基于串联LPF和滑模自适应的异步电机DTC研究
2015-04-28 07:03李瀛胡立坤卢子广朱绯
电气传动 2015年6期
李瀛,胡立坤,卢子广,朱绯
(广西大学电气工程学院,广西南宁 530004)
基于串联LPF和滑模自适应的异步电机DTC研究
李瀛,胡立坤,卢子广,朱绯
(广西大学电气工程学院,广西南宁 530004)
为提高异步电机的运行效率和驱动性能,提出一种基于滑模自适应控制理论的定子磁链无速度传感器控制策略,通过Lyapunov理论推导出的自适应收敛律能准确地估计转速;针对传统磁链观测器所存在的纯积分问题,又提出串联一阶低通滤波器(LPF)的改进型磁链观测器,新型磁链观测器没有相位和幅值的偏差,能较好地抑制直流偏移;最后,通过实验验证了所提控制策略的可行性。
异步电机;直接转矩控制;滑模自适应;速度观测器;低通滤波器;磁链观测器
1 引言
在实际的系统应用中,电机驱动一般采用矢量控制和直接转矩控制(DTC)[1]。DTC是一种新型高性能的交流变频调速技术,控制方法简单,转矩响应迅速[2-3]。其中,对于电机转速的采集,最常用的是机械式速度传感器。而速度传感器的安装增加了系统的复杂性、成本和维护要求,降低了系统的可靠性和鲁棒性。目前,出现了许多关于设计无速度传感器估计电机转速和磁链的文章[4]。U.Boader等人曾提出转子转速实时计算方法,但受转矩脉动及系统参数影响较大;Schauder首先提出转子磁链的模型参考自适应方法来设计无速度传感器[5],这种方法比较简单,对扰动和定子电阻变化不是很敏感。文献[6-7]推导出不含磁链的速度观测器,但速度变化较快时有较大的误差。文献[8]设计了全阶磁链观测器模型,改进了无速度传感器矢量控制系统。文献[9]提出的速度观测器,适用于直接转矩控制。直接转矩控制中磁链观测器常采用电压模型法,然而所估计的定子磁链有较大的误差,通常采用一阶LPF代替纯积分[10-12],但会引起相位误差。
本文针对以上问题,提出了滑模自适应无速度传感器和基于串联一阶LPF方法设计的磁链观测器,并通过dSPACE DS1104,QUANSER8(Q8)搭建的实验平台进行实验,结果验证了所提策略的可行性和其所具有的优良性能。
2 异步电机数学模型和系统结构
2.1 异步电机数学模型
静止坐标系下异步电机的数学模型、定子磁链空间矢量角位置以及αβ坐标系下定子磁链和电磁转矩的公式如下:
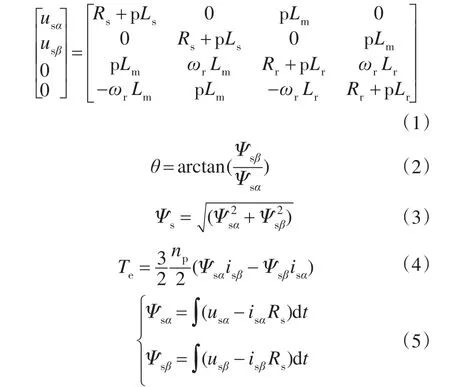
式中:usα,usβ为αβ轴定子电压;Rs,Rr为定转子电阻;isα,isβ为αβ轴定子电流;irα,irβ为αβ轴转子电流;Ψsα,Ψsβ为αβ轴定子磁链;Ψrα,Ψrβ为αβ轴转子磁链;ωr为转子角速度;Ls,Lr为定转子漏感;Lm为定转子互感;Te为电磁转矩;p为微分算子,p=d/dt;np为电机极对数。
2.2 改进的直接转矩系统控制结构
采用所提出的控制策略,直接转矩控制系统结构图如图1所示。
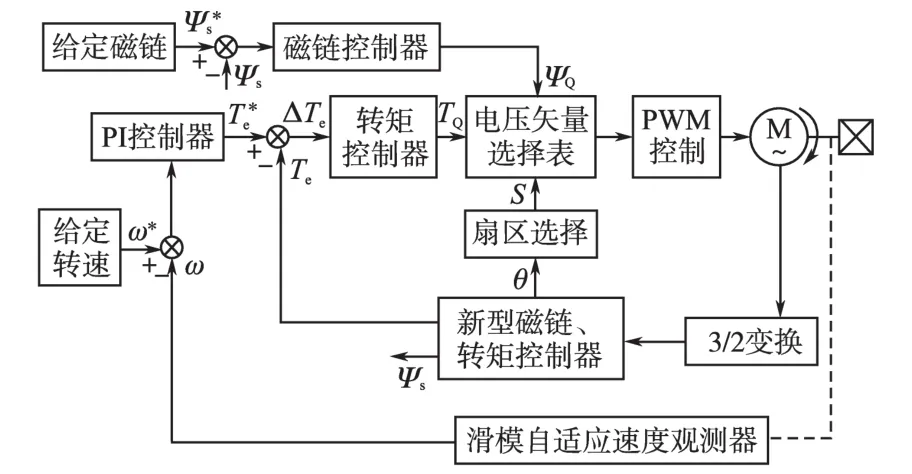
图1 改进型直接转矩控制系统结构框图Fig.1 DTC structural diagram of new schemes
3 速度观测器设计
根据静止坐标系下异步电机数学模型,将定子电流和磁链改写成状态方程的形式,


考虑到转速ωr变化较慢,其值近似为常数,则V的导数为
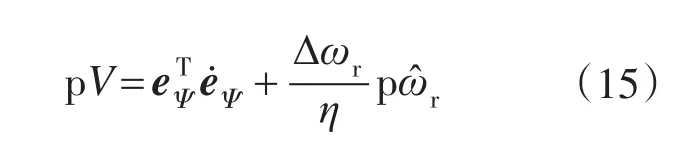
将式(12)和式(13)带入式(15)中得
当y1<0并且y2=0时,pV<0,这满足李雅普诺夫稳定条件,因此,为使y1<0,令
上式就是基于李雅普诺夫稳定性理论的自适应控制律,将其写成比例积分形式为
4 磁链观测器设计
异步电机直接转矩控制中基于定子磁链定向的电压模型法是较常用的磁链观测方法,其公式为Ψs=∫(us-Rsis),电压模型法存在的主要问题是纯积分问题,容易出现积分直流偏移。为此,采用2个一阶LPF串联的方法抑制直流偏移,并实现与积分环节没有相位和幅值偏差。当基波频率ω与截止频率ωc相等时,一阶LPF的幅相频率特性为
由式(20)可知,基波相位滞后了45°,将2个一阶LPF串联可等同积分,传递函数为

幅频特性和相频特性为
为与积分的幅相频率特性一致,将幅值补偿回去得到
则对于基波的幅相频特性为
对频率为0的直流信号,将ω=0带入式(24),得到对于直流信号的幅相频特性为
直流信号不考虑相位问题,而幅值变为原来的2/ωc,电机转速一般都远远大于2 rad/s,所以可以抑制直流信号。
5 仿真建模及实验结果分析
在Matlab/Simulink环境下建立速度观测器模型,仿真模型如图2所示。
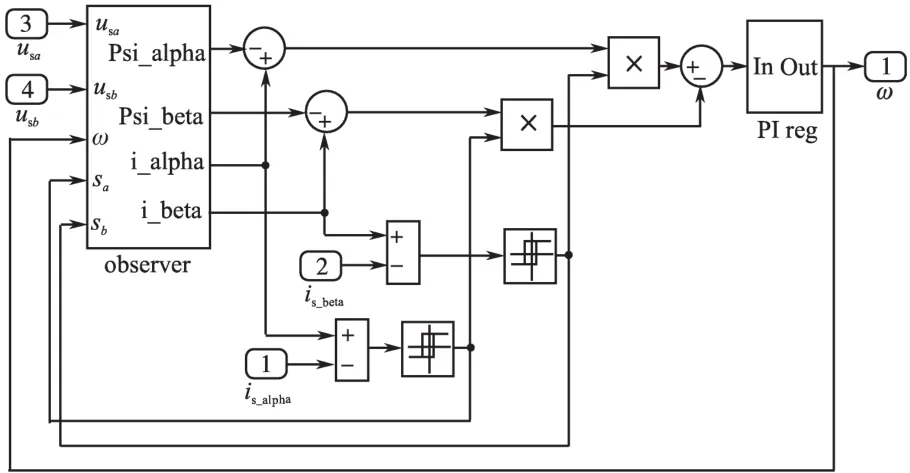
图2 速度观测器仿真模型图Fig.2 Simulation model of speed observer
根据仿真模型图进行实验,实验采用QUANSER8(Q8)和dSPACE DS1104搭建调速实验平台,一套2.2 kW三相异步电机,其中dSPACE DS1104作为控制器进行实时计算、A/D采样、PWM脉冲输出和数据保存。采样频率50 kHz,开关频率5 kHz,死区时间5 μs。异步电动机主要参数为额定电压380 V,额定电流5 A,额定功率2.2 kW,额定转速1 430 r/min,定子电阻3.383 Ω,互感0.28 H,转子电阻2.973 Ω,定子电感0.288 5 H,转子电感0.288 5 H,极对数2。
给定转速由400 r/min升到800 r/min,电机空载运行。滑模自适应方法估计的转速结果如图3a所示。
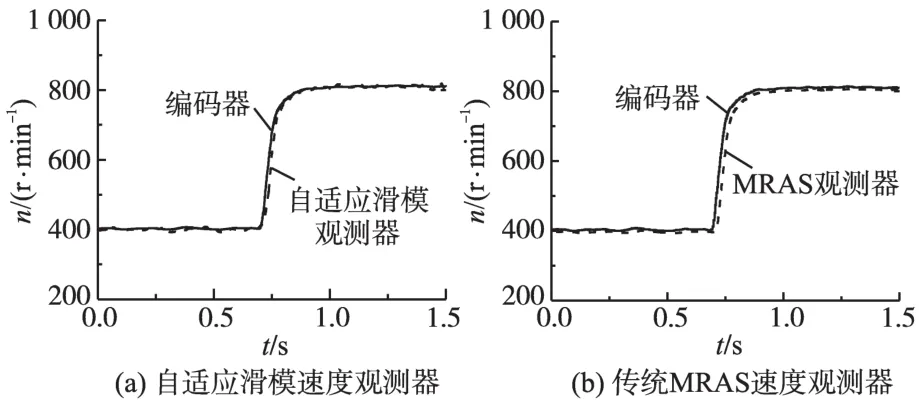
图3 估计的转速结果Fig.3 Speed of the estimation results
由图3a所示,通过与编码器测量的转速进行对比,自适应滑模速度观测器能够精确地估计转速。传统的速度观测器一般采用模糊参考自适应(MRAS)方法设计[14],传统速度观测器估计转速结果如图3b所示。
由图3b所示,传统的MRAS速度观测器也能估计电机的转速。但与自适应滑模速度观测器相对比,从控制系统的稳、快、准角度来分析,自适应滑模可以精准的、无静差的估计转速,几乎没有机械脉动,估算转速时延迟时间也较小。因此,根据自适应滑模方法设计的速度观测器能更好地应用到实际系统中。
将速度观测器和磁链观测器同时应用到电机调速系统中,仍采用dSPACE DS1104实验平台进行调速实验。实验中电机仍空载运行,给定磁链为0.6 Wb,给定转速从200 r/min上升到600 r/min,实验结果如图4所示。
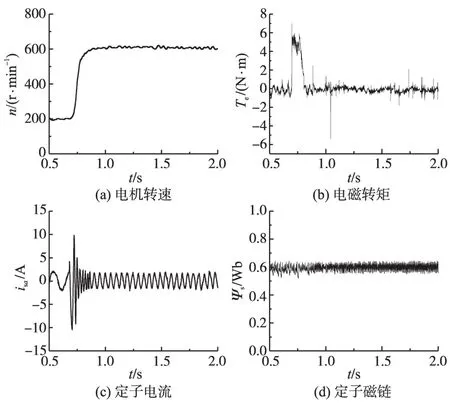
图4 调速系统的实验结果Fig.4 Experiment results of the speed regulating system
当给定转速发生变化时,转速、转矩能迅速响应,调速性能良好,转矩脉动不大,磁链在整个调速过程中一直跟随给定值0.6 Wb。定子电流的频率也随着转速的上升而加快。实验结果验证了滑模自适应速度观测器和改进型磁链观测器的可行性及良好的控制性能。
6 结论
本文提出了滑模自适应速度观测器,通过Lyapunov理论推导出的自适应收敛律来估计转速,在实际应用中代替了编码器准确地估计电机转速;采用串联一阶低通滤波器方法设计磁链观测器,代替了传统控制中的纯积分环节。实验验证了两种观测器的可行性,通过与传统速度观测器对比,更进一步验证了自适应滑模观测器所具有的优良性能。实验过程中电机稳定运行,具有良好的动静态效果。使用新型速度观测器和改进的磁链观测器可以节约系统成本,有效地抑制直流信号,提高了整个电机调速系统的可靠性和鲁棒性。
[1] Casadei D,Profumo F,Serra G,et al.FOC and DTC:Two Viable Schemes for Induction Motors Torque Control[J].IEEE Trans.Power Electronics,2002,17(5):779-787.
[2] Che Changjin,Qu Yongyin.Research on Drive Technology and Control Strategy of Electric Vehicle Based on SVPWM DTC[C]//2011 International Conference on Mechatronic Science,Electric Engineering and Computer,2011:44-49.
[3] Eleftheria S Sergaki,Stavros D Moustaizis.Efficiency Optimization of a Direct Torque Controlled Induction Motor used in Hybrid Electric Vehicles[C]//Acemp-Electromotion,2011:398-403.
[4] Finch J W,Giaouris D.Controlled AC Electrical Drives[J].IEEE Trans.on Industrial Electronics,2008,55(1):1–11.
[5] Schauder C.Adaptive Speed Identification for Vector Control of Induction Motors Without Rotational Transducers[J].IEEE Trans.on Industry Applications,1992,28(5):1054-1061.
[6] Ravi Teja A V.Chakraborty C.A Novel Model Reference Adaptive Controller for Estimation of Speed and Stator Resistance for Vector Controlled induction Motor Drives[C]//IEEE International Symposium on Industrial Electronics(ISIE),2010:1187-1192.
[7] Ravi Teja A V,Chakraborty C,Maiti S,et al.A New Model Reference Adaptive Controller for Four Quadrant Vector Controlled Induction Motor Drives[J].IEEE Trans.on Industrial Electronics,2012,59(10):3757-3767.
[8] 赵金,杨坤.基于自适应观测器的感应电机无速度传感器矢量控制[J].电气传动,2013,43(10):14-17.
[9] 廖永衡,冯晓云,王珍.基于定子磁链滑模观测器的异步电机空间矢量调制直接转矩控制[J].中国电机工程学报,2012,32(18):88-97.
[10]Hurst K D,Hableter T,Griva G,et al.Zero-speed Tacholess IM Torque Control:Simply a Matter of Stator Voltage Integration[J].IEEE Trans.on Industry Applications,1998,34(4):790-795.
[11]俞红祥,吕广强,纪延超.一种基于新型积分算法感应电机定子磁链估计方法的研究[J].电机与控制学报,2005,9(1):68-71.
[12]Cirrincione M,Pucci M.A New Adaptive Integration Methodology for Estimating Flux in Induction Machine Drives[J].IEEE Trans.on Power Electronics,2004,19(1):25-34.
[13]Lei W,Li Y H,Lei X.Sliding Mode Variable-structure MRAS Speed Identification forInduction MotorDirect Torque Control System[C]//Proc.IEEE CCCM.Conf,2009:59-62.
[14] Tejavathu Ramesh,Panda A K,Panda A K.Sliding-mode and Fuzzy Logic Control Based MRAS Speed Estimators for Sensorless Direct Torque and Flux Control of an Induction Motor Drive[C]//2013 Annual IEEE India Conference,2013:1-6.
修改稿日期:2015-01-25
Serial Low Pass Filter and Adaptive Sliding-mode of DTC for an Induction Motor
LI Ying,HU Li-kun,LU Zi-guang,ZHU Fei
(School of Electrical Engineering,Guangxi University,Nanning530004,Guangxi,China)
In order to improve the operational efficiency and drive control performance of the asynchronous motor,a novel scheme on stator-flux speed sensorless observer based on adaptive sliding-mode theory was proposed.The speed observer′s adaptation law was derived based on Lyapunov theorem to ensure estimation stability.With the problem of pure integral for flux observer,a new flux observer with serial low pass filter was also proposed,which can control DC offset without bias of phase and amplitude.Finally,experiments prove the feasibility of the proposed schemes.
induction motor;direct torque control(DTC);adaptive sliding-mode;speed observer;low pass filter(LPF);flux observer
TM343
A
国家自然科学基金(51177018)
李瀛(1992-),女,硕士,研究生,Email:liying0915@163.com
2014-08-02
猜你喜欢
防爆电机(2020年5期)2020-12-14
防爆电机(2020年4期)2020-12-14
防爆电机(2020年4期)2020-12-14
电测与仪表(2016年10期)2016-04-12
铁道科学与工程学报(2015年5期)2015-12-24
华东理工大学学报(自然科学版)(2015年2期)2015-11-07
电测与仪表(2015年19期)2015-04-09
电测与仪表(2014年17期)2014-04-04
电测与仪表(2014年11期)2014-04-04
电测与仪表(2014年11期)2014-04-04