多电平电压源型逆变器的容错技术综述
2015-06-24 06:23张建忠
电工技术学报 2015年21期
徐 帅 张建忠
(东南大学电气工程学院 南京 210096)
0 引言
多电平电压源型逆变器因具有控制方式多样、输出电流谐波含量低以及逆变效率高等良好特性已成为高压大功率应用的热点,如高压电动机变频调速、高压直流输电、统一电能质量调节器、超导储能和大功率不间断电源等领域[1-3]。受当前电力电子技术水平整体限制,逆变器系统的可靠性远低于机电装置的其他部分。因此,在航空航天、电力系统和军事装备等对设备连续运行要求较高的场合,提高逆变器系统的可靠性显得尤为重要。采用容错技术是提高逆变器系统可靠性的主要途径之一。故障容错技术包括故障检测和诊断、故障隔离以及软硬件冗余等,其中软硬件冗余设计是故障容错非常关键的环节[4-9]。
多电平逆变器的功率器件数量随着逆变器电平数的增加而增加,这一方面大大增加了多电平逆变器发生故障的概率,另一方面,多电平逆变器本身具备一定的冗余能力,即通过电平数的降低可释放部分冗余资源,从而保证系统故障下具备以较低电平数继续运行的能力。多电平逆变器故障下实现容错运行的关键在于如何简单有效地利用这些资源且尽量减少负面效应(如成本增加或增加设计与控制方面的难度[10-13])。
逆变器常见的故障类型包括直流母线接地短路(F1)、直流母线电容短路(F2)、功率器件触发脉冲丢失(F3)、功率器件短路(F4)、功率器件开路(F5)、逆变器桥臂短路(F6)、输出交流侧开路(F7)、相间短路(F8)以及单相对地短路(F9)等[12,13]。以三相变频驱动系统中电压源型逆变器为例,常见故障类型的位置示意图如图1所示。
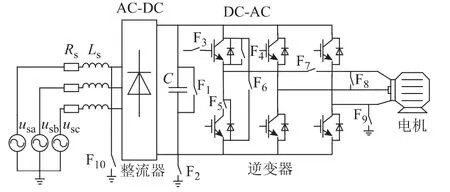
图1 电压源型逆变器故障示意图Fig.1 Fault schematic diagram of voltage source inverter
本文主要研究多电平电压源型逆变器功率器件开路和短路故障(F3~F6)的容错。由于功率器件短路故障发生的时间一般极短(10 μs 以内),难以检测,所以短路故障通常在电路中串联快速熔断器,从而转换为开路故障[13]。
1 钳位型多电平逆变器的容错
R.Spee 等[14]于1988年提出了一种容错型逆变器拓扑,并应用于直流无刷电动机的驱动系统。T.H.Liu 等[15,16]于1991年提出了在传统两电平三相逆变器中增加第四冗余桥臂的思想。基于冗余思想的提出,G.Sinha 等[16]于1995年提出利用多电平逆变器的自身冗余开关状态来实现容错运行。近年来,各种多电平逆变器容错拓扑及控制方法相继被提出[17-39]。
1.1 二极管钳位型三桥臂逆变器
传统三电平二极管钳位型逆变器拓扑如图2所示,由3 个桥臂组成三相输出,每相桥臂由4 个绝缘栅双极型晶闸管(Insulated Gate Bipolar Thyristor,IGBT)各反并联一个二极管串联组成,分压电容C1=C2。Sx1~Sx4(x=a,b,c)中每两个功率器件处于导通或关断状态,其中(Sx1,Sx3)和(Sx2,Sx4)为互补的开关对。逆变器正常运行时,输出正电平、零电平和负电平3 种电平状态。但是,当功率器件发生开路或短路故障时,将使故障桥臂不能正常运行,从而导致逆变器输出电压不平衡、输出电流谐波畸变率增加、调制度降低以及逆变器效率降低等问题。例如Sa1发生开路故障时,A 相将不能输出正电平,从而导致输出的三相电压、电流不平衡现象。

图2 三电平二极管钳位型逆变器拓扑Fig.2 The topology of three-level diode-clamped inverter
三电平二极管钳位型逆变器有33=27 种开关状态组合,对应27 个空间电压矢量。当功率器件发生故障时,可利用冗余的空间电压矢量,使逆变器容错运行[17,18]。例如当Sa1发生短路故障时,A 相将不能输出零电平,故障后可用的电压空间矢量如图3a 所示,图中虚线所示矢量为故障后的不可用矢量。当Sa2发生短路故障,A 相失去输出负电平能力,重构后电压空间矢量如图3b 所示。利用冗余矢量进行容错,不需要增加额外器件,成本较低,但由于一些关键开关状态的减少,逆变器故障重构后最大调制度降低为正常时的一半。
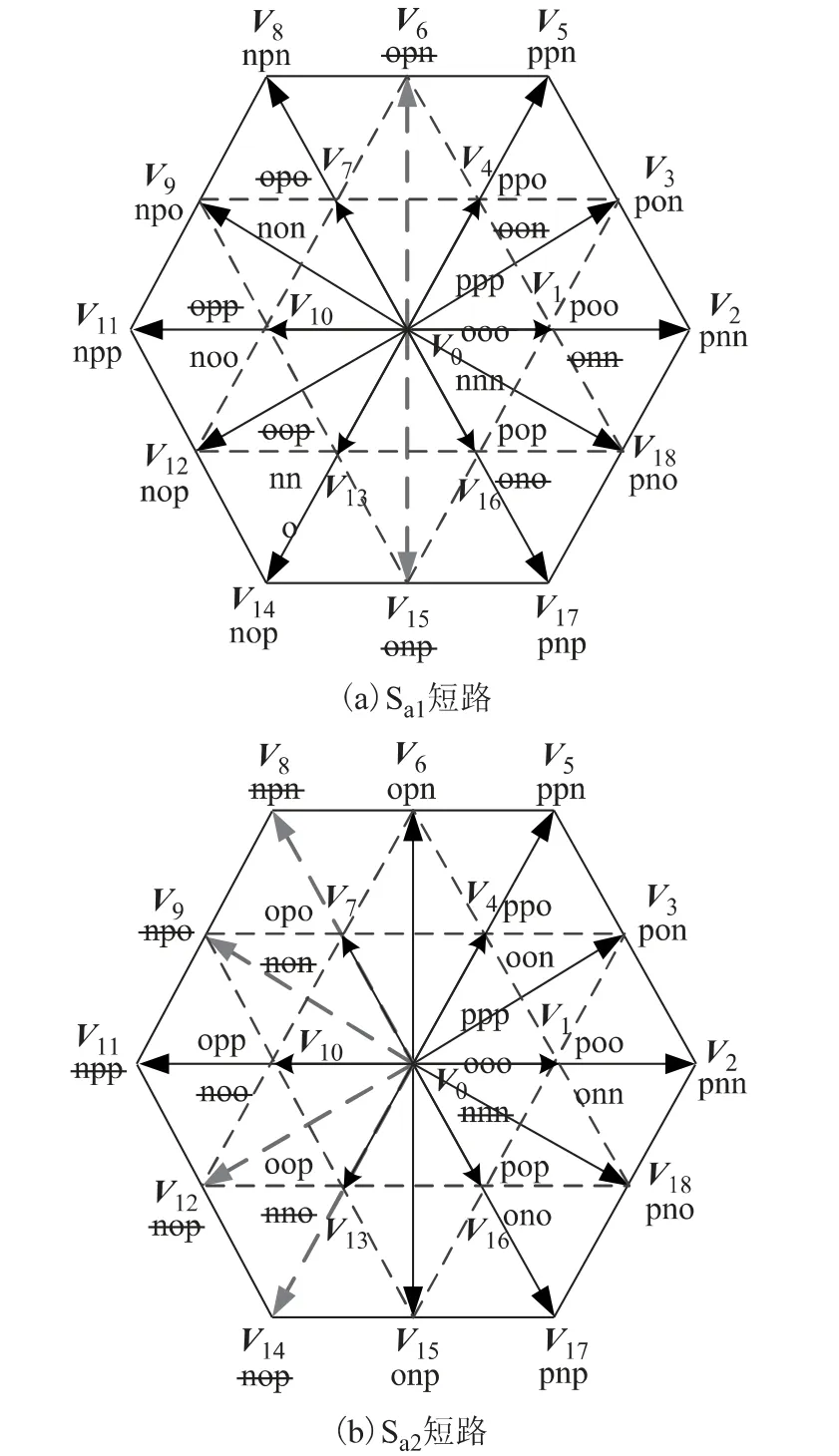
图3 故障后的空间电压矢量图Fig.3 Space voltage vector diagram after fault
图3所示的逆变器软件容错方法利用自身的冗余开关矢量可以容错功率器件的开路和短路故障,但重构后的最大调制度和输出电压幅值降低,而且需要增大一些功率器件的耐压值。通过增加一些开关器件进行硬件容错是实现逆变器故障容错的行之有效的方法。图4为两种二极管钳位三电平逆变器容错拓扑单相桥臂结构[19-21]。
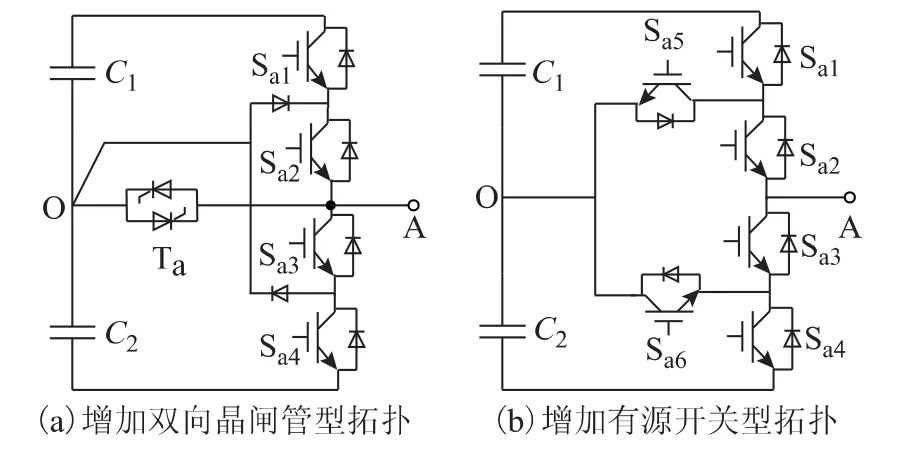
图4 三电平二极管钳位型容错拓扑单相桥臂Fig.4 Fault-tolerant single-phase bridge arm of three-level diode-clamped inverter
图4a 是在传统三电平二极管钳位型拓扑基础上,每相桥臂与直流母线中点之间增加一个双向可控晶闸管,用来隔离故障桥臂[19]。例如当A 相桥臂发生短路或开路故障时,触发Ta导通隔离故障相,从而将A 相桥臂的输出端连接至直流母线中点。采用该容错方案故障后功率器件不承受过电压,因此不必增大功率器件的耐压值。但故障桥臂连接至直流母线中点,将使输出电压不平衡。为了保证故障重构后得到平衡的线电压,需要采用改进的调制策略,假设正常状态下逆变器三相参考电压为

当A 相桥臂故障时,逆变器输出相电压va=0,调整B、C 间的相角从120°减小为60°,故障重构后得到的等效平衡线电压为
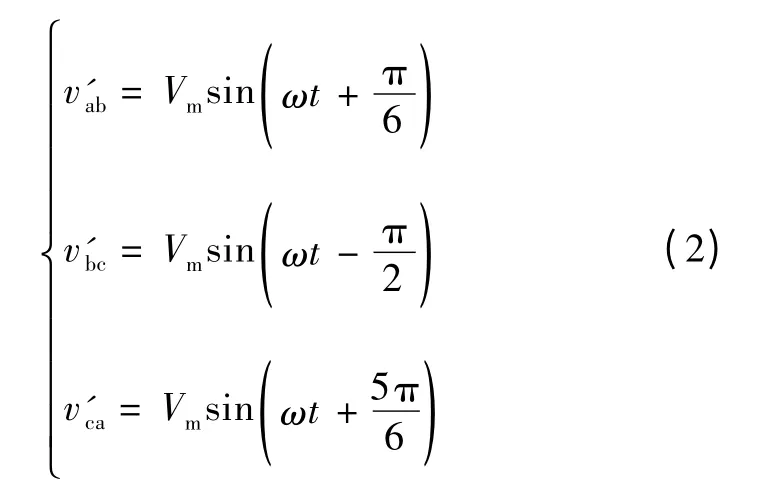
图5为A 相桥臂故障重构前后的电压矢量图,重构后的平衡线电压和等效平衡相电压均降低为正常值的倍,逆变器降额运行。

图5 A 相桥臂故障重构的电压矢量图Fig.5 The voltage phasor diagram of A-phase bridge arm after fault reconstruction
图4b 所示的容错拓扑为采用一对IGBT 代替相应钳位二极管。由于每相桥臂增加一对IGBT,增加了新的冗余开关状态,这些开关状态在正常运行时用来平衡器件的功率损耗,可有效提高逆变器的输出功率。当桥臂故障时可利用开关组合将故障桥臂连接至直流母线中点[20,21]。例如当功率器件Sa1开路或短路导致A 相桥臂故障时,触发(Sa2、Sa5)或(Sa3、Sa6)导通,使A 相输出端连接至直流母线中点。采用改进的PWM 调制方法,如同图4a 的容错拓扑可得到平衡的线电压,而且不需要增加功率器件的耐压值。图4a 和图4b 所示的两种容错拓扑故障重构后的最大调制度均降低为正常时的一半,平衡线电压幅值降低为正常时的 1/ ■3倍。
为了解决逆变器输出电压和调制度降低的问题,文献[22,23]在三电平NPC 型拓扑基础上增加了快速熔断器和晶闸管,两种容错拓扑的单相桥臂如图6所示。

图6 三电平二极管钳位型逆变器容错拓扑单相桥臂(含快速熔断器和晶闸管)Fig.6 Fault-tolerant single-phase bridge arm of three-level diode-clamped inverter(with fast fuse and thyristor)
图6a 所示的增加熔断器型拓扑,通过熔断器和晶闸管与电容形成短路回路可有效隔离故障[22]。例如内开关Sa2发生短路故障,当输出端需要输出低电平时,Sa3和Sa4处于导通状态,在不采取措施情况下C2、Sa2、Sa3、Sa4将构成短路回路,在任何时刻都无法输出低电平。因此当检测到Sa2短路故障时,立即触发Ta1导通,使C1、Fa1、Ta1构成局部短路回路,从而熔断Fa1隔离故障。故障重构过程如图7所示,重构后故障桥臂工作在高电平和低电平的两电平状态,解决了最大调制度降低的问题。但故障后一些功率器件仍会承受过电压。
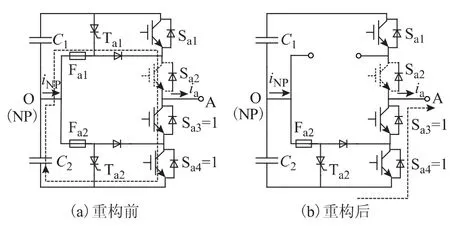
图7 Sa2短路故障重构前后的单相桥臂Fig.7 Single-phase bridge arm before and afterreconstruction under Sa2fault
图6b 所示的增加熔断器和有源开关型拓扑,在图6a 的基础上用IGBT 代替了钳位二极管[23]。该拓扑综合了图4b 和图6a 拓扑的优点,可以容错单相桥臂上的多个故障或多相桥臂同时故障的情况,不仅解决了输出电压和最大调制度降低的问题,而且在一些故障情况下,使重构后的拓扑仍运行在三电平状态。
图6a 和图6b 两种拓扑存在的主要缺点为逆变器故障重构后一些半导体器件需要承担整个直流母线电压,所以需要增大器件的耐压值,因此也增加了成本。
1.2 飞跨电容钳位型三桥臂逆变器的容错
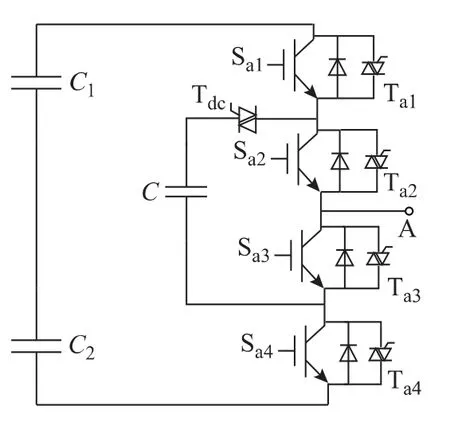
图8 飞跨电容钳位型逆变器容错拓扑单相桥臂Fig.8 Fault-tolerant single-phase bridge arm of flying across capacitor-clamped inverter
图8为飞跨电容型三桥臂逆变器容错拓扑A 相桥臂,每相桥臂的钳位电容串联一个双向晶闸管,每个功率器件并联一个双向晶闸管,用来旁路相应的故障器件[24,25]。该容错拓扑不需要增加冗余桥臂,就可以容错功率器件的开路和短路故障,使输出三相电压仍保持平衡。例如当Sa1发生开路故障时,通过触发Ta1将Sa1旁路,同时触发Sa4导通、Tdc关断,将内桥臂的电容支路隔离,重构后的逆变器运行于传统两电平模式。随着电平数的增加,输出相同电压下可能的开关组合类型增加。但该拓扑存在的缺点是重构后Sa2和Sa3必须承担两倍于正常情况下的电压幅值,增大了内桥臂功率器件的耐压要求。
基于三桥臂的逆变器容错拓扑,虽然结构简单,不需要增加冗余桥臂,但存在的缺点是当功率器件故障时,最大调制度及交流侧输出电压幅值降低。由于逆变器容错拓扑故障重构后调制度降低,并且逆变器在并网应用中要求其调制度接近最大值,因此该容错方案不适用于并网逆变器系统中。
1.3 混合钳位型四桥臂逆变器
文献[22]提出了一种混合四桥臂三电平逆变器容错拓扑,如图9所示。主桥臂为三电平二极管钳位型逆变器桥臂,第四桥臂为飞跨电容型单相桥臂。在正常运行模式下,第四桥臂为主桥臂提供一个可靠的中点电压钳位点。因为飞跨电容可以改变流经第四桥臂的电流iNP,所以当直流侧中点电压发生偏差时,可通过调节流经飞跨电容的电流iNP的大小和方向来平衡中点电压[23]。
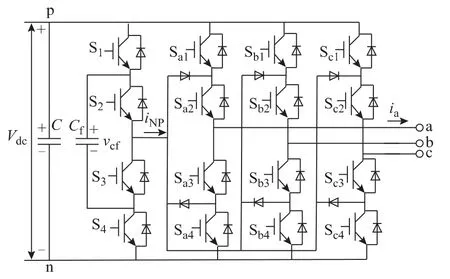
图9 混合钳位型逆变器容错拓扑Fig.9 Fault-tolerant topology of mix-clamped inverter
在任意一个主桥臂发生故障时,第四桥臂可以代替故障桥臂。例如当功率器件Sa4开路时,触发Sa2和Sa3导通,使A 相桥臂连接至第四桥臂的中点,从而第四桥臂将代替A 相桥臂运行于三电平状态。其他两相主桥臂由于失去中点钳位点,运行于高电平、低电平的两电平状态。
第四桥臂的开关状态和电压、电流关系如表1所示。
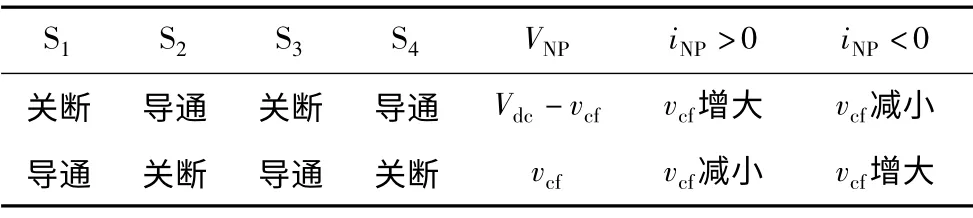
表1 开关状态、NP 电压和流经NP 电流Tab.1 Switching state,voltage and current of neutral point
图9所示的容错拓扑,其优点是第四桥臂在正常运行时为主桥臂提供一个可靠平衡的中点钳位点,抑制了输出电压的低频振荡。但系统故障重构后输出电压不平衡,需要改进的调制策略来控制输出电压的平衡;而且故障后部分功率器件需要承担整个直流母线电压,增加了成本和损耗。
文献[26,27]对文献[22]中提出的混合四桥臂三电平逆变器容错拓扑进行了改进,增加了一个飞跨电容型冗余桥臂,并通过两个反向串联的IGBT 连接至直流母线的中点,图10为A 相主桥臂和第四冗余桥臂的结构。
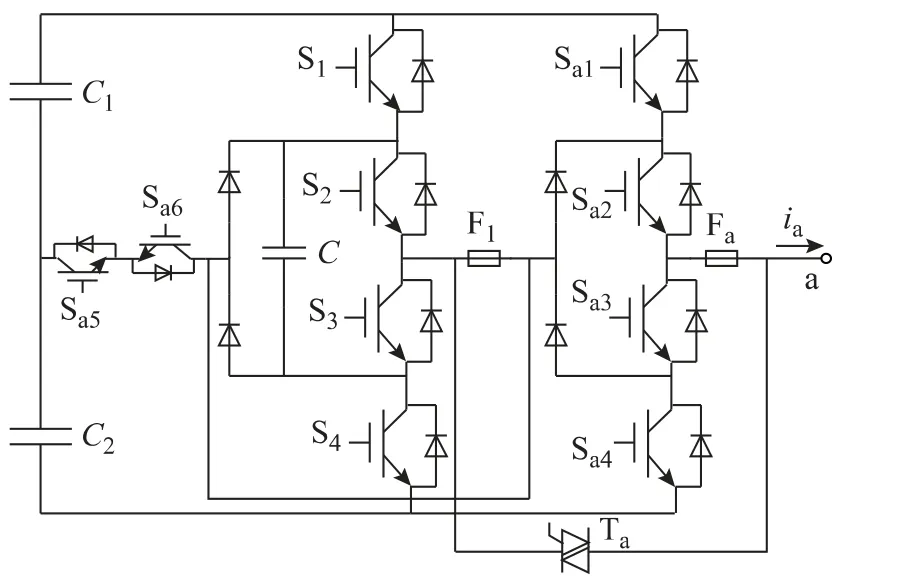
图10 混合钳位型逆变器单相桥臂(含飞跨电容钳位型桥臂)Fig.10 Fault-tolerant topology of mix-clamped inverter(with flying across capacitor-clamped bridge)
当飞跨电容型冗余桥臂上功率器件故障导致桥臂故障时,熔断F1,同时触发Sa5和Sa6导通,Ta保持关断状态,从而将故障的冗余桥臂隔离,重构后逆变器运行于三电平状态。当A 相桥臂的Sa1发生短路故障时,首先,触发正常两相的下桥臂功率器件导通,然后触发Sa2和Sa3导通,同时触发冗余桥臂的下臂功率器件S3、S4和Ta导通,从而熔断F1和Fa,隔离了故障,使输出端连接至冗余桥臂的中点。当Sa1发生开路故障时,触发正常桥臂的两个上臂功率器件导通,同时触发Sa2、Sa3、Sa4和S1导通,从而熔断F1,并使Sa5、Sa6和Ta一直保持导通状态,重构后逆变器运行于三电平状态。
图10所示的容错拓扑优点为故障重构后仍可运行于三电平状态;所有功率器件只需承担1/2 的直流母线电压;冗余桥臂中的功率器件工作在低频状态,所以功率损耗增加不大。但故障重构后,输出电压仍存在低频电压振荡问题。
文献[28]提出了一种抑制NP 低频电压振荡的三电平四桥臂逆变器拓扑,如图11所示,增加一个二极管钳位型第四桥臂,通过电感连接至直流母线中点。正常运行状态下,第四桥臂向钳位点NP 注入电感电流iL来平衡钳位点电压VNP。平均电流计算公式如式(3)~式(5)所示。
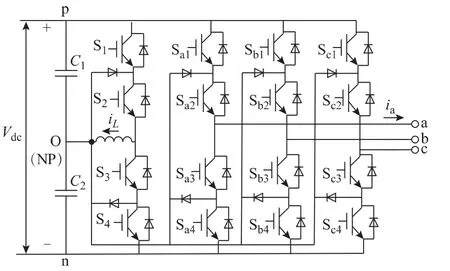
图11 三电平四桥臂二极管钳位型逆变器容错拓扑Fig.11 Fault-tolerant topology of three-level four-bridge diode-clamped inverter
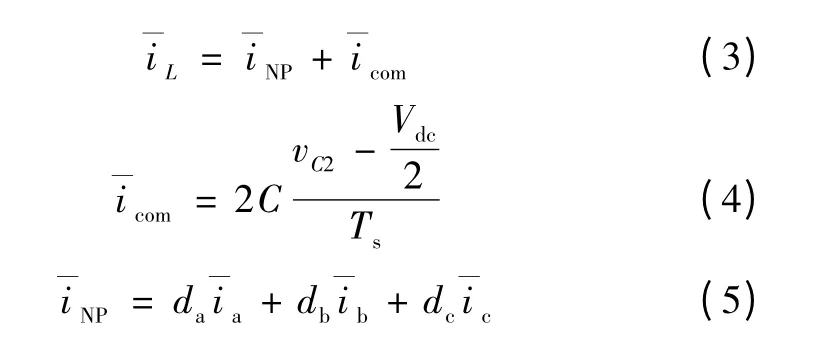
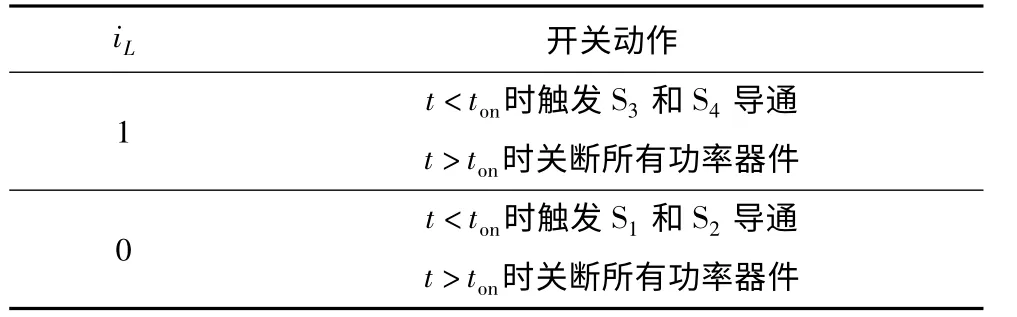
表2 第四桥臂的开关状态Tab.2 Switching state of the fourth bridge
开关的开通时间ton在每个调制周期内可通过式(6)计算,一个开关周期内流经电感的电流波形如图12所示。
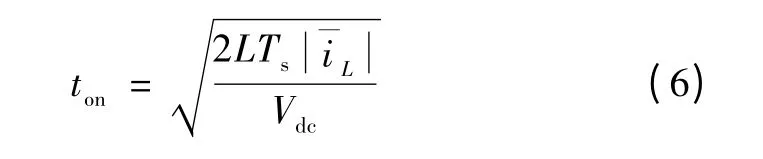
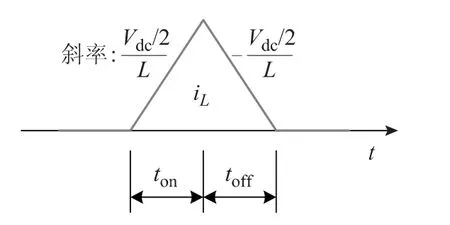
图12 第四桥臂电感电流波形图Fig.12 The inductor current waveform of the fourth bridge
在开关周期开始时,电流为零,由主桥臂切换至第四桥臂是在零电流状态(ZCS)下进行的,因此,换相过程不产生开关损耗。
1.4 三相四桥臂并网型逆变器的容错
文献[28-34]研究了应用于并网发电系统逆变器的三电平四桥臂容错技术。图13为三电平二极管钳位型并网逆变器主电路拓扑。逆变器拓扑由3 个二极管钳位型桥臂构成,直流母线由两个分裂式电容串联组成,交流侧通过输出电感连接至电网。
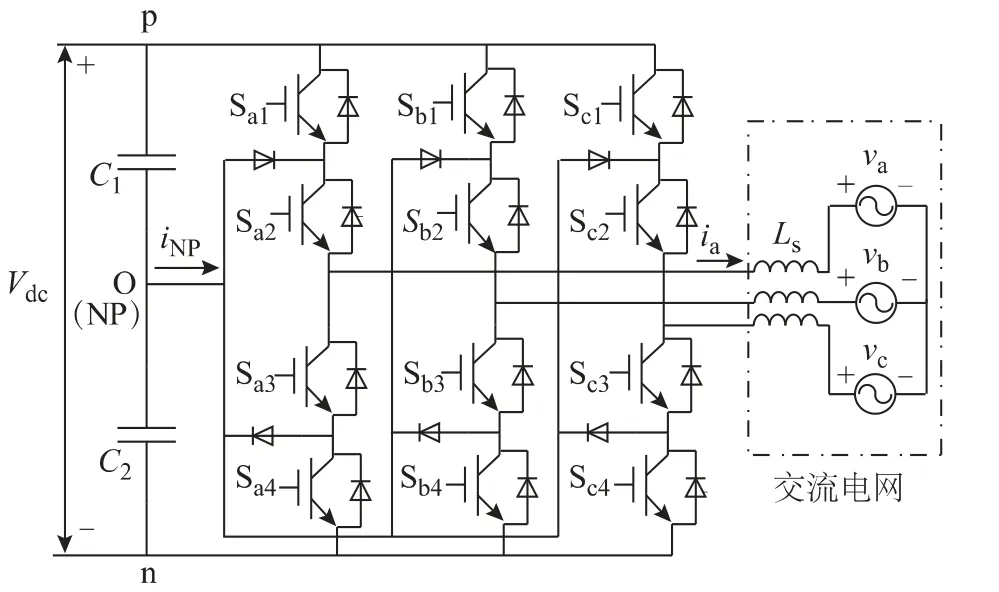
图13 三电平二极管钳位型并网逆变器拓扑Fig.13 The topology of three-level diode-clamped grid-connected inverter
1.4.1 电感电流注入型
文献[28,29]提出了含连接电感的三电平四桥臂逆变器容错拓扑,如图14所示,在基本三电平二极管钳位型并网逆变器拓扑基础上,第四桥臂中点通过电感连接至直流母线中点,主桥臂的输出端通过开关连接至第四桥臂中点。正常状态下,R1、Ra1、Rb1、Rc1处于闭合状态,Ra2、Rb2、Rc2处于断开状态,因为每相的连接开关是串联的,所以减少了寄生电感的影响。
当A 相主桥臂发生故障时,控制开关R1和Ra1断开、Ra2闭合,隔离A 相桥臂,第四桥臂替代A 相桥臂,重构后的拓扑运行于标准三电平状态。
当第四桥臂发生故障时,控制开关R1断开,隔离第四桥臂,重构后保持标准三电平NPC 运行。但电容电压将失去平衡能力,钳位点NP 仍存在低频电压振荡现象。因此应采用抑制NP 低频电压振荡和平衡电容电压的调制策略。控制NP 电压平衡的同时也会增加正常桥臂的功率器件损耗,所以在故障状态下,调制策略应同时兼顾逆变器中点电压平衡和功率器件损耗。其次,因为连接开关的响应速度较慢,故障重构需要数十毫秒的时间,这样会使故障桥臂的一些功率器件承受整个直流母线电压,从而会增加一定的功率损耗。
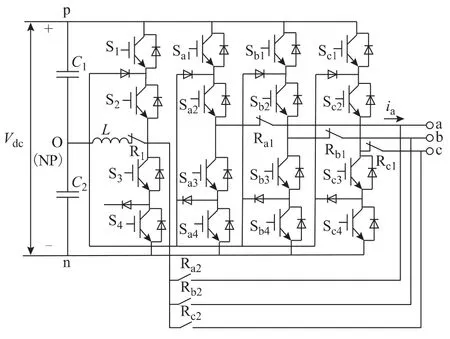
图14 电感电流注入型三电平四桥臂逆变器容错拓扑Fig.14 The inductor current injection type three-level four-bridge inverter topology
1.4.2 有源钳位型
图15为有源钳位型三电平四桥臂逆变器容错拓扑[28],采用IGBT 代替三相主桥臂中相应的钳位二极管,避免了功率器件的过电压现象。

图15 有源钳位型三电平四桥臂逆变器容错拓扑Fig.15 The active-clamped three-level four-bridge inverter topology
当第四桥臂发生故障时,控制开关R1断开隔离第四桥臂,逆变器重构后保持标准三电平运行。当主桥臂某一相功率器件故障时,控制故障相输出端连接至第四桥臂中点。例如当Sa1发生短路故障时,触发Sa3、Sa6导通,使故障相输出端连接至直流母线中点,避免了功率器件承受整个直流母线电压的情况。但重构后的最大调制度降低为正常时的一半,从而输出电压幅值和输出功率降低,限制了其应用范围。
1.4.3 电气隔离型
图16为电气隔离型三电平四桥臂逆变器容错拓扑[28],在保留各种容错功能的基础上,在逆变器交流侧输出电感和电网或电机系统之间增加了双向晶闸管、快速熔断器和接触器,隔离故障过程中可以避免过高的dv/dt 所带来的晶闸管不理想换相问题。
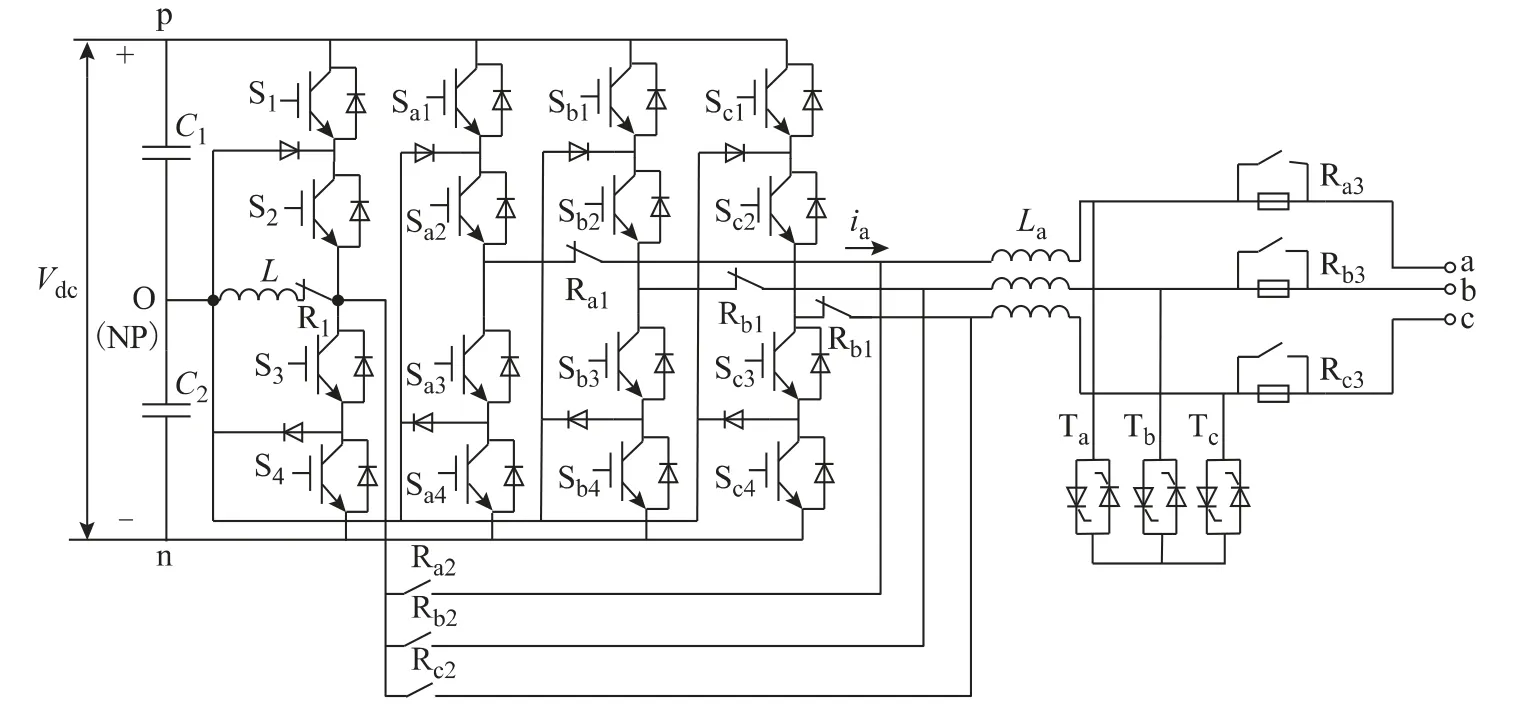
图16 电气隔离型三电平四桥臂逆变器容错拓扑Fig.16 Fault-tolerant topology of electric isolation type three-level four bridge inverter
例如当逆变器主桥臂的功率器件故障时,熔断相应的熔断器,在不影响正常功率器件的情况下,将故障与电网或电机系统隔离。例如Sa1发生故障时,触发双向晶闸管Ta、Tb、Tc导通,通过形成局部短路从而熔断至少两相的熔断器。一旦熔断器被熔断,打开R1和Ra1,并闭合开关Ra2、Ra3、Rb3、Rc3,此时,A 相桥臂被隔离,第四桥臂代替A 相桥臂,系统重构后运行于标准三电平状态。当第四桥臂的某个功率器件故障时(开路或短路),必须停止该桥臂的换相,重构后逆变器仍运行于标准三电平状态。
图16所示的逆变器容错拓扑由于熔断器和双向晶闸管在电网侧,使逆变器拓扑与熔断器的熔断过程形成了隔离,因此可以防止晶闸管承受较大的dv/dt,从而有效避免了换相失败的问题。
图14所示的含连接电感型三电平四桥臂逆变器容错拓扑结构简单,故障重构过程中不需要改变调制度,也不需要增加快速熔断器。但故障重构后的一些器件会承受过电压,需要增加功率器件的耐压值,从而增加了逆变器成本,也限制了其应用范围。图15所示的有源钳位型三电平四桥臂逆变器容错拓扑故障重构后避免了器件的过电压,不需要增大功率器件的耐压值,降低了逆变器成本。但当主桥臂故障时,重构后的调制度降低为正常时的一半,输出功率和输出电压幅值降低。图16所示的电气隔离型三电平四桥臂逆变器容错拓扑,不仅避免了功率器件的过电压,而且系统重构后调制度不变。因此该容错拓扑的应用范围较广泛。表3 为上述钳位型逆变器容错拓扑的性能比较。

表3 钳位型逆变器容错拓扑比较Tab.3 Comparation of fault-tolerant clamped inverter topology
2 级联型多电平逆变器的容错
目前,级联型多电平逆变器逐渐被应用于高压大功率场合(如高压直流输电,柔性交流输电等)。级联型多电平逆变器的模块化使其更容易实现容错运行[35-40]。
2.1 采用硬件冗余单元
文献[9,35]研究了级联型多电平逆变器的容错技术,其基本思想是采用硬件冗余单元实现容错运行。容错型级联11 电平逆变器拓扑如图17所示,每相有5 个正常单元模块和一个冗余单元模块,冗余单元模块在逆变器正常运行时均处于旁路状态。带旁路开关的子单元模块如图18所示。该容错方法不需要增加冗余器件,而且重构后逆变器输出功率不变。
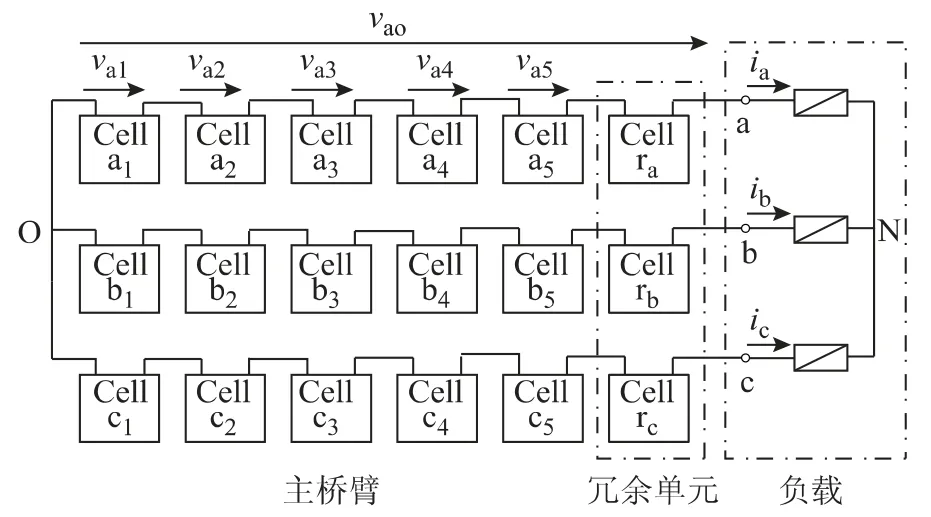
图17 容错型级联多电平逆变器Fig.17 Fault-tolerant cascade multilevel inverter

图18 级联多电平逆变器单元Fig.18 Cascade multilevel inverter unit
级联型多电平逆变器中单元模块的故障隔离方法有3 种:①采用旁路开关;②单元模块输出端并联一个三端双向可控开关元件;③控制故障单元模块中正常功率器件的通断。冗余模块的投入过程为:当A 相桥臂一个单元模块a1故障时,将a1的旁路开关T 置于f,同时将ra模块的旁路开关置于n,此时冗余模块代替了故障模块,逆变器运行于容错模式,如图17所示。还可通过控制故障单元中正常工作的功率器件的开关状态隔离故障,如图18中功率器件S1开路故障时,控制S3和S4导通,同时控制S2关断,从而隔离了故障单元。表4 为各种故障状态下IGBT 的脉冲驱动信号。
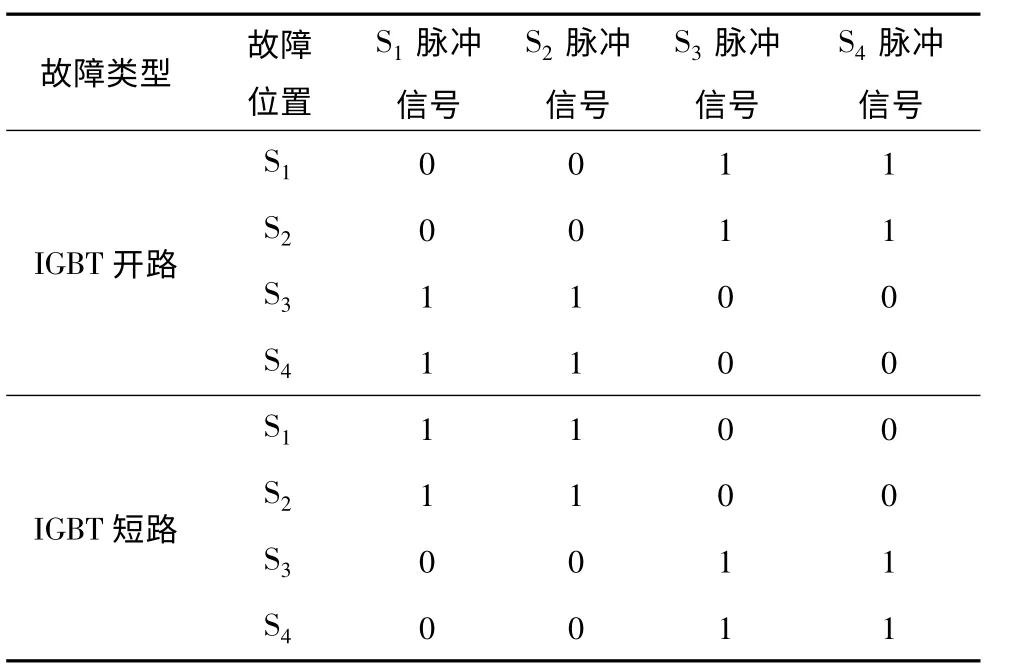
表4 故障状态下IGBT 的脉冲驱动信号Tab.4 Gate drive signals of switches under switching faults
由于级联多电平逆变器在输出串联、功率器件的故障诊断、故障模块的隔离及冗余模块的投入过程需要一定时间,因此,级联多电平逆变器从故障状态切换到容错运行状态会出现短暂的缺电现象。为了减小或消除缺电时间,应研究更为先进的故障诊断、故障隔离及故障重构方法。
2.2 旁路正常单元
当某相桥臂多个单元模块同时故障时,冗余单元无法补偿故障,导致每相桥臂的单元模块数量不同,逆变器将运行在不平衡状态。通过旁路正常相正常运行模块可以平衡三相桥臂的单元模块数量,从而在不改变调制方法的情况下使逆变器输出三相平衡电压。如图17所示的级联11 电平逆变器,图19a 为正常状态下的矢量图。当B 相桥臂1 个模块、C 相桥臂2 个模块同时故障时,其矢量图如图19b 所示,分别旁路A 相2 个和B 相1 个正常模块,此时逆变器降额运行于平衡状态。采用旁路正常单元法重构后的电压矢量图如图20a 所示,输出线电压降低了40%。采用基波相移补偿法重构后的矢量图如图20b 所示。

图19 级联11 电平逆变器的电压矢量图Fig.19 The voltage phasor diagram of 11-level cascade inverter
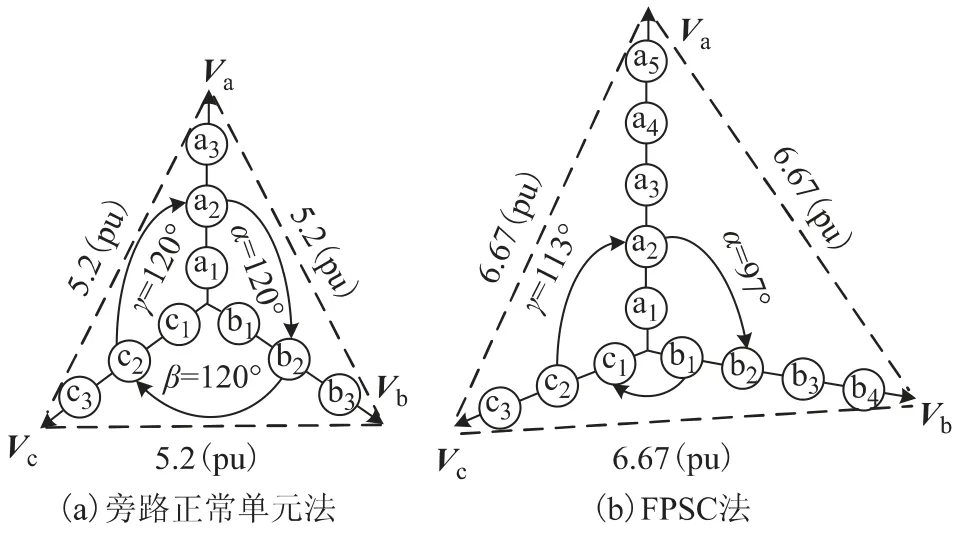
图20 级联11 电平逆变器的电压矢量图Fig.20 The voltage phasor diagram of 11-level cascade inverter
2.3 基波相移补偿方法
当逆变器由于故障而不平衡运行时,将输出三相不等幅的线电压。文献[36]提出了基波相移补偿方法(Fundamental Phase-shift Compensation,FPSC),即利用正常单元模块,通过调整三相参考电压之间的相位差,从而得到较大的平衡线电压。不同的故障下,三相之间的相位差计算如下

式中:Va、Vb、Vc分别为三相电压的幅值;α、β、γ分别为三相间的相位差。
对于一个级联11 电平的逆变器,每相桥臂含有5 个级联的单元模块。当B 相桥臂1 个模块、C 相桥臂2 个模块同时故障时,采用基波相移补偿方法调整三相电压之间的相位差,从而得到平衡的线电压,重构后的电压矢量图如图20b 所示。重构后线电压幅值从8.66(pu)降低为6.67(pu),线电压幅值仅降低了23%。
由图20a 和20b 可知,相比于旁路正常单元的容错方法,采用FPSC 方法可大大提高重构后的输出电压幅值。表5 为几种故障情况下,采用FPSC 方法重构后的线电压和线电压变化率。由表中第4 种故障情况可知,FPSC 方法并不能在所有的故障情况下都能得到最大输出线电压。
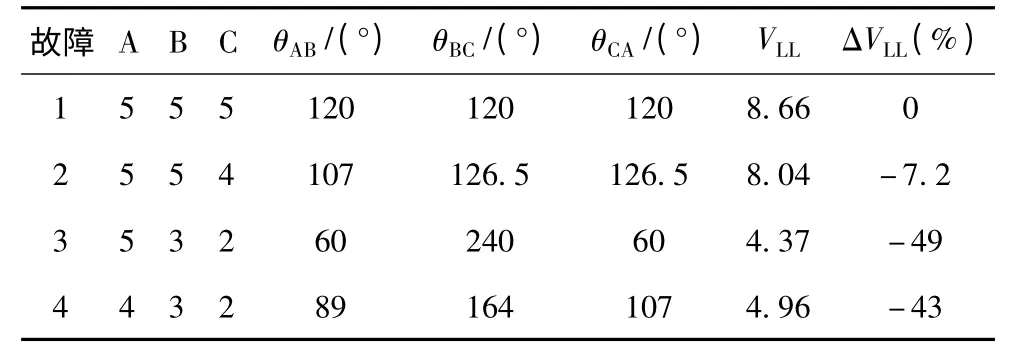
表5 级联11 电平各种故障的情况比较(FPSC 方法)Tab.5 Compensation of fault conditions of cascade 11-level inverter(FPSC method)
2.4 改进的FPSC 方法
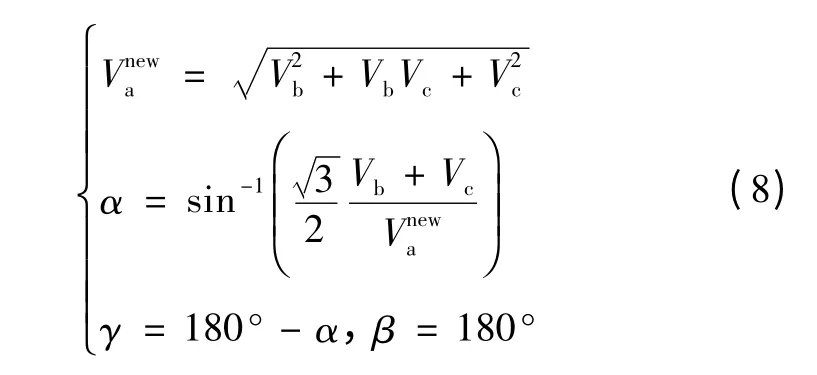
文献[37,38]提出了一种改进的FPSC 方法。将两个含有较少正常单元的桥臂之间相位差调整为180°,并相应减小另外一相的电压幅值,可得到平衡的线电压,并适合于各种故障的情况。例如A 相含有最多的正常单元,重构后A 相电压幅值和各相之间的相位差计算公式为
如表5 中第3 种故障情况,B 相3 个和C 相2 个模块同时发生故障,采用改进的FSPC 法,首先调整B 相和C 相的相位差为180°,并减小A 相的电压幅值,使逆变器输出平衡的线电压。图21a 为级联11 电平逆变器矢量示意图。图21b 和图21c 为分别采用FPSC 方法和改进的FSPC 方法重构后的电压矢量图。与FPSC 方法相比,改进的FPSC 方法使输出线电压幅值增大了15%。FPSC 方法及其改进的方法使故障重构后线电压幅值均有所降低。由于故障导致中性点发生位移,重构后的负载功率因数降低。

图21 级联11 电平逆变器的电压矢量图Fig.21 The voltage phasor diagram of 11-level cascade inverter
2.5 直流母线电压重构法
文献[39]提出直流母线电压重构的方法,增加故障相中正常模块的直流侧电压,使三相的直流侧输入电压总和保持不变,从而使重构后输出电压保持不变。例如级联7 电平逆变器C 相C2和C3模块发生故障被旁路时,调整C 相C1模块的直流侧电压值为正常值的3 倍,使逆变器直流侧输入电压总和保持不变,从而故障重构后输出电压不变。重构前后的电压相量图分别如图22a 和图22b 所示。
直流侧电压的升高将导致功率器件电压应力增大。文献[40,41]提出采用FPSC 法和直流侧电压重构法相结合的容错方法,通过增加故障相和正常相正常模块的直流侧电压值,使总输入电压值保持不变,例如C 相两个模块发生故障被旁路,调整三相之间的相角,并增大三相桥臂正常模块的直流侧电压值,使逆变器输出平衡的线电压。重构后的电压相量图如图22c所示。该改进的控制方法减小了故障相模块中功率器件的电压应力。
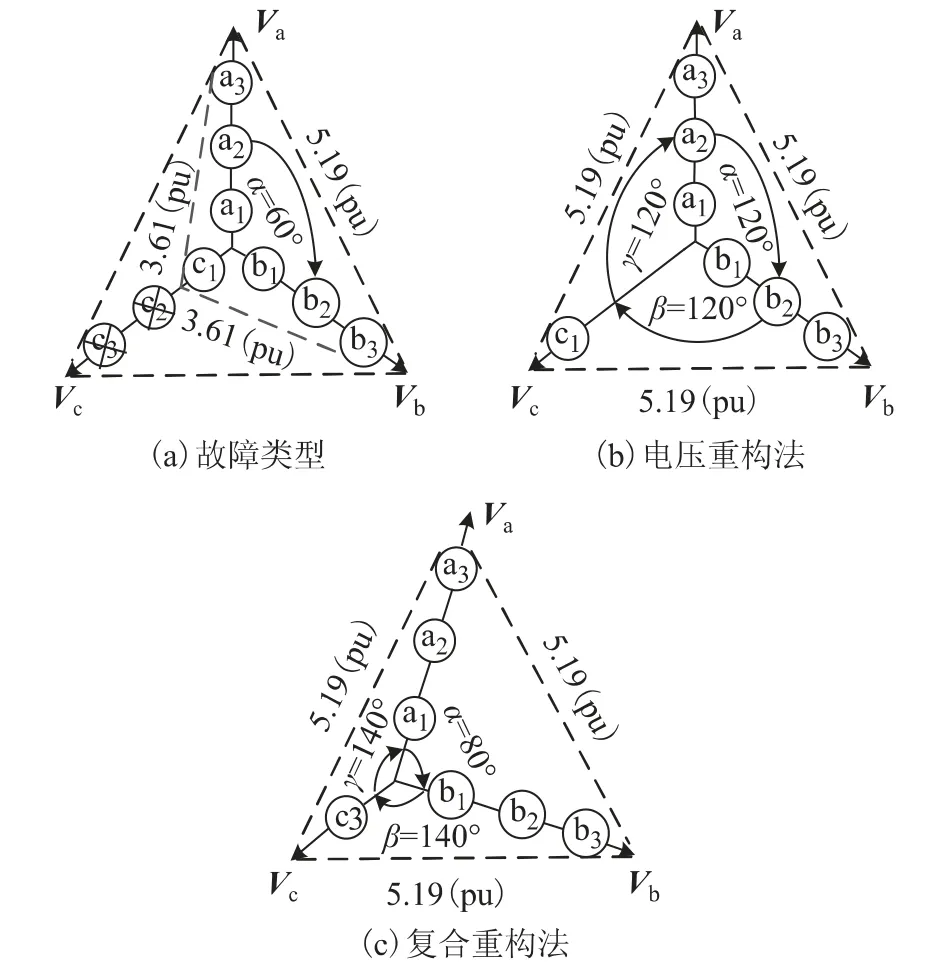
图22 级联7 电平逆变器的电压矢量图Fig.22 The voltage phasor diagram of 7-level cascade inverter
文献[42-44]介绍了应用于无功静止同步补偿装置的级联多电平逆变器容错技术。H 桥单元模块作为有源整流器控制H 桥模块的电流,用来提高系统的功率因数,改善各单元模块的直流侧电压。当检测到某一相单元模块故障时,增大该故障相正常单元模块的直流侧参考电压,使故障前后直流侧参考电压值总和不变,从而在不降低输出功率的情况下,使逆变器运行于容错状态。但故障相重构后H 桥单元模块中功率器件的电压、电流应力将会增大。
3 结论
本文主要对钳位型和级联型多电平逆变器容错拓扑及容错控制方法进行了归纳和总结。从总体上看,未来的研究趋势大致为以下几方面:
1)研究先进的故障监测和诊断方法。在可靠性要求较高的场合,当故障发生时,要求系统能够快速、准确地检测并隔离故障,同时这也是实施容错控制的前提。
2)定量分析逆变器故障容错的暂态过程,采取适当措施尽可能减少重构时间,不致引发其他故障而使系统瘫痪。
3)提出新型容错型多电平逆变器拓扑。使之可以容错单相多处功率器件故障和多相的功率器件同时故障。虽然传统多电平逆变器自身为容错运行提供了大量冗余资源,但冗余意味着成本的增加,应考虑费效比的问题,而且故障后的控制方法较为复杂。
4)采用硬件和软件相结合的技术来优化逆变器系统的容错设计。研究定量评估、分析逆变器容错设计可靠性的方法。
5)深入研究模块化多电平逆变器的容错技术。提高单元模块的可靠性,研究单元模块内部和外部相结合的容错技术,并深入分析故障容错对逆变器交流侧输出功率、直流侧电压利用率及输出电能质量的影响。
6)研究并网发电可再生能源系统逆变器的故障诊断与容错技术。目前,国内外对电机驱动系统逆变器容错技术进行了大量的理论和应用研究,取得了一定成果。并网逆变器的输入(可再生能源)和输出(电网)复杂的暂态环境使内部故障检测和容错过程变得较复杂。因此,并网发电系统中逆变器的容错技术具有广阔的理论和应用研究空间。
[1] Rodriguez J,Lai J S,Peng F Z.Multilevel inverters:A survey of topologies,controls,and applications[J].IEEE Transactions on Industrial Electronics,2002,49(4):724-738.
[2] Tolbert L M,Pang F Z,Habeleler T G.Multilevel converters for large electric drivers[J].IEEE Transactions on Industry Applications,1999,35(1):36-43.
[3] Tolbert L M,Habetler T G.Novel multilevel inverter carrier based PWM method[J].IEEE Transactions on Industry Applications,1999,35(5):1098-1107.
[4] Fuchs F W.Some diagnosis methods for voltage source inverters in variable speed drives with induction machines-a survey[C].Proceedings of the IEEE Industrial Electronics Society Annual Conference,Roanoke,Virginia,USA,2003:1378-1385.
[5] Bin L,Sharma S K.A literature review of IGBT fault diagnostic and protection methods for power inverters[J].IEEE Transactions on Industry Applications,2009,45(5):1770-1777.
[6] Rodriguez-Blanco M A,Claudio-Sanchez A,Theilliol D,et al.A failure-detection strategy for IGBT based on gate-voltage behavior applied to a motor drive system[J].IEEE Transactions on Industrial Electronics,2011,58(5):1625-1633.
[7] Fu J R,Lipo T A.A strategy to isolate the switching device fault of a current regulated motor drive[C].Proceedings of Industry Applications Society Annual Meeting,1993,2:1015-1020.
[8] Song Yantao,Wang Bingsen.Survey on reliability of power electronic systems[J].IEEE Transactions on Power Electronics,2013,28(1):591-603.
[9] Behrooz M.Survey of fault-tolerance techniques for threephase voltage source inverters[J].IEEE Transactions on Industrial Electronics,2014,61(10):5192-5202.
[10] Zhang W P,Xu D H,Enjeti P N,et al.Survey on fault-tolerant techniques for power electronic converters[J].IEEE Transactions on Power Electronics,2014,29(12):6319-6331.
[11] 赵文祥,程明,朱孝勇,等.驱动用微特电机及其控制系统的可靠性技术研究综述[J].电工技术学报,2007,22(4):38-46.
Zhao Wenxiang,Cheng Ming,Zhu Xiaoyong,et al.An overview of reliability of drive system for small and special electric machines[J].Transactions of China Electrotechnical Society,2007,22(4):38-46.
[12] 张兰红,胡育文,黄文新.三相变频驱动系统中逆变器的故障诊断与容错技术[J].电工技术学报,2004,19(12):1-10.
Zhang Lanhong,Hu Yuwen,Huang Wenxin.Fault diagnosis and tolerant techniques of inverter in threephase variable frequency drive system[J].Transactions of China Electrotechnical Society,2004,19(12):1-10.
[13] 安群涛,孙力,孙立志,等.三相逆变器开关管故障诊断方法研究进展[J].电工技术学报,2011,26(4):135-144.
An Quntao,Sun Li,Sun Lizhi,et al.Recent developments of fault diagnosis methods for switches in three-phase inverters[J].Transactions of China Electrotechnical Society,2011,26(4):135-144.
[14] Spee R,Wallace A K.Remedial strategies for brushless DC drive failures[C].Proceedings of Industry Applications Society Annual Meeting,Pittsburgh,PA,USA,1988,1:493-499.
[15] Liu T H,Fu J R,Lipo T A.A strategy for improving reliability of field oriented controlled induction motor drives[C].Conference Record of the 1991 IEEE Industry Applications Society Annual Meeting,Dearborn,MI,USA,1991,1:449-455.
[16] Sinha G,Hochgraf C,Lasseter R H,et al.Fault protection in a multilevel inverter implementation of a static condenser[C].Conference Record of the 1995 IEEE Industry Applications Conference,Orlando,FL,1995,3:2557-2564.
[17] Li Shengming,Xu Longya.Fault-tolerant operation of a 150 kW 3-level neutral-point-clamped PWM inverter in a flywheel energy storage system[C].Conference Record of the 2001 IEEE Industry Applications Conference,Chicago,IL,USA,2001,1:585-588.
[18] Li S,and Xu L.Strategies of fault tolerant operation for three-level PWM inverters[J].IEEE Transactions on Power Electronics,2006,21(4):933-940.
[19] Farnesi S,Fazio P,Marchesoni M.A new fault tolerant NPC converter system for high power induction motor drives[C].2011 IEEE International Symposium on Diagnostics for Electric Machines,Bologna,2011:337-343.
[20] Bruckner T,Bernet S,Guldner H.The active NPC converter and its loss-balancing control[J].IEEE Transactions on Industrial Electronics,2005,52(3):855-868.
[21] Li J,Huang A Q,Bhattacharya S,et al.Three-level active neutral point clamped(ANPC)converter with fault tolerant ability[C].Twenty-Fourth Annual IEEE Applied Power Electronics Conference and Exposition,Washington,DC,2009:840-845.
[22] Ceballos S,Pou J,Gabiola I,et al.Fault-tolerant multilevel converter topology[C].IEEE International Symposium on Industrial Eletronics,Montreal,Canada,2006:1577-1582.
[23] Ceballos S,Pou J,Zaragoza J,et al.Efficient modulation technique for a four-leg fault-tolerant neutralpoint-clamped inverter[J].IEEE Transactions on Industrial Electronics,2008,55(3):1067-1074.
[24] Kao Xiaomin,Corzine K A,Familiant Y L.A unique fault-tolerant design for flying capacitor multilevel inverter[J].IEEE Transactions on Power Electronics,2004,19(4):979-987.
[25] Ceballos S,Pou J,Robles E,et al.Performance evaluation of fault-tolerant neutral-point-clamped converters[J].IEEE Transactions on Industrial Electronics,2010,57(8):2709-2718.
[26] Ceballos S,Pou J,Robles E,et al.Three-level converter topologies with switch breakdown fault-tolerance capability[J].IEEE Transactions on Industrial Electronics,2008,55(3):982-995.
[27] Pou J,Zaragoza J,Rodríguez P,et al.Fast-processing modulation strategy for the neutral-point-clamped converter with total elimination of the low-frequencyvoltage oscillations in the neutral point[J].IEEE Transactions on Industrial Electronics,2007,54(4):2288-2294.
[28] Ceballos S,Pou J,Zaragoza J,et al.Fault-tolerant neutral-point clamped converter solutions based on including a fourth resonant leg[J].IEEE Transactions on Industrial Electronics,2011,58(6):2293-2303.
[29] Ceballos S,Pou J,Zaragoza J,et al.Soft-switching topology for a fault-tolerant neutral-point-clamped converter[C].IEEE International Symposium on Industrial Electronics,Vigo,Spain,2007:3186-3191.
[30] Ceballos S,Pou J,Robles E,et al.Fault-tolerant hybrid four-leg multilevel converter[C].European Conference on Power Electronics and Applications,Aalborg,Denmark,2007:1-9.
[31] Ceballos S,Pou J,Robles E,et al.Three-level converter topologies with switch breakdown fault-tolerance capability[J].IEEE Transactions on Industrial Electronics,2008,55(3):982-995.
[32] Araujo R L,Jacobina C B,Cabral da Silva E D,et al.Fault-tolerant voltage-fed PWM inverter AC motor drive systems[J].IEEE Transactions on Industrial Electronics,2004,51(2):439-446.
[33] Bolognani S,Zordan M,Zigliotto M.Experimental fault-tolerant control of a PMSM drive[J].IEEE Transactions on Industrial Electronics,2000,47(5):1134-1141.
[34] Welchko B A,Lipo T A,Jahns T M,et al.Fault tolerant three-phase AC motor drive topologies:A comparison of features,cost,and limitations[J].IEEE Transactions Power Electronics,2004,19(4):1108-1116.
[35] Song W C,Huang A Q.Control strategy for faulttolerant cascaded multilevel converter based STATCOM[C].The 22nd Annual IEEE Applied Power Electronics Conference,Anaheim,CA,USA,2007:1073-1076.
[36] Hammond P W.Enhancing the reliability of modular medium-voltage drives[J].IEEE Transactions on Industrial Electronics,2002,49(5):948-954.
[37] Lezana P,Ortiz G.Extended operation of cascade multicell converters under fault condition[J].IEEE Transactions on Industrial Electronics,2009,56(7):2697-2703.
[38] Correa P,Pacas M,Rodriguez J.Modulation strategies for fault-tolerant operation of H-bridge multilevel inverters[C].IEEE International Symposium on Industrial Electronics,Montreal,Que,2006,2:1589-1594.
[39] Song W C,Huang A Q.Fault-tolerant design and control strategy for cascaded H-bridge multilevel converter-based STATCOM[J].IEEE Transactions on Industrial Electronics,2010,57(8):2700-2708.
[40] Maharjan L,Yamagishi T,Akagi H,et al.Faulttolerant operation of a battery-energy-storage system based on a multilevel cascade PWM converter with star configuration[J].IEEE Transactions on Power Electronics,2010,25(9):2386-2396.
[41] Lezana P,Pou J,Meynard,T A,et al.Survey on fault operation on multilevel inverters[J].IEEE Transactions on Industrial Electronics,2010,57(7):2207-2218.
[42] Cheng Y,Qian C,Crow M L,et al.A comparison of diode-clamped and cascaded multilevel converters for a STATCOM with energy storage[J].IEEE Transactions on Industrial Electronics,2006,53(5):1512-1521.
[43] Liu Y,Huang A Q,Tan G J,et al.Control strategy improving fault ride-through capability of cascade multilevel inverter based STATCOM[C].Industry Applications society Annual Meeting,Edmonton,Alta,2008:1-6.
[44] Akagi H,Fujita H,Yonetani S,et al.A 6.6 kV transformerless STATCOM based on a five-level diodeclamped PWM converter:System design and experimentation of a 200 V 10 kVA laboratory model[J].IEEE Transactions on Industry Applications,2008,44(2):672-680.
猜你喜欢
自动化与仪表(2018年7期)2018-07-31
中国实用神经疾病杂志(2018年9期)2018-05-25
电测与仪表(2016年20期)2016-04-11
通信电源技术(2016年4期)2016-04-04
电气传动(2015年4期)2015-07-11
电测与仪表(2015年4期)2015-04-12
电测与仪表(2015年5期)2015-04-09
电测与仪表(2015年2期)2015-04-09
电源学报(2015年6期)2015-02-18
中国医药导报(2015年20期)2015-01-11