轮毂电机驱动装甲车辆“驾驶员-综合控制器”在环实时仿真
2015-06-15 19:11张运银马晓军刘春光廖自力
装甲兵工程学院学报 2015年3期
张运银, 马晓军, 刘春光, 廖自力
(装甲兵工程学院控制工程系, 北京 100072)
轮毂电机驱动装甲车辆“驾驶员-综合控制器”在环实时仿真
张运银, 马晓军, 刘春光, 廖自力
(装甲兵工程学院控制工程系, 北京 100072)
为验证轮毂电机驱动装甲车辆控制方案的可行性,在仿真系统中引入真实的驾驶员操纵输入,构建了“驾驶员-综合控制器-电机驱动系统-车辆动力学”整车闭环控制系统,并建立了基于横摆转矩控制的轮毂电机驱动装甲车辆控制模型,实现了各驱动电机驱动转矩的合理分配。采用真实的车辆综合控制器,与 RT-LAB仿真平台中建立的驱动电机模型和Vortex仿真平台构建的车辆动力学仿真系统共同组成 “驾驶员-综合控制器”在环实时仿真系统,并在此基础上开展了真实驾驶员操控下整车动力性能实时仿真,验证了实车综合控制器控制算法的可靠性,同时分析了车辆动力性能。
电传动;实时仿真;硬件在环;横摆转矩控制
采用轮毂电机驱动是实现车辆电传动的重要手段。目前,基于轮毂电机驱动的4轮独立驱动电动汽车技术发展迅速,且关于其经济性及行驶稳定性控制方面的研究较多[1-4]。然而,对8轮独立驱动控制车辆的相关研究极少,国内只有部分类似方案的简单动力学仿真[5],国外也只有简单的方案介绍。对相关的电传动车辆进行研究时,通常采用离线仿真的方法建立整车的动力学模型及综合控制系统,仿真运行环境理想化,强调整车的控制效果,同时采用简单的电机外特性曲线模拟驱动电机性能,忽略了驱动电机仿真模型精度对整车动力性能的影响[6-7]。与离线仿真相比,硬件在环实时仿真采用真实的车辆综合控制器,且结合真实的驾驶员操纵设备,不仅能极大地提高仿真的可靠性,还能进一步对实车综合控制器软硬件系统展开测试[8-9]。因此,采用硬件在环实时仿真是进行轮毂电机驱动装甲车辆行驶控制研究的有效手段。
笔者以4轴车辆单轨模型为基础进行车辆动力学参考模型的解算,设计了基于横摆转矩控制的轮毂电机驱动装甲车辆行驶控制方案。同时,基于RT-LAB和Vortex仿真平台,构建了轮毂电机驱动装甲车辆“驾驶员-综合控制器”在环联合实时仿真平台,并在此平台上开展了真实驾驶员操纵下的整车动力性能实时仿真,对实车综合控制器控制方案进行了测试。
1 驱动系统建模
1.1 轮毂电机驱动装甲车辆总体结构
轮毂电机驱动装甲车辆的总体结构如图1所示,其中:8个车轮均为轮毂电机驱动的电动轮,且各个电动轮之间无机械连接,可实现独立驱动控制,8个轮毂电机为相同的永磁同步电动机。
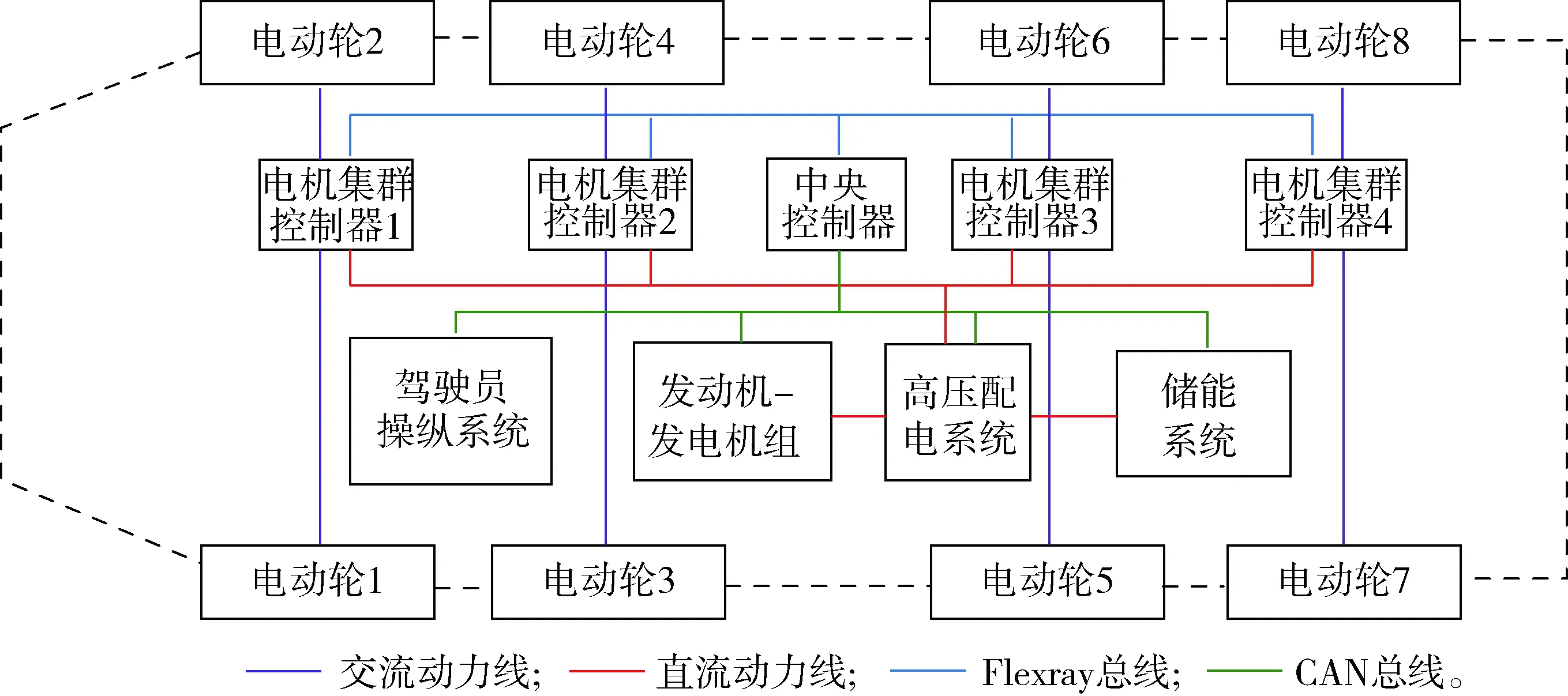
图1 轮毂电机驱动装甲车辆总体结构
1.2 基于横摆转矩控制的车辆驱动系统模型
轮毂电机驱动装甲车辆实现了功率的柔性传递,车辆综合控制器直接通过总线将控制指令传输到轮毂驱动电机,调节两侧电机的转矩输出,产生车辆需求的横摆力矩,以改变装甲车辆的转向半径,提高轮式装甲车辆的转向能力。
笔者设计的8×8轮毂电机驱动装甲车辆整车驱动系统结构如图2所示。
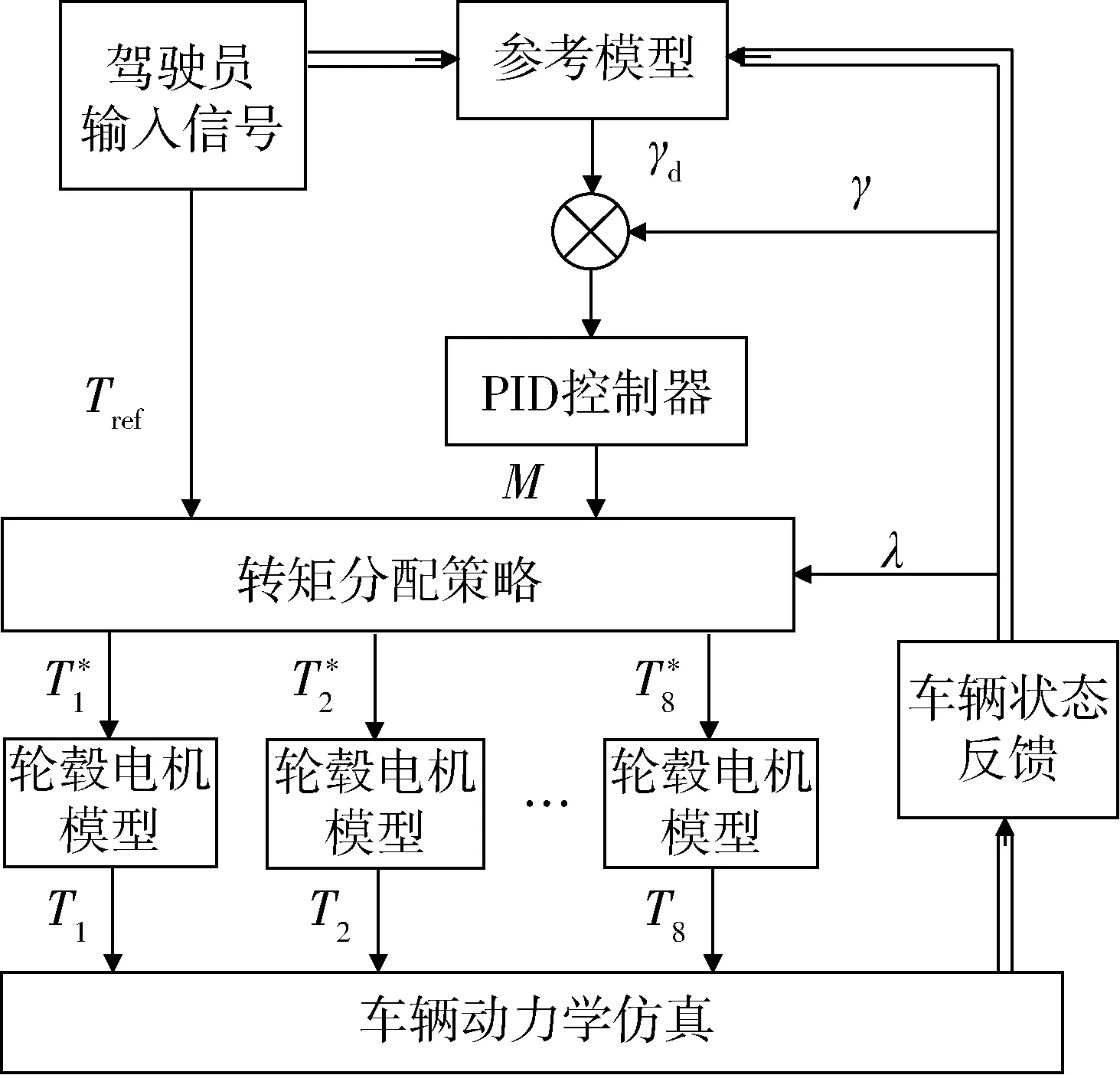
图2 8×8轮毂电机驱动装甲车辆整车驱动系统结构

1.3 4轴车辆参考横摆角速度计算
忽略车辆的侧倾运动和俯仰运动,则车辆的运动可看作具有集中质量的刚体平面运动[10-12]。可选取4轴车辆单轨模型作为驾驶员参考模型,如图3所示。
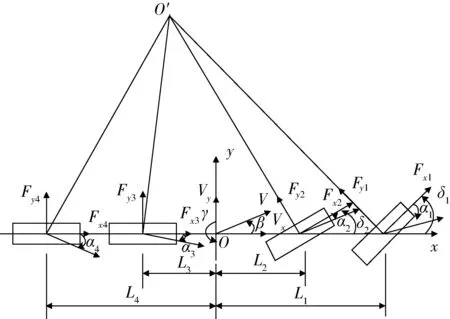
图3 4轴车辆单轨模型
其中:侧向力平衡方程为
(1)
绕z轴力矩平衡方程为
Fy2cosδ2)-L3Fy3-L4Fy4+M。
(2)
式中:Vx为车辆纵向速度;Vy为车辆横向速度;Fxj、Fyj(j=1,2,3,4)分别为第j轴轮子的纵向力和横向力;β为质心侧偏角;δj为第j轴轮胎转向角;m为整车质量;Iz为绕质心的转动惯量;Lj为第j轴距离车辆质心坐标系y轴的距离。
轮胎横向力Fyj的计算公式为
Fyj=f(αj)=Cjαj,
(3)
式中:Cj为第j轴车轮侧偏刚度;αj为第j轴车轮侧偏角。
轮胎侧偏角αj、横摆角速度β与转向角δj存在如下关系[13]:
(4)

(5)
式中:

由线性叠加原理可知:
(6)
由式(6)可得到理论横摆角速度γref为

(7)
同时,受附着系数影响,不同路面状况下的轮胎侧向力必须满足[14]

(8)

(9)
1.4 转矩分配控制策略
在理想状态下,驱动力平均分配于各个车轮;但在路况较差时,车辆各轮负载变化较大且各不相同,极易发生滑转或滑移情况,严重影响车辆的控制性能。因此,有必要根据车辆运行状态,实时调整各驱动轮的转矩输出。本文主要进行以下3个层次的转矩调整。
第五届世界互联网大会日前在乌镇如期开幕,来自世界各地的人们在感受互联网经济魅力的同时,也再次认识中国、共享美好、勾画未来。
1) 根据油门踏板/制动踏板信号计算车辆总需求转矩,并初步平均分配于各个驱动轮。驾驶员对驱动电机的总需求转矩Tref可表示为
(10)
式中:η∈[0,1],为油门开度;n为电机的转速;Ti_max(ni)为电机在转速ni时的最大输出扭矩。
每个驱动轮的转矩给定为
(11)
2) 将期望的横摆转矩平均分配于每个驱动轮。横摆转矩M由γd与γ之差进行PI控制:
M=kp(γ-γd)+ki∫(γ-γd) dt。
(12)
式中:kp和ki分别为比例系数和积分系数。
左、右侧的各个驱动轮转矩给定调整如下:
(13)
3) 根据车辆各驱动轮滑移/滑转情况,减小已滑移/滑转驱动轮的转矩给定。为保证车辆总体驱动力不降低并且横摆转矩不变,将转矩减小量平均分配于同侧其他驱动轮。已滑移/滑转驱动轮转矩调整量ΔT为
(14)
式中:λopt为当前路面最佳滑移/滑转率;Tyaw为驱动轮转矩。则非滑转/滑移驱动轮给定转矩Tu为
Tu=Tyaw+ΔT/N,
(15)
式中:N为滑转/滑移驱动轮个数。
2 硬件在环实时仿真平台
2.1 仿真平台的总体结构
轮毂电机驱动装甲车辆“驾驶员-综合控制器”硬件在环实时仿真平台总体结构如图4所示。其中:1)驾驶员模拟操作平台为一套罗技的游戏操控系统以及自研的真实车辆驾驶员控制盒,主要用于驾驶员操控信号采集及传递;2)综合控制器以TMS28335型DSP为主控芯片,带有数字信号接口、模拟信号、CAN总线接口以及FlexRay接口,主要进行既定车辆行驶控制策略的解算;3)RT-LAB仿真平台用于进行轮毂电机及其驱动控制系统仿真,电机模型采用真实的电机实验数据拟合;4)基于Vortex仿真平台进行车辆动力学实时仿真,将RT-LAB仿真平台计算的真实电机转矩给定经过相应的效率折算后,直接加载到车辆模型的轮胎上;5)基于dSPACE仿真平台的状态参数监控系统,实时显示系统运行参数。
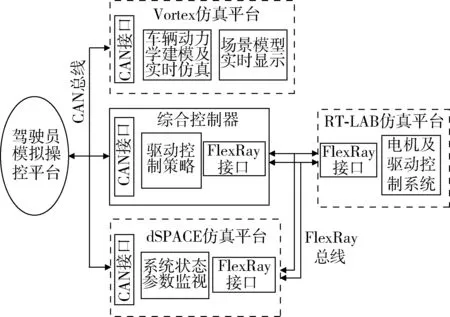
图4 硬件在环实时仿真平台总体结构
2.2 仿真平台通讯系统及工作原理
轮毂电机驱动装甲车辆“驾驶员-综合控制器”硬件在环实时仿真平台通讯网络及主要信号流向如图5所示。可知: 此通讯网络按照整车控制性能需求,同时采用CAN总线和FlexRay总线,以满足不同控制对象的通讯实时性要求。具体工作原理为:1)综合控制器根据车辆运行状态及驾驶员控制指令,按照既定的控制算法解算出各电机的转矩给定,并传递给RT-LAB仿真平台;2)RT-LAB仿真平台根据转矩给定及实际转速反馈,解算出实际电机转矩输出;3) Vortex仿真平台将该转矩输出直接加载到车辆各驱动轮,进行车辆实时动力学仿真,并反馈车辆状态[15]。
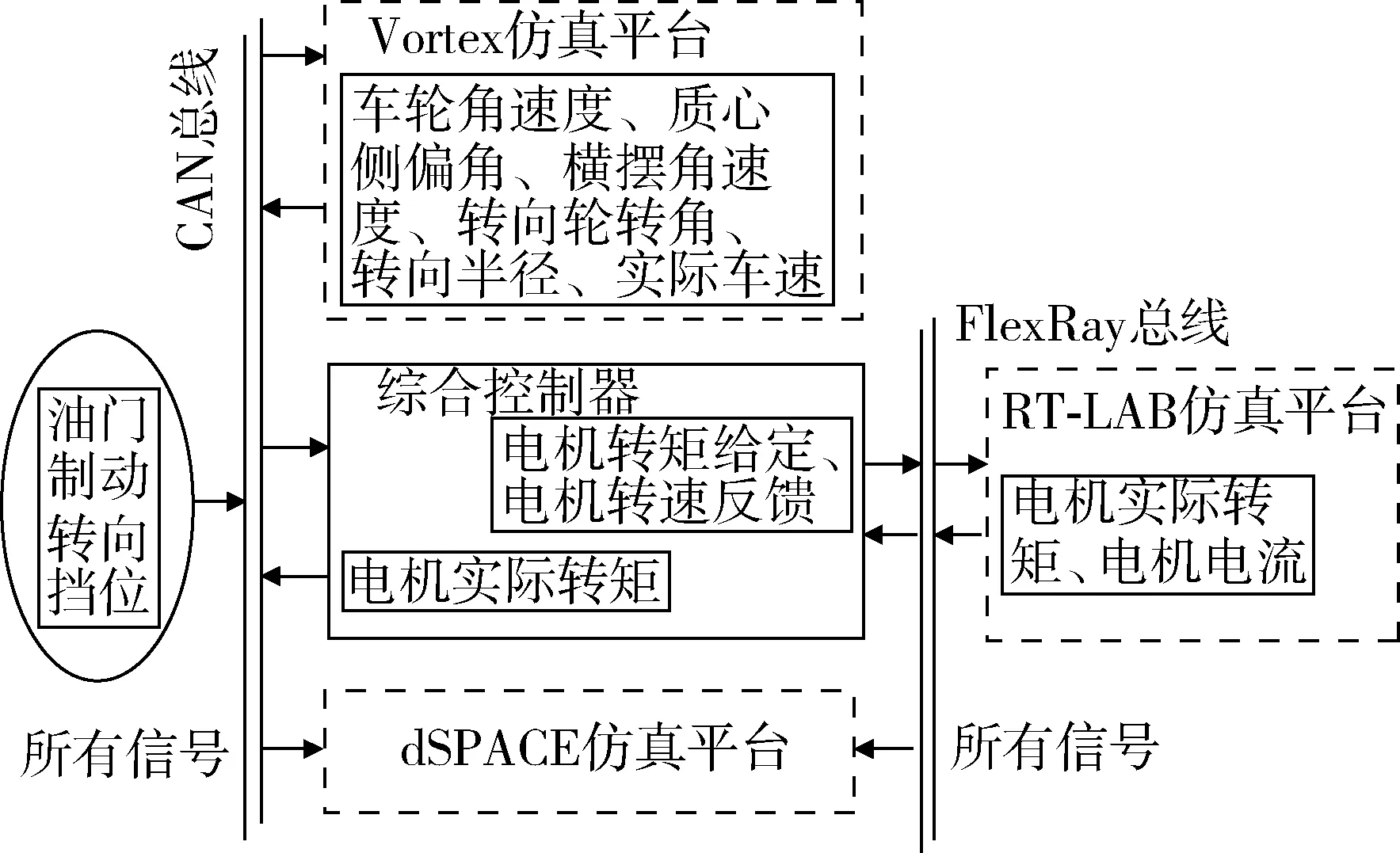
图5 硬件在环实时仿真平台通讯网络及主要信号流向
3 实时仿真验证
轮毂电机驱动装甲车辆“驾驶员-综合控制器”硬件在环实时仿真平台能在考虑驾驶员输入影响的条件下,对不同动力学控制算法进行测试与验证,进而可以评价不同控制策略下的整车性能。
图6为车辆分别在良好、湿滑路面连续进行加速、转向及制动操作时的仿真结果。仿真总时长设定为80 s,前40 s为良好路面,后40 s为湿滑路面。由图6可知:驾驶员在2种路面上的操作命令一致,且车速变化趋势与操作命令相对应;输出转矩随着车速(电机转速)的增加而降低,总体符合电机输出特性。其原因如下:1)初始加速阶段,在湿滑路面多个车轮发生滑转,车辆的驱动防滑控制迅速调节各驱动轮转速,导致初始输出转矩发生多次跳变,而在良好路面只有个别驱动轮发生滑转;2)转向阶段,随着转向盘输入增加,横摆转矩控制发挥作用,左右两侧驱动轮输出转矩出现差值,外侧转矩不断增加,内侧转矩不断减小,在转向盘输入信号较大时,内侧驱动轮输出负转矩,而在湿滑路面,由于转向车速较高,转向开始时,有部分车轮发生滑转,转向盘回正后,电机输出转矩迅速恢复到一致状态;3)制动阶段,由于在湿滑路面多个车轮发生滑移,因而转矩调节波动大。
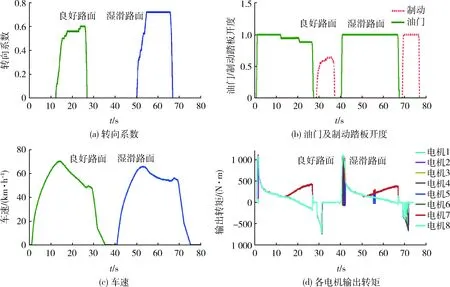
图6 车辆分别在良好、湿滑路面连续进行加速、转向及制动操作时的仿真结果
图7为车辆连续过壕沟和垂直崖壁时的仿真结果。由图7(a)可知:整个仿真过程中,油门开度保持在0.8左右。由图7(b)可知:1)车辆开始处于加速阶段,在7 s左右过壕沟时,车辆增速变缓慢,通过壕沟后,车辆增速加快;2)在17 s时,车辆遭遇垂直崖壁,车速迅速降低,通过垂直崖壁后,车速又迅速增加。由图7(c)可知:1)在过壕沟时,驱动轮由前至后先后悬空,因而转矩输出先后调整;2)在爬垂直崖壁时,车辆因碰撞崖壁被阻挡前进,车速迅速减小,各驱动轮滑转运行,转矩调节变化大;3)当车头抬高爬上崖壁时,中间车轮悬空,稍后崖壁上车轮悬空。因而,整个过程中各驱动轮输出防滑控制调整持续时间长,调整频繁。
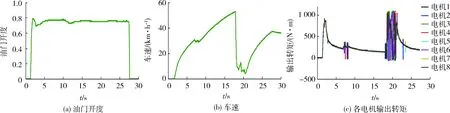
图7 车辆连续过壕沟和垂直崖壁时的仿真结果
4 结论
笔者基于RT-LAB和Vortex仿真平台构建了轮毂电机驱动装甲车辆“驾驶员-综合控制器”硬件在环实时仿真系统,8轮独立驱动控制仿真实验表明:横摆转矩控制能有效调节两侧转矩分配,产生横摆转矩,提高车辆的转向性能;驱动防滑控制能有效抑制车轮悬空状态下的空转现象,仿真结果符合预期的控制目标。采用硬件在环仿真能够快速、准确地验证综合控制器控制策略及算法的有效性,为轮毂电机驱动装甲车辆控制策略及算法代码开发奠定基础。下一步将提高各仿真分系统的模型精度,同时完善整车综合控制策略。
[1] 邹广才,罗禹贡,李克强. 四轮独立电驱动车辆全轮纵向力优化分配方法[J]. 清华大学学报:自然科学版,2009,49(5):719-722.
[2] Wei L, Hai Y, McGee R ,et al. Vehicle Pure Yaw Moment Control Using Differential Tire Slip[C]∥Proceedings of 2009 American Control Conference. MO: Hyatt Regency Riverfront,2009:3331-3336.
[3] Zhu T J, Zong C F. Research on Control Algorithm for DYC and Integrated Control with 4WS[C]∥Proceedings of International Conference on Computational Intelligence and Natural Computing. Wuhan:IEEE, 2009: 166-169.
[4] 张缓缓. 采用电动轮驱动的电动汽车转矩协调控制研究[D].长春:吉林大学,2009.
[5] 刘明春,张承宁,王志福.8×8轮毂电机全轮驱动车辆动力学建模与仿真[J].北京理工大学学报,2014,34(2):143-147.
[6] 李波,张承宁,李军求.基于RecurDyn和Simulink的电传动车
辆转矩控制策略[J].农业机械学报,2009,40(7):1-5.
[7] 黄千,黄英,张付军,等. 电传动装甲车辆混合动力总成的联合仿真[J].兵工学报,2008,29(1):11-14.
[8] 邹渊,孙逢春,张承宁.电传动履带车辆“驾驶员-综合控制器”在环的双侧驱动控制实时仿真[J].机械工程学报,2007,43(3):193-197.
[9] 张承宁,吴静波,邹渊,等.带式混合动力车辆控制策略硬件在环仿真[J]. 机械工程学报,2009,29(9):790-794.
[10] Mizushimal T, Raksincharoensak P, Nagai M. Direct Yaw-moment Control Adapted to Driver Behavior Recognition[C]∥Proceedings of SICE-ICASE International Joint Conference. Busan: ICASE, 2006:534-539.
[11] 赵艳娥, 张建武. 基于滑模控制的四轮驱动电动汽车稳定性控制[J]. 上海交通大学学报,2009, 43(10):1526-1530.
[12] 余卓平,姜炜,张立军. 四轮轮毂电机驱动电动汽车扭矩分配控制[J]. 同济大学学报,2008, 36(8):1115-1119.
[13] 付皓. 汽车电子稳定性系统质心侧偏角估计与控制策略研究[D].长春:吉林大学, 2008.
[14] 邹广才, 罗禹贡, 李克强. 基于全轮纵向力优化分配的4WD车辆直接横摆力矩控制[J]. 农业机械学报,2009,40(5):1-6.
[15] 李学军,张玲霞,马玉晶.基于dSPACE半实物仿真平台设计[J].长春大学学报,2011,21(6):4-6.
(责任编辑: 尚菲菲)
Driver-integrated Controller In-loop Real-time Simulation of In-wheel Motor Driving Armored Vehicles
ZHANG Yun-yin, MA Xiao-jun, LIU Chun-guang, LIAO Zi-li
(Department of Control Engineering, Academy of Armored Force Engineering, Beijing 100072, China)
To validate the feasibility of control scheme for in-wheel motor driving armored vehicles, the driver′s real operating input is introduced into the simulation system, and a closed-loop control system including driver, integrated controller, motor driving system and vehicle dynamics system is established. For the rational torque distribution of every driven motor, the in-wheel motor driving armored vehicle controlling model is built based on yaw torque control theory. The driven motor model built by RT-LAB and the vehicle dynamics simulation system built in Vortex make up the driver-integrated controller in-loop real-time simulation system with real integrated controller. Vehicle dynamic performance with real driver input is simulated based on this simulation system,the real vehicle integrated controller’s algorithm is verified to be reliable and the vehicle power performance is analyzed and evaluated.
electric drive; real-time simulation; hardware-in-loop; yaw torque control
1672-1497(2015)03-0032-05
2015-03-09
军队科研计划项目
张运银(1987-),男,博士研究生。
TJ81+0.323; TP391.9
A
10.3969/j.issn.1672-1497.2015.03.007
猜你喜欢
汽车实用技术(2022年5期)2022-04-02
汽车实用技术(2022年5期)2022-04-02
汽车维修与保养(2021年12期)2021-03-08
汽车实用技术(2021年3期)2021-02-24
中国新技术新产品(2020年4期)2020-05-05
山东工业技术(2017年19期)2017-09-27
科技创新导报(2016年27期)2017-03-14
价值工程(2016年36期)2017-01-11
中小企业管理与科技·下旬刊(2016年10期)2016-11-18
汽车与驾驶维修(汽车版)(2015年8期)2015-03-25