
某型号周视镜总体设计技术分析
2015-06-09 22:46宋克洲赵臣俊魏前岗高向民张永奇付攀龙
应用光学 2015年6期
宋克洲,何 波,赵臣俊,魏前岗,高向民,张永奇,付攀龙
(1.中国兵器工业集团光电集团 河南平原光电有限公司,河南 焦作 454001;2.中国人民解放军驻二五八厂军事代表室,河南 焦作 454001)
某型号周视镜总体设计技术分析
宋克洲1,何 波1,赵臣俊2,魏前岗1,高向民1,张永奇1,付攀龙1
(1.中国兵器工业集团光电集团 河南平原光电有限公司,河南 焦作 454001;2.中国人民解放军驻二五八厂军事代表室,河南 焦作 454001)
为了扩大观察范围,模块化结构单元,提高可靠性,设计了一款多功能周视镜。利用滚珠丝杠和直线轴承实现头部升降,扩大产品的观察范围;利用齿轮组差动技术实现上反射镜运动传输,保证系统可靠性;利用步进电机驱动道威棱镜及配合绝对值式光电编码器反馈角值位置信息,消除周视过程中的图像旋转,保证系统观瞄和测角精度。实验结果表明:周视镜可昼夜观瞄、昼间3×~6×连续变焦、头部升降300 mm、方位向全周视、测角精度在连续转动下不低于±1 mard。
光学仪器;周视镜;总体设计;头部升降
引言
近年来,周视镜在军事上的应用越来越广泛,功能越来越强大。在坦克装甲车辆中,周视镜作为司乘人员观察战场环境的重要仪器,已由最初具有简单昼间观瞄功能的光学仪器,发展到现今的集昼、夜(或热像)观察、测角、激光测距、上反稳像[1]、自动跟踪等技术为一体的高科技光电集成仪器;从最初的仅供车长观察使用,发展到当今车长炮长共用。为适应新形势下作战需求,针对某型防空导弹武器系统指挥车,设计一款具有周视、昼夜观瞄、头部升降、昼间连续变倍、测角、视频输出[2]等功能的周视镜。
1 设计原理
周视镜为潜望式结构,由上反光镜、物镜、下反光镜和目镜等组成。光线经上反光镜反射进入竖直的物镜中,再经下反光镜反射进入目镜,供人眼观察。上反光镜绕竖轴(竖直的物镜中心)转动,即可观察四周环境。按光学原理,上反光镜转动后,经目镜看到的物像会发生倾斜现象,需引入道威棱镜,严格按1∶2的关系,跟随上光镜按相同或相反方向(相同方向或相反方向,需根据光路中光的反射次数而定)转动,以消除图像倾斜。
2 设计过程
2.1 设计指标
周视镜的主要技术指标有:
a) 放大倍率
昼间:3×~6×连续变倍;夜间:7×。
b) 视场
昼间:3×时20°,6×时10°;夜间:7°。
c) 夜视距离
在无月晴朗星光条件下((1~3)×10-3lx),透空观察,可识别800 m处的目标(2.3 m×4.6 m的标准靶)。
d) 测角范围及精度
俯仰测角范围为-10°~30°,精度不低于±2 mard;方向测角范围为0°~360°,精度不低于±2 mard。
e) 头部升降
头部要能升高和降低,潜望高在900 mm~1 200 mm范围内可变。
2.2 系统组成和工作原理
周视镜具有昼间观瞄系统、夜间观瞄系统、视频输出系统、测角系统、电气控制系统和升降系统等。按结构组成上划分,周视镜有头部和中镜体2个组件。头部中的上反光镜起到折转光路作用,外界环境的光线经上反光镜反射进入竖直的共用物镜中,然后,进入昼间的变倍组件或者夜间的夜视镜组,二者由昼夜转换机构驱动,实现昼夜状态转换;光线进一步前进,进入道威棱镜,经分光棱镜分光,一部分光能进入CCD器件,产生视频信号,另一部分进入目镜,供人眼观看。周视镜的光学系统图见图1所示。
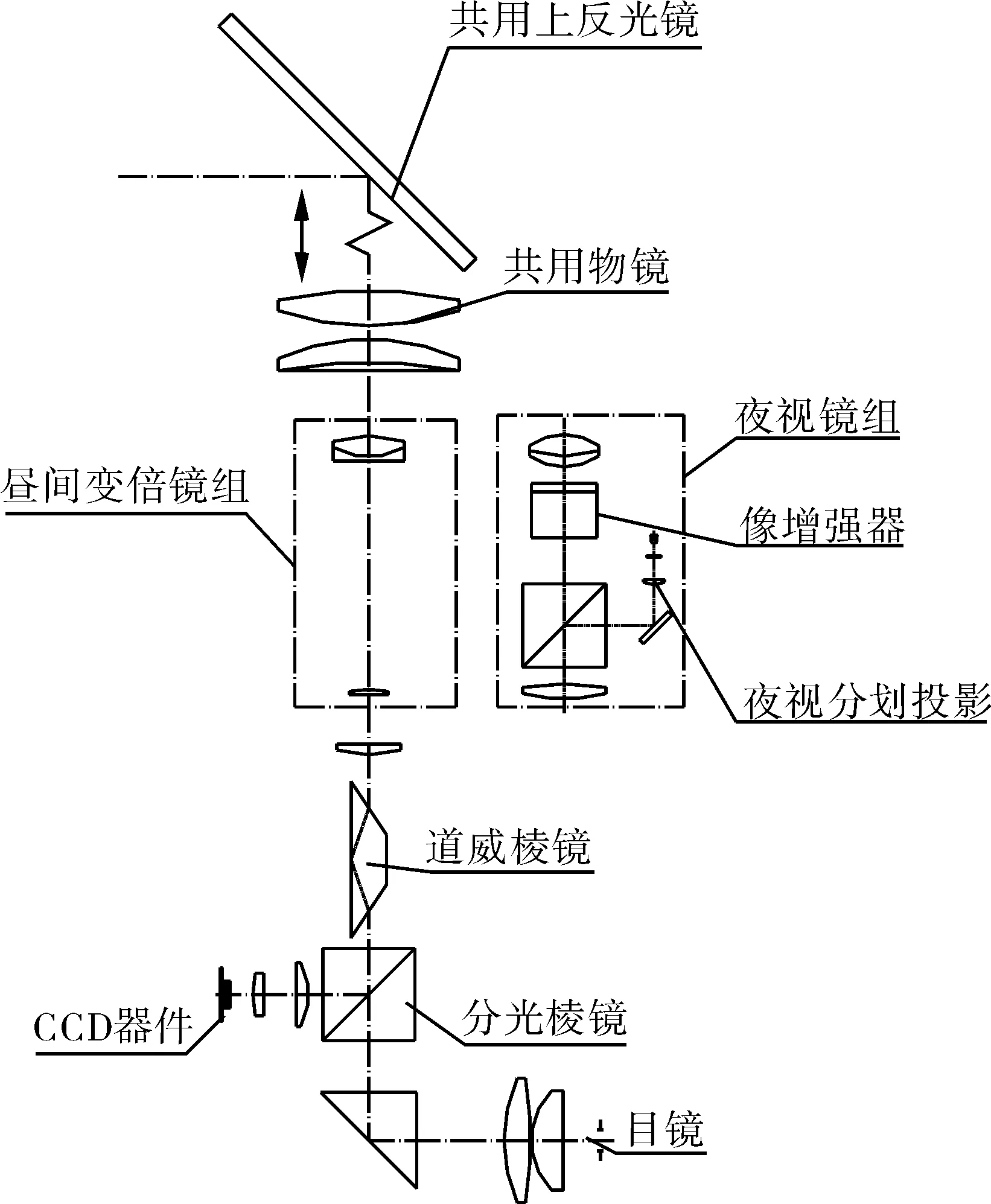
图1 光学系统图 Fig.1 Diagram of optical system
2.3 总体布置
周视镜电气控制部分布置在周视镜内部的合适位置,集成为一个总体,从上往下安装,中镜体上部外缘凸出部分是装车接合盘,与指挥车顶甲板之间用螺栓固定。中镜体和头部之间通过导柱连接,升降系统可驱动导柱升降使头部升降;用可伸缩的橡胶筒连接头部和中镜体,保障头部升起后外部与内腔的封闭。头部主要包括上反射镜组件、差动齿轮组件、驱动组件以及连接盘和锁定机构等。上反光镜以外的光学系统、升降机构、昼夜转换机构、电气控制系统等均布置在中镜体中。总体设计结构图如图2所示。
2.4 头部设计
头部的设计要实现周视、俯仰、测角和自锁功能。周视齿轮、俯仰齿轮和轴承等构成差动齿轮组件,用螺钉固定于上反射镜组件本体上。驱动组件负责周视和俯仰的2个驱动电机,分别与差动齿轮组中的周视齿轮和俯仰齿轮啮合,将运动传递给周视运动机构和俯仰运动机构,实现周视、俯仰旋转功能。差动齿轮组的应用,使在没有导电滑环的情况下,上反光镜的俯仰动作得以实现。
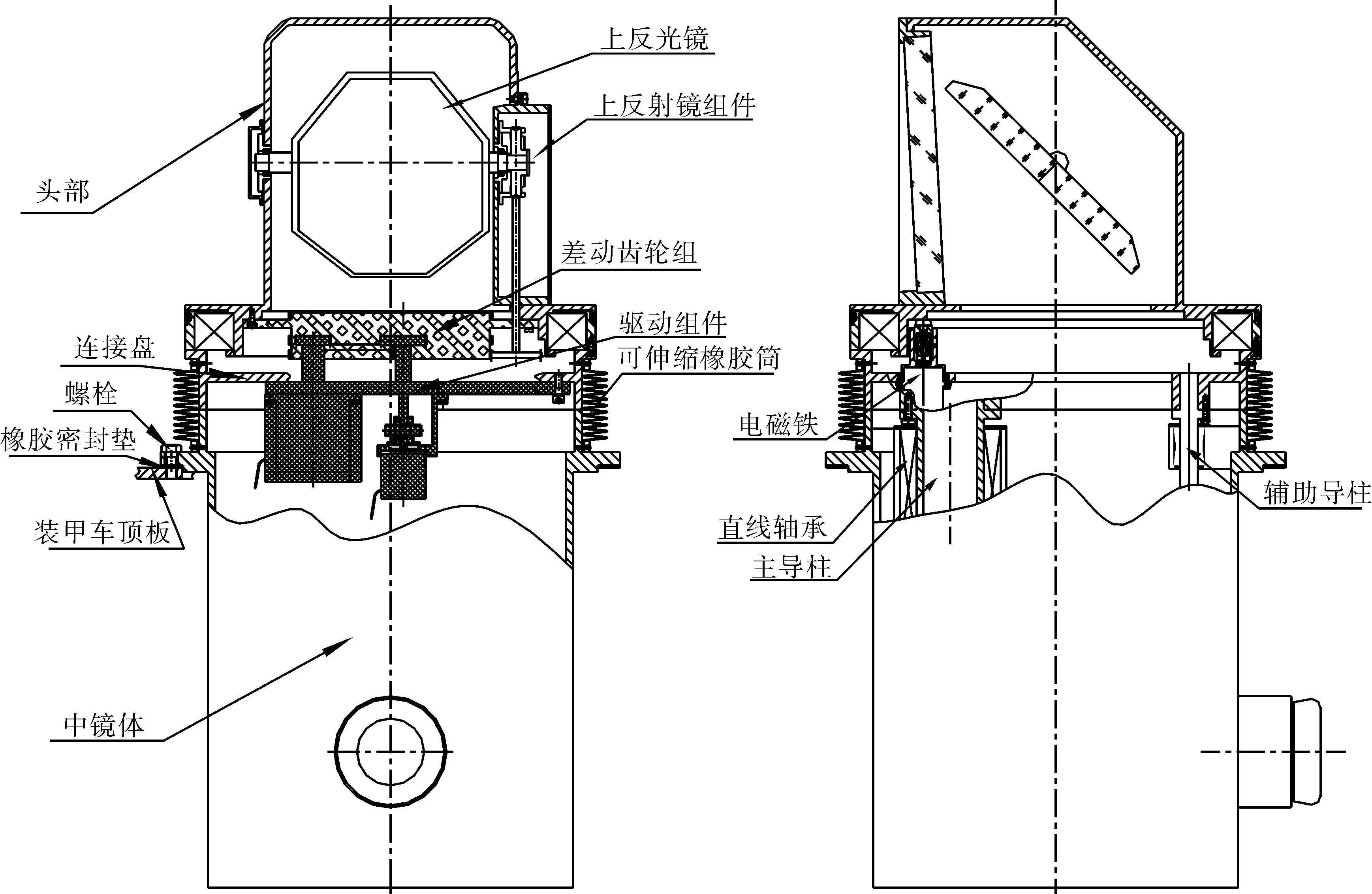
图2 总体结构图Fig.2 Diagram of overall structure
周视齿轮和俯仰齿轮上分别啮合有绝对值式光电编码器,一方面实现测角功能,另一方面,其输出信号给电气控制模块,与道威棱镜啮合的绝对值式光电编码器信号比较,确定道威棱镜是否转动,以消除图像旋转。
为了保证在断电状态下头部处于固定位置,连接盘上装有电磁铁,设计有与之联动的锁定机构。产品工作时,电磁铁通电,锁紧机构中的销钉在电磁铁的作用下被拉出定位孔,头部可正常转动;非工作时,销钉在弹簧的作用下弹出,进入对应的定位孔中,锁紧头部。关机时,当扳下电源开关后,电气控制系统启动关机复位程序,检测头部是否在规定的零位,若不在,则驱动周视电机运动使头部向零位转动,锁紧销钉对准定位孔,电气控制系统检测到头部归零后,给出一低电平信号,通过继电器切断电磁铁电源,电磁铁的衔铁释放,带动销钉释放,锁紧头部,然后将整个系统的电源切断。
2.5 消像旋机构设计
消像旋机构主要由道威棱镜组件和电气控制系统组成。道威棱镜组件和头部上各装有一个绝对值式光电编码器,电气控制系统在开机自检时,检测2个编码器输出的角值信息,当发现有差值时,输出修正值给伺服驱动系统,驱动道威棱镜到正确位置;周视运动时,伺服驱动系统驱动头部和道威棱镜转动,同时电气控制系统检测2个编码器数值,判断是否严格按1∶2关系转动,若存在误差,则输出修正值,加快或减慢道威棱镜转动。该消像旋机构没有机械齿轮副的传动,道威棱镜和头部之间用电信号实现同步,用电气闭环返馈控制精度,实现模块化设计。
2.6 升降机构设计
升降机构由主导柱、从动导柱、滚珠丝杠、减整机构、驱动电机等组成,主导柱与滚珠丝杠的螺母固连,驱动电机通过减速机构、锥齿轮副驱动丝杠旋转,进一步驱动螺母上下运动,带动主导柱上下运动,实现头部升降。从动导柱的作用是负责保持方向。
在升高到顶部和降到底部时,有限位触发开关,当触发开关被触动后,信号传递到电气控制系统,输出控制信号断开电机电源。
为减小磨擦阻力,导柱与本体之间装入直线轴承;采用滚珠丝杠,与传统的T型螺纹螺旋丝杠相比,摩擦力大大减小。
2.6.1 主导柱刚度计算
主导柱是周视镜实现头部升降[4]功能的关键部件。为了保证头部升起后系统稳定、工作可靠[5],主导柱必须有足够的刚度和强度,保证在头部升高后,因弹性变形引起的测量误差在可接收的范围内。
周视360°旋转时,因主导柱弹性变形引起的测量误差,按不大于测角精度公差的1/10设计,即不大于±0.2 mard。
升降机构属单推杆类。主导柱设计为中空式结构,外径φ60 mm,内径φ48 mm,其距产品光轴中心120 mm,偏心承重机构头部组件质量不大于20 kg,重力模型分析图见图3。优化设计连接盘结构可忽略其自身变形,只考虑头部升起后,主导柱在偏心力P的作用下产生的变形角θ。根据力线平移定理[6],头部质量对主导柱的作用力可简化为集中力P′和力偶M0,力学模型如图4所示。按悬臂梁在简单载荷作用下的变形进一步简化,力学模型如图5所示。变形角[7]为
(1)
将各参数(D=60 mm、d=48 mm、P=196 N、E=2×1011Pa)代入(1)式中可计算出θ=0.094 mrad。
可见,主导柱的刚度满足测角精度要求。
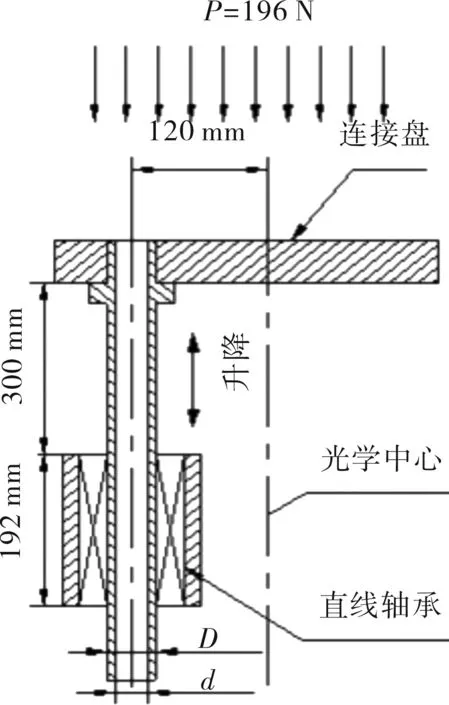
图3 头部重力分析模型图Fig.3 Gravity analysis model diagram of head
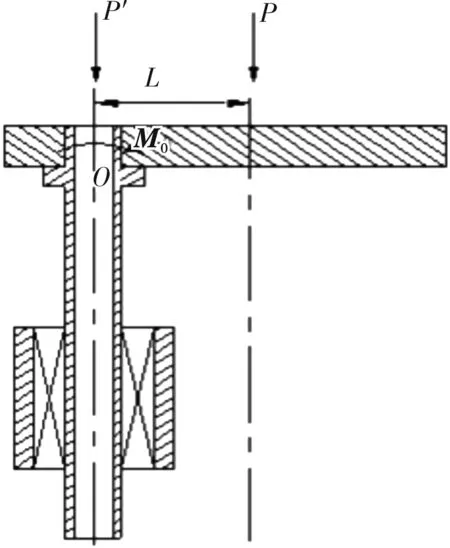
图4 头部力学模型图Fig.4 Mechanical model diagram of head
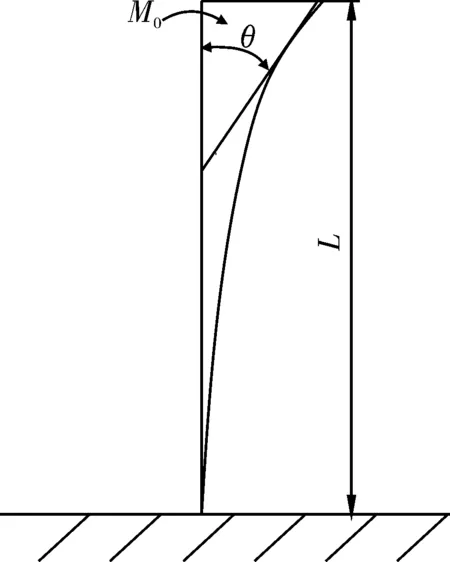
图5 简化力学模型图Fig.5 Simplified mechanical model diagram
2.6.2 驱动系统计算和伺服电机选型
计算电机功率能否满足头部升高需要的功率。首先计算头部升高需要克服的阻力矩(扭矩),滚珠丝杠直径为32 mm,中径为d2=28 mm,导程s=5 mm,于是扭矩:
式中:Fa为轴向载荷;η为滚珠螺旋传动效率;将Fa(196 N)、η(0.93)数值代入上式,可计算出:
Mt=168 N·mm=0.168 N·m
伺服电机与螺旋丝杠之间有两级减速机构传动,比例为1∶10。考虑磨擦阻力、传递效率、短时运行、降额设计等因素,伺服电机选用某型号的无刷直流电机,额定电压24 V时额定转矩为0.033 6 N·m,可满足头部升高需要的扭矩。
2.7 昼夜转换机构及变倍机构设计
采用手动整体式转换,切换昼间的变倍组件与夜视的微光组件。机构主要由包含昼间变倍组件和夜视微光组件的旋转组件、支架、扇形定位条、扇形齿条、扭簧定位器、手轮等。
安装在旋转组件上的扇形定位条,其上有2个卡槽,分别对应昼夜2个位置。安装在本体上的扭簧定位器,在扭簧的扭力作用下卡入卡槽,实现定位;在旋转组件上安装扇形齿条,设计有齿轮与之啮合,齿轮轴引出到本体外,通过手轮转动,实现转换。
连续变倍机构采用常规的螺旋线套筒形式,通过电机驱动齿轮副进一步驱动螺旋线套筒转动,带动变倍镜组中的运动镜组按光学系统要求的曲线运动。
2.8 密封设计
分析周视镜的特点,使用时要求头部升降,升降过程中内腔与外界有气体交换。在密封性设计时,综合考虑以上因素,一方面将光学零部件设计成局部密封,另一方面周视转动时的滑动接合面采用常规的O型密圈加毛毡浸油密封,配置大容量的硅胶干燥剂。在使用时,除定期给周视镜内部充高纯度氮气外,在湿度较大的天气条件下,升降后要马上充氮气干燥内腔。
可伸缩橡胶筒,用耐物候胶料氯丁胶加上特定胶料成份,按一定配比做成耐老化胶,一方面可增加其使用年限,另一方面可使密封性、强度、韧性得到加强。
3 试验验证
周视镜工程样机制造完毕后,在通用光具座上测量了昼夜倍率,用视场仪测量了昼夜视场,用精密测角仪测量测角范围和精度,用米尺测量了头部升降尺寸,在野外,测量了夜视距离。
a) 放大倍率
昼间:2.8×~6.2×连续变倍,夜间:7.1×。
b) 视场
昼间:3×时 21°,6×时 10°; 夜间:7.1°。
c) 夜视距离
在无月晴朗星光条件下((1~3)×10-3lx),透空观察依维柯车正面,在900 m处仍可清晰识别。
d) 测角范围及精度
俯仰范围为-11°~11°,精度不低于±1 mard;方向测角范围为0°~360°多圈可连续转动,精度不低于±1 mard。
e) 头部升降
周视镜头部可升高300 mm,实现潜望高从900 mm到1 200 mm变化,用时30 s。
按照军用仪器对工作环境的要求,进行高温、低温、冲击、振动试验,试验后,复检以上指标,没有变化。
4 结论
本文设计了一款应用于某防空导弹武器系统营指挥车的周视镜。用滚珠丝杠和直线轴承设计的升降机构,在头部升高300 mm后周视时,指挥车顶置空调室外机不再遮挡观察外界环境。依据差动齿轮组的周视运动传动,省去了导电滑环;用步进电机驱动道威棱镜,配合绝对值式光电编码器反馈角值位置信息,消除周视过程中的图像旋转,使产品装校模块化。经验证,各项战技指标和功能达到使用要求。
[1] Chen Wenjian,Liang Qingqian,Jiang Xiaocun.Design of stabilized panoramic sight with inertial navigation[J].Journal of Applied Optics, 2007,28(5):573-575. 陈文建,梁庆仟,蒋萧村.稳瞄惯导周视观瞄镜的设计[J].应用光学,2007,28(5):573-575.
[2]WuMingdi.TechnologyanalysisofaddingCCDcameratogunner’speriscopic[J].JournalofAppliedOptics, 2006, 27(5):405-408. 吴鸣镝.稳瞄炮长镜加装CCD摄像机技术分析[J].应用光学, 2006, 27(5):405-408.
[3]ZhangXuangtao.Themachinedesignofremovingimagerotationinthepanoramicsight[D].Nanjing:NanjingUniversityofScienceandTechnology,2011. 张轩涛. 周视光路中的消像旋机构设计[D].南京:南京理工大学,2011.
[4]FanChunhua,YangHongjiang,SuBo.Thedesignandrealizationofthepanoramicstabilizedandelevatedsightintankarmoredvehicles[J].Vehicle&PowerTechnology, 2006(3):42-46. 范春华,杨红江,苏波.坦克装甲车辆升降式周视稳定观察镜的设计与实现[J].车辆与动力技术,2006(3):42-46.
[5]ChenZhaobing,WangBing,ChenNing,etal.Analysisofoverallaccuracyofmast-mountedphotodetectionsystem[J].ActaArmamentanrh, 2013,34(4):507-512. 陈兆兵,王兵,陈宁,等.桅杆型光电探测系统总体精度分析[J].兵工学报,2013,34(4):507-512.
[6]HaoTongsheng.Theoreticalmechanics[M].Beijing:HigherEducationPress,1965. 郝桐生.理论力学[M].北京:高等教育出版社,1965.
[7]LiangMingzhi,Qiukan,LuYaohong.Mechanicsofmaterials[M].Beijing:HigherEducationPress,1963. 梁治明,丘侃,陆耀洪.材料力学[M]. 北京:高等教育出版社,1963.
[8]PrecisioninstrumentdepartmentofTianjinUniversitydepartmentofprecisionmachinery.Precisionmachineryelements[M].Tianjin:HigherEducationPress,1979. 天津大学精仪系精密机械教研室.精密机械零件[M]. 北京:高等教育出版社,1979.
[9]ChenYan,LiDecai.Designandexperimentsformagneticfluidsealoftankpanoramicmirror[J].ActaArmamentanrh,2011,32(11):1428-1432. 陈燕,李德才.坦克周视镜磁性液体密封的设计与实验研究[J].兵工学报,2011,32(11):1428-1432.
[10]LiuTonggang,YangZhiyin.Designoptimizationofsealstructureofliquidsealingbymagneticfluids[J].Tribology,2003,23(4):353-355. 刘同冈 杨志伊.磁流体液体动密封结构的优化设计[J].摩擦学学报, 2003,23(4):353-355.
Technical analysis on overall design of XXX panoramic sight
Song Kezhou1, He Bo1,Zhao Chenjun2,Wei Qiangang1,Gao Xiangmin1,Zhang Yongqi1,Fu Panlong1
(1.Henan Pingyuan Optics &Electronics Co., Ltd,China North Industries Group Corporation, Jiaozuo 454001,China; 2.PLA Military Representative at No. 258 Factory, Jiaozuo 454001,China)
In order to enlarge the observation range,adopt the module units and raise the reliability, a multi-functional panoramic sight was designed. By using ballscrew and linear bearing, the lifting at its head was realized so that the observation range of the product could be enlarged. By using gear cluster differential technology, the moving transmission of the mirror was realized so as to guarantee the system reliability. Through driving the Dove prism with a step motor and the cooperation with the absolute value type photoelectric encoder to feedback the angular value position information, the image revolving during panoramic sighting was eliminated, so that the system observation and aiming accuracy and the angle-measuring accuracy could be guaranteed. Engineering practice shows that the panoramic sight can perform the following actions: observation & aiming day and night, zooming continuously 3×~6×at day, 300 mm lifting at its head, all panoramic sighting in azimuth, the angle-measuring accuracy is no less than ±1 mard during continuous rotation.
optical instrument; panoramic sight; overall design;lifting at head
1002-2082(2015)06-0841-06
2015-01-27;
2015-06-25
宋克洲(1966-),男,河南焦作人,高级工程师,主要从事军用光学仪器总体设计技术工作。
E-mail:songkz668@163.com.
TN202
A
10.5768/JAO201536.0601004
猜你喜欢
诗歌月刊(2022年2期)2022-03-15
环境科学研究(2020年1期)2020-02-07
客车技术与研究(2019年2期)2019-04-17
航天电子对抗(2018年3期)2018-07-14
航天电子对抗(2018年6期)2018-03-04
汽车实用技术(2017年6期)2017-04-25
汽车电器(2017年1期)2017-02-27
第二课堂(课外活动版)(2015年3期)2015-10-21
雷达学报(2014年4期)2014-04-23
火控雷达技术(2012年4期)2012-09-30
