
微电网孤岛工况下基于四桥臂变流器的不平衡负载分配策略
2015-04-14 06:27:30金新民吴学智童亦斌
电工技术学报 2015年12期
周 啸 金新民 唐 芬 吴学智 童亦斌
微电网孤岛工况下基于四桥臂变流器的不平衡负载分配策略
周 啸 金新民 唐 芬 吴学智 童亦斌
(北京交通大学国家能源主动配电网技术研发中心 北京 100044)
为实现负载功率的合理分配,微电网中的变流器并联运行时通常采用基于有功功率-频率、无功功率-电压的下垂控制策略。随着系统中不平衡负载的增加,传统的下垂控制策略已不能保证不平衡负载电流的准确分配。为解决上述问题,本文采用三相四桥臂作为微电网变流器拓扑,分析了负载电流不平衡分量的分配机理以及零序环流的产生原因,提出一种基于负序、零序虚拟阻抗的电流均分策略。该策略与正序功率下垂控制结合,通过设置各序的虚拟阻抗以减小线路阻抗对变流器负载电流分配的影响,实现对负序、零序电流的合理分配。最后,通过实验对所提出的并联控制策略进行验证。实验结果表明,在不平衡负载工况下,采用该控制策略的四桥臂变流器并联运行稳定,能够实现对负序、零序电流的准确均分,并有效抑制零序环流。
微电网 下垂控制 三相四桥臂 不平衡负载 虚拟阻抗
1 引言
近年来,随着全球性化石能源的紧缺,分布式发电技术得到了蓬勃发展。为了克服高渗透率分布式电源对传统配电网的影响,学者们提出了微电网的概念,微电网以其可靠、灵活的运行方式逐渐引起学术界与工业界的广泛关注。其中,作为分布式电源与微电网接口的电力电子变流器在微电网中扮演着重要的角色[1-3]。
目前,在孤岛微电网中,为保证系统的供电可靠性,常采用电压控制模式电压源型变流器(Voltage Control Mode-Voltage Source Converter,VCM-VSC)并联的运行方式[4]。常见的变流器并联控制方法有主从控制、集中控制、平均负载电流分配等基于有互联线的控制方法,这类方法通过高速通信方式能够实现电流的准确分配,但是降低了系统的灵活性与可靠性。考虑到微电网的特点,基于下垂特性的无互联线控制得到了较为广泛的应用[5]。下垂控制仅依赖本地信息,变流器通过预设的下垂曲线来分配负载功率。目前的研究多集中在平衡负载工况下的电流分配,并依据传输线路的特性,分别采用有功功率-频率/无功功率-电压(P-f/Q-V)或有功功率-电压/无功功率-频率(P-V/Q-f)的下垂控制。在微电网系统中,常常需要为不平衡负载供电,不平衡的负载电流中含有负序与零序分量(三相四线制系统),仅采用传统的下垂控制策略,并不能保证并联变流器对负载电流不平衡分量的合理分配[6]。
为了解决孤岛微电网中并联VCM-VSCs对不平衡负载电流的分配问题,文献[6]将变流器控制为一个受控负序导纳(G-),并采用负序无功功率-负序导纳(Q--G-)的下垂控制算法,调节负序导纳以实现多变流器对负序功率的分配,但是该策略易受线路阻抗的影响。文献[7]通过负序无功功率对变流器输出电压的不平衡进行补偿,虽然使变流器端口电压负序分量得到了补偿,但会影响负载电流分配不平衡。文献[8]针对传输线路呈阻性的特点,采用P-V、Q-f下垂控制策略,并结合单相虚拟阻抗,实现不同负载工况下三相电流的自主分配,但该策略不能直接适用于感性线路阻抗下的下垂控制。此外,文献[6-7]以三相三桥臂变流器作为研究对象,不存在零序电流回路,仅考虑了负序电流的分配。在常见的微电网系统中,通常需要三相四线制变流器拓扑同时为单相与三相负载供电,在众多四线制拓扑中,三相四桥臂具有直流电压利用率高、电容需求量低、能够为零序电流提供通路以及控制灵活等优点,得到了较为广泛的应用,尤其适用于负载不平衡工况[9-10]。因此,在四线制变流器并联系统中,负载不平衡时不仅要考虑负序电流的分配,还需考虑零序电流的分配。
本文首先对传统下垂控制在不平衡负载工况下的局限性进行了分析,其次结合三相四桥臂变流器的控制,讨论了四桥臂变流器并联运行时的负载电流分配机理及零序环流问题。根据分析结果,本文提出将正序功率下垂与负序、零序虚拟阻抗结合的并联运行,控制策略以实现对电流不平衡分量进行合理分配为目的。最后通过仿真与实验对所提并联不平衡负载分配策略进行了验证。
2 微电网孤岛工况下不平衡负载分配机理与环流分析
图1所示为孤岛下的三相四线制微电网系统。系统内多台分布式电源(Distributed Generation, DG)通过三相四桥臂变流器传输能量,并经过线路阻抗与公共母线相连。图1中,L为变流器的滤波电感,Ln为中线电感,Cf为滤波电容,Zline为线路阻抗;uoabc为变流器输出电压,uinv为变流器桥臂侧电压。在孤岛微电网中,变流器直流侧由对应的分布式电源或储能装置支撑,通常将其稳定在恒定的电压值。每台变流器采用电压控制模式,以控制输出滤波电容电压为目标。多台电压控制模式变流器并联运行,共同为系统中的负载提供电能。
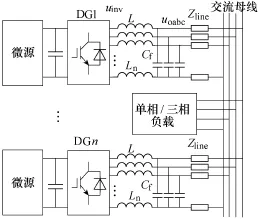
图1 三相四线制微电网系统Fig.1 The three-phase four-wire microgrid system
2.1不平衡负载下传统下垂控制的局限性
与传统变流器并联系统分析相似[11],由图1可得四桥臂变流器并联戴维南等效电路如图2所示。

图2 变流器并联戴维南等效电路Fig.2 Thévenin equivalent circuit of two paralleled converters
图2中,E1∠φ1、Zo1与ZL1分别为变流器1的等效电压源、输出阻抗与线路阻抗;E2∠φ2、Zo2与ZL2为变流器2的等效电压源、输出阻抗与线路阻抗,V∠0为交流母线电压。设Z1、Z2分别为两台变流器的输出阻抗与各自的线路阻抗之和,则有Z1= Zo1+ ZL1,Z2= Zo2+ ZL2,当Z1与Z2呈感性时,Z1≈jX1Z2≈ jX2。以变流器1为例,向负载提供的功率可以表示为
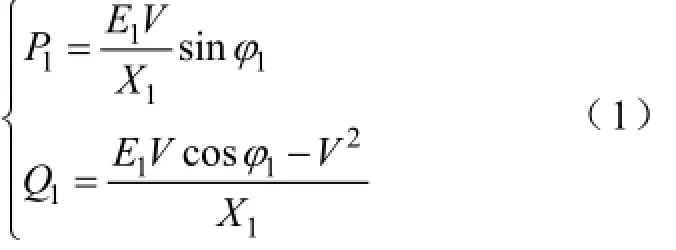
当变流器等效电压源和母线电压之间的相位差足够小时,有sinφ1≈φ1,cosφ1≈1,则变流器并联运行时,变流器输出的有功功率与相位差φ有关,而无功功率与二者的电压幅值差(E-V)相关。该特性类似于电力系统中同步发电机的P-f/Q-V下垂运行特性。因此,在变流器并联运行中同样引入如下的下垂控制思想[1],即

式中,m与n分别为频率与电压下垂曲线的斜率;ω*与E*分别为变流器设定的基准角频率与基准电压幅值。采用下垂控制的变流器控制框图如图3所示。

图3 基于下垂控制的变流器控制框图Fig.3 Diagram of a droop controlled microgrid converter
图3 中,变流器测量电容电压、输出电流等本地信息,再由电容电压和输出电流计算有功功率和无功功率,通过下垂控制得到输出电压幅值E,基波角频率ω,合成下垂控制的参考电压uref,由内环调节器得到调制电压,最后经PWM调制得到变流器的控制脉冲。

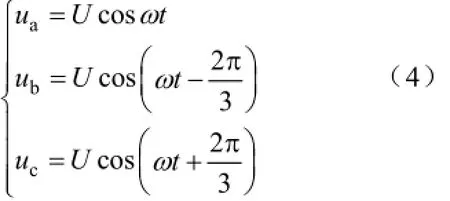
以上分析均基于负载平衡时的并联运行,当系统内存在大量不平衡负荷时,由对称分量法可知,三相负载电流由正序、负序以及零序分量组成,即式中,I为电流幅值,ω为基波角频率,θ为相位,上标+、-、0分别代表正序、负序以及零序。在微电网正常运行时,按照电力系统的要求,三相电压中的负序与零序电压均限定在较小的范围内(如2%),远小于正序电压,因此,进行功率计算时,可认为负载电压是平衡的,电压中的不平衡分量可忽略不计,则三相电压可以表示为式中,U为电压幅值。由式(3)和式(4)计算变流器输出功率为

由式(5)可见,有功功率和无功功率均由两部分组成:正序电压与正序电流相乘得到的平均功率(直流量);负序电流与正序电压引起的2倍基波频率的脉动量。三相零序电流幅值、频率、相位完全一致,与三相对称电压相乘后不产生功率。有功功率和无功功率中存在的功率脉动,将对传统的下垂控制带来扰动,同时并不能保证并联变流器对负载电流不平衡分量的合理分配。四桥臂变流器并联系统不仅要分担正序的平均功率,还需要对负序的脉动功率进行合理分配。零序电流分量在变流器输出功率中没有体现(见式(5)),即使考虑零序电压,其与零序电流作用产生的脉动功率值也较小,因此,很难从功率的角度实现对零序电流的准确分配。
2.2四桥臂变流器负载分配机理
由图1可得四桥臂变流器的正序、负序及零序等效电路如图4所示[12]。图中,uinv为变流器侧电压,i、io分别为电感电流与输出电流,uo为输出端电压,上标+、-、0代表对应的正序、负序与零序分量。

图4 四桥臂变流器各序等效电路Fig.4 Equivalent circuit of a four-leg converter in each sequence
由图4可见,四桥臂变流器的正序等效电路与负序等效电路相同,而零序等效电路略有不同,其零序电感为L+3Ln。为保证不平衡负载下变流器三相输出电压(电容电压)的平衡,可以分别对输出电压的正序、负序及零序分量进行控制,通常采用电容电压外环、电感电流内环的控制结构,分序控制可以用图5所示的框图统一表示[13]。图5中,k=+,-,0,L+,-=L,L0=L+3Ln,、ik、分别为各序输出电压、电压环指令、电感电流与输出电流。GV(s)为电压控制器传递函数,GC(s)为电流控制器传递函数,GPWM(s)为等效的PWM增益,可等效为比例环节。由图5可知,变流器各序电压可以表示为
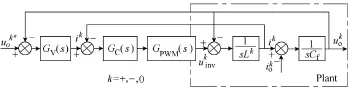
图5 分序控制统一控制框图Fig.5 Unified control scheme of sequence decomposition

式(6)中,H+(s)、H-(s)、H0(s)分别为正序、负序及零序控制系统的闭环增益,(s)、(s)、(s)分别为正序、负序及零序的闭环输出阻抗。在不平衡负载工况下,为消除负载电压中的负序与零序分量,四桥臂变流器各序控制的电压指令一般设定为=uref,==0[12],则式(7)中负序与零序的表达式可以化简为
式(7)说明,在负载不平衡工况下,四桥臂变流器对负序、零序电压的控制实质为调节负序与零序输出阻抗,减小负序、零序负载电流对输出电压的影响。
对于正序并联等效电路,与图2相同,电流的分配由等效电压源的幅值、相位以及等效输出阻抗特性决定,可以通过下垂控制来调节等效电压源实现正序功率的分配。根据式(7),可得四桥臂变流器负序、零序并联等效电路,如图6所示。

图6 四桥臂变流器负序与零序并联等效电路Fig.6 Equivalent circuit of negative and zero sequence of a four-leg converter in parallel
序等效电路为例,变流器1提供的零序电流为

式(8)表明零序电流的分配仅取决于并联系统中变流器的闭环输出阻抗与线路阻抗之和,对负序等效电路进行分析也可得到相似的结论。因此,为实现不平衡负载工况下对负序以及零序电流的分配,通过调节变流器及线路的负序、零序阻抗即可实现。以变流器输出零序阻抗为例,(s)可表示为

负序输出阻抗表达式与零序相同,仅需将零序电感用负序等效电路电感代替即可。由表1所示的变流器硬件参数以及表2所示控制器参数(参见实验部分),可得变流器零序闭环输出阻抗Bode图如图7所示。
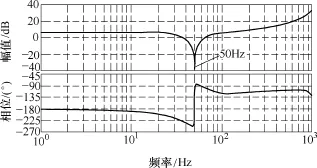
图7 零序输出阻抗Fig.7 Zero sequence output impedance
由图7可见,采用零序控制时,变流器自身的零序闭环输出阻抗很小(约-40B,0.01Ω),线路阻抗的差异将对电流分配效果带来显著的影响,仅依靠变流器自身输出阻抗不足以实现负序或零序电流的准确分配。
2.3四桥臂变流器并联零序环流分析
当四桥臂变流器并联运行时,即使变流器采用独立的直流环节,也存在如图8所示的零序环流。
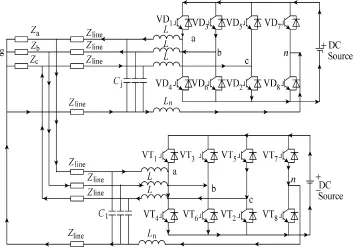
图8 四桥臂变流器并联的零序环流Fig.8 Zero sequence cross current when the four-leg converters parallel operation
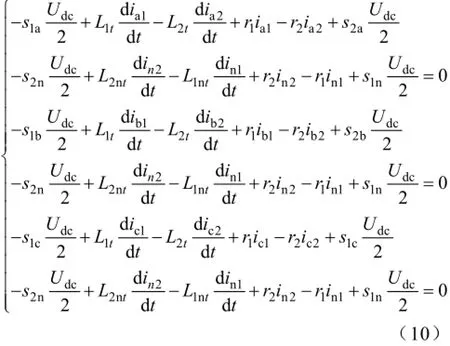
设变量six表示第i台变流器x相桥臂的开关状态,其中,six=1表示对应桥臂的上管开通;six=-1表示对应桥臂的下管开通,x=a,b,c,n。由于电容电流较小,可忽略变流器滤波电容的影响。以两台变流器为例进行分析,i=1,2,可得四桥臂变流器并联时的开关函数电路模型如图9所示。为简化分析,假设两台变流器硬件参数完全一致,Lline为线路电感,r为线路电阻。

图9 四桥臂变流器并联开关函数模型Fig.9 Switching model of four-leg converters in paralel
图9 中,ua=saUdc/2,ub=sbUdc/2,uc=scUdc/2,un=snUdc/2;设L1t=L1+Lline,L1nt=Ln1+Lline,L2t=L2+ Lline,L2nt=Ln2+Lline,根据基尔霍夫电压定律可得
将式(10)中的三个方程相加,同时考虑到
可得环流方程为
式中,s10、s20被定义为三相三桥臂变流器并联时的零序开关函数。式(12)在频域中的表达式为

由式(12)、式(13)可知,该环流不仅取决于变流器的开关状态,还与直流电压、滤波电感以及线路参数等相关。若能够保持各台变流器的开关信号一致,即保证s10=s20,s1n=s2n,则可以避免环流的产生。但是由于微电网内分布式电源变流器各自的工作状态不同,使得调制波存在差异;而变流器晶振上电时刻的差异,将会导致PWM载波存在相位差异。若无通信,则很难保持载波同步。由于存在环流,即使并联变流器在平衡负载下采用下垂控制,仍将导致变流器输出电流之间的不平衡。从图8可以看出,每一相的均流程度均会受到影响,如A相的均流程度可能与C相不同。该环流与变流器直流侧直接并联的零序环流相似,可以通过对零序电流加以控制来抑制[14]。同时由式(13)可知,环路阻抗中的电感分量对于高频环流有抑制作用,但是对于低频环流抑制效果较弱;而电阻分量,不仅可以抑制高频环流,而且能够抑制低频环流。但环流中的高频分量频率已经超过变流器的控制带宽,无法通过控制进行抑制。但对于低频分量,若能够通过控制增大零序环路阻抗,且不增加系统的损耗,则不失为较好的解决方案。
3 基于虚拟阻抗的变流器并联控制策略
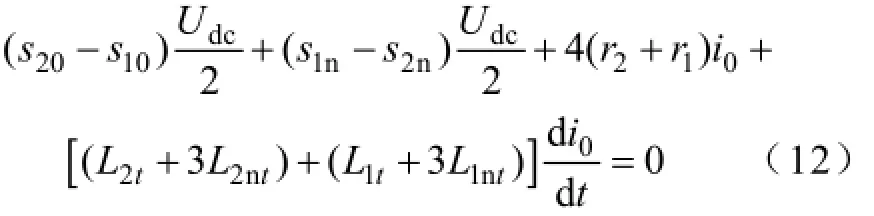
根据本文第2节的分析,本文提出了不平衡负载工况下的四桥臂变流器并联运行控制策略如图10所示。
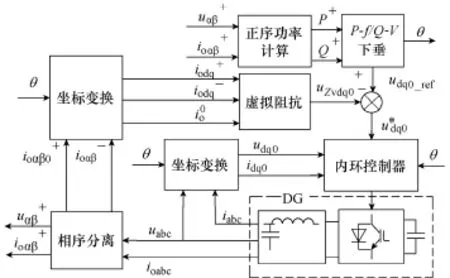
图10 四桥臂变流器并联运行控制策略框图Fig.10 Diagram of parallel control strategy of four-leg converters
控制策略在dq同步旋转坐标系下进行,控制结构由三部分组成:第一部分为基于正序功率的下垂控制环;第二部分为虚拟阻抗控制;第三部分为电压电流内环控制器。
3.1正序功率下垂控制
为了克服式(5)所示的功率脉动对下垂控制的影响,本文首先将变流器输出电压与输出电流进行正负序分解[15],由式(14)计算有功功率与无功功率为


式(14)中,θ0为变流器接入微电网系统时交流母线电压矢量的相位,一般定义为电压矢量与三相静止坐标系下A轴之间的夹角。
3.2正序虚拟阻抗
在中低压微电网系统中,虚拟阻抗常应用于微电网变流器的控制,通过变流器虚拟可控阻抗,改善变流器的输出阻抗特性,减小线路阻抗中阻性分量带来的功率耦合以及线路阻抗差异带来的电流分配不均问题,提高并联变流器的电流分配精度。在此,采用文献[16]的虚拟阻抗实现方法,并利用坐标变换可得
根据计算得到的正序有功功率,结合式(2)所示的下垂曲线,得到内环控制的电压幅值与角频率,坐标变换所需的角度由角频率积分得到

3.3不平衡分量虚拟阻抗
由2.2节分析可知,负载不平衡时的负序与零序电流分配易受系统参数偏差、线路阻抗影响。为克服这一问题,同样采用虚拟阻抗的思想来实现电流不平衡分量的分配。
以零序电流分配为例,可视为两个单相阻抗的均流,且独立于正序与负序控制,同时在1.3节中提到还可以利用零序虚拟阻抗抑制与负载电流分配无关的零序环流。与正序dq轴虚拟阻抗的实现有所差别,零序电流为单相正弦信号,若采用感性虚拟阻抗,ZV(s)=sL,若直接采用微分运算实现拉普拉斯算子s,将带来高频噪声,有可能影响系统稳定性,由于零序电流分配与下垂特性无关,将零序虚拟阻抗设置为阻性,则零序电阻同样可以起到增大零序环路阻抗、减小零序环流、提高负载不平衡时电流分配精度的作用。对应的零序虚拟阻抗压降为

增加零序虚拟电阻后的四桥臂变流器零序输出电压可以表示为


图11 加入虚拟阻抗的零序等效输出阻抗Fig.11 Zero sequence output impedance with virtual impedance

由式(20)可知,此时的负载零序电流分配几乎由采用虚拟阻抗后的变流器等效输出阻抗决定。同时也说明,只需通过调节和即可显著减小因线路阻抗差异导致的零序电流分配不均的问题。根据式(20)还可知,若不同容量的变流器并联运行,其对零序电流的分配必须满足

式中,Sk为第k台变流器的总容量;ZoVk为加入虚拟阻抗后的第k台变流器的等效输出阻抗。文献[16]结合功率分配精度以及功率解耦给出了正序虚拟阻抗的设计。在正序虚拟阻抗设计的基础上,零序与负序虚拟阻抗的设置可以遵循以下原则:
(1)虚拟阻抗要远大于线路阻抗,以减小线路阻抗对负载电流分配的影响。
(2)满足变流器的负载电流分配比例关系和精度需求。
(3)加入虚拟阻抗后引起的负载电压偏差和电压不平衡度要满足微电网系统的要求[17]。
与零序虚拟阻抗相似,本文采用负序虚拟电阻实现对负序电流的分配,将分解得到的负序电流分量变换至正序的dq坐标系下,乘以对应的虚拟电阻即可得到负序虚拟阻抗压降。最终电压控制环的电压指令可以表示为
3.4控制器实现
四桥臂变流器在孤岛微电网中的控制目标为电容电压平衡,内环控制如图12所示。采用传统的电容电压环,电感电流环级联的控制方式,控制在正序dq0坐标系下实现。图中uZvdq0为代表正序、负序以及零序虚拟阻抗压降之和。
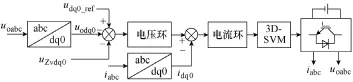
图12 内环控制框图Fig.12 Diagram of inner controller

由于负序电压分量在dq坐标系下为2倍基波频率脉动的交流量,仅采用PI调节器对其控制能力有限,为了在同步旋转坐标下同时对正序与负序分量控制,dq轴的电压控制器采用比例积分-谐振调节器(Proportional-integator-resonant, PIR)为式中,kp为比例系数;ki为积分系数;kr为谐振增益系数;ωc为截止频率;ωr为谐振调节器谐振角频率,此处ωr=2ω,即为下垂控制得到的基波角频率的2倍。由于零轴独立于dq轴,且零序电压以基波频率脉动,故采用比例谐振调节器(Proportional-Resonant, PR)进行控制,即

式中,kp0为零轴比例系数;kr0为零轴谐振增益系数,谐振角频率ω0为基波角频率,即ω0=ω,其余各量与式(22)相同。电流内环采用比例控制,即Gc(s)=kc,以加快系统动态响应,并提供一定的阻尼,增强系统的稳定性。电流环输出为调制波,通过三维空间矢量调制得到桥臂的驱动信号[18]。图13所示分别为采用表1与表2所示参数时,变流器dq轴与零轴电压闭环传递函数的Bode图(基波频率设定为50Hz)。由图13a可见,dq电压闭环传递函数在低频段以及100Hz处的增益为0dB,说明控制器能够准确的跟踪正序电压与负序电压指令;在图13b中,电压闭环传递函数在50Hz处为0dB,说明控制器能够实现对基波频率的零序电压的无静差控制。各个轴的PI调节器参数以及谐振调节器参数均能够保证系统的稳定性。
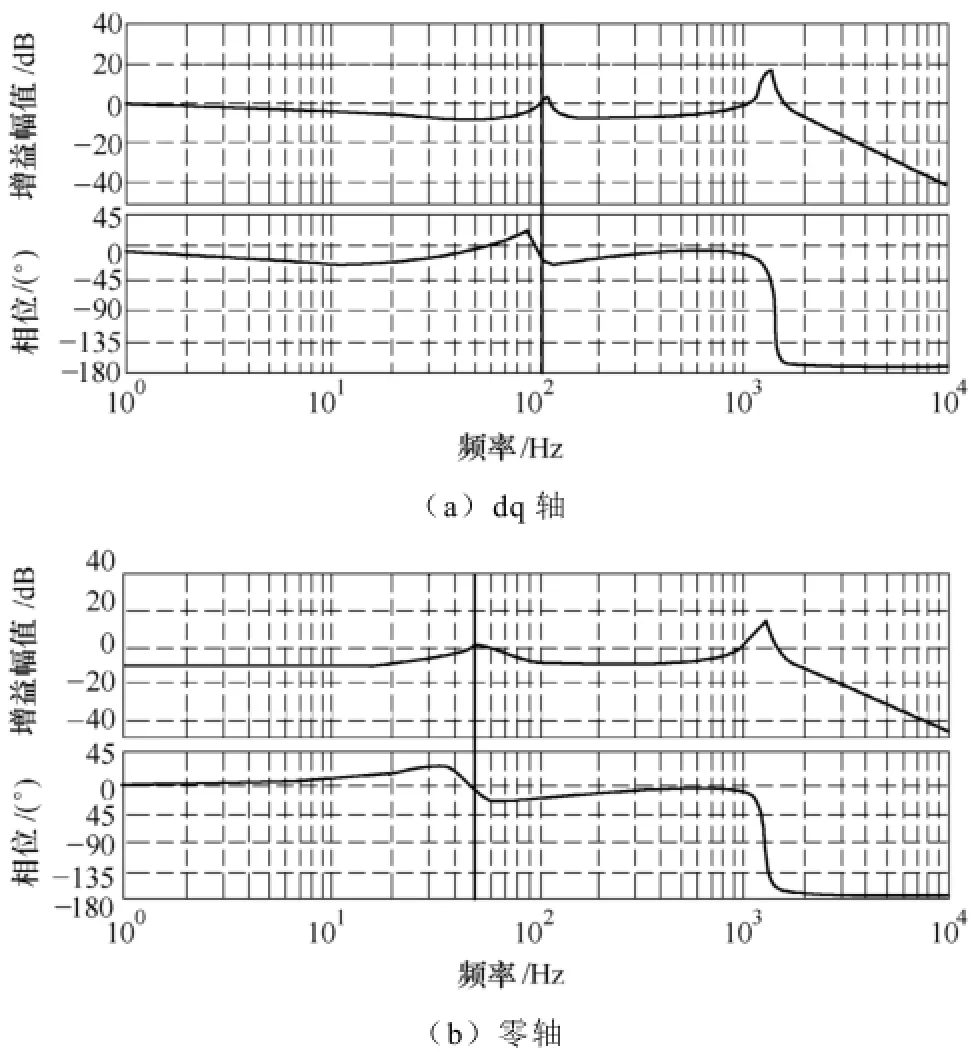
图13 dq轴与零轴电压闭环传递函数频域分析Fig.13 Frequency domain analysis of dq axes and zero axis voltage closed-loop transfer function
4 仿真与实验验证
4.1仿真研究
为验证四桥臂变流器并联控制策略的正确性和有效性,在Matlab仿真平台中搭建了由两台相同容量四桥臂变流器组成的仿真模型。变流器硬件参数与控制器参数分别如表1和表2所示。
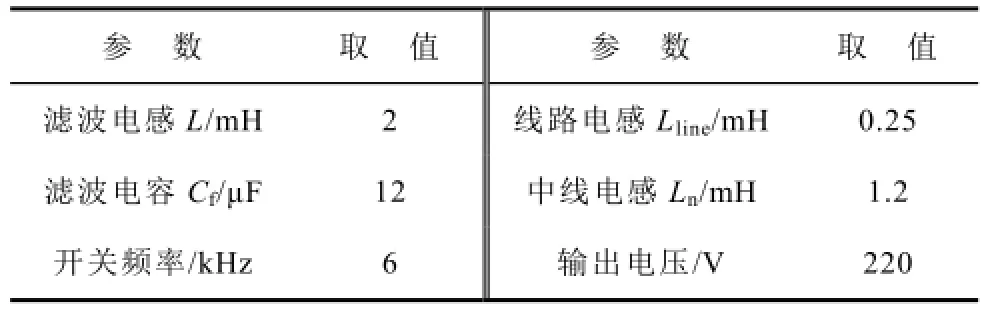
表1 变流器参数Tab.1 Parameters of converters

表2 控制器参数Tab.2 Parameters of controller
仿真中,变流器1(图中标识为DG1)的线路阻抗为250μH,变流器2(图中标识为DG2)的线路阻抗为500μH,两台四桥臂变流器共同为不平衡负载供电,其中A相带6kW阻性负载,B相和C相均为空载。图14所示为无负序和零序虚拟阻抗时的两台变流器输出电流仿真波形。由图可见,两台变流器的A相输出电流差异较大,而B相和C相则形成了环流,仿真结果说明两台变流器并没有很好地实现不平衡负载电流的准确分配。
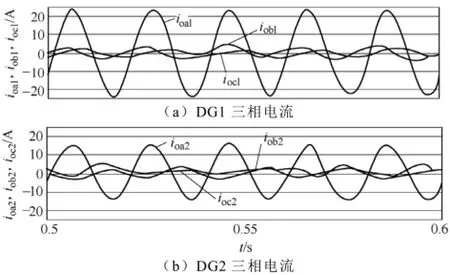
图14 无本文控制策略时负载不平衡时的变流器输出电流仿真结果Fig.14 Simulation result without proposed strategy:output current of two converters with unbalanced load
图15所示为采用本文提出的控制策略,加入负序与零序虚拟阻抗后的两台变流器输出电流与负序、零序电流幅值的仿真波形。由图15可知,在100%负载不平衡工况下,两台变流器能够对正序、负序以及零序电流进行准确的分配。

图15 采用本文控制策略时负载不平衡时的输出电流Fig.15 Simulation result with proposed strategy: output current of two converters with unbalanced load
4.2实验验证
为进一步验证本文所提出的不平衡负载下的四桥臂变流器并联控制策略,搭建了硬件实验平台。实验用变流器参数与仿真相同。实验中,为了加强两台变流器的差异,变流器1无线路电感,变流器2的线路电感为250μH,图16所示为平衡负载工况下仅采用基于正序下垂控制与虚拟电感时,两台变流器的A相电流与中线电流波形,此时各相均带16Ω阻性负载。由图16可见,即使在平衡负载下,各变流器中线中仍然存在与负载电流无关的零序环流,由于零序环流的存在,导致负载电流均分程度的变化。图17所示为A相负载不变,B相和C相空载时的A相电流与中线电流波形,可以看出,在不平衡负载工况下,A相电流存在分配不均的情况,同时中线的零序电流差异显著,说明没有实现负载不平衡时对零序电流的均流控制,且由于与负载电流分配无关的零序环流的存在,致使A相与中线的电流均发生了一定程度的畸变,甚至会导致系统的不稳定。
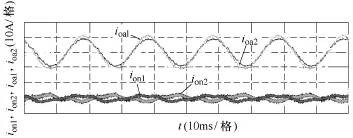
图16 无本文控制策略时负载平衡时变流器的输出电流Fig.16 Output and neutral current of two converters powering balanced load without proposed strategy
采用本文提出的不平衡负载虚拟阻抗并联运行策略后,三相平衡负载下的电流分配如图18所示。图中所示为两台变流器的A相电流与中线电流。
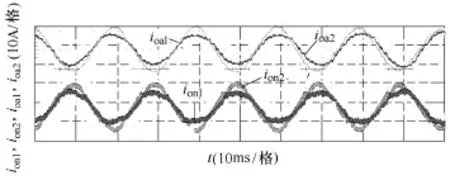
图17 无本文控制策略时负载不平衡时的变流器输出电流与中线电流Fig.17 Output and neutral current of two converters with unbalanced load without proposed strategy

图18 采用本文控制策略平衡负载时的输出电流与中线电流Fig.18 Output and neutral current of two converters with balanced load using proposed strategy
将图18与图16对比可知,平衡负载情况下的零序环流得到了有效的抑制,负载电流得到了合理的分配,中线电流仅含有3rd谐波等零序谐波组成的环流,且这些零序谐波环流较小,对负载电流分配的影响较弱。同样地,在A相带载(16Ω),B相与C相空载时的变流器输出电流波形如图19所示。
在图19a中,两台变流器的B相输出电流几乎为零,且A相电流得到了较好的均分。图19b所示为两台变流器的A相电流与中线电流,测量中设定以电流流出变流器为正,故中线电流与A相负载电流大小相等,相位相反,可以看出,无论是带载的A相,还是中线的零序电流,都得到了准确的分配。
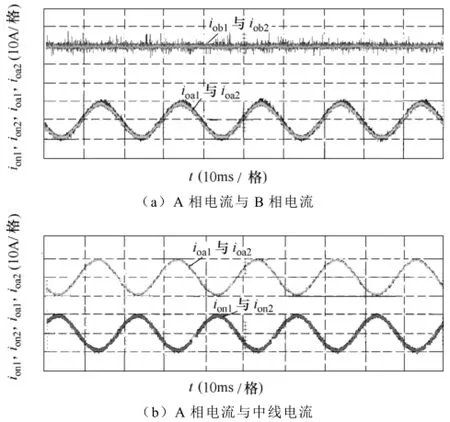
图19 采用本文控制策略负载不平衡时的输出电流Fig.19 Output and neutral current of two converters with unbalanced load using proposed strategy
以上实验结果说明,采用本文提出的基于虚拟阻抗的不平衡分量电流分配策略后,四桥臂变流器能够稳定的并联运行,在平衡与不平衡工况下均能够对负载电流实现合理的分配。图20所示为不平衡负载工况下运行时的变流器输出电压波形。
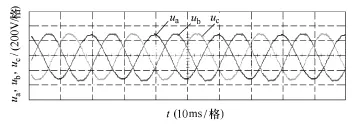
图20 负载不平衡时的变流器输出电压Fig.20 Output voltage of a converter with unbalanced load using proposed strategy
由图20可见,三相电压存在不平衡现象,其原因在于虽然虚拟阻抗的增加有助于变流器的负载电流分配,但是负序与零序电流在变流器等效输出阻抗上的压降随之增加。经测量图20所示三相电压负序不平衡度为1.45%,三相电压偏差小于额定电压的5%。尽管如此,并联系统提高不平衡电流分配精度与控制变流器输出电压不平衡程度的目标不能同时兼顾。因此,以电流分配为目标时,设置虚拟阻抗需要考虑在保证一定电流分配精度的情况下尽量保持输出电压的不平衡度在允许范围内。
5 结论
本文建立了三相四桥臂变流器在正序、负序以及零序下的并联系统等效电路模型。正序并联等效电路与平衡负载下的变流器并联系统一致,在线路阻抗呈感性的情况下,仍然可以采用传统下垂控制策略。对于负序与零序并联等效电路,其电流分配仅取决于变流器与负载之间的阻抗关系。通过建立四桥臂变流器开关函数模型,指出开关状态不一致是导致四桥臂变流器并联时环流产生的原因。滤波器及线路阻抗可以衰减环流中的高频分量,环流低频分量可以通过零序虚拟电阻加以抑制。在此基础上,本文提出了正序功率下垂与负序、零序虚拟阻抗相结合的四桥臂变流器并联控制策略。仿真与实验结果表明,提出的控制策略可以使四桥臂变流器并联系统在不平衡工况下稳定地为负载提供电能,实现对不平衡负载电流的准确分配,提高了微电网系统孤岛运行的可靠性。
[1] Rocabert J, Luna A, Blaabjerg F, et al. Control of power converters in ac microgrids[J]. Power Electronics, IEEE Transactions on, 2012, 27(11): 4734-4749.
[2] 王成山, 肖朝霞, 王守相. 微电网中分布式电源逆变器的多环反馈控制策略[J]. 电工技术学报, 2009, 24(2): 100-107.
Wang Chengshan, Xiao Zhaoxia, Wang Shouxiang. Multiple feedback loop control scheme for inverters of the micro source in microgrids[J]. Transactions of China Electrotechnical Society, 2009, 24(2): 100-107.
[3] 黄杏, 金新民. 微电网用分布式电源变流器下垂特性控制策略[J]. 电工技术学报, 2012, 27(8): 93-100.
Huang Xing, Jin Xinmin. A voltage and frequency droop control method for microsources[J]. Transactions of China Electrotechnical Society, 2012, 27(8): 93-100.
[4] He J W, Li Y W, Munir M S. A flexible harmonic control approach through voltage-controlled DG-grid interfacing converters[J]. Industrial Electronics, IEEE Transactions on, 2012, 59(1): 444-455.
[5] Wang X F, Blaabjerg F, Zhe Chen. An improved design of virtual output impedance loop for droopcontrolled parallel three-phase voltage source inverters [C]. Energy Conversion Congress and Exposition(ECCE), 2012 IEEE, Raleigh, NC, 2012: 2466-2473.
[6] Cheng Po-Tai, Chen Chien-An, Lee Tzung-Lin, et al. A cooperative imbalance compensation method for distributed-generation interface converters[J]. Industry Applications, IEEE Transactions on, 2009, 45(2):805-815.
[7] Savaghebi M, Jalilian A, Vasquez J C, et al. Autonomous voltage unbalance compensation in an islanded droop-controlled microgrid[J]. Industrial Electronics, IEEE Transactions on, 2013, 60(4): 1390-1402.
[8] De D, Ramanarayanan V. Decentralized parallel operation of inverters sharing unbalanced and nonlinear loads [J]. Power Electronics, IEEE Transactions on, 2010, 25(12): 3015-3025.
[9] 张佳佳, 石东源. 分布式电源用四桥臂变换器中点电压漂移控制[J]. 电工技术学报, 2013, 28(2):225-232.
Zhang Jiajia, Shi Dongyuan. Control of neutral point voltage shift for four-leg converter in distributed generation[J]. Transactions of China Electrotechnical Society, 2013, 28(2): 225-232.
[10] 孙驰, 鲁军勇, 马伟明. 一种新的三相四桥臂逆变器控制方法[J]. 电工技术学报, 2007, 22(2): 57-63.
Sun Chi, Lu Junyong, Ma Weiming. A novel control method for three-phase four-leg inverter[J]. Transactions of China Electrotechnical Society, 2007, 22(2): 57-63.
[11] Guerrero J M, Garcia De Vicuna L, Matas J, et al. Output impedance design of parallel-connected UPS inverters with wireless load-sharing control[J]. Industrial Electronics, IEEE Transactions on, 2005, 52(4):1126-1135.
[12] Zhang R. High performance power converter systems for nonlinear and unbalanced load/source[D]. Blacksburg: Virginia Polytechnic Institute and State University, 1998.
[13] 张兴, 陈玲, 杨淑英, 等. 离网型小型风力发电系统逆变器的控制[J]. 电力系统自动化, 2008, 32(23):95-99.
Zhang Xing, Chen Ling, Yang Shuying, et al. Inverter control of an isolated small scale wind power generation system[J]. Automation of Electric Power Systems, 2008, 32(23): 95-99.
[14] 王先为, 卓放. 三相四桥臂并联逆变器的零序电流建模与控制[J]. 西安交通大学学报, 2012, 46(10):8-14.
Wang Xianwei, Zhuo Fang. Modeling and control of zero sequence current in paralleled three-phase four-leg inverter[J]. Journal of Xian Jiaotong University, 2012, 46(10): 8-14.
[15] Rodriguez P, Timbus A V, Teodorescu R, et al. Flexible active power control of distributed power generation systems during grid faults[J]. Industrial Electronics, IEEE Transactions on, 2007, 54(5): 2583-2592.
[16] He J W, Li W Y. Analysis, design, and implementation of virtual impedance for power electronics interfaced distributed generation[J]. Industry Applications, IEEE Transactions on, 2011, 47(6): 2525-2538.
[17] 关雅娟, 邬伟扬, 郭小强. 微电网中三相逆变器孤岛运行控制技术[J]. 中国电机工程学报, 2011, 31(33): 52-60.
Guan Yajuan, Wu Weiyang, Guo Xiaoqiang. Control strategy for three-phase inverters dominated microgrid in autonomous operation[J]. Proceedings of the CSEE, 2011, 31(33): 52-60.
[18] 吴睿, 谢少军. 基于abc坐标系空间矢量控制的三相四桥臂电压源型逆变器研究[J]. 电工技术学报, 2005, 20(12): 47-52.
Wu Rui, Xie Shaojun. Research on the four-leg voltage source inverters based on space vector modulation in abc coordinates[J]. Transactions of China Electrotechnical Society, 2005, 20(12): 47-52.
Four-Leg Converter Based Unbalanced Load Sharing Method in Islanding Microgrid
Zhou Xiao Jin Xinmin Tang Fen Wu Xuezhi Tong Yibin
(National Active Distribution Network Technology Research Center Beijing Jiaotong University Beijing 100044 China)
The active power-frequency, reactive power-voltage based droop control is widely used in microgrids to share the load powers among converters. The conventional droop control method has not guaranteed the unbalance current sharing accuracy. To overcome the drawback above, the three-phase four-leg topology is adopted as a microgrid converter. The principle of unbalanced load current sharing and the causes of zero sequence circulating current are investigated. A negative and zero sequence virtual impedance based load sharing method is proposed in this paper, and it is integrated with positive sequence power droop controller. The negative and zero sequence currents are sharing reasonably according to virtual impedances in each sequence, which mitigate the effect of line impedance mismatch. Finally, the proposed control strategy is verified on a four-leg paralleled converters test rig. The experimental results show that the four-leg converters with the proposed method are operating stably in parallel and not only the unbalanced currents are sharing accurately, but also the zero sequence circulating current is suppressed effectively.
Microgrid, droop control, three-phase four-leg, unbalanced load, virtual impedance
TM464
周 啸 男,1986年生,博士研究生,研究方向为新能源发电技术。
2014-01-16 改稿日期 2014-06-21
金新民 男,1950年生,教授,博士生导师,研究方向为电力电子、交流传动、新能源发电、智能电网。
猜你喜欢
工友(2023年7期)2023-07-21 06:02:38
上海大中型电机(2021年2期)2021-07-21 03:01:36
西南交通大学学报(2018年6期)2018-12-18 02:22:18
测控技术(2018年10期)2018-11-25 09:35:38
电测与仪表(2016年8期)2016-04-15 00:30:16
通信电源技术(2016年4期)2016-04-04 02:57:12
电测与仪表(2015年16期)2015-04-12 00:44:34
电测与仪表(2014年19期)2014-04-04 12:06:22
电测与仪表(2014年19期)2014-04-04 12:06:16
电力工程技术(2014年6期)2014-03-20 14:19:40
