基于LMS算法的流体流速测量系统
2015-05-25 10:21周孟然闫鹏程张开远
仪表技术与传感器 2015年6期
王 瑞,周孟然,闫鹏程,张开远
(安徽理工大学电气与信息工程学院,安徽淮南 232001)
0 引言
在煤矿开采的过程中,矿井水害一直都是威胁着矿业安全生产的主要因素,因此,能够全面掌握井下水的特征及流动速度对于矿井安全生产具有重要的指导意义。在此提出一种基于LMS算法的流体流速测量系统,由激光发射器发射出两束激光到管道中,由于水流的运动会使激光的特征发生变化,因此水流的运动特征就会通过光信号显现出来,进而转换为电信号进行数据处理,从而得到所求的流体流速[1]。
1 基本原理
当被测流体在管道内流动时,流体的各种物理量随时间的变化所呈现出随机的性质称之为流动噪声。
本系统流速测量的基本原理如图1所示:A,B分别为两个相同型号的传感器,间距为L,传感器的作用是将其接收的流动噪声信号转换为电信号,这种电信号与流动噪声呈现出一定的关系,可看作是随机信号,接下来对电信号进行数据处理便可得到v。A、B两传感器的输出信号分别为x(t)和y(t),在L距离较小的情况下,x(t)和y(t)的波形基本一致,只是会存在一个延时,这个延时间隔称为D,D值就代表了流体流经两采样传感器A和B时所需的时间,如图2所示。
当D的数值一定时,可知管道里流体的流速为v=L/D[2]。
2LMS算法

图1 测流速基本原理
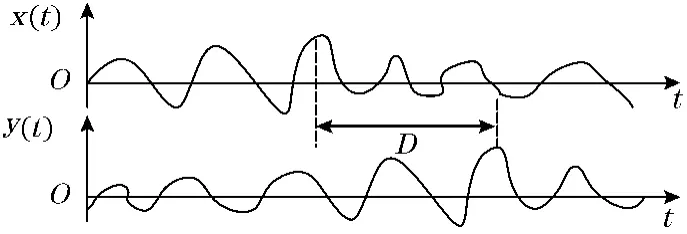
图2 两信号延时时间
LMS(Least mean square),即最小均方算法。LMS算法是一种基于自适应信号处理技术的时延估计方法,它能根据输入信号的外部因素的变化,实现输出反馈自动调整。对于非平稳和时变环境,一些算法并不适用于速度估计,但是LMS算法由于其自身的结构特征可以在某些特殊环境下做良好的速度估计。
LMS算法测量流体流速的基本原理就是根据图1的模型,通过接收的上下传感器传送的信号,测量时间间隔D,在已知上、下传感器间距距离L的情况下,便可以算出其流体速度v。那么,问题就转变成求两个相似信号的时间间隔。LMS算法测时延的基本思想为:首先将时延问题在FIR滤波器中进行建模,用LMS自适应算法进行迭代运算,然后通过FIR滤波器进行参数的自适应实现,从而获得时延估计值,即所要求的时间间隔D,那么便可以算出所要求的流体速度v=L/D。
如图3所示,本文中LMS算法是以x(k)和y(k)分别表示上、下游的传感器传送的信号,x(k)为参考信号,y(k)为延时信号,w(k)是自适应滤波器权系数,en(k)是误差函数,μ为迭代步长,也称为收敛因子,控制着整个系统的稳定性和收敛速度。
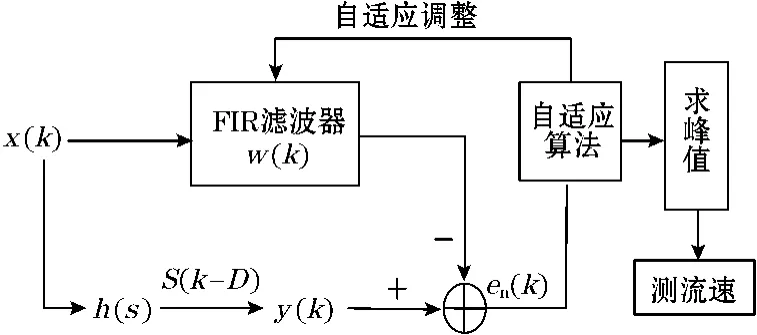
图3 LMS算法流程图
LMS算法大致如下:
(1)把x(k)送入FIR滤波器,完成FIR滤波,得到z(k):

(2)利用当前的延时信号y(k)和步骤(1)得到的z(k)计算系统的输出误差en(k):

(3)利用步骤(2)计算得到的en(k)对自适应滤波器的权系数w(k)进行更新:

(4)将更新后的w(k+1)作为下一次迭代时的滤波系数。
接下来需要用sinc函数对滤波器的权系数进行插值运算,y(k)进行sinc插值,可表示为

式中:sinc(i-D)=sin[π(i-D)]/[π(i-D)]。那么,便可以得到时间延迟为

式中m为滤波器阶数。
正常工作时,自适应滤波器通过en(k)的反馈不断地自动调节w(k),通过数次迭代最终使得误差函数en(k)的均方值达到最小值,此时,自适应滤波器收敛,各权系数w(k)达到最大值,自适应滤波器达到维纳最优解,即

式中:wopt为最优权系数向量;K为与信噪比相关的系数;D为滤波器最优权系数最大值所对应的时间,求得D后便可以求得流体速度为 v=L/D[3-4]。
3 系统总体设计
系统总体结构图如图4所示,发送端由LD(半导体激光器)作为激光源,经过分光器,分路产生两束具有相同特征的激光束由光纤接收并送到接收端PD(光电二极管)中,PD接收到光信号并转化为电信号,这时y(t)就可以看成是x(t)的延时信号,而二者之间的关系特性则取决于水流的运动,因为水流的运动会使水中的激光特征发生改变,从而使得接收的电信号也具有不同的特征,再把接收到的电信号统一送到单片机内部进行数据处理,即可得到所要求的水流流速v。
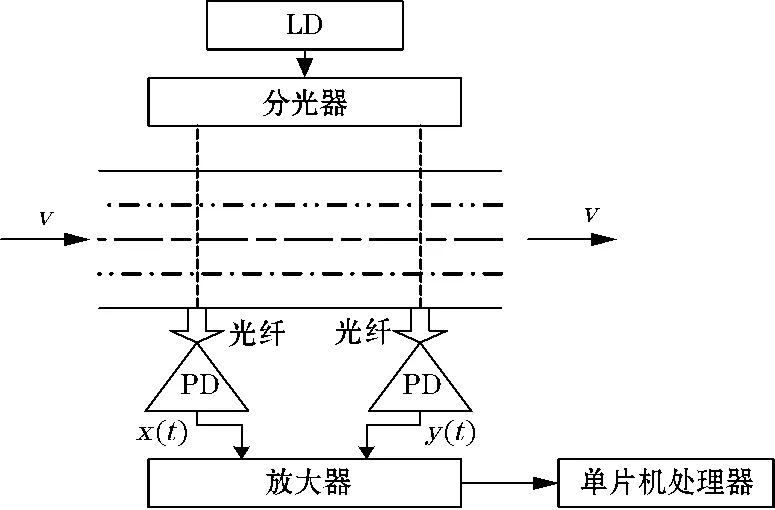
图4 总体结构图
4 系统主要硬件设计
系统的发射端采用激光二极管LD,为1 310 nm GTL-213034的激光二极管,用于产生1 310 nm的激光,其具有较高的稳定性,并且阈值电流较低。LD发出的激光送入分光器一分为二,分光器主要分为拉锥式分光器和光波导分光器两大类,相比而言,拉锥式分光器的附加损耗和偏振相关损耗低、波长隔离度高,所以本系统采用拉锥式FC 1分2光纤分线器,分光比为1∶1,把发射端发送的激光分成两束,然后送入接收光纤中[5]。
系统的接收端由PD、放大电路以及单片机处理系统组成,其具体连接如图5所示。

图5 接收端电路连接图
本系统中的光电二极管PD采用InGaAs PIN75 Module,具有较高的响应度并且具有较宽的动态范围。系统中的PD有3个引脚,引脚1接电源+5 V,引脚3接地,由于PD转换后的电信号幅度比较小,引脚2负责把转化的电信号送入运放中,将其进行放大以便于接下来的数据分析处理。放大电路采用LM324四运放集成电路,PD的引脚2与运放之间需要连接一个电阻R3,该电阻与R4共同控制放大器的增益,通过调节二者的大小来达到所需要的增益倍数[6]。系统中的数据采集及处理模块采用AVR单片ATmega128为主控制器,其具有非常丰富的片上资源,其内部集成了Flash存储器(128 KB),E2PROM(4 KB),还有53个可编程I/O口线和8路10位A/D转换通道,这样就可以省去专门的A/D转换器,使系统效率更高,速度更快。经过光电转换器转换过来的电信号使用A/D转换0通道进行处理,参考电压选择外部AVCC引脚,并且此电压要高于放大电路中放大器输出的最高电压值,以保证A/D转换的准确性[7-8]。
5 系统试验结果分析
试验测试平台选用淮南某矿地面可调速排水设施,为验证试验的结果可靠性,选用两个变量,分别是两传感器之间的距离s和排水速度v,v1为LMS法测量速度,本次测试选用半径30 mm的圆形管道的试验环境,分别进行L取值为10~110 cm的测试,每间隔20 cm取值1次,v取值为9 m/s,测量结果如表1所示。由表1可知,L取值50 cm、70 cm、90 cm的时候,采用LMS算法测量的速度与设定的流速较为接近,误差相对比较小。在L取值30 cm、10 cm以及90 cm、110 cm并且速度v大于4 m/s的时候,测量速度与设定速度偏差逐渐增大,主要是因为当两传感器的距离较大、速度较小的时候,上、下游两传感器接收到的信号失真严重,导致实验的结果误差较大。而当距离较小的时候,两传感器的信号几乎没有发生变化,

表1 LMS法测量速度v1 m/s
同样地,也就造成测量结果出现较大的偏差。所以,在实际工程应用的时候,应严格要求两传感器的间距,以达到精确测量的目的。
6 结束语
对流体流速的测量采用LMS算法,在ATmega128主控制器上搭建硬件,不仅能够有效地提高最小均方算法的运算速度,而且由于LMS算法的特殊性,可以有效增加系统的抗干扰能力,在复杂多变的工程环境中更能提高测量的精确度。
[1]李良.气固两相流静电相关流速测量研究:[学位论文].天津:天津大学,2008.
[2]王俊峰.一种改进的变步长LMS算法及其DSP实现.仪表技术与传感器,2012(11):128-129.
[3]王宏禹,邱天爽.自适应噪声抵消与时间延时估计.大连:大连理工大学出版社,1999:20-21.
[4]SO H C,CHING P C.Comparative study of five LMS -based adaptive time delay estimators.IEEE Proceedings of Radars,Sonar and Navigation,2001(1):9 -15.
[5]周真,杨军,秦勇.基于PIN光电二极管的光功率计.仪表技术与传感器,2013(6):43-45.
[6]贾方秀,丁振良,袁峰.半导体激光器高频调制系统的研究.仪表技术与传感器,2009(3):78-80.
[7]张桂香,姚存治.基于ATmega128单片机的智能供电测控系统设计.电力自动化设备,2009,29(8):136 -139.
[8]崔丽,叶先明.基于AVR单片机的直流无刷电机智能控制系统设计.仪表技术与传感器,2009(11):34-36.
猜你喜欢
初中生学习指导·提升版(2022年4期)2022-05-11
中学生数理化·八年级物理人教版(2022年4期)2022-04-26
成都信息工程大学学报(2021年4期)2021-11-22
大众科学(2020年7期)2020-10-26
电子制作(2019年11期)2019-07-04
科技传播(2019年24期)2019-06-15
小天使·六年级语数英综合(2018年1期)2018-10-08
电子制作(2018年16期)2018-09-26
电子制作(2018年1期)2018-04-04
北京航空航天大学学报(2017年9期)2017-12-18