
含摩擦碰撞柔性机械臂动力学研究
2015-05-10 03:05钱震杰章定国
振动工程学报 2015年6期
钱震杰, 章定国
(南京理工大学理学院, 江苏 南京 210094)
含摩擦碰撞柔性机械臂动力学研究
钱震杰, 章定国
(南京理工大学理学院, 江苏 南京 210094)
研究了由柔性杆、柔性铰构成的机械臂的斜碰撞动力学问题。首先,采用高次刚柔耦合理论、应用Lagrange方程得到系统的递推动力学模型。然后,引入碰撞力势能,运用连续法建模获得碰撞力所对应的广义力,得到系统的碰撞动力学方程。采用Hertz接触模型和Coulomb摩擦光滑修正模型分别建立法向和切向碰撞模型,提出碰撞/分离切换准则。通过光滑化处理摩擦接触,提高了大型复杂柔性多体系统含摩擦碰撞全局动力学的计算效率。最后对国际空间站机械臂Canadarm2的简化模型斜碰撞过程进行仿真,验证了所提模型和算法的有效性。
斜碰撞; 摩擦; 柔性多体系统; 动力学仿真
引 言
摩擦与碰撞振动是导致大型柔性机构动力学非光滑、高度非线性问题的主要因素。柔性多体系统变形描述、接触模型、stick-slip现象分析、接触/分离切换、碰撞检测、以及碰撞算法等都是研究的重点和难点。
针对多体系统的碰撞模型问题,Whittaker[1]最早对多刚体系统的斜碰撞进行研究,提出单向滑动和黏滞两种接触模式,利用Coulomb摩擦定律描述法向和切向冲量之间的关系。Kane[2]发现前者方法会导致碰撞后系统能量的增加,提出Kane 动力学之谜。研究发现:该现象出现的主要原因是忽略了切向滑动方向转换和黏滞带来的摩擦力大小、方向的变化。Stronge[3]以自由物体与平面斜碰撞为对象分析了斜碰撞过程的能量变化及碰撞前后速度关系,建立了黏滞/滑动摩擦接触的动力学模型。Brach[4]和Keller[5]研究了斜碰撞中切向微滑动,以及法向变形与切向变形的同步和耦合关系。Glocker 和Pfeiffer[6]基于Poisson假设建立了多刚体系统的含摩擦多点碰撞模型,研究了不同接触状态的切换问题。赵振[7]等针对三维含摩擦的多刚体碰撞问题,以Poisson恢复系数判断碰撞状态,分析了切向运动和法向冲量的耦合关系。刘才山等[8]针对柔性单杆碰撞问题,提出了满足边界条件的法向非线性弹簧阻尼模型和切向接触模型。刘锦阳等[9]运用Hertz接触和Coulomb摩擦定律建立法向和切向碰撞模型,研究了柔性梁斜碰撞问题。阎绍泽等[10]建立了含间隙空间可展机构考虑经典碰撞和接触变形的动力学模型,并分析比较了四类间隙铰模型。齐朝晖等[11]对多体系统铰内摩擦接触问题进行了详细研究。胡海岩等[12]对大型网架式空间结构展开过程中的多柔体系统动力学建模、运动副内碰撞等非线性动力学问题进行了详细的分析和总结。
根据不同的碰撞过程假设,目前含碰撞非光滑系统的建模主要有冲量-动量法、连续碰撞力法、附加约束法等。连续碰撞力法是一种以弹簧阻尼力元代替接触区域复杂变形的近似方法。此法不仅解决了刚性碰撞理论中切向摩擦引起的数值不稳定和能量不一致问题,而且能简易地求解撞击力,碰撞速度以及接触时间等。虽然其计算结果的准确性受到模型参数选择的影响,但在处理低速碰撞时仍有较高的精度,因此在航天器对接等领域广泛应用。Khulief和Shabana[13]将线性弹簧阻尼模型引入到多体系统碰撞动力学的研究中。王琪等[14]针对多刚体系统研究了双面约束多点摩擦问题,总结了非光滑多体系统动力学的数值算法[15]。姚文莉等[16]提出一种滑动模式步进算法,解决含铰摩擦的多刚体系统的碰撞前后能量不协调问题。金栋平等[17]基于步进冲量法,深入研究了两弹性体含摩擦斜碰撞中的法向压缩/恢复、切向微滑正向/逆向等问题。洪嘉振等[18]详细总结了柔性多体系统碰撞动力学建模理论、数值算法和实验方面的进展情况。
常规数值方法处理含摩擦接触的非光滑系统时,存在降阶和精度较低的问题,黏滞时数值易发生不稳定。为此学者们提出了光滑化方法[19]、黏着区判断法[20]、事件驱动法[21]等解决方案。其中光滑化方法将不可微的函数转化为一个可微函数,利用反正切、双曲正切或样条函数等光滑函数逼近干摩擦定律,进而采用一般的光滑优化算法求解。此法无需额外方程或变量,通过适当的光滑化处理,解决了模型奇异性导致的数值不稳定问题,起到了平滑振荡的数值效果。虽然此法有一定的近似性,但如将光滑化参数取得足够小,便可得到充分精确的解。因此,光滑化方法不失为一种工程应用的有效方法。 Kikuchi[22]和Wriggers等[23]研究了光滑化接触算法,给出了插值函数。Mostaghel 和Davis[24]提出了运用4种连续函数分段近似描述摩擦力的建模方法。李兴斯等[25]基于凝聚函数法的光滑化技术研究了摩擦接触问题。
针对柔性多体系统的含摩擦碰撞问题,需要解决碰撞、摩擦引起的变边界、高瞬态、数值稳定性问题,因此建立数值性能较好、合理的接触模型和算法至关重要。本文采用高次刚柔耦合理论建立柔性多体系统动力学模型。通过Lagrange方程得到递推动力学方程。引入碰撞力势能的概念,通过连续法建模得到碰撞动力学方程。采用Hertz接触模型建立法向接触模型,给出切向Coulomb摩擦的光滑修正模型,以及碰撞/分离切换准则。最后对国际空间站机械臂Canadarm2的简化模型斜碰撞问题进行了仿真分析。
1 动力学方程
柔性机械臂由n个柔性杆和n个转动铰构成(见图1)。设基座坐标系为O-XYZ,碰撞面ΓB坐标系为O'-X'Y'Z'。运用4×4齐次变换矩阵和Denavit-Hartenberg (D-H)坐标法来描述系统的运动和变形。

图1 柔性机器人碰撞示意图Fig.1 The flexible system collision schematic
柔性机械臂杆k上一点P与接触面ΓB发生点-面碰撞接触。点P在基座坐标系O-XYZ中表示为
hk=Wkkhk
(1)
式中Wk为基座坐标系到第k杆坐标系的齐次变换矩阵,khk表示点P在k杆连体坐标系中的位置矢量,

(2)
(3)

(4)
式中xkj,ykj,zkj分别表示k杆的x,y,z三个方向的第j阶模态的变形位移,Nk为第k杆的模态截断数,δkj为杆k的第j阶模态坐标,xkjf表示由横向弯曲引起的轴向缩短项,即高阶几何非线性耦合项,下划线项表示高次耦合项或由其产生的导出项。
采用连续接触力法建立碰撞过程模型,引入碰撞力势能
(5)

进入碰撞阶段后,由于碰撞力强度大且变化剧烈,迅速激发高频模态,动力学方程易不稳定,求解步长需要缩小,求解速度明显下降。因此,问题的多尺度性和非连续性要求系统的耦合变形描述和方程数值求解有更高的精度。这里,柔性杆为细长杆,采用Euler-Bernoull梁假设,考虑轴向拉伸变形、轴向高阶几何非线性耦合变形、横向弯曲变形、以及扭转变形;铰计入柔性和质量效应。
运用第二类Lagrange方程描述系统含摩擦的斜碰撞过程,归纳总结得到非碰撞阶段和碰撞阶段的动力学方程分别为:
(6)
(7)
式中J为系统的广义质量阵,RI为除碰撞力外的所有主动力、部分惯性力产生的广义力,z为广义坐标列阵,见文献[26]。通过碰撞力势能,求得对应的碰撞广义力RII为:
(8)

(9)
(10)

2 接触模型
针对多体系统斜碰撞动力学问题,学者们对切向摩擦、法向接触是否同步和耦合关系进行了大量研究。Johnson[27]认为切向变形对法向变形的影响很小,尤其是当碰撞物体的材料相同时,切向变形的影响甚微,即正碰撞的法向撞击力模型适用于斜碰撞问题。Lewis和Rogers的研究[28]表明,对单向微滑动而言,斜碰撞过程中法向与切向碰撞力的时间变化历程是同步的。目前现有的研究中,通常认为切向摩擦系数与法向恢复系数是相互独立的。
2.1 法向接触模型
在Hertz接触理论和非线性弹簧阻尼模型[29]的基础上,Lankarani-Nikravesh建立了L-N连续接触力模型[30],提出通过物体碰撞前后动能损失来确定接触阻尼,其法向碰撞力与变形的非线性关系为
(11)

2.2 切向摩擦模型
系统摩擦所产生的stick-slip涉及动摩擦和静摩擦状态的切换,经典库仑摩擦定律将引起数值困难。在不考虑系统的stick-slip运动状态切换时,即不考虑摩擦的静态特性时,可以将切向摩擦力光滑化处理,把黏滞阶段处理为一个相对速度为零的小邻域,去掉表征摩擦力方向的符号函数。修正之后摩擦力仅与相对切向速度有关,与相对切向加速度无关。
联邦、州和地方多个部门设立基金和针对再生水资金支持项目计划的外生融资主要用于项目建设,运行维护和更替费用则主要依赖使用费、物业税、用户付费、公共设施税收返还、特种税、增容费等收入渠道的内生融资体系。这使得再生水项目在得到必要外部支持的同时,通过努力改善经营而获得充足的收入。由于原则上要求用户承担全部运营更替成本,其内生融资的费率体系充分体现了清晰的商业原则。
(12)
式中cf为摩擦系数,cd为一个动态的校正系数,是关于vT的分段函数。这里考虑3种摩擦修正模型,具体情况如下:
Ⅰ.Coulomb摩擦分段函数模型[31]:为解决摩擦力方向改变后出现切向速度为空值的问题,将动态校正因子cd视为关于切向速度公差的函数
(13)
式中 两个临界速度v0,v1为常值,当相对切向速度的绝对值在0~v0范围内时,摩擦力为零,接触处于粘滞状态;其值在v0~v1范围内时,静摩擦系数随之变化;其值大于v1时,接触处于滑动状态。
Ⅱ. 近似Coulomb摩擦光滑模型[31]:此模型避免了摩擦力与相对切向加速度的耦合给数值计算带来的困难
(14)
其中cT为切向碰撞恢复系数,vr1,α为大于0 的常值,α的值越大,曲线越陡。
Ⅲ. 1902年Stribeck观察到:当克服静摩擦力后摩擦力不是连续地下降,而是在低速下随着速度的增加而减小,呈现为速度的连续函数,即负斜率摩擦现象。这里,考虑Stribeck效应的近似Coulomb摩擦模型[32]
(15)
其中
(16)

(17)

2.3 状态切换准则及算法实现
柔性机械臂杆k上一点P与接触面ΓB发生点-面碰撞接触,如图2所示。WB为基座坐标系至接触面ΓB坐标系的齐次变换矩阵,rk表示接触点Q在接触面ΓB坐标系中的位置矢量。

图2 点-面碰撞接触示意图Fig.2 The node-to-surface collision schematic
因此,接触对法向和切向距离gN和gT为:
(18)
(19)
(20)
(21)
(22)
(23)

(24)

(25)


3 数值仿真

图3 空间机械臂Canadarm2简化模型Fig.3 A simplified model of Canadarm2


表1 机械臂柔性杆参数
由程序实时计算得到,碰撞初始速度为vx=-0.516 46 m/s,vy=-6.401 82 m/s,vz=-0.003 78 m/s。
在第 Ⅰ 种Coulomb摩擦分段函数模型中:摩擦系数cf=0.1,校正系数cd中常数参数v0=0.001 m/s,v1=0.05 m/s。法向碰撞力和切向滑动速度由程序实时计算获得。图4是碰前杆2末端加速度。

图4 碰前杆2末端加速度Fig.4 Acceleration of Link-2 tip before impact
在碰撞前,随着运动速度的增加,沿杆连体坐标系x向和z向振动幅值较小,而沿y向由于考虑了高阶刚柔耦合变形项,振动幅值较大。

图5 法向碰撞力和切向碰撞力Fig.5 The normal and the tangential impact forces
法向碰撞力和切向摩擦力如图5所示。在tstart=0.646 663s碰撞开始,结束时间tend=0.650 660s,持续时间为0.003 997s。在1次碰撞内有3次法向和切向冲击力峰值,碰撞激发柔性构件的高次刚柔耦合振动,1次碰撞内发生多次颤振。图6是碰撞中杆2末端变形量,显见冲击力使得柔性杆变形量超过20%,达到大变形状态。图7是碰撞中杆2末端变形速度。沿杆连体坐标系y向的振幅峰值与冲击力3次峰值一一对应。
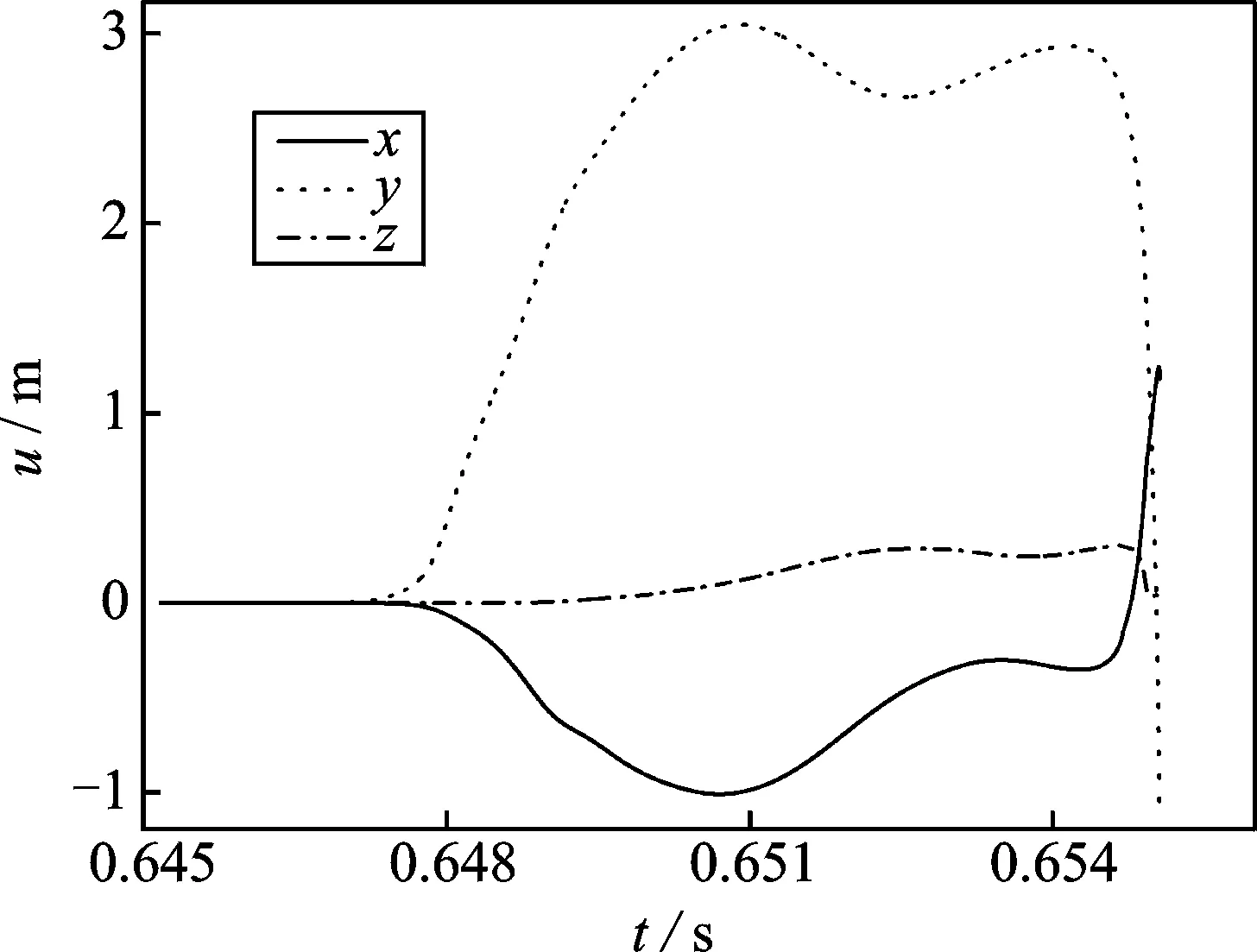
图6 碰撞中杆2末端的变形量Fig.6 Deformation at Link-2 tip during impact
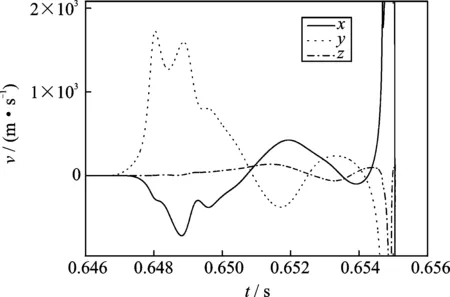
图7 碰撞中杆2末端的变形速度Fig.7 Deformation speed of Link-2 tip during impact

图8 碰撞中接触点切向速度Fig.8 Tangential velocity of contact point

在第Ⅲ种考虑Stribeck效应的近似Coulomb摩擦模型中:静、动摩擦临界速度为vs=0.04 m/s,vd=0.05 m/s,静、动摩擦系数为μs=0.95,μd=0.85。法向碰撞力和切向滑动速度由程序实时计算获得。通过仿真可以得到,碰撞开始时间为tstart=0.646 663 s,结束时间为tend=0.650 203 s,持续时间为0.003 540s。法向冲击力和切向摩擦力如图9所示。在1次碰撞过程中,切向和法向冲击力形成3次峰值,一次碰撞内发生多次颤振。图10 为碰撞中杆1末端变形加速度。在重力场中,柔性系统的高阶耦合变形和碰撞激发了柔性构件的剧烈振动响应。

图9 法向碰撞力、切向碰撞力Fig.9 The normal and tangential impact forces

图10 碰撞中杆1末端加速度Fig.10 Acceleration of Link-1 tip during collision
4 结 论
本文研究了柔性机械臂系统的含摩擦斜碰撞动力学问题。采用高次刚柔耦合理论通过Lagrange方程得到系统的递推动力学模型。引入碰撞力势能,连续法处理碰撞状态,光滑化处理摩擦接触,提高了柔性多体碰撞动力学的计算精度。数值仿真表明,碰撞力激发了柔性杆变形的高阶振动模态;在一次碰撞过程中,发生了多次碰撞,滑动摩擦力多次发生正、逆向的改变。通过连续法处理碰撞过程以及光滑化处理摩擦接触,缩短了已有非光滑力学理论与工程实际应用之间的距离,提高了大型复杂柔性多体系统含摩擦碰撞的全局动力学的计算效率。
[1] Whittaker E T. A Treatise on the Analytical Dynamics of Particles and Rigid Bodies[M]. 4th ed.Cambridge: University Press, London 1937 Reprinted by Dover Publications, New York 1944.
[2] Kane T R. A dynamics puzzle[J]. Stanford Mechanics Alumni Club Newsletter, 1984, 6: 1—4.
[3] Stronge W J, James R, Ravani B. Oblique impact with friction and tangential compliance[J]. Philosophical Transactions of the Royal Society of London. Series A: Mathematical, Physical and Engineering Sciences, 2001, 359(1789): 2 447—2 465.
[4] Brach R M. Rigid body collisions[J]. Journal of Applied Mechanics, 1989, 56(1): 133—138.
[5] Keller J B. Impact with friction[J]. Journal of Applied Mechanics, 1986, 53(1): 1—4.
[6] Glocker C, Pfeiffer F. Multiple impacts with friction in rigid multibody systems[J]. Nonlinear Dynamics, 1995, 7(4): 471—497.
[7] Zhao Zhen, Liu Caishan, Chen Bin.The numerical method for three-dimensional impact with friction of multi-rigid-body system[J].Science in China Series G, 2006, 49(1): 102—118.
[8] 刘才山,陈滨,王玉玲.考虑摩擦作用的多柔体系统点-面碰撞模型[J]. 中国机械工程, 2000, 11(6): 616—619.
Liu Caishan, Chen Bin, Wang Yuling. The point-surface impact model considering the friction effect in flexible multi-body system [J].China Mechanical Engineering, 2000, 11(6): 616—619.
[9] 沈凌杰, 刘锦阳, 余征跃. 柔性梁斜碰撞问题的非线性动力学建模和实验研究[J]. 力学季刊, 2007, 27(4): 568—577.
Shen Lingjie, Liu Jinyang, Yu Zhengyue. Nonlinear dynamic modeling and experiment investigation for a flexible beam with oblique impact[J]. Chinese Quartrtly of Mechanics, 2007, 27(4): 568—577.
[10]阎绍泽,陈鹿民,季林红,等.含间隙铰的机械多体系统动力学模型[J]. 振动工程学报, 2003, 16(3): 290—294.
Yan Shaoze, Chen Lumin, Ji Linhong, et al. Dynamic modeling of multibody system with clearance joints[J]. Journal of Vibration Engineering, 2003, 16(3): 290—294.
[11]齐朝晖, 罗晓明, 黄志浩. 多体系统中典型铰的摩擦力计算模型[J]. 动力学与控制学报, 2008, 6(4): 294—300.
Qi Zhaohui, Luo Xiaoming, Huang Zhihao. Frictions in joints of multibody systems[J]. Journal of Dynamics and Control, 2008, 6(4): 294—300.
[12]胡海岩, 田强, 张伟, 等. 大型网架式可展开空间结构的非线性动力学与控制[J]. 力学进展, 2013, 43(4): 390—414.
Hu Haiyan, Tian Qiang, Zhang Wei, et al. Nonlinear dynamics and control of large deployable space structures composed of trusses and meshes[J]. Advances in Mechanics, 2013, 43(4): 390—414.
[13]Khulief Y A, Shabana A A. A continuous force model for the impact analysis of flexible multibody systems[J]. Mechanism and Machine Theory, 1987, 22(3): 213—224.
[14]彭慧莲, 王士敏, 王琪, 等. 双面约束多点摩擦多体系统的建模和数值方法[J]. 力学学报, 2009, 41(1): 105—112.
Peng Huilian, Wang Shimin, Wang Qi, et al. Modeling and simulation of multi-body systems with multi-friction and fixed bilateral constraint[J]. Chinese Journal of Theoretical and Applied Mechanics, 2009, 41(1): 105—112.
[15]王琪, 庄方方, 郭易圆, 等. 非光滑多体系统动力学数值算法的研究进展[J]. 力学进展, 2013, 43(1): 101—111.
Wang Qi, Zhuang Fangfang, Guo Yiyuan, et al. Advances in the research on numerical methods for non-smooth dynamics of multibody systems[J]. Advances in Mechanics, 2013, 43(1): 101—111.
[16]姚文莉, 陈滨, 刘才山, 等. 含摩擦的多刚体系统碰撞问题的滑动状态步进法[J]. 应用数学和力学, 2007, 28(12): 1 448—1 454.
Yao Wenli, Chen Bin, Liu Cai-shan, et al. Sliding state stepping algorithm sloving impact problems of multi-rigid-body system with joint friction[J].Applied Mathematics and Mechanics, 2007, 28(12): 1 448—1 454.
[17]韩维,金栋平,胡海岩.两自由度斜碰撞-振动系统动力学研究[J].力学学报,2003,35(6): 723—728.
Han Wei, Hu Haiyan, Jin Dongping. Analysis of oblique impact of a vibrating system of two degrees of freedom[J]. Acta Mechanica Sinica, 2003, 35(6): 723—728.
[18]董富祥, 洪嘉振. 多体系统动力学碰撞问题研究综述[J]. 力学进展, 2009, 39(3): 352—359.
Dong Fuxiang, Hong Jiazhen. Review of impact problem for dynamics of multibody system[J]. Advances in Mechanics, 2009, 39(3): 352-359.
[19]Kim T C, Rook T E, Singh R. Effect of smoothening functions on the frequency response of an oscillator with clearance non-linearity[J].Journal of Sound and Vibration, 2003, 263(3): 665—678.
[20]Olsson H, Åström K J, Canudas de Wit C, et al. Friction models and friction compensation[J]. European Journal of Control, 1998, 4(3): 176—195.
[21]张继锋, 冯奇. 摩擦动力系统中两种非光滑现象及其算法研究[J]. 噪声与振动控制, 2007, 27(5): 38—41.
Zhang Jifeng, Feng Qi. Two kinds of non-smooth phenomena in a friction dynamical system and computational methods[J]. Noise and Vibration Control, 2007, 27(5): 38—41.
[22]Kikuchi N. A smoothing technique for reduced integration penalty method in contact problems[J]. International Journal for Numerical Methods in Engineering, 1982; 18:343—350.
[23]Wriggers P, Krstulovic-Opara L, Korelc J. Smooth C-1 interpolations for two-dimensional frictional contact problems[J]. International Journal for Numerical Methods in Engineering 2001, 51(12):1 469—1 495.
[24]Mostaghel N, Davis T. Representations of coulomb friction for dynamic analysis[J]. Earthquake Engineering and Structural Dynamics, 1997, 26(5): 541—548.
[25]宣兆成, 李兴斯. 接触分析的光滑模型及迭代算法[J]. 力学学报, 2001, 33(3): 340—348.
Xuan Zhaocheng, Li Xingsi. Smooth model and iteration algorithm for contact analysis[J]. Acta Mechanica Sinica, 2001, 33(3): 340—348.
[26]Zhenjie Qian, Dingguo Zhang, Liu Jun. Recursive formulation for dynamic modeling and simulation of multilink spatial flexible robotic manipulators[J].Advances in Mechanical Engineering, Volume 2013(2013), Article ID 216014, 15.
[27]Johnson K L. Contact Mechanics[M]. Cambridge: Cambridge University Press, 1985.
[28]Lewis A D, Rogers R J. Experimental and numerical study of forces during oblique impact[J]. Journal of Sound and Vibration, 1988, 125(3): 403—412.
[29]Hunt K H, Crossley F R E. Coefficient of restitution interpreted as damping in vibroimpact[J]. Journal of Applied Mechanics, 1975, 42(2): 440—445.
[30]Lankarani H M, Nikravesh P E. A contact force model with hysteresis damping for impact analysis of multibody systems[J]. Journal of Mechanical Design, 1990, 112(3): 369—376.
[31]Flores P, Ambrósio J, Claro J C P, et al. Kinematics and Dynamics of Multibody Systems with Imperfect Joints: Models and Case Studies[M]. Springer-Verlag, Berlin Heidelberg, 2008.
[32]虞磊, 赵治华, 任启鸿, 等. 基于绝对节点坐标的柔性体碰撞仿真[J]. 清华大学学报(自然科学版), 2010, 50(7): 1 135—1 140.
Yu Lei, Zhao Zhihua, Ren Qihong, et al. Contact simulations of flexible bodies based on absolute nodal coordinates[J]. Journal Tsinghua University (Sci & Tech), 2010,50(7):1 135—1 140.
[33]Nguyen P K, Hughes P C. Teleoperation: from the space shuttle to the space station [J]. Progress in Astronautics and Aeronautics, 1994, 161:353—410.
Frictional impact dynamics of flexible manipulator arms
QIANZhen-jie,ZHANGDing-guo
(School of Science, Nanjing University of Science and Technology, Nanjing 210094, China)
In this paper, frictional impact dynamics is proposed for the flexible manipulator arms with high-order rigid-flexible coupling effect. Firstly, the system here is an assembly ofnflexible links connected bynrotary joints. All link flexibility, namely transversal, longitudinal, torsional and high-order flexible-rigid coupling deformation are included in this model. The 4×4 homogeneous transformation matrices are used to describe the kinematics of system and the recursive strategy for kinematics is adopted. Secondly, the contact/detachment is developed in a consistent manner by introducing the concept of impact force potential energy. The Hertz contact model is utilized to obtain the normal impact force. The tangential impact force is carried out in a smooth processing by modified Coulomb’s friction laws. The continue approach for contact/detachment and smoothed contact model are implemented as an explicit formulation which is suitable for real-time applications and improving the global dynamics computational efficiency for complex multi-body systems with frictional impact. Finally, a simplified model of Canadarm2 is illustrated to demonstrate the accuracy and efficiency of the presented approach and algorithms.
oblique impact; friction; flexible multi-body system; dynamics simulation
2014-08-29;
2015-05-12
国家自然科学基金资助项目(11272155, 11132007);江苏省“333”工程资助项目(BRA2011172);中央高校基本科研业务费专项资金资助项目(30920130112009)
O313; O322
A
1004-4523(2015)06-0879-08
10.16385/j.cnki.issn.1004-4523.2015.06.004
钱震杰 (1985—),女,博士研究生。E-mail: qianzhenjie19851125@gmail.com
章定国(1967—),男,教授。电话: (025)84315185;E-mail: zhangdg419@njust.edu.cn
猜你喜欢
机械工业标准化与质量(2022年9期)2022-09-30
中学生数理化·八年级物理人教版(2022年3期)2022-03-16
中学生数理化·八年级物理人教版(2022年3期)2022-03-16
石油沥青(2021年5期)2021-12-02
电脑报(2021年25期)2021-08-27
中学生数理化·八年级物理人教版(2021年3期)2021-07-22
文化创新比较研究(2020年7期)2021-01-13
北京航空航天大学学报(2017年6期)2017-11-23
创新作文(1-2年级)(2016年4期)2016-05-14
中国铁道科学(2015年4期)2015-06-21
