MEMS加速度传感器的数据采集和预处理
2015-06-07 10:47韩盈党
仪表技术与传感器 2015年2期
韩盈党,李 哲
(西安邮电大学电子工程学院,陕西西安 710061)
MEMS加速度传感器的数据采集和预处理
韩盈党,李 哲
(西安邮电大学电子工程学院,陕西西安 710061)
设计了一种基于微机电系统(MEMS)加速度传感器的数据采集单元,用微处理器通过内部集成电路(I2C)总线采集加速度传感器ADXL345的数据,对数据进行低通滤波、零偏误差修正以及去除重力加速度等,从而得到载体的运动加速度,并对加速度进行二次积分得到位移,在100 m范围内实测多次,仿真计算位移误差在2%以内。
微机电系统(MEMS);加速度传感器;内部集成电路(I2C);数据预处理
0 引言
随着微机电系统(Micro Electro Mechanical System,MEMS)和微加工技术的发展,微型传感器也随之迅速发展。MEMS加速度传感器、陀螺仪、磁力传感器等构成惯性测量单元,可实现室内定位与导航功能,是全球定位系统(Global Positioning System,GPS)在室内环境的延伸。加速度传感器作为室内导航系统的一个核心敏感器件,具有体积小、价格低、功耗低等特点[1]。
利用MEMS加速度传感器测量速度和位移,目前国内工业和学术领域应用还相对较少,且测量位移精度较差或精度范围有限[2-3]。三轴MEMS加速度传感器的测量值以数据格式输出,经过预处理后,能够得到精度较高的载体前进方向的加速度值,满足室内导航系统需求。
文中讨论了对MEMS加速度传感器的数据采集、数据预处理数学建模、仿真分析等。预处理主要包括:零偏误差修正、滤除噪声以及去除重力加速度等,得到运动载体的实际前进方向加速度,再计算载体速度和位移。
1 数据采集
1.1 硬件电路
数据采集单元的硬件电路由微处理器模块和加速度传感器测量模块2部分组成。选用LPC1768作为主微处理器,加速度测量模块选用ADXL345传感器。
Cortex M3-1700开发板主处理器为LPC1768,具有I2C串行总线主接口。加速度传感器ADXL345是一款超低功耗三轴加速度计,13位有效数据输出,分辨率为3.9 mg/LSB,测量范围达±16g,输出数据为二进制补码格式,接口为I2C总线。处理器通过I2C串行总线接口访问读取传感器数据。
I2C BUS(Inter IC Bus)是芯片间串行传输总线,它有多主机模式和单主机模式,该硬件电路选用一主机、多设备的单主机连接模式。
硬件电路如图1所示,Cortex M3-1700开发板作为主机,三轴陀螺仪L3G4200D、三轴加速度ADXL345、三轴磁力计HMC5883L和大气压传感器BMP085分别作为设备,连接在I2C总线上。
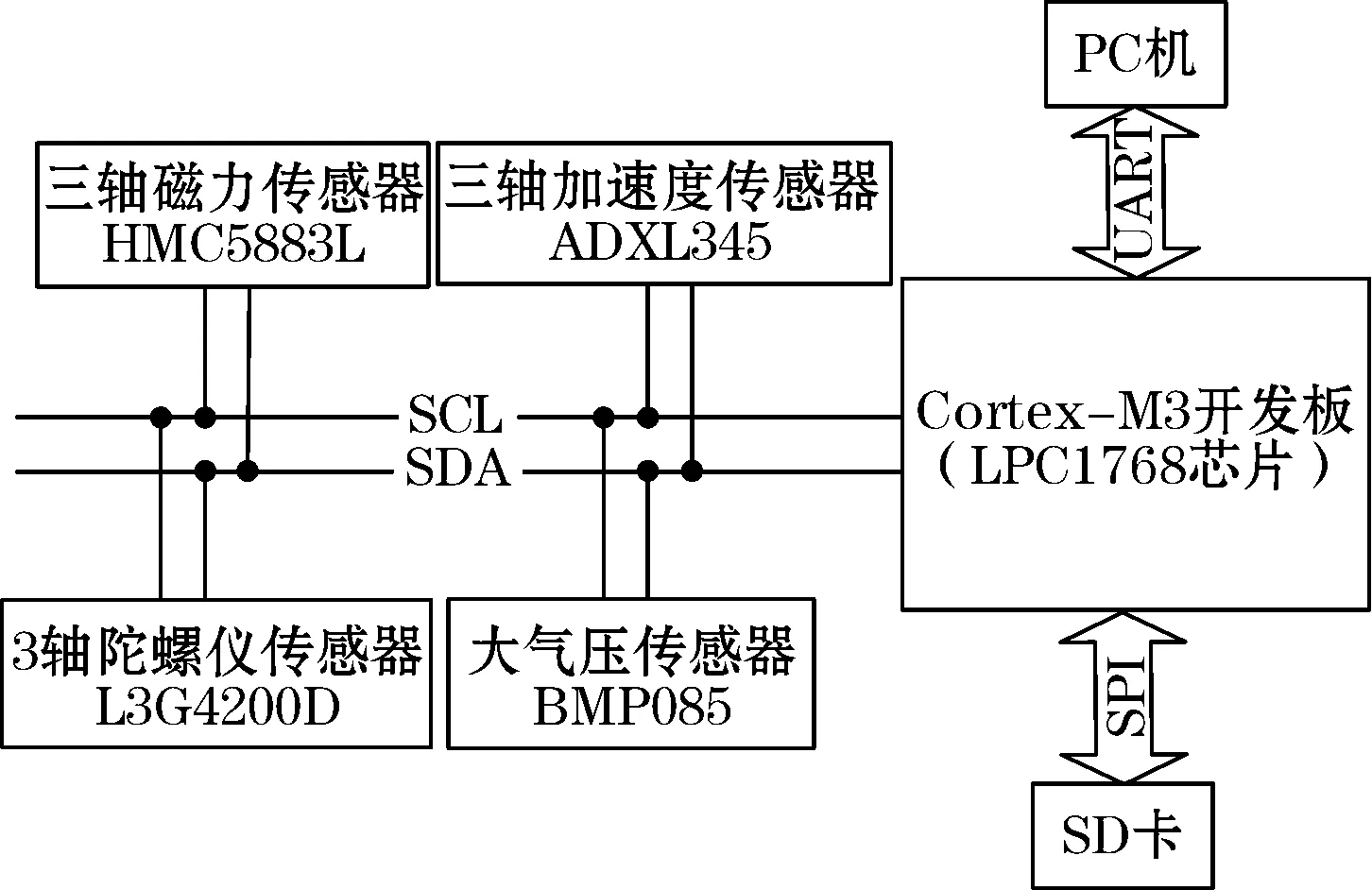
图1 硬件电路示意图
Cortex M3-1700开发板和PC机通过RS232串口进行通信,前者将读取的加速度传感器的数据通过RS232串口发送到PC机上,并在PC机上显示、保存和离线仿真处理。
1.2 软件设计
软件分为Cortex M3-1700开发板上嵌入式软件和PC机上数据接收软件。前者主要由I2C总线采集传感器数据软件和RS232串口传输软件组成,后者借助于串口调试软件接收、显示和保存数据,得到传感器测量的原始数据,用于预处理和仿真分析。软件流程图如图2所示。

图2 软件实现过程
I2C采集软件中,加速度传感器ADXL345初始化主要包括设置加速度测量范围为±16g、13位分辨率模式、数据输出速率为50 Hz、偏移校准以及数据读取方式等。
数据转换部分将加速度传感器所读取的二进制补码数据转换成加速度数据。ADXL345为16位数据格式,从数据寄存器中获取加速度数据后,用户必须对数据进行重建。DATAX0是X轴加速度的低字节寄存器,DATAX1是高字节寄存器。在13位模式下,高4位是符号位。ADXL345使用二进制补码数据格式,在13位模式下,1LSB代表3.9 mg。所以X轴测量数据Temp计算过程为
Temp=DATAX×3.9 mg
Y轴和Z轴测量原理同上。
2 数据预处理
在理想状态下,三轴加速度传感器的3个感应轴是完全正交的、没有误差存在,在Z轴向上水平静止时,它们的理想值(aX、aY、aZ)满足:aX=0,aY=0,aZ=g。
重力加速度值为g=9.8 m/s2,在西安地区,Z轴理想值为
aZ=9.794/9.8=0.999g
加速度传感器测量值存在固定偏差和随机误差,必须对原始数据进行滤波、误差校正以及去除重力加速度等预处理,得到真正载体运动前进方向加速度,再进行速度、位移等运算。
2.1 误差分析
(1)零偏误差所带来的积分误差。零偏误差为输入信号为零的时候,传感器的输出不为零的幅度。理论上,载体静止时,加速度传感器水平放置条件下理想值:aX=0,aY=0,aZ=0.999g,经长时间观察,实际测量值围绕某个值小幅波动,对其求平均值,三轴的均值分别减去各轴理想值,三轴差值的矢量和即为加速度传感器零偏误差。
(2) 随机噪声信号所带来的误差。在工程应用中,加速度传感器的测量值包含着许多不同类型复杂的噪声信号,形成前述围绕某个值的波动,即每次测量值都不一样。随机噪声主要来源于加速度传感器上的机械噪声、控制转换电路的电路噪声以及信号传输时的环境噪声3个方面,这些噪声降低了加速度传感器的测量精度。
2.2 误差解决办法
(1) 零偏误差使积分初始值不为零,会产生累计误差,用测量值的算术平均值减去理想值可得到零偏误差值aerror:
aerror=am-at
式中:am为加速度传感器的测量值的算术平均值;at为加速度理想值。
aerror通过离线标定可以获得,在实时测量中,用加速度测量值减去可去除零偏误差,消除积分的累计效应。例如当加速度传感器Z轴向上水平静止60 s时,经多次试验,加速度Z轴测量值的算术平均值am为1.085g,理论值at为0.999g,则零偏误差为
aerror=am-at=1.085-0.999=0.086g
实时测量时,把测量值减去0.086g的差值,就认为是真实值,也就是说用加速度测量值减去零偏误差值即可消除零偏误差。
(2) 载体姿态运动频带宽度远小于加速度传感器噪声带宽,选择低通滤波器合理的截止频率,降低带外噪声,可以提高加速度传感器测量精度。
人的步频普遍不超过5步/s,在每步中采样10组数据,因此加速度传感器选用50 Hz的采样频率,即可以满足加速度计算位移的需求。
在Simulink中建立低通滤波器仿真模型图3所示。

图3 仿真模型
低通滤波器选用494阶有限长单位冲激响应数字滤波器,采用equiripple法,采样频率为5 kHz,通带频率为50 Hz、截止频率70 Hz、通带衰减为1 dB。阻带衰减为60 dB。模型中input输入数据分别为加速度三轴测量值amX、amY、amZ,图4中示波器监测为加速度滤波前和滤波后的波形。

(a)

(b)图4 加速度动态X轴滤波前和滤波后波形
2.3 去除重力加速度对计算位移的影响
利用加速度传感器值二次积分来计算位移算法:
加速度积分一次可以得到载体速度即:
对速度积分一次可以得到位移量:
式中:am(t)为载体移动加速度;vm(t)为载体移动的速度;sm(t)为位移量;ami为第i时刻的加速度采样值;vmi为第i时刻的速率值;a0=0;v0=0;Δt为两次采样之间的时间差。
测量的加速度传感器数据是包含重力加速度在内的,不能直接利用测量数据计算位移,必须去除重力分量。加速度传感器测量的值是相对于载体坐标系(也称为传感器坐标系),利用三维坐标变换算法,将三轴加速度传感器的载体坐标系投影到水平坐标系中,得到水平坐标系加速度值,在水平坐标系中,去除重力(Z轴)加速度后,得到载体水平面运动加速度。
加速度传感器固定在载体上,加速度传感器坐标系即为载体坐标系O-XYZ,当加速度传感器固定在载体上以任意姿态运动时,载体坐标系可以由沿其前行方向的水平坐标系O-XnYnZn(Xn为前行方向,Zn指向天)经两次旋转得到,如图5所示。
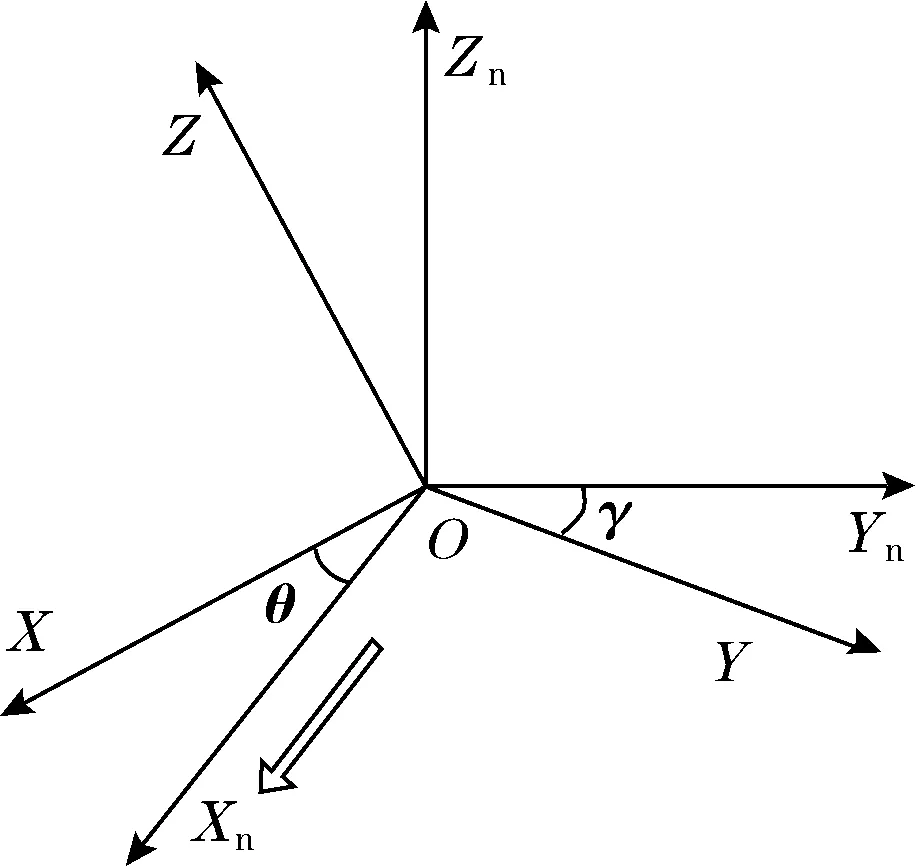
图5 载体坐标系与水平坐标系之间的方位关系
说明:其中角θ、γ分别表示载体的俯仰角和翻滚角,坐标系符合右手定则。
加速度传载体坐标系同水平坐标系之间的三维坐标变换矩阵为[4]:
根据变换矩阵可以计算加速度传感器在水平坐标系中X、Y、Z轴的投影,从而消除重力加速度对载体运动加速度在水平坐标系中计算位移的影响,其计算公式为:
anX=aXcosγ+aYsinγsinθ-aZsinγcosθ
anY=aYcosθ+aZsinθ
anZ=aZsinγ-aYsinθcosγ+aZcosθcosγ
式中:anX、anY、anZ分别为加速度传感器在水平坐标系中X、Y、Z轴的投影分量,分别为加速度传感器载体坐标系中X、Y、Z轴的测量值经过滤波和零偏误差校正后的值。
当加速度传感器静止时,用三维坐标变换公式,将滤波和去除零偏后的加速度传感器数据进行坐标变换,理想状态在水平坐标系中X、Y轴分量分别等于0g,但在实测30 s时,水平坐标系中X、Y轴的投影分量的平均值分别为anXerror=-0.031g,anYerror=-0.005g,对水平坐标系中X、Y轴加速度之矢量和积分,一次积分的速度误差在0.2 m/s以内,二次积分的位移误差在0.7 m以内。
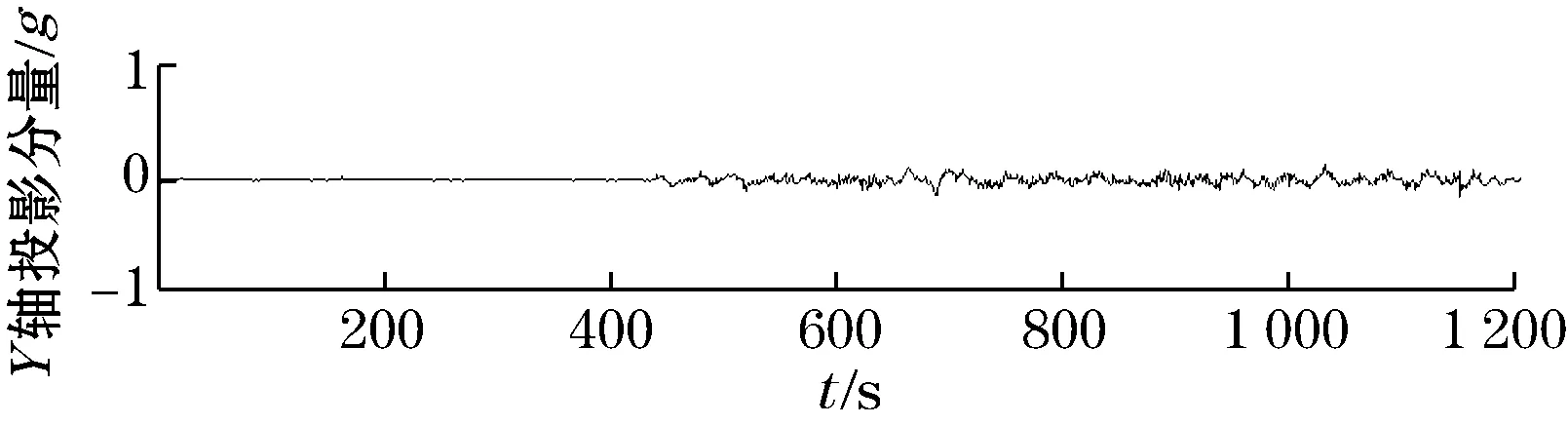
当载体运动30 m,对测量的加速度三轴数据经过滤波和去除零偏后,应用坐标变换公式,将载体坐标系投影到水平坐标系中,其中一组数据在X、Y、Z轴的投影如图6所示,计算出水平坐标系中加速度之矢量和的模值为
上式即为载体运动前行方向加速度模值。

(a)
(b)

(c)图6 水平坐标系X轴、Y轴、Z轴投影分量
由于在载体静止状态时进行坐标变换后,实际测量数据与理论值存在一定的零偏误差,所以在动态数据中应减去载体静态时的零偏误差值,即:

求得其在水平坐标系中的矢量和:
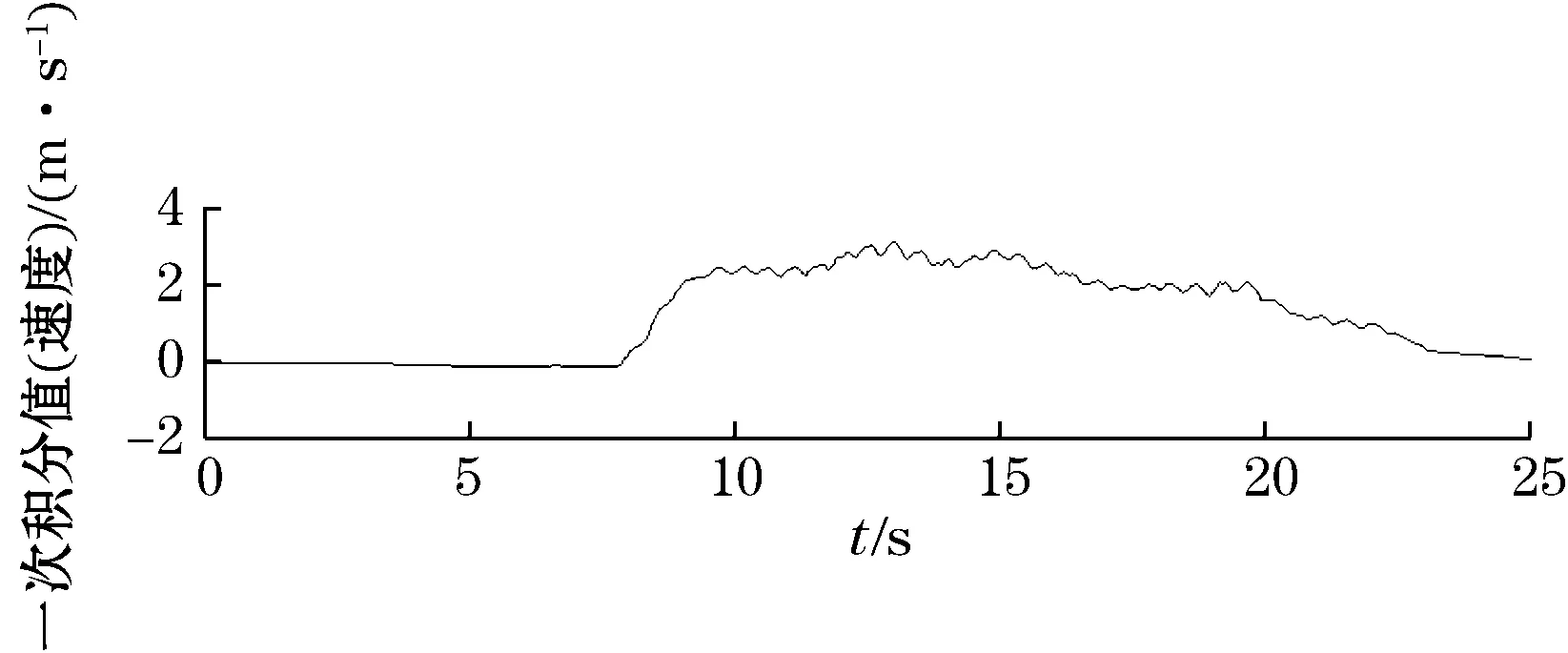
用1g=9.8 m/s2将单位换算成m/s2,然后进行一次积分和二次积分分别求得载体速度和位移量。仿真结果图7所示,当传感器载体在实际移动30 m时,用载体投影在水平坐标系中X、Y轴加速度之矢量和计算位移,一次积分的速度在2 m/s左右波动,二次积分的位移为29.7 m,符合实际的位移量,误差为0.3 m,计算结果误差较小。
3 结束语
基于Cortex M3-1700开发板实现加速度的数据采集,采用低通滤波器对加速度信号进行了滤波处理,零偏误差校正,去除重力加速度等,仿真结果表明,利用处理后加速度计算位移重复性好,在100 m范围内位移测量相对误差小于2%,能满足室内导航的精度要求。

(a)
(b)

(c)图7 加速度、速度、位移仿真图
[1] 张海涛,阎贵平.MEMS加速度传感器的原理及分析.电子工艺技术,2003,24(6): 260-263.
[2] 容太平,沈承虎,袁中平,等.用加速度传感器测量位移的原理与误差分析.华中理工大学学报,2000,28(5):58-60.
[3] 陈建新,王荣,章韵.MEMS加速度传感器的距离测量性能分析.电脑与电信,2011(11):30-32.
[4] 宋丽梅.磁阻式电子罗盘的软件集成设计:[学位论文].哈尔滨:哈尔滨工程大学,2007:22-25.
[5] 李绪友,梁辉,邹继斌.捷联式惯导系统中加速度计的数据采集.传感器技术,2005,24(6):20-22.
[6] 李跃,邱致和.导航与定位—信息化战争的北斗星.2版.北京:国防工业出版社,2008: 384-429.
[7] 许睿.行人导航系统算法研究与应用实现:[学位论文].南京:南京航空航天大学,2008:20-33.
[8] 李东文,熊晓燕,李博.振动加速度信号处理探讨.机电工程技术,2008,37(9):51-52.
[9] 郑成辉,王新华,郭淑琴.基于MEMS传感器定位测量系统的硬件设计.杭州电子科技大学学报,2012(4):126-128.
[10] 王建东,刘云辉,宋宝泉,等.行人导航系统设计与IMU模块数据预处理.电测与仪表,2006,43(11): 19-22.
Data Acquisition and Pre-processing Based on MEMS Accelerometer
HAN Ying-dang,LI Zhe
(School of Electronic Engineering,Xi’an University of Posts and Telecommunications,Xi’an 710061,China)
An accelerometer data acquisition unit was designed based on Micro Electro Mechanical System (MEMS). The date of ADXL345 acceleration sensor were collected with the microprocessor through the I2C bus, and the data were through lowpass filtering, zero offset error correction, gravitational acceleration elimination, etc. As a result, acceleration of the movement of the carrier was
, and displacement was got through the secondary integral of the acceleration. Through repeated measurements within 100 meters, the displacement error of the simulation calculation was less than 2%.
Micro Electro Mechanical System(MEMS);acceleration sensor;inter-integrated circuit(I2C);data preprocessing
2013-12-17 收修改稿日期:2014-11-30
TN962
A
1002-1841(2015)02-0016-04
韩盈党(1985—),硕士研究生,研究方向为通信系统与电路。E-mail: hanYingdangai432@163.com 李哲(1963—),教授,硕士,从事计算机应用及嵌入式系统研究。E-mail:xytx03@xupt.edu.cn
猜你喜欢
温州大学学报(自然科学版)(2022年2期)2022-05-30
导航定位学报(2022年2期)2022-04-11
潍坊学院学报(2020年2期)2021-01-18
电子制作(2018年16期)2018-09-26
中学生数理化·七年级数学人教版(2018年4期)2018-06-28
数学大世界(2018年1期)2018-04-12
制导与引信(2017年3期)2017-11-02
火控雷达技术(2016年3期)2016-02-06
海军航空大学学报(2015年1期)2015-11-11
空间控制技术与应用(2015年3期)2015-06-05