一种矿用机械的行走直线功能改进方法
2015-07-18 11:24郭太清韩美香蔡新盛
新技术新工艺 2015年10期
郭太清,韩美香,蔡新盛,张 敏,解 康,畅 宁
(山西北方机械制造有限责任公司,山西 太原 030009)
一种矿用机械的行走直线功能改进方法
郭太清,韩美香,蔡新盛,张 敏,解 康,畅 宁
(山西北方机械制造有限责任公司,山西 太原 030009)
履带式行走底盘的结构是在底盘的行走架上安装有左、右2条履带的行走装置,其行走功能的实现方法是在左、右2条履带上各装1套行走驱动机构,每条履带的行走驱动力是由各自结构中安装的马达(马达由来自泵的压力油驱动)的输出轴旋转而形成的。单泵供油使2个马达同时工作时,马达会因受到各自所驱动的阻力的不同,而呈现出承受阻力小的马达运转,承受阻力大的马达无法同步运转或不转的情况,这就形成机械设备不能直线行走的问题。针对这种情况,进行了分析研究,最终采用负载敏感多路阀解决了这一问题。
履带;行走;直线;换向阀
根据煤矿生产建设应用市场的需求,笔者开展了一种矿用机械的研制工作。该矿用机械的行走工况是煤矿等的巷道,巷道的最窄宽度是3.5 m,道路是具有石块或煤块的土质路面。由于煤矿的巷道场地所限,所以对这种矿用机械的行走直线功能要求较高。该矿用机械必须能够在3.5 m宽的巷道内实现稳定行驶并能转弯。
1 矿用机械的行走装置结构
工程机械的行走装置有多种形式,常见的主要有履带式、轮式和步履式等3种,其主要功能是支承和移动。而履带式行走装置是最常应用的一种形式,其突出的优点是牵引力大、接地比压小、附着系数大、越野性能及稳定性好、爬坡能力强、转弯半径小和机动灵活。基于上述优点,履带式行走装置更适合在煤矿等的巷道内运行。
履带式行走装置的结构是在底盘的行走架上安装有左、右2条履带,而整个履带式行走装置是由2组“四轮一带”(即引导轮、支重轮、托链轮、驱动轮和履带)、张紧装置、行走机构和1个行走架组成。其中,行走机构包括行走马达、行走减速机装置和行走制动阀。行走马达由来自泵的压力油驱动旋转,并将扭矩传递到行走减速装置。行走减速装置为多级行星齿轮减速结构,作用是降低行走马达的转速,增大驱动扭矩,使驱动轮和履带转动[1],从而驱动整车的行走运动。
履带式行走装置机械行走时,驱动轮在驱动力矩的作用下产生一个拉力,企图把履带从支重轮下拉出。由于支重轮下的履带与地面间有足够的附着力,阻止履带的拉出,迫使整机克服阻力向前移动,使驱动轮卷动履带,导向轮再把履带铺设到地面上,从而使整机沿着履带轨道向前持续运行。整机转向时,通过对安装在2条履带上、由液压泵供油的行走马达的油路控制,可以实现转向或就地转弯,以适应整机在各种地面上的转向。
2 初始设计的行走操作阀原理
煤矿用机械的履带式行走装置所应用的具体工况要求其具有防爆功能,所以在液压系统设计时,不能选用电磁换向阀,且由于工作流量不很大,可以直接操作,所以也不必增加先导操作等。手动换向阀是依靠手动杠杆的作用力驱动阀芯运动来实现油路通断或切换的方向控制阀。由于手动换向阀操作简便,工作可靠,又能使用在没有电力的场合,因而在行走机械液压系统中得到了广泛的应用[2]。本文选择了四川长江液压有限责任公司的两联手动Z系列多路换向阀。其液压原理图如图1所示。
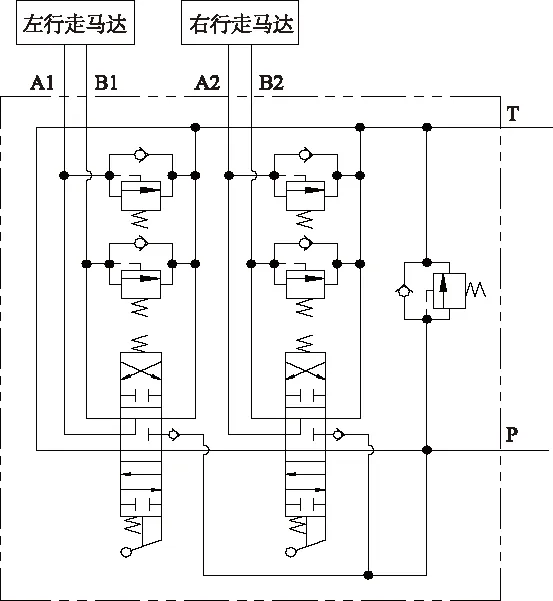
图1 Z系列多路换向阀原理图
Z系列多路换向阀是由多个换向阀和安全阀及各种附加阀组合而成的片式组合阀,根据工作机构需要,可组合为10联以内的多路阀组。它具有工作压力高、结构紧凑、安全阀性能好、可靠性高和通用性好等特点。它主要用于挖掘机、装载机、起重机械和矿山机械等的液压系统中,能够实现多个执行机构的集中控制。
3 问题现象及原因分析
产品试制完成后,进行行走试验时发现,其行走时很难做直线运动,且操作行走操纵阀后,整车是左右晃动着前进,晃动的幅度很大、很猛,不适应在坑道中自行运动。针对上述问题,通过认真研究和分析后发现,由于原系统是单泵供油,所以普通手动换向阀换向后,若左右行走马达同时供油行走,受阻力大小的影响就会出现单边行走的状况。
4 行走直线功能改进方法
在液压阀中有分流—集流阀,可以使2个或2个以上的执行元件在承受不同负载时,仍能获得相等(或成一定比例)的流量,从而实现执行元件的同步运动,故也称为同步阀[3]。此阀可以保证2条履带的直线运行功能,但该矿用机械还有转弯、回转等功能要求,即2条履带既有行走直线时需同步的要求,又有转弯等时需不同步的要求,所以分流—集流阀还不适合该矿用机械的底盘行走装置的要求。
有一种负载传感控制系统是采用压力补偿阀,使多路阀前、后(上、下游)的压差ΔP为定值。根据节流孔流量公式,即:

(1)
式中,K是流量系数,与油的容重有关;A是节流孔面积(即多路阀芯的开度);ΔP是节流孔前、后压差(即多路阀芯前、后压差)。
由式1可知,若保持压差ΔP不变,则流经节流孔(多路阀芯的节流边)的流量只与过流面积成正比。这就是说,实现各联节流阀前、后压差均保持在设定的相等值,进而保证多路阀各联通流量只与阀芯位移相关,而与各联负载无关[4]。在履带式底盘的行走过程中,即使左、右履带的阻力变化不定,只要使阀芯两端压差ΔP为定值,那么,流进2个液压马达的流量也不改变,因而底盘上2条履带的转速也保持不变。即负载传感控制可保证2个马达的输出轴的转速不受负载变化的影响,两马达互不干扰;因此负载传感系统只需采用单泵并联回路,即可实现各联机构的动作要求。
丹福斯的负载敏感多路阀是一种串联定差减压阀的负载敏感手动换向阀。这种配置串联定差减压阀的负载敏感系统,其基本优点是所控制负载速度只与输入信号有关,不受负载压力变化的影响,各联之间互不干扰,速度只与各联输入信号相关;因此,该阀用来操作单泵供油控制2条履带行走的液压系统装置很适合。但这种负载敏感多路阀的中位都是O型的封闭结构,没有中位回油通道,在各执行机构都不动作时不能形成卸荷状态,这样就会增加无用功的损耗,增加系统发热。如何将没有回油通道的负载敏感阀组改变成有回油通道的阀组,就是解决问题的关键。
通过认真分析和研究这种负载敏感阀组的结构和原理图,最终确定了采用多加1联负载敏感阀,用多加的这一联阀的一端工作位作为通道使用,形成回油通道,使得在行走机构不工作时,系统是卸荷状态,这样可以减小功率损失和减少系统发热;同时,该回油通道还可以当作过桥通道进行与其他阀组的连接,形成动力油源的传送。其原理图如图2所示。

图2 负载敏感阀原理图
具体实施方法是将负载敏感阀组中的一联的操纵手柄,操纵为固定在某一端的工作状态。而固定这一手柄在某一工作位的方法是通过将一支杆的一端固定在阀组上,另一端将这一联的手柄操作杆支承为一种工作状态,将对应输出压力油的工作油口接至回油处,从而形成了卸荷回路。此卸荷回路也可作为过桥通道向其他阀组提供油源,便于和其他类型的阀组连接。该联的负载敏感阀是作为通道功能使用;而当其余联的负载敏感阀工作时,此联作为通道的负载敏感阀不影响其正常工作,只是分流一些油。工作时也可将该支杆旋开,即可不产生分流的作用。实际将负载敏感阀的某一联操纵手柄固定在一个工作位的实施情况如图3所示。

图3 某一联操纵手柄固定在一个工作位的实施情况
该矿用机械的履带式行走装置的液压系统中按上述方法更换为负载敏感阀组后进行试验, 其行走直线运动很稳,且转弯行驶也很灵活,达到了该产品在单泵供油的情况下其行走动作适应煤矿巷道环境的要求。
5 结语
负载敏感阀在液压系统中的应用,主要是能够实现与负载无关地控制执行元件的流量,所以阀的流量仅与控制信号成比例,而与负载大小无关;因此,采用该阀后,操纵行走控制阀的阀杆动作时,行走速度只与操作的阀芯开口大小有关,而不受单边履带阻力大小的影响,这样可以保证单泵供油的履带式行走底盘的行走直线性和转弯功能的要求。该方法适合于仅由单泵供油的情况下,通过压力补偿同时控制多个具有不同负载压力的执行器,可以仅通过改变各操作阀的操作量来调整各执行器的速度,使控制速度不随负载压力而变化,避免低负载过快、高负载停止的现象。在车辆和工程机械中采用多执行器负载敏感,可以大幅度提高其操作性能[5]。
[1] 陈国俊. 液压挖掘机[M].武汉:华中科技大学出版社,2011.
[2] 范存德. 液压技术手册[M].沈阳:辽宁科学技术出版社,2004.
[3] 雷天觉. 液压工程手册[M].北京:机械工业出版社,1990.
[4] 葛磊,赵虎,权龙. 基于SimulationX的多路阀负载补偿阀建模分析[J].液压与气动,2013(10):11-14.
[5] 顾临怡,谢英俊. 多执行器负载敏感系统的分流控制发展综述[J].机床与液压,2001(3):3-6.
责任编辑郑练
南京欲建国际机床产业园区
从南京新工集团主办、机床集团承办的“现代机床制造业发展及市场论坛”上获悉,南京机床产业正加大与全球顶尖企业的深度合作,未来南京还有计划建立国际机床产业园区。上世纪70~80年代,南京的机床行业在全国领先,但是90年代后,南京的机床行业渐渐落后,相比沈阳、大连、重庆的机床产业有较大差距,相比德国西门子、日本法那科等全球顶尖企业则差距更大。为了缩小南京机床产业与世界先进机床产业的差距,南京机床产业加大了与德国西门子、日本法那科等全球顶尖企业的深度合作,未来3年,南京机床集团将加快技术引入和推进全球市场化营销,实现南京机床产业的升级换代,未来还有计划在南京国际机床产业园,实现集高端机床生产和销售于一体的产业化基地。
——摘自中国机床网
AMethodofMiningMachineryWalkStraightLineFunctionImprovement
GUO Taiqing, HAN Meixiang, CAI Xinsheng, ZHANG Min, XIE Kang, CHANG Ning
(Shanxi North Machinery Manufacturing Limited Liability Company, Taiyuan 030009, China)
Crawler walking chassis structure is setting up two crawler walking device on the chassis of walking, the walking function implementation of the method is: to set driving mechanism in each of two tracks, a driving force of each crawler walking by their structure is installed in the motor (motor driven by pressure from the pump oil) of the output shaft rotation. Single pump oil make two motors at work at the same time, the motor will be driven by their own resistance to the present. Under the small resistance of the motor running, the motor in the resistance can't work under synchronous operation or not, and it makes mechanical equipment can't walk straight. For this kind of situation, we have carried on the analysis of research, finally use the load sensitive multi-way valve solve this problem.
track, walk, a straight line, directional control valve
TH 15
:B
郭太清(1961-),男,工程师,大专,主要从事工程机械的研发设计等方面的研究。
2015-02-09
猜你喜欢
南方电网技术(2022年8期)2022-09-30
中国农村水利水电(2022年8期)2022-08-28
南方电网技术(2022年2期)2022-03-24
化工管理(2020年6期)2020-01-15
电子制作(2016年19期)2016-08-24
液压与气动(2015年6期)2015-04-16
航运交易公报(2014年10期)2014-04-02
航运交易公报(2014年10期)2014-04-02
筑路机械与施工机械化(2014年2期)2014-03-01