
飞机起落架机构运动仿真技术研究
2015-05-31 06:45中航工业成都飞机工业集团有限责任公司刘顺涛陈雪梅赵正大尹华彬
航空制造技术 2015年6期
中航工业成都飞机工业(集团)有限责任公司 刘顺涛 陈雪梅 赵正大 尹华彬
现代军机结构中含有大量运动机构,这些机构结构复杂,运动副(连杆、铰链等)数量众多,运动过程和运动关系复杂多变,给设计及装配过程带来了巨大挑战。通过虚拟仿真技术对这些复杂运动机构的运动原理进行分析和仿真,能有效地帮助工艺人员进行工艺分析,找出运动机构中的可调量,指导现场工人进行安装调试,缩短设计及装配周期。
本文采用CATIA的运动学仿真模块DMU对飞机起落架机构进行运动机构仿真和分析,能够有效模拟飞机起落架机构的实际运动状态,为其设计、优化及装配提供了依据。
1 起落架结构特点
飞机起落架机构是飞机运动机构中最为复杂的结构之一,它为飞机起飞、着陆、滑行和地面停放提供支撑,同时也能吸收飞机在滑行和着陆过程中的振动和冲击。几乎所有军用和民用飞机在起飞着陆过程中都伴随有起落架的收放运动。现代军机空地循环周期短的特点导致起落架使用频繁、故障几率增大,而在起落架系统的各个运动部件中,收放机构在使用中出现故障的概率较高。
起落架装置中包括起落架收放装置和起落架前舱门两套运动机构,由舱门作动筒对起落架前舱门,收放作动筒对起落架分别进行驱动。收起起落架的工作流程为:舱门作动筒动作打开起落架舱前门,撑杆作动筒动作拉动撑杆由锁死部位至可运动部位,然后收放作动筒动作收起起落架,同时带动起落架后舱门关闭,最后舱门作动筒动作关闭起落架前舱门。
2 运动机构分析
运动学理论已经指出,运动机构要实现仿真需满足自由度为0的条件[1],即:
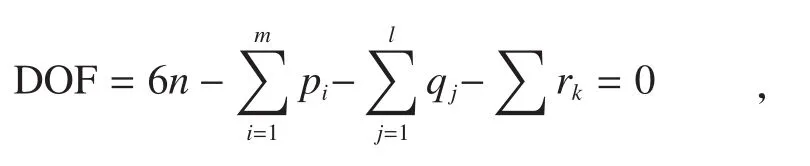
式中,n为运动构件总数,m为运动副总数,l为驱动器总数,pi为第i个运动副的约束个数,qj为第j个驱动器的驱动约束条件数,rk为其他约束条件个数。
基于如上定义,某型机起落架前舱门和收放装置的运动机构的自由度均应为0,以实现其机构运动仿真,其运动机构简图见图1。
以此为依据,可在CATIA的运动学仿真模块DMU对运动机构进行仿真。仿真的关键步骤是在运动结构中各个具有相对运动关系的运动部件之间,定义合适的运动副进行必要的约束和连接,以满足运动机构自由度为零的要求[2]。机构中每个运动部件通常都包括多个运动副,该起落架机构运动仿真中涉及的运动副包括:固定副、旋转副、圆柱副、球面副、U型副等。其中固定副、旋转副、圆柱副、球面副在运动机构中形式单一,运动也相对简单。U型副相对复杂,它允许两个运动部件之间有两个相对转动的自由度,等同与轴线相交的两个转动副,用于传递两根相交轴之间的运动,本质上是一个球铰4杆机构。当主动轴以角速度ω1转动时,输出轴以角速度ω2=ω1cosα(α)为主动轴与输出轴的夹角)运动,这种运动副的优点在于当两运动轴之间的夹角发生变化时,运动传递不会发生中断,仅两轴之间的瞬时传动比发生变化。
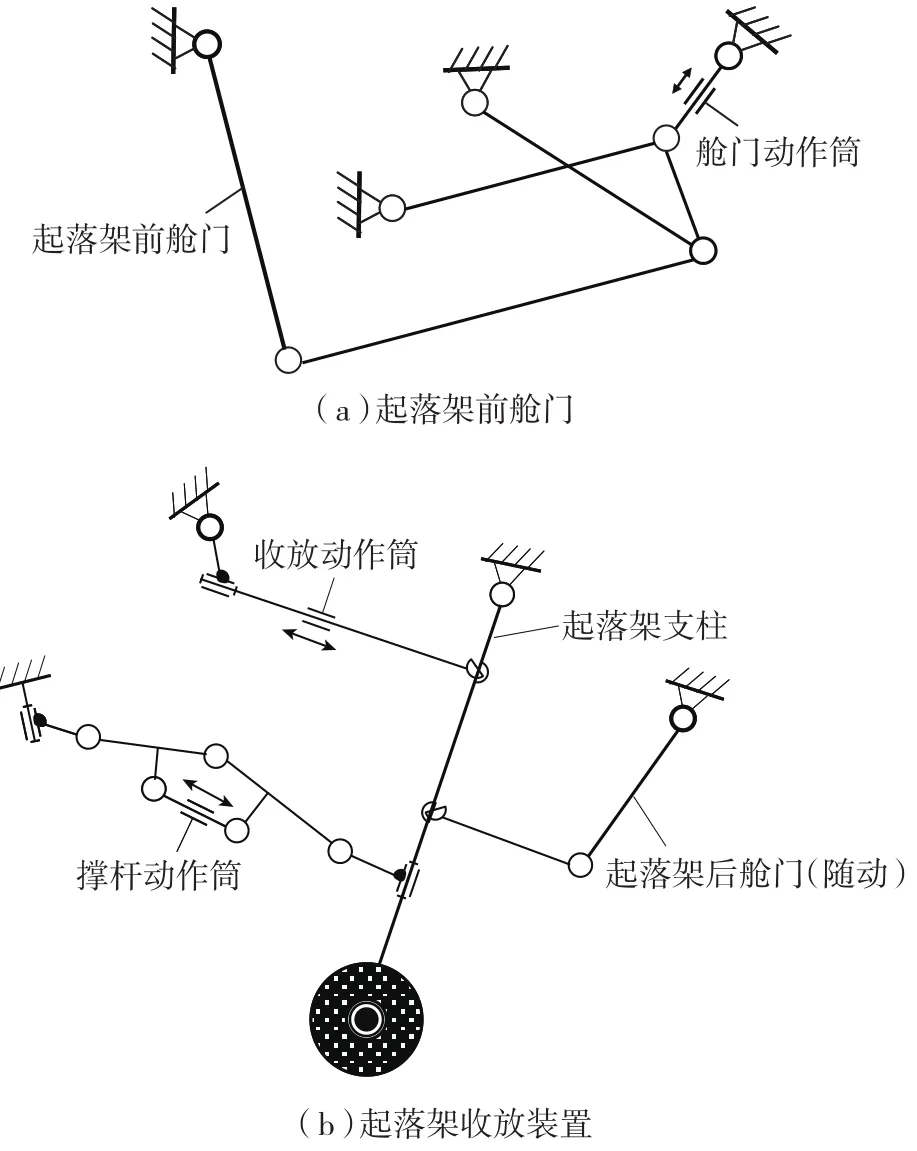
图1 某型机起落架运动机构简图Fig.1 Kinematic scheme of a type of aircraft landing gear
在运动仿真中,U型副通常与球面副成对出现,其结构特点是,可调拉杆两端的孔径远大于与之相连的运动构件轴径。构件1为可调拉杆(实际安装中长度可调),构件1与2之间、构件1与3之间均为带夹角的转动,构件1起到传递转动的作用。将构件1与2之间定义为U型副,构件1与3之间定义为球面副,即能保证运动机构的正常运动而且无多余的自由度,机构原理如图2所示。
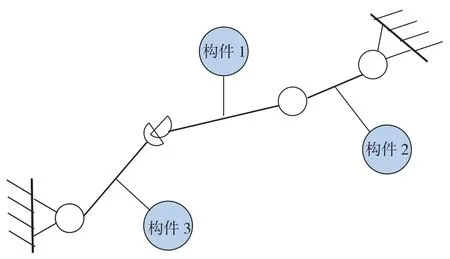
图2 U型副与球面副运动机构简图Fig.2 Kinematic scheme of U-joint and ball-joint
3 仿真结果与分析
参照以上分析对某机型起落架机构进行完整的机构运动仿真,以图1(b)为依据对起落架运动机构进行分解,转换约束为运动副,对作动筒添加驱动,进行仿真后可最终得到整个起落架工作过程中的每个运动状态。
如前文所述,该运动仿真包括了起落架收放装置和起落架前舱门两套运动机构共3个驱动器(舱门作动筒、收放作动筒和撑杆作动筒),因此利用DMU进行运动仿真时,应相应地定义3组运动机制,并根据实际运动的逻辑关系对3种机制进行顺序定义,以实现完整的运动仿真。
在此基础上,还应根据作动器的实际运动情况建立规则关系(如驱动参数和运动时间的关系)用于驱动仿真,如图3所示。

图3 用于驱动仿真的规则关系Fig.3 Laws used to drive the simulation
运动副定义和仿真设置完成后,可根据实际需求对起落架运动机构进行多种分析检查。
(1)零件干涉检查。利用DMU的“碰撞检查”功能可检查零件在运动过程中的干涉情况,即在机构运动过程中,如果出现了零件之间的干涉,系统会自动停止运动仿真并标明干涉位置。这项功能能够有效地帮助设计人员及时发现错误,调整设计。
(2)运动轨迹分析。利用DMU的“运动轨迹”功能 可以测量分析运动部件上任意部位的运动轨迹。如图4所示为轮胎中心轴线在整个起落架收放过程中的运动轨迹。
(3)运动速度及加速度分析。利用DMU的“速度/加速度”功能可以测量分析运动部件上任意一点的速度和加速度。如图5所示为轮胎中心点在整个起落架收放过程中的速度与加速度曲线。
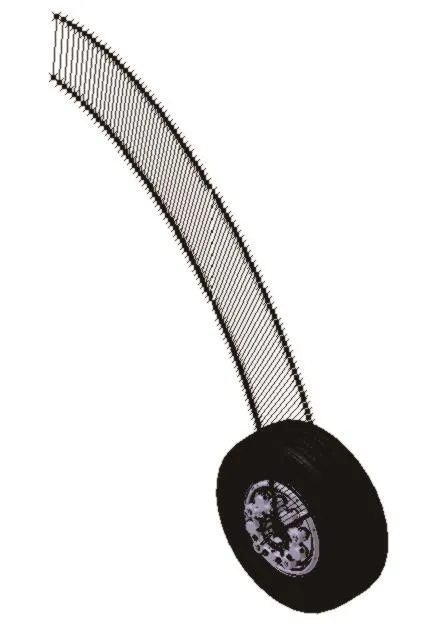
图4 轮胎中心轴线运动轨迹Fig.4 Motion track of the central axis of tire

图5 轮胎中心点运动曲线Fig.5 Motion cure of tire center
(4)扫掠包络体分析。
利用DMU的“扫掠包络体”功能可以测量运动部件在运动过程所扫过的体积。如图6所示为起落架舱门在整个起落架收放过程中所扫掠过的包络体。
图6 起落架舱门运动包络体Fig.6 Motion swept volume of landing gear door
4 结束语
进行起落架机构的运动仿真能使设计与工艺人员直观地看到各运动部件间协调运动过程,得到许多试验难以得到的仿真结果,从而可以直观地进行机构参数的调整与改进,方便现场工人进行安装调试,有效地缩短设计及装配周期。
本文通过对起落架机构运动进行的仿真技术研究,能够指导工艺人员对起落架进行运动仿真分析,检验产品设计是否合理,更好地开展起落架机构的审图工作。当设计部门对起落架的结构件提出更改时,能够通过仿真查看起落架整个运动过程中是否发生干涉。该仿真技术还能帮助工艺及装配人员熟悉起落架机构的运动原理,更好地完成现场调试安装工作。
开展起落架机构运动仿真技术研究对制造单位具有重要意义,其应用及推广能够有效地预防、解决起落架的设计、安装及调试过程中的各种问题。目前,此类运动机构仿真技术研究还处于起步阶段,后续研究还可在运动分析的基础上,利用ANSYS等有限元软件对工作过程中的主要承力连接臂进行有限元分析,以及利用ADAMS等系统仿真软件进行系统动态/性能仿真等工作。
[1] 孙桓,陈作模,尤春风.机械原理.北京:高等教育出版社,2001.
[2] 尤春风.CATIA V5高级应用.北京:清华大学出版社,2006.
猜你喜欢
科学技术创新(2021年11期)2021-05-25
中原商报·科教研究(2021年6期)2021-05-13
民用飞机设计与研究(2020年4期)2021-01-21
弹箭与制导学报(2020年4期)2020-09-17
百科探秘·航空航天(2020年8期)2020-07-29
机械工程师(2020年5期)2020-06-19
军民两用技术与产品(2019年12期)2020-01-19
民用飞机设计与研究(2019年2期)2019-08-05
民用飞机设计与研究(2019年4期)2019-05-21
装备制造技术(2018年2期)2018-05-07
