基于大功率超声测量的机车车辆静态限界快速自动检测方法
2015-06-07 10:47吴俭民王庆贤金顺利
仪表技术与传感器 2015年2期
吴俭民,王庆贤,金顺利
(1.兰州交通大学自动化与电气工程学院,甘肃兰州 730070;2.国网武威供电公司,甘肃武威 733000)
基于大功率超声测量的机车车辆静态限界快速自动检测方法
吴俭民1,王庆贤1,金顺利2
(1.兰州交通大学自动化与电气工程学院,甘肃兰州 730070;2.国网武威供电公司,甘肃武威 733000)
机车静态限界是保证机车安全运行的基本条件,针对现有的接触式检测手段操作复杂、效率低等问题,基于自动化检测的要求,设计一种采用大功率超声波传感器测距的机车限界检测系统。介绍了检测原理,并根据系统的结构组成,给出了对应的校正公式,保证了测量结果的精度。系统测量过程简单,测量精度高,实现了自动化测量的目标,满足机车车辆静态限界检测的要求。
静态限界;机车车辆;自动测量;大功率超声波
0 引言
近年来,随着社会经济的不断进步,我国的铁路运输系统也在高速发展,这对铁路运输的安全性与可靠性提出了更高的要求。尤其对于高速铁路,更快的速度和更重的载荷对机车车辆的制造提出了更高的要求[1]。铁路限界是保证铁路安全运营的重要标准之一,直接关系到机车车辆在线路上安全运行[2]。铁路限界可分为机车车辆限界和建筑物接近限界,机车车辆限界则是一个垂直于线路中心线的横断面轮廓,是在进行机车车辆设计、制造以及运用过程中的基本参数。当机车车辆在沿轨道线的直线或曲线上运行到最大可能偏移位置并停留时,车辆最外轮廓各点所形成的净空称为机车车辆在直线或曲线上的静态限界[3]。
目前常采用接触式铁路机车车辆静态限界规[4]对铁路机车车辆的外形轮廓进行测量,一次测量需要4~5名工作人员,且存在许多问题,如测量累积误差大、效率低、受人为因素等的影响。随着目前各种高精度、高效率的非接触式检测手段的广泛成功应用,考虑将传统的接触式测量替换为快速、精确的非接触式限界测量。本文提出了一种采用大功率超声波作为测距手段[5]的机车车辆静态限界非接触式测量系统,为铁路机车车辆的静态限界测量提供了一种经济而有效的解决方案。
1 检测系统的组成与检测原理
1.1 检测系统的组成
考虑到在检测过程中,主要检测目标为机车车辆上部限界,所以设置龙门框架围绕机车车体,框架上传感器布置示意图如图1所示。

图1 机车静态限界测量系统示意图
系统由计算机、3个测距传感器、3个伺服电机以及相应的辅助运动的导轨、相关支撑框架以及全部的软件系统组成。测距传感器用于测量传感器安装点到车体轮廓表面的距离;支撑框架用来支撑辅助运动的导轨;伺服电机控制测距传感器沿导轨运动,进而完成对整个车身的全部检测,可通过相应的单片机记录相应的位移;计算机承担最终的数据处理,并以三维图形的方式直观地反映测量结果。
1.2 检测系统的检测原理
根据机车车辆静态限界标准规定,建立轨道中心坐标系如图2所示。其中,Y轴为机车行进方向;X轴为轨平面切线,垂直于Y轴;Z轴为XOY平面的法线,三者交与轨道中心。

图2 轨道中心坐标系
假设图1中2号传感器在轨道中心坐标系下的坐标为(x20,y20,z20),若辅助运动的长、短导轨的位移分别为l长、l短,则有被测点在轨道中心坐标系下的坐标为(x,y,z)为
(1)
在检测过程中,控制伺服电机,使其沿辅助运动的轨道扫描整个机车轮廓。同时,记录伺服电机在不同位置时,测距传感器测得的距离值,为了使测量结果精确,需要尽可能多地采集原始数据,对于机车车体的明显转折处,更要注意扫描密度。通过串口将3个传感器得到的原始数据传给主机,由主机融合分析后,计算绘制出检测机车的轮廓线,并与当前车型的限界标准比较,从而判断得出,被检测机车是否发生超限。系统工作流程如图3所示。

图3 系统工作流程图
1.3 检测系统传感器的选择
常用的超声波传感器中的换能器的一般由压电晶体(电致伸缩)制成,受其材料的影响,超声波的发射功率一般不会很大,造成反射回波的信号强度太低从而不容易被检测到或者因为大的发射角而得到比实际距离短的数值,从而导致测距失败。系统选用URM06-RS485大功率超声波测距模块测量车体到传感器安装点的实际距离,URM06-RS485超声波测距模块的技术规格如下所示:
(1)平时电流为16 mA,发射时瞬间电流为2 A;
(2)工作电压为6~12 V,工作温度为-10~+70 ℃,测量范围为20 cm~10 m,螺纹安装;
(3)工作频率为49.5 kHz,探头方向角为15°(-6 dB);
(4)接口方式RS485。
2 系统校准与侵界判断
2.1 系统校准
由系统结构可知,系统中包含多个测距传感器,每个传感器负责车体一部分轮廓线与传感器安装点一维距离的测量,所以需要将多个传感器测得的一维距离统一于轨道中心坐标系内,从而保证测量精度。如图4所示,由郭寅、刘常杰[6]等人所做的工作可以得知,设图1中2号超声波测距传感器的起始坐标为(x0,y0,z0),长、短运动导轨及测量声波的矢量分别为(i长,j长,k长)、(i短,j短,k短)、(i测,j测,k测),当长、短导轨分别产生l长、l短的位移时,超声波测距传感器测得值为l测。其中,l长、l短可由单片机记录伺服电机运动而得到,则被测点的坐标系可表示为下式:
(1)
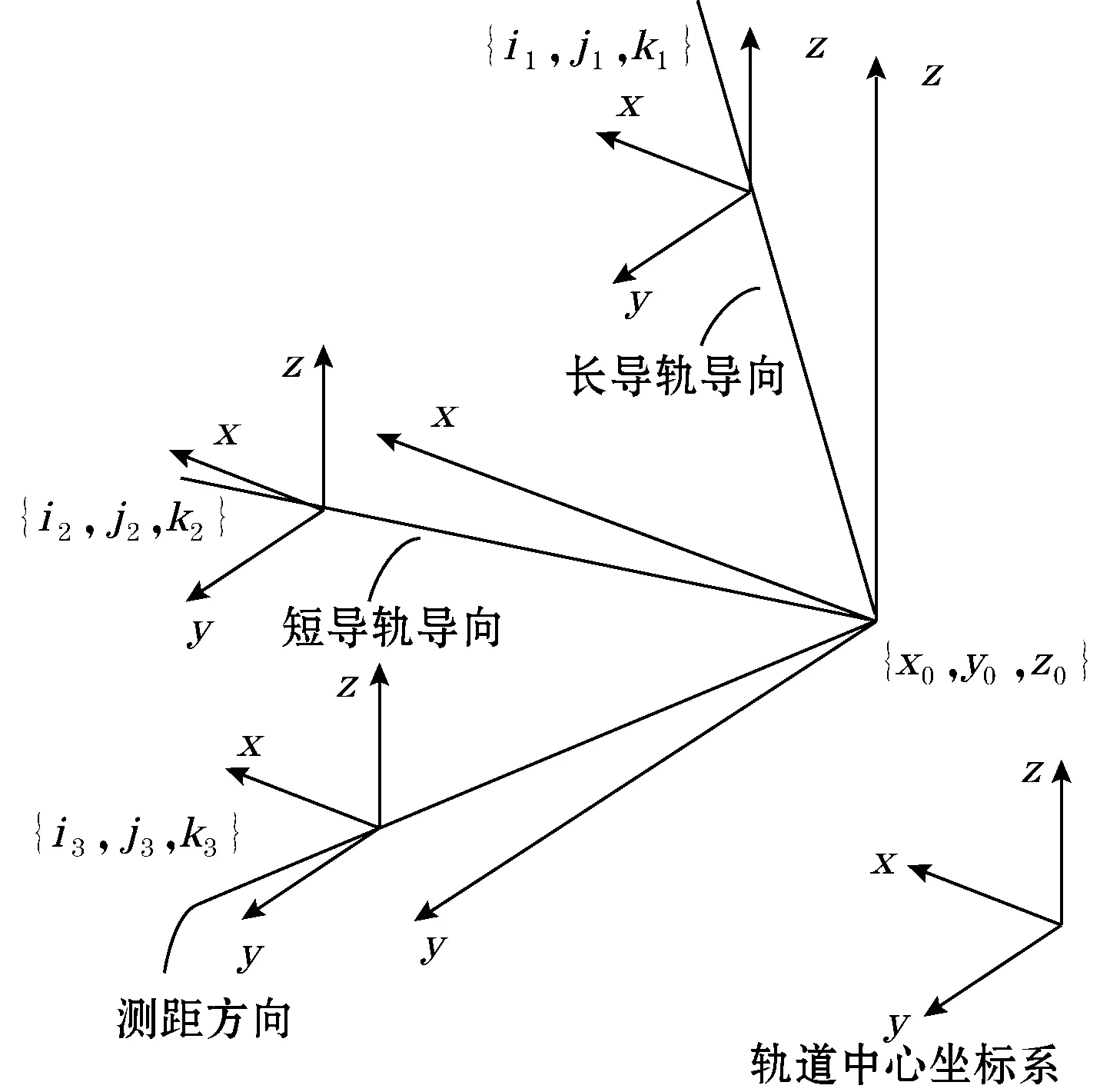
图4 系统校准计算示意图
2.2 侵界判断
根据段培勇等人[7]的研究成果,可以将判断机车限界是否侵界等同于判断轨道中心坐标系下某断面中有没有扫描点处于限界标准内,由于铁路机车限界标准是一个封闭的曲线,可以采用水平射线算法[8],通过求解该点的水平线与多边形各边的交点个数来判断是否有侵界发生。图5为射线判别算法示意图。假设图5中闭合曲线为机车静态限界,A、B分别为检测到的车辆轮廓线的点,图5中A点在机车限界内,未发生侵界,作水平射线与闭合曲线的交点只有一个;,图5中B点在机车限界允许外,发生侵界,作水平射线与闭合曲线的交点不等于一个,同时可根据射线方向与交点个数判断得出侵界点究竟位于机车的什么位置。

图5 射线判别算法示意图
3 检测系统的实现
检测系统除了需要按照图1中所示布置龙门框架外,还有相应的软件实现过程,软件系统除了包括超声波测距、伺服电机的控制等下位机程序外,还包括检测系统的上位机程序,主要功能为数据通信、数据融合、数据存储与读取等。
3.1 超声波测距
系统中超声波测距的主要任务为完成传感器到车体轮廓表面距离的测量,系统以STC89C51单片机为核心控制芯片,程序采用单片机C语言[9]编写。单片机与上位机采用RS232串口方式完成数据通信。超声波测距流程如图6所示。

图6 超声波测距流程图
超声波测距传感器安装固定于短运动导轨上,由伺服电机运动控制,完成对车体全部轮廓线的扫描。伺服电机也称执行电机,受输入的的脉冲信号控制、并且响应速度很快。检测系统选用全数字永磁交流伺服电机CSMS及其驱动系统,功率为1.2 kW.
3.2 串口通信
检测系统中共有3个用以控制伺服电机和超声波传感器测距的单片机,都选用9针串口方式(RS232)与上位机通信。LabVIEW中具有串行通信方式的的相关控件,只需设置好相应的波特率、数据位、奇偶校验位、停止位即可。通信程序截图如图7所示。
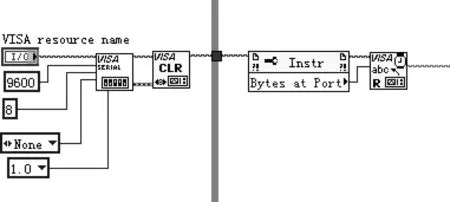
图7 串口通信程序截图
3.3 检测系统的操作界面
系统通过基于LabVIEW编程的上位机软件程序实现机车车辆横断面轮廓测量的自动化控制。LabVIEW由美国国家仪器(NI)公司研制开发,使用图形化编辑语言G编写程序,具有界面友好、直观,便于操作等优点[10]。检测系统上位机软件系统包括:数据通讯模块、主控模块、超限警告模块、数据存储与读取模块,检测系统界面如图8所示。

图8 机车车辆静态限界检测界面
4 结果分析
系统设计完成后,首先对各传感器进行重复性精度试验,试验结果表明,传感器实验测量误差小于5 mm,满足铁路机车车辆静态限界检测的要求。图8右侧部分为系统检测结果生成的一部分。系统测量结果与人工测量相比,测量精度更贴近机车的设计参数,且检测时间明显降低。
5 结论
针对传统的接触式车辆限界检测手段的不足,设计了一种基于大功率超声波的非接触式检测系统。实现了自动化检测的目标,提高了检测效率,极大降低了测量分析人员的工作量;采用由磁致伸缩材料制成的大功率超声波传感器,保证了测量的可靠度;总结前人所做工作,给出了多个传感器同时测量时的校准公式,使测量结果的精度更高;利用单片机系统高性能、低功耗、低价格等特点,结合PC机较强大的数据图像处理功能,将二者取长补短,有机融为一体;很好地满足了铁道机车车辆静态限界测量系统的需求。
[1] 吴斌,庄洵,刘常杰,等.铁路机车车辆静态限界测量系统校准方法研究.传感技术学报,2013,26(1):58-62.
[2] 郑天中.高武铁路限界有关问题探讨.铁道标准设计,1996,6(5):4-8.
[3] 鞠殿铭,郭维鸿,胡安洲.关于机车车辆静态限界若干问题的探讨.北方交通大学学报,1997,21(6):625-628.
[4] GB/T16904.2—2006 标准轨距铁路机车车辆检查 第2部分:限界规.
[5] 刘升平,王剑,葛红.超声波测距系统的开发与研究.计算机工程与应用,2009,45(25):78-81.
[6] 郭寅,刘常杰,刘刚,等.机车车辆静态限界非接触式自动测量测量系统.中国铁道科学,2013,34(1):135-138.
[7] 段培勇,薛峰,谢锦妹,等.激光扫描技术在铁路限界检测中的应用研究.铁道建筑,2013(8):89-92.
[8] 邹有建,肖龙鑫,陈鼎.判断某点是否在任意多边形内两种算法的比较.地矿测绘,2009(3):28-30.
[9] 赵建领,薛圆圆.零基础学单片机C语言程序设计.北京:机械工业出版社,2009.
[10] 郑对元等.精通LabVIEW虚拟仪器程序设计.北京:清华大学出版社,2012.
Fast and Automatic Vehicle Static Margin Based on High-power Ultrasonic Measurement
WU Jian-min1,WANG Qing-xian1,JIN Shun-li2
(1.School of Automation and Electrical Engineering,Lanzhou Jiaotong Uniwersity,Lanzhou 730070,China; 2.State Grid Gansu Electric Power Company Wuwei Power Supply Company,Wuwei 733000,China)
The static margin of the railway vehicle is a basic condition to ensure the safe operation of vehicles.In view of the problems such as operation complex and low efficiency of the existing contact test methods,based on the demand of automatic detection,this paper designed a vehicle clearance gauge detection system using high-power ultrasonic.The paper introduced the detection principle and then according to the structure of the system gave the corresponding correction formula,and ensured the accuracy of the measurement results.The system has simple measurement process and high measurement precision;it has achieved the goal of automatic measurement and can meet the requirements of tunnel limit test well.
static margin;vehicle;automatic measurement;high-power ultrasonic
甘肃省联合基金资助项目(211158)
2014-01-08 收修改稿日期:2014-10-20
TP399
A
1002-1841(2015)02-0085-03
吴俭民(1990—),硕士研究生,主要从事智能检测与控制、电力电子与电力传动领域的研究。E-mail:yboxuan@126.com 王庆贤(1955—),高级工程师,主要从事智能检测与控制、碳化硅节能减排等领域的研究。
猜你喜欢
铁道标准设计(2022年10期)2022-10-10
交通科技与管理(2021年5期)2021-06-13
科学(2020年3期)2020-01-06
科学中国人(2018年1期)2018-06-08
电子制作(2017年7期)2017-06-05
山东工业技术(2017年10期)2017-05-31
山东工业技术(2016年15期)2016-12-01
山东工业技术(2016年14期)2016-07-05
浙江理工大学学报(自然科学版)(2015年5期)2015-03-01
太空探索(2014年1期)2014-07-10