
基于Adams的集装箱装卸搬运机提升机构动力学仿真
2015-05-09 03:47李红勋李梦晗赵子涵王一超
军事交通学院学报 2015年5期
李红勋,李梦晗,赵子涵,王一超
(1.军事交通学院国家应急交通运输装备工程技术研究中心,天津300161;2.军事交通学院综合训练基地,天津300161;3.军事交通学院研究生管理大队,天津300161;4.71357部队,山东 莱阳265206)
近年来集装箱运输得到普遍推广,并呈持续增长趋势,集装箱装卸搬运类装备在此背景下得到迅速发展。目前,国外有多家生产集装箱装卸搬运装备的大型企业,如瑞典的Karlma公司、芬兰的Konecranes公司、澳大利亚的 Mobicon公司等[1]。我国相关装备发展较晚,目前研制的某型集装箱装卸搬运机(以下简称搬运机)拟应用在对装卸效率要求高的专业集装箱码头、集装箱转运站以及集装箱堆场等,具有良好的机动运输性、操作稳定性以及较高的装卸搬运效率。
1 提升方案分析
提升机构是搬运机的主要工作装置,其结构形式决定了搬运机的主要工作性能。陈彤等[2]在分析国外搬运机技术时对吊具和升降系统作了专门介绍。提升机构一般布置在搬运机的两端,通过提升机构与集装箱对接完成集装箱的装卸作业。目前,常见提升方案主要有夹紧臂夹持提升和钢丝绳提升。
1.1 夹紧臂夹持提升
图1所示为采用夹紧臂夹持提升方案的提升机构示意。其提升装置主要由门架、摆动液压缸、夹紧臂、连杆、旋锁及旋锁液压缸组成。其中,门架下端与车架相连,两组对称的夹紧臂通过4个摆动液压缸和两个销轴连接在门架上。夹紧臂分为上、下两部分,上夹紧臂截面尺寸大于下夹紧臂,下夹紧臂插入上夹紧臂中,利用插销连接。集装箱移位作业时,上、下夹紧臂由3个插销连接,由摆动油缸推动夹紧臂,使旋锁插入集装箱角件孔中,然后用旋锁油缸将旋锁锁紧[2]。

图1 采用夹紧臂夹持提升的机构示意
1.2 钢丝绳提升
近年来,钢丝绳提升装置广泛应用在起重吊装、物料搬运、船舶装卸等领域。图2为采用钢丝绳提升方案的提升机构示意。其提升装置主要由门架、钢丝绳—滑轮总成、提升油缸和提升梁组成。其中,提升梁上安装有夹紧装置、对中装置、旋锁总成等,是搬运集装箱的直接构件。由旋锁锁紧集装箱后,提升梁可通过钢丝绳带动集装箱提升和下落。

图2 采用钢丝绳提升的机构示意
1.3 方案比较
通过前面两种方案的分析可以看出,采用夹紧臂夹持提升时,当旋锁与集装箱锁紧后,集装箱相当于与整个搬运机构固联在一起,刚性较好。因此,在整个搬运机搬运作业过程中,几乎不会出现集装侧移、倾斜的现象。但由于集装箱角件侧面孔较小,搬运机与集装箱对接操作难度大,并且旋锁插入和脱出不顺畅,从而影响整机的作业时间。而采用钢丝绳提升时,由于提升梁上安装有导向装置和对中装置,从而极大地方便了搬运机与集装箱对接,提高了提升作业效率,缩短了整机作业时间,可以很好地达到技术战术指标要求。因此,该搬运机选用钢丝绳提升方案。但由于钢丝绳装置本身容易受到外力冲击而导致集装箱发生偏移,滑轮组也有可能因冲击力造成损坏,威胁到搬运机的作业安全,因此,为保证整机提升作业的稳定性,需要对钢丝绳提升方案进行必要性分析。
2 动力学模型构建
2.1 钢丝绳模型
在Adams/View中可以使用的建立钢丝绳模型的方法主要有3种:通过生成柔性体的方法建立模型;采用多段的圆柱刚性体通过轴套力模拟钢丝绳;采用多段的圆柱刚性体通过旋转副模拟钢丝绳[4]。
本文采用多段圆柱形刚体近似代替钢丝绳方法,建立钢丝绳模型的小段刚体之间通过轴套力连接。在Adams/View中建立的钢丝绳仿真模型如图3所示。

图3 钢丝绳仿真模型
2.2 提升机构模型
本文只对某型搬运机的提升机构加以研究,因此,只需建立提升机构和集装箱的动力学模型即可。根据某型搬运机的总体结构布置,首先确定各滑轮和提升活塞杆的硬点坐标,建立其动力学仿真模型[5];之后,在钢丝绳建模的基础上,在钢丝绳底部建立方形刚体代替集装箱,其质量为12 t,在集装箱底部建立方块模拟地面。建立的提升机构仿真模型如图4所示,其中,滑轮1—3为定滑轮,滑轮4为动滑轮。

图4 提升机构仿真模型
2.3 仿真设置
为真实模拟搬运机提升工况,为该动力学模型添加10个约束,依次为:3个定滑轮与大地之间的旋转副,动滑轮与提升活塞杆之间的旋转副,提升活塞杆与大地之间的移动副,钢丝绳顶端与大地之间的固定副,两根钢丝绳与集装箱之间的固定副以及地面方块与大地之间的固定副。除此之外,还需在地面与集装箱之间添加接触,保证使集装箱在被提升之前位置不下降[6]。
根据提升机构的实际运动时间和各液压缸的理论行程,设定活塞杆施加推力F=2.7×105N。为了减少该驱动力对集装箱的冲击,添加STEP函数 STEP(time,0,500,0.3,270 000),表示驱动力经过0.3 s时间从500 N增加到270 000 N,起始值为500 N是为了防止仿真初始时,钢丝绳在自身重力带动下脱落。仿真时,仿真时间设为1.5 s,步数为200。
3 提升工况仿真分析
根据前文设置,运行仿真软件得到集装箱的质心位移、速度和加速度变化曲线(如图5—7所示)和各滑轮受力变化曲线。

图5 集装箱质心位移变化曲线

图6 集装箱速度变化曲线

图7 集装箱加速度变化曲线
可以看出,集装箱随着提升机构提升了1.2 m,正好到达集装箱运输时的高度。但是在仿真过程中发现,由于钢丝绳刚度有限,而提升集装箱的两根钢丝绳长度不一致,所以在同样的拉力下,长钢丝绳会拉伸得更长,导致集装箱在提升后有微小的侧倾角度。集装箱在开始提升时,受到了较大的冲击,数值大概为两个重力加速度,根据经验,集装箱可以承受该冲击。
实际情况下,集装箱提升过程大概要经过几十秒,但是,由于受硬件条件限制,本仿真只用1.5 s完成了提升过程,也就是说本仿真中集装箱提升速度和加速度都偏大。但由于集装箱自身质量较大,加速度的误差对钢丝绳拉力影响不大。因此,滑轮受力应与真实作业工况下较为接近。
如图8、9所示为滑轮1、2和滑轮3受力变化曲线图。
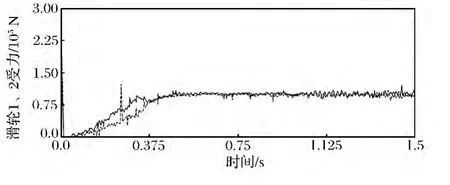
图8 滑轮1、2受力曲线

图9 滑轮3受力曲线
可以看出,仿真刚开始时,3个滑轮都受到了较大的冲击力,分析原因为钢丝绳没有拉紧,在加载的一瞬间滑轮受到冲击力,经分析,实际情况下不会出现类似情况。滑轮1、2受力方向为左上方向,驱动力达到最大值后,稳定在大约90 kN;滑轮3受力方向为水平向右,大小稳定在270 kN,与驱动力大小、变化趋势一致,验证了仿真过程的准确性,为某型搬运机提升机构的进一步研究分析奠定了基础。
4 结语
本文以某型搬运机的钢丝绳提升机构为研究对象,利用Adams软件,建立了近似代替钢丝绳的提升机构动力学模型,并对某型搬运机的提升工况进行了动力学分析。经仿真得到了搬运机在提升集装箱时集装箱受到的冲击以及各定滑轮受力情况,验证了仿真模型的真实可靠,同时为某型搬运机的进一步研究分析提供了合理依据。
[1] 李海波.轻型集装箱跨运车的开发及应用[J].港口装卸,2009,1(1):1-4.
[2] 陈彤,张德文.国外集装箱跨运车的发展现状与技术分析[J].港口装卸,1995(2):4-7.
[3] 刘辉.门架式集装箱装卸搬运机提升机构结构设计与仿真[D].天津:军事交通学院,2010:12-14.
[4] 李海军.ADAMS中钢丝绳索类物体建模方法研究[J].机械管理开发,2007(8):4-7.
[5] 龙靖宇,姚国东.基于Adams的起重机钢丝绳绕组建模与验证[J].煤矿机械,2009,11(30):69-70.
[6] 陈志伟,董月亮.多体动力学仿真基础与实例解析[M].北京:中国水利水电出版社,2012:104-111.
猜你喜欢
沈阳理工大学学报(2022年3期)2022-08-11
科技与创新(2022年13期)2022-07-14
客联(2022年3期)2022-05-31
理化检验(物理分册)(2021年9期)2021-10-08
山东交通科技(2020年2期)2020-08-13
科技创新与品牌(2017年9期)2017-10-20
消费导刊(2016年10期)2016-12-01
中国新技术新产品(2014年21期)2014-03-28
