绕线转子永磁电机启动过程准时间最优控制
2015-07-11 06:13张炳义阎德宝
电气传动 2015年9期
张炳义,阎德宝
(沈阳工业大学电气工程学院,辽宁沈阳110870)
目前大部分起重机的拖动电机是绕线式异步电动机,特点是启动特性好,转子可外串电阻来提高电机启动性能,其驱动系统普遍采用三相异步电动机和齿轮减速机配合使用。由于起重机的负荷变化大,正常运行时电机的负载率一般低于50%,异步电动机的效率和功率因数会随着负载率的降低而急剧下降,造成能源浪费。而采用永磁电机可以在很宽的负载变动范围内保持高效高功率因数,提高系统运行效率、简化传动链、降低养护成本。将绕线式异步电机和永磁同步电机的优点有机结合提出了绕线转子自启动永磁电机。
文献[1]采用有限元仿真的方法计算和分析了鼠笼转子永磁电机的启动特性;文献[2]利用Ansoft软件对异步启动永磁同步电机启动性能进行了仿真计算,总结了一套基于有限元的自永磁同步电动机启动性能的仿真计算方法;文献[3-5]提出并研究了绕线转子结构的自启动永磁电机,着重分析了电机磁路结构设计和稳态性能,并对其启动过程进行了分析;文献[6]介绍了IGBT门极驱动保护电路的分类,讨论了选用IGBT驱动器时的参考原则;文献[7]提出一种IGBT作斩波管的具有吸收保护作用的斩波回路拓扑结构,并对异步机转子斩波调阻调速系统整流回路的准动态过程进行了详细研究;文献[8]提出了一种转子IGBT斩波拓扑结构,有效地调节了转子电阻和保护斩波器;文献[9]对异步电机转子斩波调速系统的静态和动态性能进行了详细的分析,得出了转子外接电阻的计算方法和系统的动态数学模型。
本文针对自启动永磁电机启动过程电流大,转矩冲击明显的特点提出WR-PMM启动过程准时间最优控制系统的设计方案。系统采用转子IGBT 斩波调阻的控制策略,完成启动控制系统的硬件和软件设计,并搭建样机启动控制实验台,实现了样机启动过程中实时输出最大异步转矩的准时间最优控制策略。
1 准时间最优控制
准时间最优控制的目的是在电机启动阶段,通过控制转子外串等效电阻使启动过程中转矩保持恒定最大转矩Tmec-max,理想状态下使电机做匀加速运动。系统在恒定转矩Tmec-max的约束条件下实现了启动过程“最短时间控制”,或称“时间最优控制”。然而整个启动过程与理想快速启动过程还有差别,主要表现在WR-PMM 数学模型的建立和启动特性的研究上,所以将WR-PMM斩波调阻启动过程称为“准时间最优控制”过程。WR-PMM准时间最优控制过程目标曲线如图1所示。
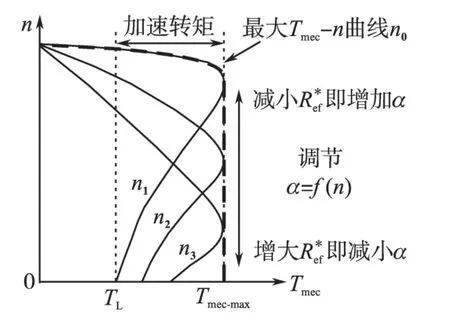
图1 准时间最优控制过程目标曲线Fig.1 Target curves of the quasi-time optimal control process
图1中,n1,n2,n3曲线为转子串不同电阻启动过程机械特性曲线,n0为准时机最优控制过程曲线。在WR-PMM定转子自身阻抗参数确定的情况下,最大异步转矩对应转速唯一且取决于转子外部回路等效电阻。因此如果能在电机启动过程中,将实际运行转速实时检测并作为转子外串电阻计算模型输入参量,电机即可沿着n0曲线近似恒转矩加速至同步速。
WR-PMM斩波控制过程主要在转子绕组整流后的直流侧进行,为了便于建立转子IGBT 斩波调阻控制准动态数学模型:首先将定子侧参数折算到转子侧并加入整流环节,得到转子直流侧等效电路模型;然后加入基于RCD缓冲电路的斩波控制环节可得到转子直流侧斩波调阻电路模型,经过整理可得出WR-PMM合成异步转矩Tmec的公式,进而可以找出每个转速点对应最大转矩的转子外串电阻;最后根据实时输出最大异步转矩的控制原则,推倒出斩波占空比与电机转速关系如下式所示:
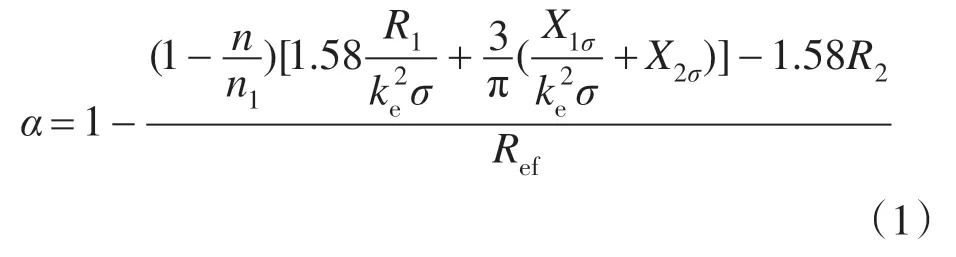
式中:R1,X1σ,R2,X2σ分别为定转子绕组电阻和漏抗;ke为有效匝数折算系数;σ为电路形式转换系数。
根据上式控制方法,即可使WR-PMM 沿着图1中的最大异步转矩n0曲线从零速近似匀加速至同步转速。
2 控制系统的设计
2.1 启动控制系统整体结构设计
根据WR-PMM 样机运行原理和控制方法,搭建斩波调阻启动控制系统。系统中各主要器件的选择应同时兼顾样机主要性能参数和整个控制系统性价比等因素。除WR-PMM 样机以外,控制系统主要包括:编码器、转子外串电阻器、转子三相整流模块、主控芯片及其外围电路、IGBT斩波器等。系统硬件原理图如图2所示。
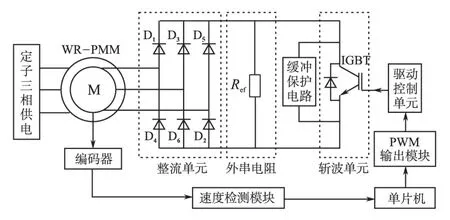
图2 系统硬件原理图Fig.2 Principle diagram of the system hardware
2.2 外串电阻选择
当转速为零时,斩波调阻控制方案中所需外串电阻达最大值,其阻值为

外串电阻只在启动过程中工作,其功率等级的选择要综合考虑启动过程功率损耗。启动过程不同转速时,外串电阻消耗功率Pef为

此功率是关于转差率s的非线性函数。电机每完成1 次启动,外串电阻即存在一个时段的功率消耗,进入同步速之后,外串电阻停止工作,将式(3)对转差率进行积分,可得每次启动过程中外串电阻的平均损耗为

2.3 主控芯片的选用
主控芯片采用dsPIC30F 系列高性能16 位数字信号控制器。该芯片具有的电机控制PWM(MCPWM)模块简化了产生多种同步脉宽调制输出的任务。同时,该芯片还带有QEI编码器接口,用于检测旋转运动系统的位置和速度。对于增量式光电编码器,通常有A,B,Z信号,其中A/B脉冲信号的周期和相位表征转速和转向,Z 信号为索引信号,每转动1 周发1 个脉冲。通过此接口可检测WR-PMM 的实时转速,实现对启动控制系统IGBT斩波回路的转速闭环控制。
2.4 数据采集
WR-PMM启动过程中需根据实时转速进行PWM斩波调阻,因此转速的准确测量十分关键。编码器型号选:EH100/45。供电电压:DC 8~30 V。实时输出的脉冲信号经过调整电路,将脉冲电压等级降至5 V,从而可以由CPU的QEA/QEB管脚直接检测接收,通过对编码器A/B脉冲信号在固定时间内的电平跳变计数,计算实时角速度和转向。
为了避免脉冲电平干扰带来的转速计算误差,采用了CPU 自带的数字滤波功能,根据电机最大转速nmax=1 500 r/min 和编码器脉冲数PENC= 1 024脉冲/r,得到最小脉冲持续的时间:

进而由下式确定滤波器分频比fdiv,这里取16。

式中:M 为时钟晶振,取4 MHz;dFIT为滤波脉冲宽度。
根据上述分析,在转子外接电阻Ref确定的情况下,导通占空比可以根据式(1)进行计算。
3 WR-PMM启动控制实验
控制部分主要器件和启动控制过程所需参数如表1所示。系统采用示波记录仪采集存储启动过程中转矩转速和电量瞬态数据。
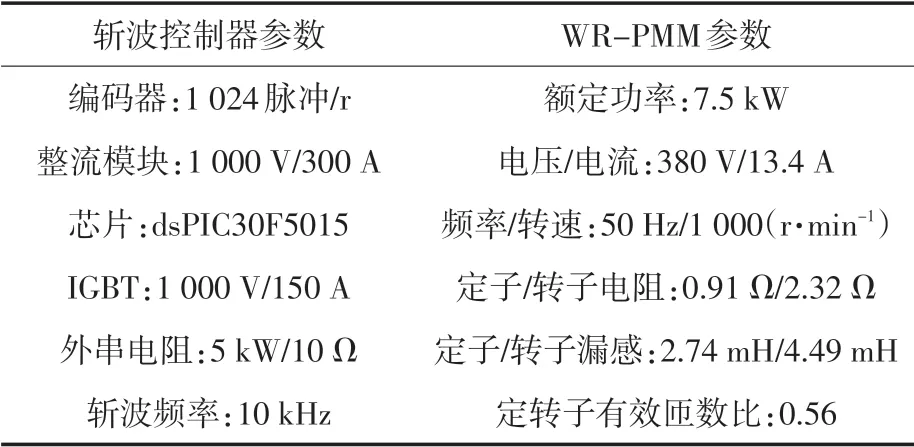
表1 控制电路与电机主要参数Tab.1 Main parameters of control circuit and WR-PMM
3.1 WR-PMM斩波启动实验分析
根据表1 中所示的电机参数,对7.5 kW 绕线转子永磁电机样机进行实验,在没有采用斩波调阻启动方法的情况下,即仅将WR-PMM 转子绕组短路时,最大启动转矩仅为50 N·m。采用IGBT 斩波调阻启动时,样机带不同负载启动时的转速变化情况如图3所示。
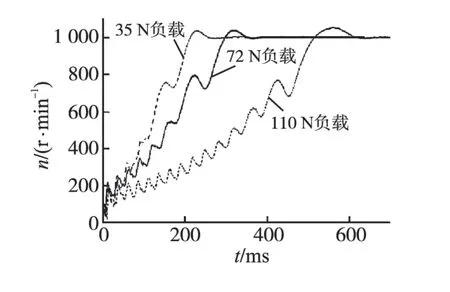
图3 WR-PMM转子斩波调阻启动时转速变化规律Fig.3 Speed changes of rotor resistance chopper control of WR-PMM
实验结果表明,采用斩波启动控制时,最大启动转矩达到110 N·m,随着负载转矩的提高,启动时间逐渐延长,但都能保证牵入同步。
斩波调阻启动过程中,IGBT在接收到启动信号进入斩波状态,斩波占空比随电机转速的不断提高而变化,转子整流回路干路电流如图4所示。从图4的电流包络线可以看出,电机收到启动信号后,转子整流侧电流迅速升至最大值,近乎沿着最大电流包络线启动,此后随着电机转速接近同步速,电流逐渐减小,直至牵入同步后转子电流消失,电机启动过程近似准时间最优控制。
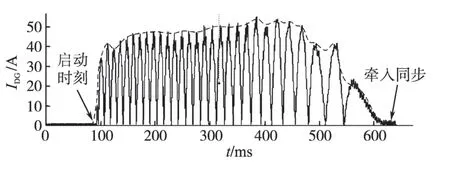
图4 转子整流回路干路电流(110 N·m)Fig.4 The total current of rotor rectifier circuit(110 N·m)
3.2 WR-PMM与鼠笼永磁电机对比分析
WRSL-PMSM作为自启动永磁电机的一种,其稳态性能与鼠笼转子永磁电机基本一致,都有较好的效率和功率因数指标。但是,在启动性能方面,WR-PMM具有转子电阻可调的优点,在提高启动转矩、制启动电流和改善牵入性能方面优势明显。
选取功率、转速和机座号等完全相同的WR-PMM与鼠笼转子永磁电机做对比。在相同的电源和负载条件下,对比两种电机的启动特性。WR-PMM(额定负载72 N·m)和鼠笼转子永磁电机(最大负载45 N·m)启动电流有效值对比如图5 所示。实验结果表明,WR-PMM 采用斩波调阻法可带额定72 N·m 负载启动,而鼠笼永磁电机最大带载能力仅为45 N·m。通过数据处理与折算,可得鼠笼转子永磁电机的启动电流冲击约为额定电流的8.5 倍,而采用斩波调阻启动方法的WR-PMM启动电流冲击仅为6.8倍。
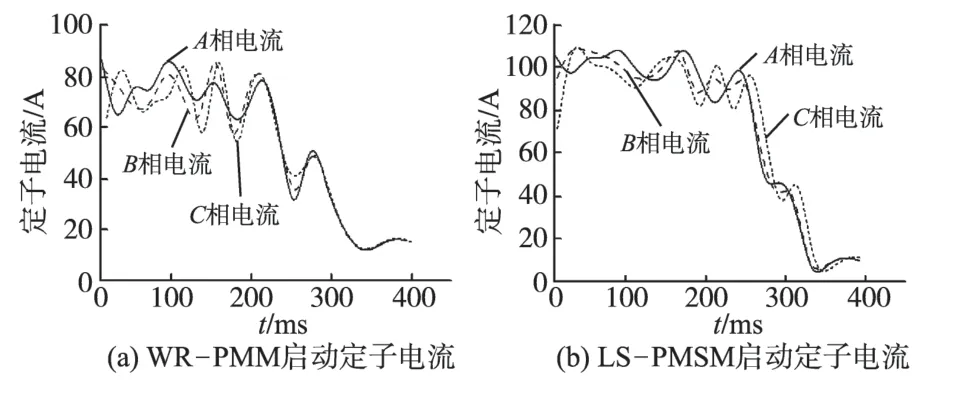
图5 WR-PMM和鼠笼转子永磁电机启动定子电流Fig.5 Stator starting current of WR-PMM and LS-PMSM
两种电机及其启动方法下转矩和转速变化过程如图6所示。
从图6a 可知,WR-PMM 采用斩波调阻法带额定72 N·m 负载与鼠笼永磁电机带45 N·m 负载启动过程相比,前者转矩冲击更小、合成异步转矩更大。而这也直接体现在图6b 所示的转速变化过程中,可以看出在WR-PMM 所带负载为鼠笼永磁电机1.6 倍的情况下,启动时间仅为鼠笼永磁电机的1/2,WR-PMM 更快进入同步转速,实现自启动永磁同步电动机启动过程的准时间最优控制。
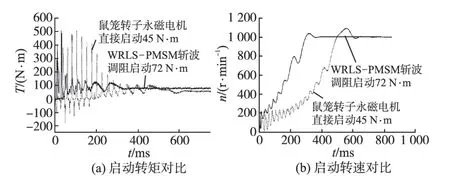
图6 启动转矩和转速对比Fig.6 Contrast of starting torque and speed
4 结论
本文提出绕线转子永磁电机启动过程准时间最优控制方法。通过WR-PMM转子斩波调阻控制策略,有效提高WR-PMM 启动能力。与不采用外串斩波调阻启动的WR-PMM 相比,最大启动转矩可提高80%以上,带载启动能力提高1倍以上,启动和牵入同步时间大幅度降低。相比鼠笼转子永磁电机,启动能力明显增强,启动时间大幅度减少,启动电流冲击可降低20%以上,电流抑制效果明显,实现了启动过程准时间最优控制。
[1]张健,罗应立,李和明,等.确定自启动永磁电机最小转矩的时步有限元仿真实验方法[J]. 中国电机工程学报,2011,31(21):102-109.
[2]刘秀君,李伟力,陈文彪.三相异步启动永磁同步电动机启动特性[J].电机与控制学报,2006,10(3):269-274.
[3]李超. 绕线转子自启动永磁电动机的设计及其性能分析[D].沈阳:沈阳工业大学,2012.
[4]Feng Guihong,Li Chao,Zhang Bingyi. Analysis on Starting Performance of a Novel Wound Rotor Line-start Permanent Magnet Synchronous Motor[C]//2011 International Conference on Electrical Machines and Systems. China:Beijing,2011:1969-2015.
[5]张杰.绕线转子自启动永磁同步电机启动过程的优化控制[D].沈阳:沈阳工业大学,2014.
[6]伍小杰,曹兴,夏帅,等.IGBT 驱动保护电路研究[J].电气传动,2010,40(10):13-17.
[7]沈天飞,陈伯时,龚幼民.异步电机转子IGBT 斩波调阻调速的准动态模型[J].电机与控制学报,2001,5(1):20-23,39.
[8]SHEN Tianfei,CHEN Boshi. Study on Rotor IGBT Chopper Control for Induction Motor Drive[J]. Journal of Shanghai University,2001,5(1):66-70.
[9]祁强,张广溢.异步电动机转子电阻斩波调速系统的特性分析与仿真研究[J].电机与控制学报,2005,9(1):86-89.
猜你喜欢
上海大中型电机(2021年2期)2021-07-21
数学年刊A辑(中文版)(2021年1期)2021-06-09
防爆电机(2020年6期)2020-12-14
数学物理学报(2019年3期)2019-07-23
测控技术(2018年12期)2018-11-25
四川冶金(2018年1期)2018-09-25
通信电源技术(2016年1期)2016-04-16
通信电源技术(2016年4期)2016-04-04
电机与控制应用(2015年3期)2015-03-01
中国塑料(2014年12期)2014-10-17