涉及到多个参数,如何利用其模型设计出符合要求的磁流变液阻尼器是亟待解决的关键问题之一,使其在力觉反馈设备中的应用很难得到推广.
本文以直动式磁流变液阻尼器为例,在其动力学模型的基础上,提出了一种无因次优化设计方法.首先介绍直动式磁流变液阻尼器的结构及其动力学模型,接着详细讨论了阻尼器的无因次的设计方法,最后利用提出的设计方法设计出阻尼器原型,并进行了实验验证.
1 磁流变液阻尼器及其动力学模型
基于磁流变液的被动力觉阻尼器结构如图1所示,由一个类似于活塞和缸体的结构组成,活塞两端的连杆组成双出杆结构,增加了稳定性并且不需要考虑体积补偿.在活塞上绕有线圈,由直流电流源供电.在缸体中充满磁流变液体,连杆与缸体盖之间进行密封处理.
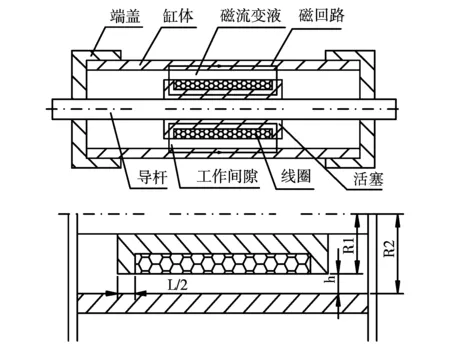
图1 基于磁流变液阻尼器结构图
没有电流施加到线圈时,磁流变液体呈现牛顿流体状态,活塞在缸体内移动基本上不受阻力.当有电流施加到线圈上时,线圈产生磁场的磁力线将垂直通过工作间隙(如图1)的磁流变液,磁流变液将产生磁流变效应,屈服应力增大,活塞在缸体内的移动是因剪切磁流变液而受阻力作用,随着电流的增加,磁流变液中的磁场未饱和时,磁流变液的屈服应力也不断增大,最终转变为类似固体的状态,活塞在缸体内的移动阻力将达到最大[12].这就是力觉产生的原理,而且其输出力的变化范围很大,由其实现的力觉交互装置将可以实现大范围的力觉反馈.
在对直动式磁流变液力觉阻尼器的模型研究中,西安通信学院的徐一兵利用平行板模型替代轴对称模型,建立了阻尼器的动力学模型[13]:
(1)
式中F为磁流变液阻尼器总的输出阻尼力,Ap为活塞端面的有效面积,h为工作间隙磁流变液径向宽度,w为工作间隙磁流变液平均周长,L为工作间隙磁流变液的有效长度,v0为活塞相对于缸体移动的速度,η为磁流变液的动力黏度,τ0为磁流变液的屈服应力.
可以控制的输出阻尼力和动态范围是衡量磁流变液阻尼器性能的两个综合指标,如图2所示,阻尼器的总输出力由两部分组成,即由磁流变液屈服应力τ0产生的阻尼力Fτ和不可控阻尼力Fuc,其中不可控阻尼力包括动力黏度产生的阻尼力Fη和摩擦力Ff,机械加工完成并选择好密封元件后,摩擦力基本上是一个固定值,可通过实验获得,这里忽略机械摩擦力Ff,动态范围D为总的输出阻尼力与黏性阻尼力的比值
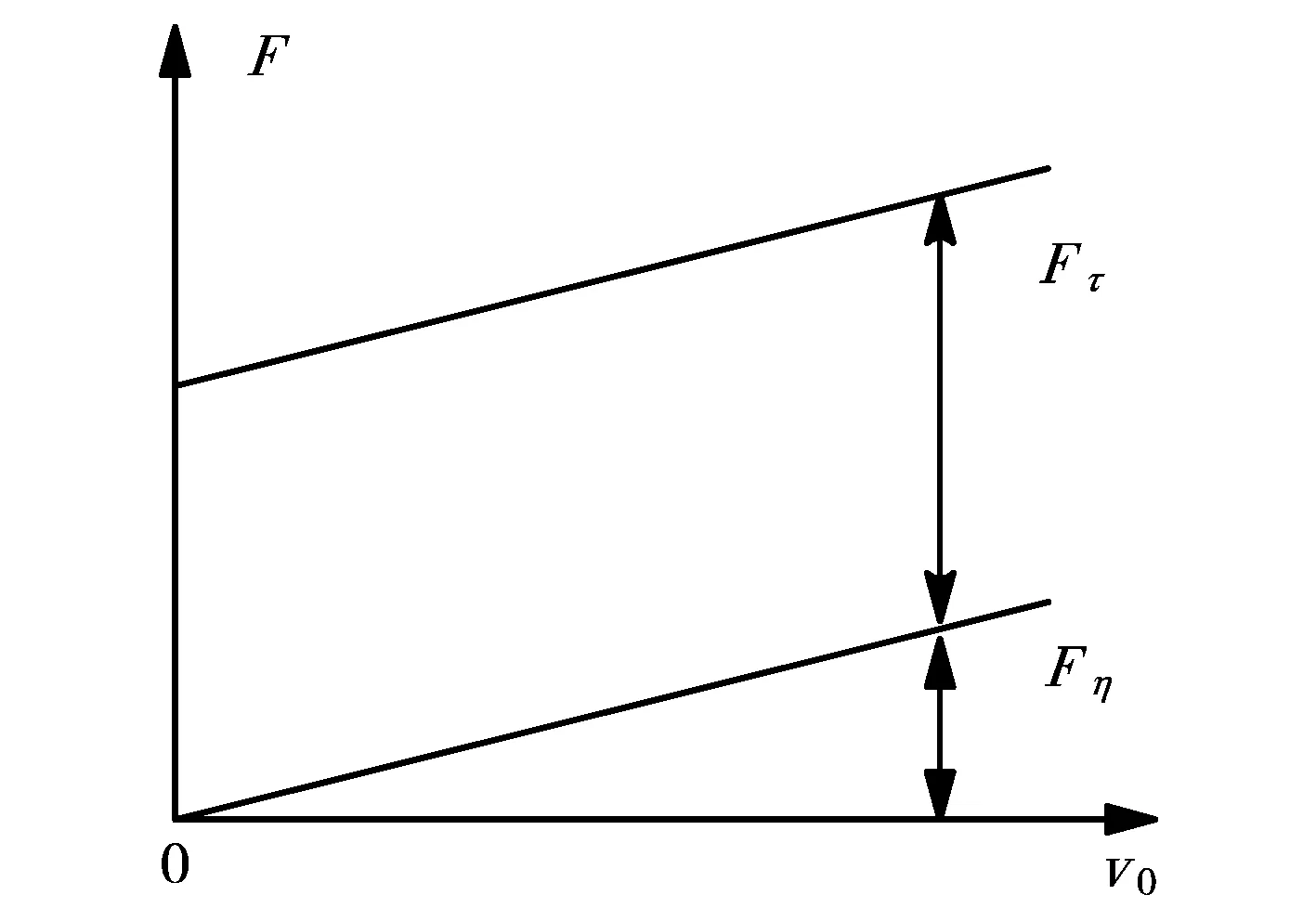
图2 阻尼器输出力组成
(2)
根据式(1),Fη、Fτ分别定义为
(3)
(4)
介于[2.07,3.07]之间.
从图2中可以看出,在输出阻尼力组成中,阻尼力Fτ是有益且可控的,而黏性阻尼力Fη是非有益的,因此Fτ越大、Fη越小,阻尼器的性能越好.式(4)的Fτ受以下参数影响:阻尼器的结构参数、磁流变液的特性及活塞相对于缸体的速度,这些参数同时影响着黏性阻尼力的大小,以结构参数h为例,Fτ与h成反比,h越小,Fτ越大,而h减小引起Fη增大,使阻尼器动态范围变小,可以看出,影响阻尼器两种性质输出力的参数存在着耦合作用,因此利用该模型设计阻尼器存在较大的困难,为此提出了一种最优化设计方法,可根据场合不同,设计符合使用要求的阻尼器.
2 阻尼器的优化设计方法
2.1 阻尼器的无因次设计分析
定义无因次速度V、无因次压力梯度P和无因次屈服应力Z分别为:
(5)
式中,Q(Apv0)为磁流变液体积流量.
阻尼器的输出力F=ΔPAp,其中ΔP为活塞两端压差,压差ΔP=-L(dp/dx),其中-dp/dx为工作间隙磁流变径向压力梯度,负号表示压差与速度方向相反,则
F=-L(dp/dx)Ap
(6)
将式(5)、(6)带入式(1)得压力梯度的无因次方程
(7)
当无因次屈服应力Z为零时,磁流变液呈现牛顿流体特性,由式(7)可得到牛顿流体的粘滞无因次压力梯度,定义无因次动态范围φD为总的无因次压力梯度与粘滞无因次压力梯度的比
(8)

将式(5)、(7)及φc和φr代入式(6)得到由无因次参数φc和φr表示的无因次阻尼力φF
(9)
这样,磁流变液阻尼器阻尼力可以表达成
F=(6πηv0L)φF
(10)
从式(10)可以看出,阻尼力F与间隙长度L成正比,当无因次宾汉值φc为零时,式(9)简化阻尼力的方程为牛顿流体的情况.
无因次宾汉值φc为常数时无因次动态范围φD与无因次几何参数φr之间关系如图3(a)所示,无因次动态范围φD随着无因次几何参数φr增大而减小,因此减小的活塞半径R1可获得较大的无因次动态范围φD.对于给定的无因次几何结构参数φr,当无因次宾汉值φc增大时,无因次动态范围φD也随着增大,当屈服应力τ0增大时,无因次宾汉值φc增大,所以可以通过选择屈服应力较大的磁流变液增加阻尼器输出阻尼力范围.此外,间隙深度h对无因次参数φc和φr都有很大的影响,随着间隙宽度h增大,无因次宾汉值φc增大,无因次几何参数φr减小,从而使无因次动态范围φD增大,所以可以通过选择合适的h设计无因次动态范围φD,但h增大时需要吸收更大的磁场能量,必须增大线圈匝数或增加线圈电流,这样易导致阻尼器体积的增加或能耗的急剧增大,所以h的值将受到限制.
当无因次宾汉值φc为常数时,无因次阻尼力φF和无因次几何参数φr之间的关系如图3(b)所示,无因次阻尼力φF随着几何参数φr增大而增大.对于给定的无因次几何结构参数φr,当无因次宾汉值φc增大时,无因次阻尼力φF也随着增大,这就意味着高屈服应力τ0、大的活塞半径R1和小的间隙深度h将增大阻尼力,另一方面,大的活塞半径R1和小的间隙深度h将减小无因次动态范围φD.
综上所述,各无因次参数之间存在着相互约束关系,因此必须根据实际的使用场合和使用要求综合考虑各种因素,以求得最优的参数组合.
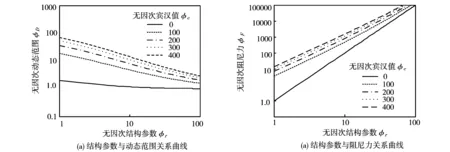
图3 无因次参数之间关系
2.2 磁流变液阻尼器参数设计
用式(8)、(9)、(10)无因次方程,可以建立磁流变液阻尼器有效的设计程序,满足各种设计要求.一般情况下,无因次动态范围φD和最大阻尼力F是磁流变液阻尼器最重要的设计参数,为了满足所需的动态范围和最大阻尼力,可按以下设计步骤设计相关:
1)按使用场合或设计要求指定无因次动态范围φD(=F/Fη);
2)按使用场合或设计要求指定一定活塞速度v0最大输出力F;
3)测出所使用的磁流变液的宾汉特性值(τ0,η);
4)将步骤3)中的τ0和η计算无因次宾汉值φc(τ0h/ηv0),考虑选择合适的间隙深度h;
5)将步骤4)中的h计算几何参数φr,满足步骤1)中无因次动态范围φD的需要;
6)将步骤3)中的η和步骤2)中v0速度下F代入式(10)计算环形间隙的有效长度L.
3 阻尼器设计实例及实验验证
根据某力反馈装置的需要设计磁流变液阻尼器,要求输出力动态范围20,速度为2 m/s时的最大输出力为10 N,活塞半径为10 mm,根据设计要求,选择选择美国LORD公司生产的MRF-140CG型磁流变液,其参数如表1所示.

表1 MRF-140CG型磁流变液参数
利用上述设计方法和设计步骤设计的磁流变液阻尼器参数如表2所示,设计出的磁流变液阻尼器的原型如图4所示.

图4 磁流变液阻尼器实物图
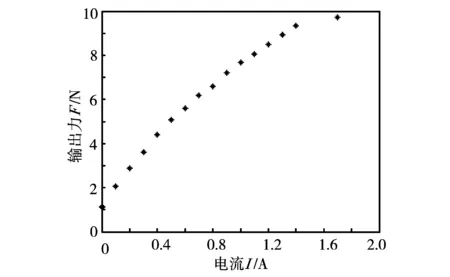
图5 磁流变液阻尼器测试结果

表2 磁流变液阻尼器设计参数
在保持输出轴(与活塞一体)相对与缸体以0.2 m/s移动的情况下,给阻尼器线圈施加0~2 A的电流,测量出输出轴所受的阻力,输出阻力与输入电流的对应关系如图5所示,从图5中可以看出,所设计的力反馈阻尼器最大输出值为10 N左右,实验中测得阻尼器的非有益阻尼力为1 N,其中的机械摩擦力为0.5 N,黏性阻尼力为0.5 N,忽略机械摩擦力,可计算出磁流变液阻尼器的动态范围约为19,基本上达到使用要求.
4 结论
磁流变液作为一种新型的智能材料,具有卓越的性能,非常适用于开发被动力觉反馈设备,尤其是可实现物体柔顺性特征的再现,但基于磁流变液阻尼器的设计方法较为繁琐.本文所提出的磁流变液阻尼器的无因次设计方法具有简单、步骤清楚、容易实现等优点,可根据不同的使用场合设计出符合要求的阻尼器,并被实验证实行之有效. 该方法为基于磁流变液阻尼器的设计提供了参考,使磁流变液在被动力觉反馈技术中的应用得到推广.
[1]Zhou Z H,Wan H G,Gao S M,et al. A realistic force rendering algorithm for CyberGrasp:Proceedings of the Ninth International Conference on Computer Aided Design and Computer Graphics[R]. Hong Kong,China,2005:409-414.
[2]Yang X L,Kim Y K,Wu Q A,et al. Hand function training in haptic virtual environment:Proceedings of the 2006 IEEE International Conference on Mechatronics and Automation[R]. Luoyang,China,2006:395-399.
[3]Heuser A,Kourtev H,Winter S,et al. Telerehabilitation using the Rutgers Master II Glove following carpal tunnel release surgery:Proof-of-concept[J]. IEEE Transactions on Neural Systems and Rehabilitation Engineering,2007,15(1):43-49.
[4]Chen Y,Zhang J F,Yang C J,et al. Design and hybrid control of the pneumatic force-feedback systems for Arm-Exosketeton by using on/off valve[J]. Mechatronics,2007,17(6):325-335.
[5]Cho S K,Jin H Z,Lee J M,et al. Teleoperation of a Mobile Robot Using a Force-Reflection Joystick With Sensing Mechanism of Rotating Magnetic Field[J]. IEEE-ASME Transactions on Mechatronics,2010,15(1):17-26.
[6]Tenzer Y,Davies B L,Baena F R Y. Programmable differential brake for passive haptics[J]. Robotics and Autonomous Systems,2010,58(3):249-255.
[7]孙中圣,包钢,李小宁. 基于气动人工肌肉力反馈数据手套的柔性物体力觉再现[J]. 南京理工大学学报:自然科学版,2009,36(6):713-716.
[8]Jolly Mark R,Bender Jonathan W,Carlson J D. Properties and applications of commercial magnetorheological fluids[J]. Journal of Intelligent Material Systems and Structures,2000,10(1):5-13.
[9]Han Y M,Kang P S,Sung K G,et al. Force feedback control of a medical haptic master using an electrorheological fluid[J]. Journal of Intelligent Material Systems and Structures,2007,18(12):1149-1154.
[10]Winter S H,Bouzit M. Use of magnetorheological fluid in a force feedback glove[J]. IEEE Transactions on Neural Systems and Rehabilitation Engineering,2007,15(1):2-8.
[11]Bicchi A,Raugi M,Rizzo R,et al. Analysis and design of an electromagnetic system for the characterization of magneto-rheological fluids for haptic interfaces[J]. IEEE Transactions on Magnetics,2005,41(5):1876-1879.
[12]崔建伟,王爱民. 一种新型的被动力再现装[J]. 工业仪表与自动化装置,2007(6):42-45.
[13]徐一兵,刘超群. 磁流变驱动器的建模及其设计原则[J].西安通信学院学报,2004,3(6):5-8.
[14]张进秋,张建,孔亚男,等. 磁流变液及其应用研究综述[J]. 装甲兵工程学院学报,2010,24(2):1-6.
[责任编辑:蒋海龙]
OptimizationDesignMethodforMagneto-rheologicalFluidbasedHapticActuator
DAI Jin-qiao1,2,4,YU A-long1,2,WANG Ai-ming3,4,WEI Wei1
(1.School of Physical and Electronic and Electrical Engineering,Huaiyin Normal University,Huaian Jiangsu 223300,China)
(2.Jiangsu Province Key Construction Laboratory of Modern Measurement Technology and Intelligent System,Nanjing Jiangsu 210096,China)
(3.School of Instrument Science and Engineering,Southeast University,Nanjing Jiangsu 210096,China)
(4.Remote Measurement and Control Key Lab of Jiangsu Province,Nanjing Jiangsu 210096,China)
An optimization design method for magneto-rheological fluid based haptic actuator was presented for force interaction. The structure,principle and dynamics model were introduced. Non-dimensional model was set up with the relevant parameters in the dynamics model replaced by the Non-dimensional parameters. The relationships between the structure parameters and the output passive driving force,its dynamic range were analyzed when the Bingham value is a constant. An optimum design method for the haptic actuator was presented on base of synthetically considering the volume,output force and its dynamic range and the design program was given. A haptic actuator was designed according the method and the prototype was manufactured. Finally,the actuator was test and the effectiveness of the design method was verified by the results.
actuator; haptic interaction; optimization design; magneto-rheological fluid
2015-05-22
江苏省科技支撑计划项目(BE2012740); 江苏省高等学校大学生实践创新训练计划项目(201310323059X); 淮安市科技支撑计划项目(HASZ2013006; HAG2014041); 江苏省远程测控技术重点实验室开放基金项目
戴金桥(1973-),男,江苏涟水人,讲师,博士,研究方向为力触觉交互技术、测控技术与智能系统. E-mail:djq@hytc.edu.cn
TP24
:A
:1671-6876(2015)03-0220-05
猜你喜欢
郑州大学学报(工学版)(2023年6期)2023-10-26 08:35:28
设备管理与维修(2022年21期)2022-12-28 07:33:54
疯狂英语·初中天地(2022年9期)2022-08-29 13:58:34
轻工机械(2021年1期)2021-03-05 08:22:12
北京理工大学学报(2020年11期)2020-12-15 04:55:50
工业安全与环保(2020年10期)2020-11-05 05:51:04
中国制笔(2020年2期)2020-07-03 09:20:52
四川建筑(2018年4期)2018-09-14 00:16:52
科技创新与应用(2017年10期)2017-04-26 20:05:22
中小企业管理与科技·中旬刊(2016年3期)2016-04-22 10:05:38