基于改进脉冲注入开关磁阻电机无位置传感器技术
2015-06-24 06:23邓智泉胡荣光
电工技术学报 2015年21期
邵 杰 邓智泉 胡荣光 王 骋
(1.南京航空航天大学自动化学院 南京 210016 2.曲阜师范大学工学院日照 276826)
0 引言
开关磁阻电机(Switched Reluctance Motor,SRM)因具有结构简单、坚固,容错能力强,运行效率高,机械特性硬,适于恶劣环境下运行等特点,目前已被广泛应用在电动汽车、航空航天、纺织工业、家用电器、伺服与调速系统等众多领域[1,2]。要保证SRM 可靠运行和高性能控制,就必须准确获取转子位置信息。传统的开关磁阻电机驱动系统中由于采用了转子位置传感器,严重影响了调速系统的可靠性,提高了成本,加大了安装调试的难度。因此SRM 无位置传感技术已成为开关磁阻电机及其相关课题研究的热点之一[3]。近20年来国内外学者在该领域做了大量研究,针对不同转速范围提出多种控制方案。其中主要包括调制解调法、高频脉冲注入法、相间互感检测法、磁链/电流法、电感模型法、反电动势估计法、基于智能控制以及观测器等多种位置估计算法[4-18]。
就SRM 静止起动和低速运行而言,为获取转子位置信息,目前主要的无位置传感器方法有相电流波形法、调制解调法和高频脉冲注入法等。高频脉冲注入方法无需外加激励源,直接利用功率变换器给非导通相注入高频检测脉冲。因此,基于高频注入脉冲的系列算法在SRM 的初始位置估计和低速运行中的应用具有一定优势。文献[8]通过向各相绕组注入诊断信号,根据响应电流计算各相绕组磁链,然后查询磁链特性数据表格进行静止时的转子位置估计。在此基础上,文献[9]利用响应电流峰值与转子位置角之间的解析关系求出转子的初始角位置,并对方法的鲁棒性进行分析。以上方法虽然可以实现电机的初始定位,但都要依赖电机的电磁关系,算法复杂,通用性差。文献[10]通过同时在电机两相以上的绕组注入一定幅值的测试脉冲,利用测试电流与转子位置的关系来检测转子初始位置和判断起动导通相,从而可实现任何位置时的无反转起动。文献[11]提出结合电感分区的高频脉冲注入方法,通过给各相注入短时脉冲,比较响应电流的大小可以确定初始导通相。该方法易于实现,不依赖电机具体的电磁关系,实用性较好。文献[12]提出了一种两相电流比较法的起动方法,这种方法无需预知电感信息,也无需任何建模和解算过程,易于实现。但该方法只能工作在轮流导通情况,且无法实现开通、关断角的调节。文献[13]提出了一种基于全周期电感分区策略与角度-电感模型相结合的无位置传感器方法,可实现电机静止和带初始转速时的精确初始定位和无反转起动。文献[14]提出一种基于电流斜率差值法的低速运行方法,消除了反电动势的影响,扩大了电机调速的范围。
从现有的国内外文献可看出,高频脉冲注入方法主要是应用在开关磁阻电机的初始位置估计,在电机低速运行时的研究较少。脉冲注入法不但可用于开关磁阻电机初始位置检测,在电机低速运行时也是一种比较可靠的位置检测算法。开关磁阻电机高速时,电流几乎在整个电气周期内都流过相绕组,因此仅存有很少的时间用于注入检测脉冲。当电机转速升高时,在一个电角度周期中注入的高频脉冲数目减少,导致该方法位置估计的准确度下降。因此,研究脉冲注入方法在开关磁阻电机低速运行时的转子位置估计,并扩大其应用范围,提高其高速时的检测准确度具有重要价值。
本文针对12/8分块转子开关磁阻电机,提出了一种改进的脉冲注入法,适用于开关磁阻电机的低速运行。该方法仅对电机一相绕组的非导通区间注入电压脉冲,采取在绕组非导通区间注入宽度逐渐增大的电压脉冲的方法。通过比较非导通区间响应电流峰值与所设电流阈值的大小,进行转子位置估计。因改进的脉冲注入法与电流梯度法位置估计原理一致,两种方法易于统一,有利于扩大提出的无位置方法的适用范围。实验结果表明,该方法能够实现准确的位置估计和无位置传感器运行。
1 改进型脉冲注入方法
1.1 分块转子开关磁阻电机的电磁特性
普通SRM 的定、转子为凸极齿槽结构,在高速运行时的风(油)阻较大,为了减小风(油)阻,可在转子中加填充物或增加转子槽楔,虽然降低风(油)阻的效果明显,但对工艺的要求较高。并且普通SRM 一般采用较长磁路结构,导致电机的铁心损耗较大,磁利用率较低。分块转子SRM 通过圆柱形转子结构减小了风(油)阻,采用的较短磁路减小了铁心损耗[19]。
图1为三相12/8 结构分块转子SRM 的截面图。其转子由若干个相同的呈扇形的转子铁心块嵌入在不导磁的转子套中组成,因此称为分块转子[20]。定义定子槽轴线与转子槽轴线之间的夹角为θ,当定子槽轴线与转子槽轴线重合时,定、转子间气隙最大,对应相的磁阻最大,此时为不对齐位置θ=0°。各相磁路的磁阻随转子位置的变化而改变,对电机绕组以一定的顺序通电,转子即可连续转动。电机的转矩、速度及转向的改变可通过控制励磁电流大小和通断时间实现。

图1 12/8 结构分块转子SRM 横截面示意图Fig.1 Cross section of 12/8 SRM with segmental rotors
1.2 改进型脉冲注入方法
转子分块开关磁阻电机功率变换器采用三相不对称半桥结构。通过控制不同桥臂上开关管的开通与关断,可同时或分时给各相注入一定频率的检测脉冲信号,而无需外加源等外围硬件电路。开关磁阻电机电压方程为

在静止和低速状态下,由于检测脉冲的响应电流幅值很小,运动电动势、电磁饱和效应、绕组等效电阻压降均可忽略。注入脉冲后响应电流可表示为)

式中:ipk为响应电流幅值;L(θ)为电机的电感值;U 为母线电压。由式(2)可知,当母线电压和检测脉冲频率给定时,非导通相的脉冲响应电流幅值与相电感呈反比关系。
开关磁阻电机各相绕组电感随转子位置的变化而周期性变化。当向检测相中注入一定脉宽的激励脉冲时,在绕组中会产生相应的响应电流,根据不同电感位置处响应电流峰值的变化特点可得到绕组的换相条件,从而判断换相时刻的到来。由于转子在电感下降至最小值的位置区域较大,响应电流峰值达到最大值的这一变化过程将十分明显。与普通的开关磁阻电机不同,本文所用12/8分块转子开关磁阻电机相电感从最大值下降到最小值位置区域较小,在非导通相注入高频脉冲信号后,响应电流峰值变化不明显,导致采用传统的脉冲注入方法效果变差。由式(2)可知,增大注入脉冲的宽度也可增大响应电流的幅值。但注入脉冲的宽度过大会产生负转矩,降低电机的效率。针对以上问题本文提出改进的脉冲注入方法,与传统的脉冲注入方法不同,改进的脉冲注入方法仅对电机一相绕组在非导通区间施加脉冲激励,并采用逐渐增大的电压脉冲。检测脉冲激励时间和检测脉冲注入频率的选取可参考文献[16]。在传统的脉冲注入方法的基础上,保持脉冲注入的频率不变,改变注入脉冲占空比,逐渐增加脉冲的宽度,通过DSP 软件来实现。提出的改进的脉冲注入方法原理如图2所示。
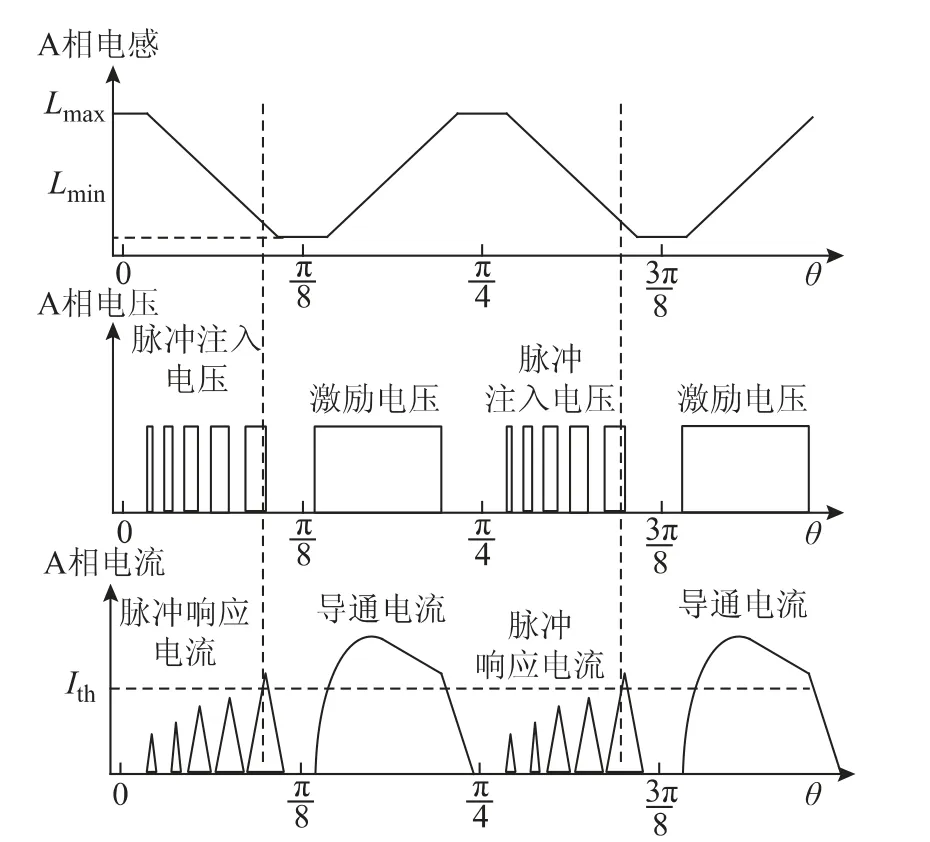
图2 脉冲注入与转子位置估计原理图Fig.2 Pulse injection and position estimation
为了提高位置估计的准确度,对非导通相的响应电流进行提取及滤波处理。因采用对非导通相电流进行比较的无位置方法,只提取注脉冲后响应电流的波形。由于脉冲频率较高和电流毛刺的存在,电流幅值的变化需要滤波整形,得到算法可利用的电流幅值包络线。数字滤波是通过一定的计算程序,对采集的数据进行某种处理,从而消除或削弱干扰和噪声的影响,提高测量的可靠性和准确度。本文采用最大值滤波的方法得到响应电流峰值的包络线,在DSP 中编程实现,可靠性高,并且不存在模拟滤波中的阻抗匹配、特性波动以及非一致性等问题。将响应电流峰值与事先所设置电流阈值进行比较,当响应电流峰值超过所设的阈值,发出转子位置脉冲,估计转子位置信息。以上转子位置估计方法的流程图如图3所示。电流阈值需要提前设定,随着母线电压的升高,脉冲电流的幅值也会相应升高,这样就需要改变设定的阈值。
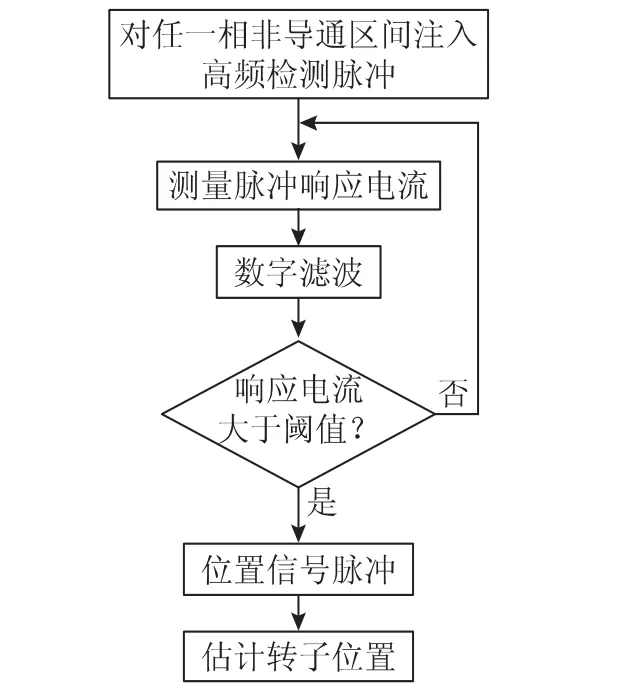
图3 脉冲注入流程图Fig.3 Flow chart of pulse injection
1.3 脉冲注入的时刻
导通相关断时的电流并非瞬间降为零,而需经续流衰减过程。传统的脉冲注入方法在续流区间注入高频脉冲,延长续流时间,产生较大的负转矩,不利于电机的运行。为避免电流续流区域的延长,必须要待续流电流下降到接近于零时才开始注入检测脉冲。改进的脉冲注入方法,通过设置一个接近零的电流阈值,比较续流电流与阈值的大小,当续流电流小于电流阈值后才开始向该相注入脉冲。脉冲注入时刻的原理如图4所示。通过对检测脉冲的注入时刻进行限定,设置电流阈值,一方面可避免在关断续流区间,由于检测脉冲的注入导致续流时间的延长从而产生较大的负转矩;另一方面,可避免关断续流区间由于非导通相电流比较而估计出错误换相信号。

图4 脉冲注入的时刻Fig.4 Determining method of Pulse injection
1.4 与电流梯度法结合
SRM 在起动或低速运行时,旋转反电动势很小,绕组电流的di/dt 很大,电流冲击过大会损坏开关管,针对这种情况一般采用电流斩波控制策略。在斩波控制运行时,通过调节电流斩波限来调节电机转速。一般通过增大电流斩波限来提高电机转速,随着电机转速的提高,在一个电角度周期里注入的高频脉冲数目会减少。开关磁阻电机高速时,电流几乎在整个电气周期内都流过相绕组,因此仅存有很少的时间用于注入检测脉冲。另外,高速情况不能忽略旋转反电动势的影响,因而非饱和电感计算非常复杂。可见,脉冲注入方法随电机转速的升高位置估计的准确度会随之下降。
当电流斩波限调到最大值时,即不再进行电流斩波控制,这时仍采取脉冲注入方法进行转子位置估计,估计准确度降低、效果变差,导致方法失效。此时,因为斩波限足够大,并未对导通相电流进行斩波控制,可结合传统电流梯度方法进行转子位置估计。通过提取电机绕组导通相的电流,即可检测电流梯度的过零点进行转子位置估计。提出的新的无位置电流梯度法估算转子位置原理如图5所示。以上两种无位置方法都是对电流的检测,低速时的脉冲注入单阈值方法是对非导通相脉冲响应电流进行比较控制,高速时的传统电流梯度法是对导通相的电流进行过零点检测。脉冲注入单阈值的无位置方法在一个周期内获取一个检索位置脉冲,与高速时电流梯度方法的单个周期中检测单个特殊位置点进行转子位置估计的原理一致。所以两种方法本质相同,在使用过程中易于统一。本文将以上两种方法结合,在电机转速升高时结合电流梯度法扩大提出的无位置方法的适用范围。
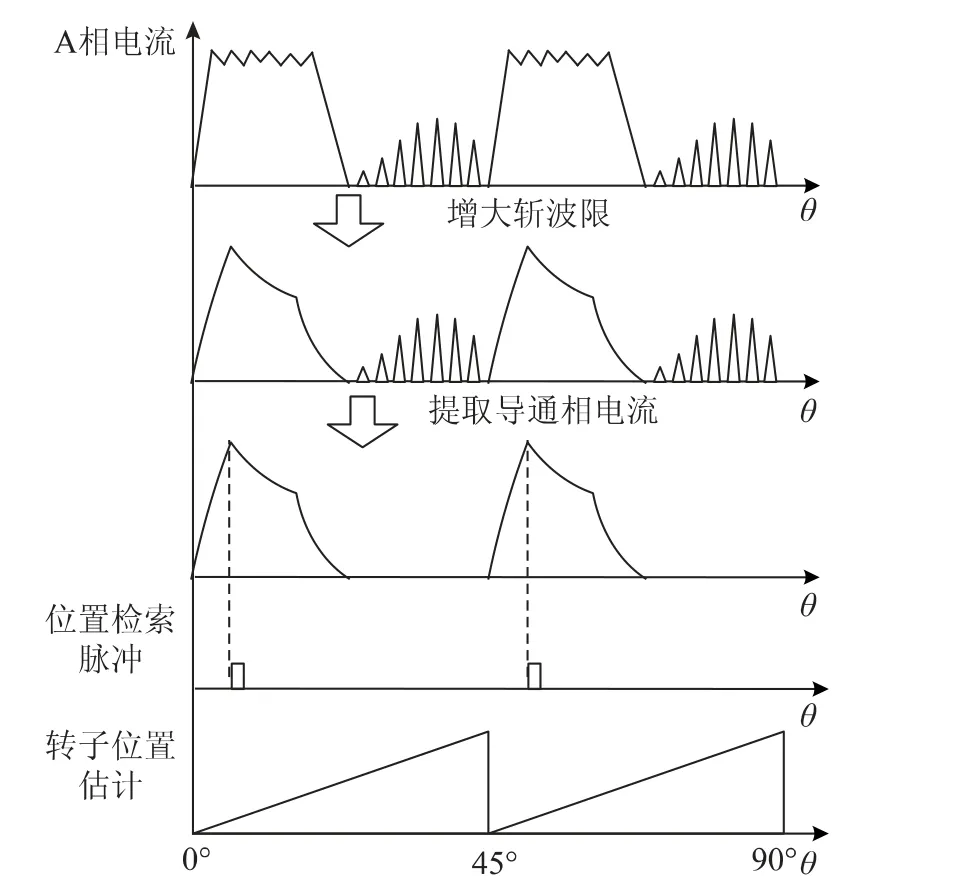
图5 提出的新的无位置方法电流波形Fig.5 Typical current waveform of the new sensorless control method
由相绕组电压平衡方程(1)可知,相电流在最小电感末端达到峰值,利用此特征可在每个周期内检测一次转子位置[16],相邻电周期内的两个检索脉冲之间相差一个电周期,即45°,那么只要记录它们之间相隔的时间t,便可由式(3)和式(4)分别估计出转速信息和转子位置信息

式中Δθ 和Δt分别为相邻电周期的位置检索脉冲之间的角度差和时间间隔。

式中:θ(k+1)和θ(k)分别为相邻采样周期的位置信号值;ΔT 为DSP 中断周期。
2 实验验证
为了进一步验证控制策略的可行性,本文以TI 公司的TMS320F2812 芯片为数字控制器,在一台三相12/8 极分块转子SRM 上进行实验研究。所用分块转子开关磁阻电机的参数可参见文献[20]。负载电机采用一台永磁无刷伺服电动机。实验平台如图6所示。其中,功率电路部分采用传统的三相不对称半桥结构,通过3 个电流传感器实时采集三相绕组电流,经过调理电路和A-D 转换后在DSP 中进行处理。另外在电机端部安装了3 个光电传感器,方便将估算位置与电机实际位置进行比较。
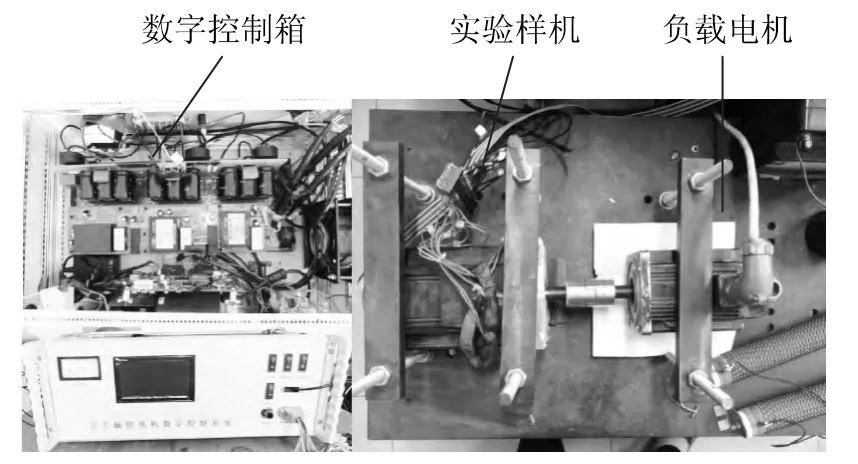
图6 实验平台Fig.6 Experimental platform
图7为注入的高频脉冲电压信号与对应的相电流之间的关系波形,从实验波形可看出,在注入高频脉冲的时刻,相电流已经续流到接近于零的阈值,这样就不会存在续流电流与脉冲电流的重叠现象,提高了位置估计的准确度,减少了负转矩影响。在非导通区间注入宽度逐渐增大的电压脉冲,响应电流峰值随脉冲宽度逐渐增大而增加。提取非导通相注入高频电压信号后的响应电流,在DSP 中进行数字滤波处理,与预先设置的电流阈值进行比较,即可估计出转子位置信息。

图7 电流波形与电压脉冲Fig.7 Phase current and the injected pulse waveforms
图8为电机转速为250 r/min,在θon=0°及θoff=18°情况下A 相电流与转子位置之间的关系波形。开关磁阻电机低速运行,采取斩波控制方式,非导通区间注入宽度逐渐增大的电压脉冲,提取非导通相电流,进行滤波处理。当电压固定时,电流阈值提前确定,滤波电流与阈值比较,进行转子位置估计。从实验波形可看出,电机低速时采用脉冲注入的单阈值方法,能正确给出A 相对应的位置脉冲信号,并实现对转子位置角的准确估计,误差较小。
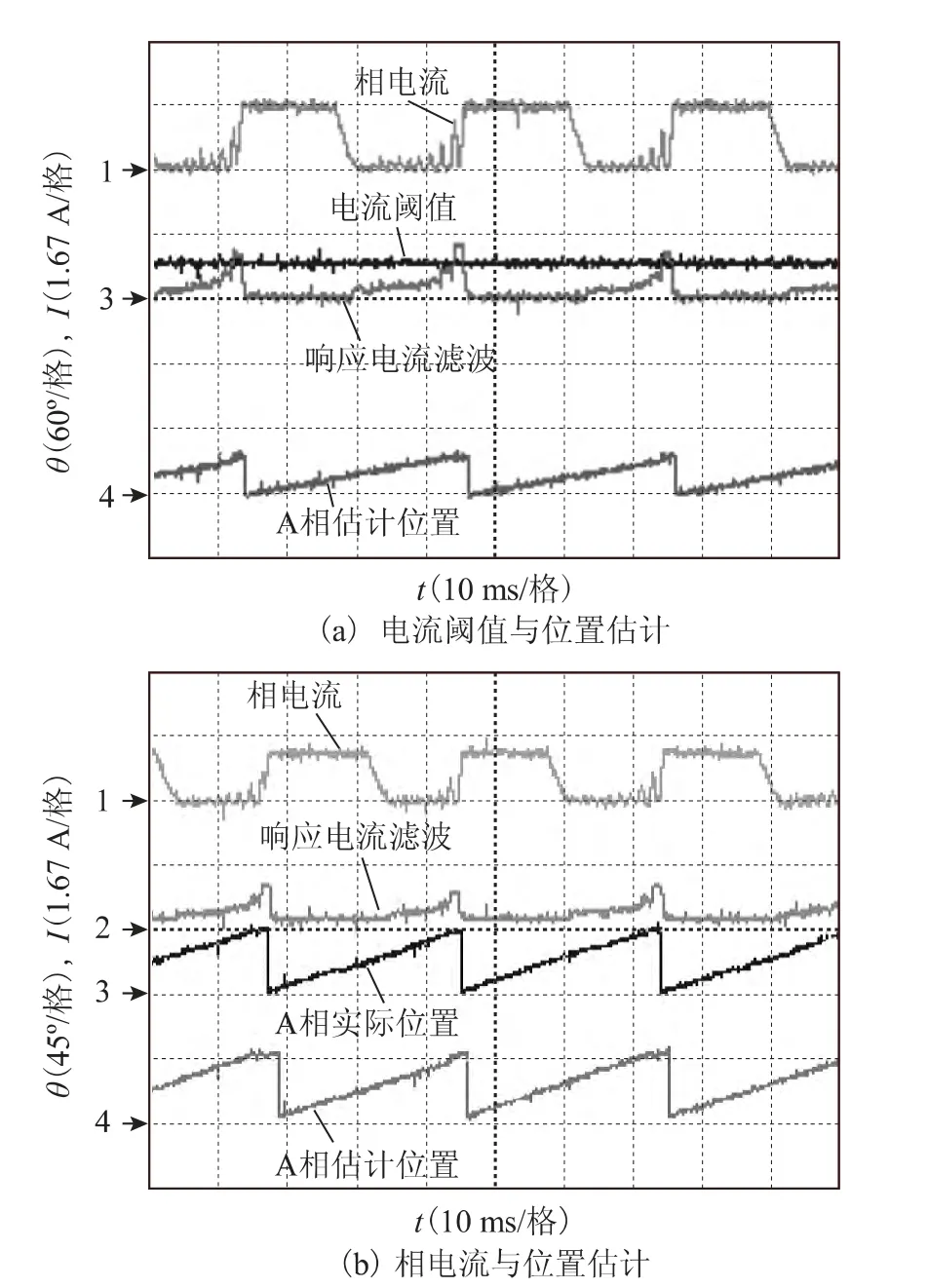
图8 脉冲注入相电流及位置估计波形Fig.8 Phase current and position estimation waveforms of the pulse injection sensorless method
图9为当母线电压为30 V,电流斩波限为4 A时的实验波形,此时转速为650 r/min。因为斩波限足够大,电机不再进行斩波控制,但在非导通区间仍注入电压脉冲,仍利用非导通区间的响应电流峰值与电流阈值进行比较,估计转子位置信息的方法。从波形可看出,由于单阈值方法易受到电压波动的影响,当转速升高时可看出转子误差明显,方法已经失效。
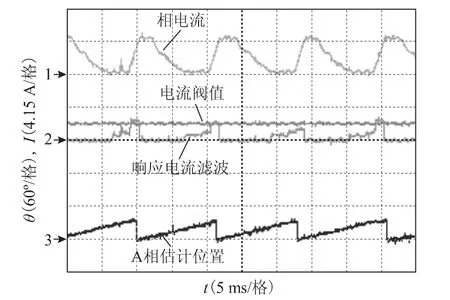
图9 脉冲注入无位置方法相电流及位置估计波形Fig.9 Phase current and position estimation waveforms of the pulse injection sensorless method
此时,因为斩波限足够大,并未对导通相电流进行斩波控制,可结合传统电流梯度方法进行转子位置估计。通过提取电机绕组导通相的电流,即可检测电流梯度的过零点进行转子位置估计。图10为电机转速为650 r/min,在θon=0°及θoff=18°情况下A 相电流及电流梯度过零点的位置脉冲与转子位置之间的关系波形。从实验波形可看出,采用电流梯度方法,通过提取导通时的电流,检测该电流的电流梯度过零点信号,即为定转子齿极开始重合的位置点信号。该方法能正确给出A相对应的位置脉冲信号并实现对转子位置角的准确估计,在转速升高时位置检测准确度提高,误脉冲减少。
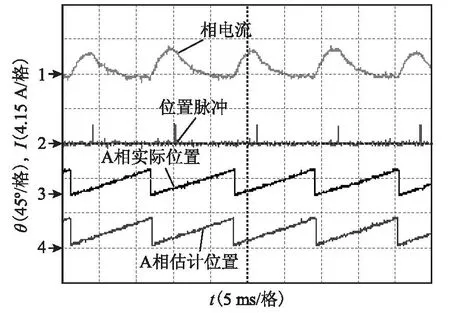
图10 电流梯度无位置方法相电流及位置角度估计波形Fig.10 Phase current and position estimation waveforms of the current gradient sensorless method
图11为电机在切除位置传感器的情况下A 相电流、电流斜率与转子位置之间的关系波形。从实验波形可看出,当位置传感器切除后,采用电流梯度方法,可正确估计转子位置角度,电机可正常运行。

图11 电流梯度无位置方法切除传感器实验波形Fig.11 Waveforms of the current gradient sensorless method
图12为电机转速为650 r/min,在θon=0°及θoff=18°情况下A 相电流、切换信号、转速与转子位置误差之间的关系波形。由于单阈值方法易受到电压波动的影响,当转速升高时可看出转子误差明显。此时进行无位置方法的切换,当切换信号变为1时,由脉冲注入法切换至电流梯度法。提取绕组导通区间的电流,采取电流梯度过零的检测方法进行转子位置的估计。从实验波形也可看出,高低速方法的切换过程转速平滑,在高速时采用电流梯度法角度误差减小。
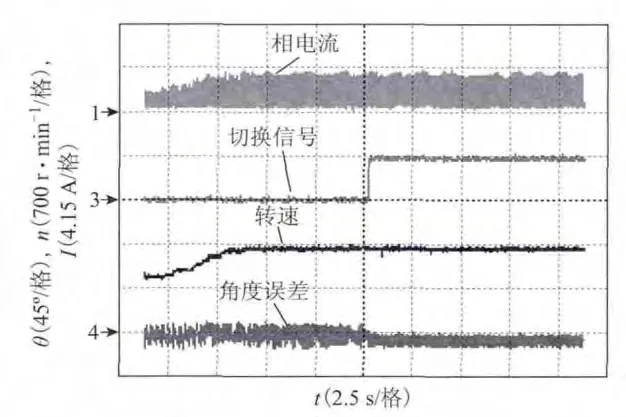
图12 切换过程转速和角度误差波形Fig.12 Position and angle estimation error during the switch-over area
3 结论
本文针对12/8分块转子开关磁阻电机,提出了一种改进的脉冲注入法。仅对电机一相绕组的非导通区间注入宽度逐渐增大的电压脉冲,通过响应电流与设定电流阈值的比较,进行转子位置估计。得到如下结论:
1)提出的改进的脉冲注入方法易实现,不需要附加硬件,算法简单。仅对电机一相绕组的非导通区间注入电压脉冲,各相独立,可实现电机缺相容错控制。
2)该方法对脉冲注入的时刻进行研究,消除负转矩的影响。
3)将传统的脉冲注入方法进行改进,使之与电流梯度法结合,扩大无位置传感器方法适用的转速范围,为下一步实现开关磁阻电机起动、低速、高速全速范围内的无位置方法打下基础。
[1] 王宏华.开关磁阻电动机调速控制技术[M].北京:机械工业出版社,1995.
[2] 吴建华.开关磁阻电机设计与应用[M].北京:机械工业出版社,2000.
[3] Ehsani M,Fahimi B.Elimination of position sensors in switched reluctance motor drives:state of the art and future trends[J].IEEE Transactions on Industrial Electronics,2002,49(1):40-47.
[4] Ehsani M,Husain I,Kulkarni A B.Elimination of discrete position sensor and current sensor in switched reluctance motor drives[J].IEEE Transactions on Industrial Application,1992,28(1):128-135.
[5] Acarnley P P,Hill R J,Hooper C W.Detection ofrotor position in stepping and switched motors by monitoring of current waveforms[J].IEEE Transactions on Industrial Electronics,1985,32(3):215-222.
[6] Husain I,Ehsani M.Rotor position sensing in switched reluctance motor drives by measuring mutually induced voltages[J].IEEE Transactions on Industry Applications,1994,30(3):665-672.
[7] Suresh G,Fahimi B,Rahman K M,et al.Inductance based position encoding for sensorless SRM drives[C].30th Annual IEEE Power Electronics Specialists Conference,Charleston,SC,1999,2:832-837.
[8] Bu Jianrong,Xu Longya.Eliminating starting hesitation for reliable sensorless control of switched reluctance motors[J].IEEE Transactions on Industry Applications,2001,37(1):59-66.
[9] 刘卫国,宋受俊,Uwe Schäfer.无位置传感器开关磁阻电机初始位置检测方法[J].中国电机工程学报,2009,29(24):91-97.
Liu Weiguo,Song Shoujun,Uwe Schäfer.Initial position estimation of sensorless switched reluctance motor[J].Proceedings of the CSEE,2009,29(24):91-97.
[10] 邱亦慧,马志源,詹琼华.无位置传感器开关磁阻电机的无反转起动研究[J].电工技术学报,2001,16(2):18-22.
Qiu Yihui,Ma Zhiyuan,Zhan Qionghua.Start exploration of position sensorless SRM without rotor reversing[J].Transactions of China Electrotechnical Society,2001,16(2):18-22.
[11] Gao H,Salmasi F R,Ehsani M.Sensorless control of SRM at standstill[C].Sixteenth Annual IEEE Applied Power Electronics Conference and Exposition,Anaheim,CA,2001:850-856.
[12] 李景男,王旭东.基于两相脉冲激励的开关磁阻电动机的无位置传感器转子位置检测[J].电机与控制学报,2002,6(1):6-9.
Li Jingnan,Wang Xudong.Sensorless rotor position detection of SRM based on voltage pulses to two phases[J].Electric Machines and Control,2002,6(1):6-9.
[13] 蔡骏,邓智泉.基于全周期电感法的开关磁阻电机无位置传感器控制技术[J].电工技术学报,2013,28(2):145-154.
Cai Jun,Deng Zhiquan.Sensorless control of switched reluctance motors based on full-cycle inductance method[J].Transations of China Electrotechnical Society,2013,28(2):145-154.
[14] 毛宇阳,邓智泉,蔡骏.基于电流斜率差值法的开关磁阻电机无位置传感器技术[J].电工技术学报,2011,26(9):91-97.
Mao Yuyang,Deng Zhiquan,Cai Jun.Sensorless control of switched reluctance motor based on current slope difference method[J].Transations of China Electrotechnical Society,2011,26(9):91-97.
[15] Gallegos-Lopez G,Kjaer P C,Miller T J E.A new sensorless method for switched reluctance motor drives[J].IEEE Transactions on Industrial Application,1998,34(4):832-840.
[16] Cai Jun,Deng Zhiquan.Sensorless control of switched reluctance motor based on phase inductance vectors[J].IEEE Transactions on Power Electronics,2012,27(7):3410-3423.
[17] 夏长亮,谢细明,史婷娜,等.开关磁阻电机小波神经网络无位置传感器控制[J].电工技术学报,2008,23(7):33-38.
Xia Changliang,Xie Ximing,Shi Tingna,et al.Position sensorless control of switched reluctance motor using waveletneural networks[J].Transactions of China Electrotechnical Society,2008,23(7):33-38.
[18] 张旭隆,谭国俊,蒯松岩,等.在线建模的开关磁阻电机四象限运行无位置传感器控制[J].电工技术学报,2012,27(7):26-33.
Zhang Xulong,Tan Guojun,Kuai Songyan,et al.Four-quadrant position sensorless control of switched reluctance motors based on on-line modeling[J].Transactions of China Electrotechnical Society,2012,27(7):26-33.
[19] 陈小元,邓智泉,王晓琳,等.分块开关磁阻电机的研究现状及其新结构构想[J].电工技术学报,2011,26(3):20-28.
Chen Xiaoyuan,Deng Zhiquan,Wang Xiaolin,et al.Current status and new configurations of segmented switched reluctance machines[J].Transactions of China Electrotechnical Society,2011,26(3):20-28.
[20] 陈小元,邓智泉,许培林,等.整距绕组分块转子开关磁阻电机的电磁设计[J].中国电机工程学报,2011,31(36):109-115.
Chen Xiaoyuan,Deng Zhiquan,Xu Peilin,et al.Electromagnetic design of a switched reluctance motor with segmental rotors and full-pitch windings[J].Proceedings of the CSEE,2011,31(36):109-115.
猜你喜欢
科技创新导报(2022年17期)2022-09-22
微电机(2022年1期)2022-03-21
莆田学院学报(2021年5期)2021-11-13
防爆电机(2021年4期)2021-07-28
甘肃科技(2020年20期)2020-04-13
电子制作(2018年19期)2018-11-14
电测与仪表(2016年1期)2016-04-12
电机与控制应用(2015年2期)2015-03-01
电机与控制应用(2015年1期)2015-03-01
电测与仪表(2014年21期)2014-04-04