基于双测头的时栅位移传感器自标定方法
2015-06-07 10:47陈锡侯彭东林官云丽
仪表技术与传感器 2015年2期
鲁 进,陈锡侯,彭东林,官云丽
(1.时栅传感及先进检测技术重庆市重点实验室,重庆 400054;2.重庆理工大学电子信息与自动化学院,重庆 400054)
基于双测头的时栅位移传感器自标定方法
鲁 进1,2,陈锡侯1,彭东林1,官云丽2
(1.时栅传感及先进检测技术重庆市重点实验室,重庆 400054;2.重庆理工大学电子信息与自动化学院,重庆 400054)
为提高时栅的测量精度,扩大其应用领域,提出了一种基于双测头的时栅位移传感器实时在线自标定方法。利用空域信号傅里叶级数的空间位移和线性性质,找出了相距一固定角的两个测量位置时栅示值之差数列的傅里叶级数与误差函数傅里叶级数间的关系;在此基础上,提出利用双测头相对回转的方法,实现了相距定角的两测量位置时栅示值之差数列的傅里叶级数的获取和误差函数的重构;分析了定角取值对误差函数重构精度的影响。试验结果表明:该方法能在误差频次高、误差成分复杂的条件下有效降低整周范围内时栅的测量误差,对72对极的时栅传感器,经自标定后剩余误差的峰-峰值小于2″,达到计量光栅精度水平,且系统极易集成,易于实现。该方法特别适合于大直径、大中空等极端特殊条件下时栅的自标定,也同样适用于其他同类型位移传感器的自标定。
时栅;传感器;自标定;位移;误差
0 引言
时栅传感器是一种不依赖空间精密刻划而采用时间脉冲作为测量基准的高精度位移传感器[1-3],具有加工成本低、测量精度高,抗摔打和抗干扰能力极强的特点。除实现常规条件的精密测量外,时栅传感器还可直接将被测对象的传动件(如齿轮或者蜗轮)作为传感器的一部分,从而实现大直径、大中空等无法安装传统位移传感器的极端特殊条件下的精密测量[4]。
由于加工制造、安装等原因,时栅不可避免地存在误差;同时,长期工作于极端条件下的时栅,其电气、机械等参数又极易因现场特殊恶劣的环境发生变化,导致测量精度下降。这些都迫切要求能对时栅进行在线标定以提高其测量精度。以往对时栅的标定均基于传统的比较式标定法,通过将被标定时栅同更高精度参考基准(如多面棱体等)进行比对测量来实现[5-6]。该方法除不能在使用期间实时跟踪时栅误差的变化外,对于应用于极端特殊条件下的时栅,还往往因为现场难以提供或安装高精度参考基准而无法实施。为此,研究时栅传感器的在线自标定方法,对不断提高时栅的测量精度,进一步完善时栅的系统理论具有重要的现实意义。
位移传感器的自标定方法国内外已进行过相关研究。Masuda和Kajitani通过在角度编码器主刻度标尺的同一圆周上空间不等间距设置6个读数头,实现了编码器精度的自检[7]。Watanabe等利用2个同轴安装码盘在不同位置进行分度误差互检,自动去除码盘误差中的傅里叶误差成分[8];他们还提出在单码盘圆周均布5个读数头自校准的方案,在理论上消除了除5次分量外的所有分度误差[9]。Zhang G.X.等采用具有正弦传递函数的光栅刻度盘和空间非等距布置4个测头的方案,在输出端分离出了分度误差[10]。上述几种方法均采用在空间布置多个测头的方式实现,但要求各测头读取的编码器分度误差相同,否则将引入新的误差。X.D.Lu和D.L.Trumper根据时域内光栅脉冲宽度的测量值和精密轴系自由响应的动态特性,实现了单读数头下光栅分度误差的自标定和自校准[11]。但这种方法对轴系运动控制的要求极高,在使用现场难以实现。Hu Chuxiong等采用带有标志线的附加模板在不增加测头的条件下实现了位移测量系统的自标定[12],但该方法只针对安装偏心和加工不圆度等引入的低次误差,并且需要附加的模板和读数装置。
通过以上分析可以看到,上述自标定方法均针对本身具有极高刻划精度的光栅副构成的位移传感器,而时栅传感器由于具有更高频次和更为复杂的误差成分,故上述方法无法满足其自标定要求。针对该问题,本文提出了一种基于双测头的位移传感器自标定新方法,可在两测头和后续处理电路误差规律完全不同的情况下,有效实现传感器特别是应用于极端特殊条件下、直接采用被测对象传动件作为分度器的时栅传感器的实时在线自标定。
1 时栅测量模型及其误差描述
若在空间存在一以匀速v运动的参考坐标系,并在空间某点设置一定测头Pa,那么另一以任意速度v运动的动测头Pb和定测头Pa间的空间角位移θ,可通过参考坐标系上观察到Pa和Pb的时间差Δt,如图1所示,此时θ=v·Δt.

图1 时栅测量模型
实际构造传感器时,由于加工、安装、电气参数偏差等引起v的变化,将产生测量误差。按照周期函数傅里叶级数展开的思想,时栅传感器的误差函数总可用傅里叶级数描述为:
(1)
式中:i为误差谐波次数;ai为各次谐波幅值;φi为各次谐波初相角。
2 自标定原理
对于时栅位移传感器量程范围内的任意测量位置θ,时栅的示值可表示为
f(θ)=θ+δ(θ)
(2)
式中δ(θ)为时栅在测量位置θ的示值误差。
同理,在测量位置θ+θ1时,时栅示值为
f(θ+θ1)=θ+θ1+δ(θ+θ1)
(3)
式中δ(θ+θ1)为时栅在测量位置θ+θ1的示值误差。
在测量位置θ和θ+θ1,时栅两示值之差为
f(θ+θ1)-f(θ)=θ1+δ(θ+θ1)-δ(θ)
(4)
两示值之差的误差为
Δ=f(θ+θ1)-f(θ)-θ1=δ(θ+θ1)-δ(θ)
(5)
根据信号理论,空域信号的傅里叶级数具有空间位移和线性两个重要性质。因此,根据上述两个性质及式(1),δ(θ+θ1)-δ(θ)的傅里叶级数可表示为

(6)
将式(6)带入式(5),有:
(7)
若f(θ+θ1)-f(θ)-θ1各次谐波的幅值和初相角分别记为Ai和Φi,则有:
(8)
即
(9)
进一步,若θ1为一定值,则时栅在相距θ1的两测量位置示值之差f(θ+θ1)-f(θ)各次谐波的幅值和初相角仍为Ai和Φi,其直流分量即为θ1,即θ1=A0。因此,有
(10)
3 双测头时栅自标定方法
为获得定角θ1,实现时栅的自标定,在被测转台的同一圆周上布置了2个测头Pb1和Pb2,如图2所示,且允许两测头各自后续处理电路存在差异。
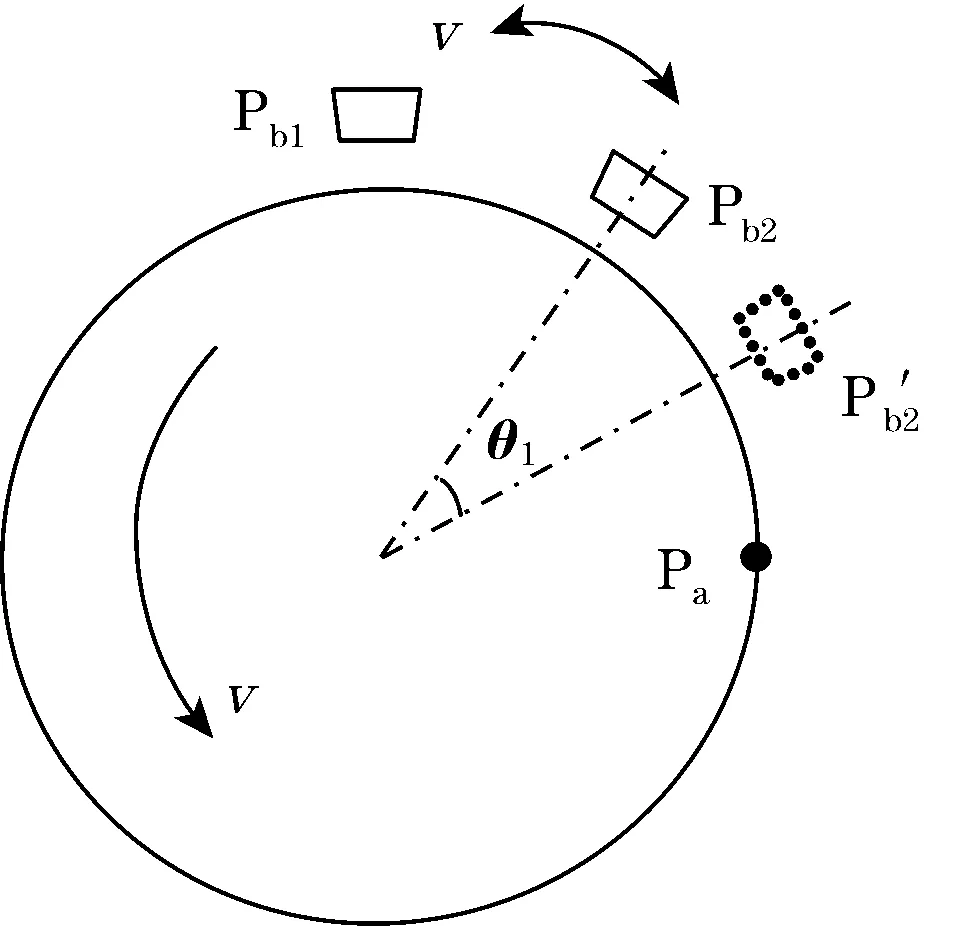
图2 双测头时栅自标定模型

第二次整周测量完成后,将得到的两测量值数列B1{n}和B{n}一一对应相减,得到数列C{n},即
C{n}=B1{n}-B{n}
(11)
当整周范围内的测量点足够多,即n足够大时,可对数列C{n}进行离散傅里叶变换。该傅里叶变换后的直流分量即为两测头相对回转的角度值θ1,也即式(10)中的θ1;而变换后各次谐波的幅值和初相角则分别为式(10)中的Ai和Φi。然后,根据式(10)计算误差函数δ(θ)各次谐波的幅值ai和初相角φi,并根据式(1)重构测头Pb2的误差函数δ(θ)。
理论分析表明,根据式(1)重构误差函数δ(θ),需已知δ(θ)所有谐波的幅值和初相角。但实际时栅传感器采用多对极结构,因此,其谐波误差主要集中在以下2个方面。
(1)若时栅采用N极对,则理论上只存在N的整数倍次谐波误差[13]。而在所有N的整数倍次谐波误差中,越高次的谐波误差分量越小,绝大部分误差分量集中在较低次的前6个谐波上,即i=N,2N,…,6N。
(2)由于加工制造、安装等原因,采用N极对的时栅,除存在N的整数倍次谐波误差外,还存在少量的低次误差。如时栅加工过程引入的分度误差、椭圆误差,安装过程引入的同心度误差、偏摆误差等,均会产生低次误差。这类低次误差主要集中在前6次谐波上,即i=1,2,…,6。
上述2部分误差总和占到了时栅总误差的95%以上。而为了进一步减小剩余误差的影响,实验中取时栅的30个谐波来重构误差函数,即
(12)
式中i=1,2,…,10,N,2N,…,20N。此时整周范围数据测量点个数应不低于40N,才能实现误差函数的无失真重构。
4 定角取值对重构精度的影响
时栅传感器误差函数的重构精度受多个因素的影响,主要包括传感器示值的稳定度,离散傅里叶变换的精度,除1次、2次,…,10次,N次,2N次,…,20N次谐波误差外剩余误差的影响以及θ1的影响等。由于时栅的输出采用多点滑动平均值,故其示值的稳定度相当高;当整周范围的数据测量点足够多时,离散傅里叶变换的精度也极高;同时,除1次、2次,…,10次,N次,2N次,…,20N次谐波误差外,剩余误差的影响又极小。因此,本文主要分析θ1对误差函数重构精度的影响。

(13)
由式(13)可以看出,当θ1取不同值时,误差函数的精度是不同的,故进行自标定时,需合理选择θ1的值,才能得到更接近实际的误差函数。
5 试验验证与结果分析
为验证上述自标定方法的可行性和有效性,搭建了图3所示的双测头时栅自标定试验系统,并进行了自标定试验验证。

图3 自标定试验系统
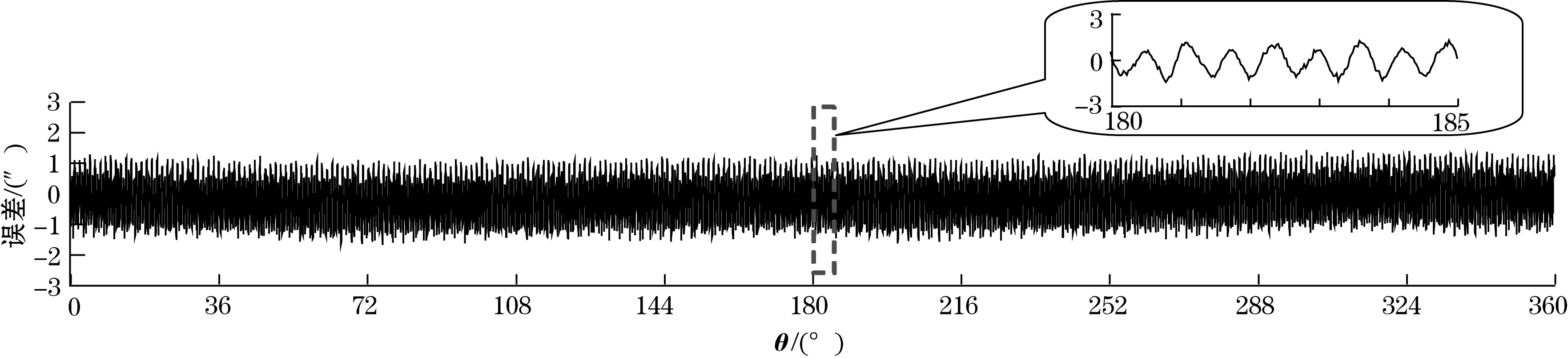
试验选用现有最常用的72对极场式时栅进行了标定(其1个对极为5°)。在自标定试验前,先用高精度参考基准对该时栅进行了比较式标定,获得了该待标定时栅的原始误差曲线,如图4所示。高精度参考基准采用德国HEIDENDAIN公司的RON886孔式光栅传感器,标称精度为±1″,实际测量精度优于±0.4″。

图4 待标定时栅的原始误差
自标定试验共进行了3次,双测头时栅的两测头在3次实验中分别相对回转了247″、1 169″以及6 632″。在各次自标定试验完成后,同样采用该高精度光栅传感器进行了比较式标定,获得了各次自标定后时栅的剩余误差,分别如图5(a)~图5(c)所示。

(a)θ1=247″

(b)θ1=1 169″
(c)θ1=66 329″图5 自标定后的剩余误差
由图4和图5可以看出,自标定前时栅传感器整周范围内的原始误差为-54″~26″,经过自标定后,误差明显降低,且时栅两测头相对回转角度不同,自标定效果也不同。
当两测头相对回转角度θ1=1 169″时,自标定效果较为显著,自标定后整周范围内剩余误差仅为-0.8″~1.1″,其峰-峰值优于2″,且剩余误差中,各次谐波误差均较小;当两测头相对回转角度θ1=6 632″时,自标定效果也较好,自标定后整周范围内剩余误差为-1.7″~1.5″,但剩余误差中,576次谐波误差较为明显;当两测头相对回转角度为θ1=247″时,整周范围内剩余误差为-2.6″~1.5″,在剩余误差中,72次和144次谐波误差较为明显。这与前面的理论分析结果是一致的。由式(13)可以算出,当θ1=1 169″时,由θ1引起δ(θ)的极限误差δΔ中,各次谐波的幅值均很小,故总的剩余误差也小;当θ1=6 632″,由θ1引起δ(θ)的极限误差δΔ中,除576次谐波的幅值较大外,其余各次谐波的幅值均较小,故其总的剩余误差也较小;而当θ1=247″时,由θ1引起δ(θ)的极限误差δΔ中,各次谐波的幅值均相对较大,其中以72次和144次谐波的幅值最大,故其总的剩余误差相对较大。因此,在自标定时,应根据式(13)合理选择θ1的值,才能实现更好的自标定效果。
6 结束语
针对时栅传感器的误差特点,提出了基于双测头的时栅位移传感器实时在线自标定方法,并进行了试验验证。结果表明:72对极双测头时栅传感器采用1 169″的定角进行自标定,效果较好,其整周范围内剩余误差的峰-峰值小于2″,且并不要求两测头和后续处理电路误差规律相同。试验结果验证了本文提出的基于双测头的时栅传感器自标定方法,能有效降低传感器的测量误差,且系统极易集成,易于实现。本文提出的自标定方法,特别适合于大直径、大中空等极端特殊条件下时栅的自标定,也同样适用于其他同类型传感器的自标定,具有广泛的应用前景。
[1] 彭东林,刘小康,张兴红.高精度时栅位移传感器研究.机械工程学报,2005,41(12):126-129.
[2] 彭东林,陈锡侯,朱革,等.时栅的波动方程分析与行波形成新方法.机械工程学报,2006,42(11):39-43.
[3] 彭东林,张兴红,刘小康,等.场式时栅位移传感器研究.仪器仪表学报,2003,24(3):329-331.[4] 彭东林,李彦,付敏,等.用于极端和特殊条件下机械传动误差检测的寄生式时栅研究.仪器仪表学报,2013,34(2):359-365.
[5] 彭东林,刘小康,张兴红,等.基于谐波修正法的高精度时栅位移传感器.仪器仪表学报,2006,27(1):31-33.
[6] 高忠华,陈锡侯,郑方燕.时栅角位移传感器误差修正及其测试系统.仪表技术与传感器,2012(9):75-77.
[7] MASUDA,KAJITANI.An automatic calibration system for angular encoders.Precision Engineering,1989,11(2):95-100.
[8] WATANABE T,FUJIMOTO H,NAKAYAMA K,et al.Automatic high precision calibration system for angular encoder.The International Society for Optical Engineering,2003,5190:400-409.
[9] WATANABE T,FUJIMOTO H,MASUDA T.Self-calibration rotary encoder.7th Int.,Sym,Meas.,Technol.Intellig.Instrum.,2005:240-245.
[10] ZHANG G X,WANG C H,LI Z.Improving the accuracy of angle measurement system with optical grating.CIRP Annals- Manufacturing Technology,1994,43(1):457-460.
[11] LU X D,TRUMPER D L.Self-calibration of on-axis rotary encoders.CIRP Annals - Manufacturing Technology,2007,56(1):499-504.
[12] HU C X,ZHU Y,HU J H,et al.An on-axis self-calibration approach for precision rotary metrology stages based on an angular artifact plate.Measurement Science and Technology,2013,24(8):85-91.
[13] 和子康.机床传动精度测量和提高.北京:中国计量出版社,1987.
Research of Self-calibration Method for Time Grating Displacement Sensor Based on Two Read Heads
LU Jin1,2,CHEN Xi-hou1,PENG Dong-lin1,GUAN Yun-li2
(1.Chongqing Key Laboratory of Time Grating Sensing & Advanced Testing Technology,Chongqing 400054,China; 2.College of Electronic Information and Automation,Chongqing University of Technology,Chongqing 400054,China)
To improve measurement accuracy of time-grating displacement sensor and expand its application field,a new self-calibration method for displacement sensor based on two read heads was proposed.Using space shifting property and linear property of Fourier series,the relationship of Fourier series between sensor error and different sequences of two indicating values spacing fixed-angle was established.On this basis,using relative rotation of the two read heads,the Fourier series of different sequences of two indicating values spacing fixed-angle was achieved,and error function was reconstructed.The influence of fixed-angle values on reconstruction accuracy of error function was discussed.Experiment results indicate that the self-calibration method for time grating displacement sensor proposed in this paper can effectively reduce sensor error in the range of.For the time-grating displacement sensor with 72 pole pairs,the peak-peak value of remainder error after calibration is about 2″ or less.This system is easy to integrate and implement,and particularly suitable for calibrating time-grating displacement sensor under special extreme conditions.The results also can be applied to other same kind sensors.
time grating;sensor;self-calibration;displacement;error
国家自然科学基金资助项目(51005263)
2014-01-15 收修改稿日期:2014-10-11
TP212
A
1002-1841(2015)02-0078-04
鲁进(1980—),讲师,硕士,主要从事精密测量与智能传感器研究。E-mail:jinlu@cqut.edu.cn 陈锡侯(1976—),教授,博士,主要从事机械量精密测量技术与位移传感器研究。E-mail:cxh0458@cqut.edu.cn
猜你喜欢
纺织标准与质量(2022年4期)2022-09-05
纺织标准与质量(2022年1期)2022-07-12
汽车维修与保养(2020年11期)2020-06-09
智富时代(2019年2期)2019-04-18
智富时代(2019年2期)2019-04-18
电子制作(2018年18期)2018-11-14
电子制作(2018年17期)2018-09-28
通信电源技术(2018年5期)2018-08-23
电子制作(2018年9期)2018-08-04
质量技术监督研究(2018年1期)2018-03-26