
基于直线感应电机负载的移动式无接触供电特性分析
2015-04-14 06:28:58史黎明张发聪姜龙斌李耀华
电工技术学报 2015年12期
蔡 华 史黎明 张发聪 姜龙斌 李耀华
基于直线感应电机负载的移动式无接触供电特性分析
蔡 华1,2史黎明1张发聪1,2姜龙斌1,2李耀华1
(1. 中国科学院电力电子与电气驱动重点实验室(中国科学院电工研究所) 北京 100190 2. 中国科学院大学 北京 100049)
采用移动式无接触方式为感应电机驱动等运动类设备的供电具有灵活、安全、环境友好等优点,文章提出了一种为直线感应电机驱动系统(LIMD)供电的移动式感应耦合供电(MICPT)系统,研究了LIMD作为MICPT系统负载的简化模型,以及MICPT在原边绕组恒流控制下不同互感和电机不同工况下的输出电压特性,提出将LIMD等效为一个可变电阻作为MICPT系统的负载进行供电特性分析的方法。基于MICPT供电的直线感应电机驱动系统实验装置实现了感应电机驱动实验车辆装置在移动式无接触供电下的往复运行控制,分析、仿真和实验验证了提出的供电方案及等效模型的正确性。
直线感应电机 恒流控制 谐振频率 移动式无接触供电 感应耦合
1 引言
近年来,无接触电能传输技术在国内外受到广泛关注[1]。移动式感应耦合电能传输(Movable Inductively Coupled Power Transfer, MICPT)系统,基于电磁感应原理,可实现用电设备与供电设备之间在静止或者运动状态下非物理接触的电能传输,相比传统的通过受电弓、第三轨、拖拉电缆等供电方式,具有很高的灵活性和良好的环境适应性,在运动供电场合具有优势。
在移动式无接触供电应用方面,文献[2]提出了磁悬浮列车的感应供电系统,用于磁浮列车在低速和静止时的车辆供电。文献[3]提出了用于轮轨列车的感应耦合供电系统,文献[4]研究了用于电动大巴车的无接触供电系统。
在无接触供电系统的基本模型、传输特性及功率控制方面,国内外在基础理论和应用方面都开展了研究[5-11]。但是以往模型中负载一般考虑的多是电阻负载,针对实际系统中更复杂的模块如整流桥、电机类负载等的研究较少。
本文面向移动式供电应用,首先提出为直线感应电机驱动系统(Linear induction motor drive, LIMD)供电的MICPT系统,然后研究LIMD作为MICPT系统负载的简化模型,以及MICPT在原边绕组恒流控制下不同互感和电机不同工况下的输出电压特性。最后提出将LIMD等效为一个可变电阻作为MICPT系统的负载,进行MICPT特性分析。
2 感应供电的直线感应电机系统
本文提出采用移动式感应耦合供电的方式给直线感应电机(Linear Induction Motor, LIM)供电,方案结构如图1所示。整个系统由无接触供电原边侧变流器、副边侧变流器、移动式无接触变压器、牵引逆变器及直线感应电机构成。原边侧变流器将三相交流电变换为单相高频电流通入无接触变压器的原边绕组。无接触变压器的副边感应出电压并通过副边变流器整流得到直流电,供给直线感应电机牵引系统。移动式无接触变压器的原边固定在地面上,副边固定在直线感应电机等运动负载上并随之运动[12]。

图1 直线感应电机移动式感应电能传输系统Fig.1 MICPT system for LIM
为了提高无接触供电系统的功率传输能力以及功率因数,在变压器的原边和副边设置电容与变压器自身电感构成谐振回路[6]。由于原边和副边均采用串联电容补偿时,谐振电容的容值选择与负载以及无接触变压器互感值无关[6],考虑到移动式无接触变压器运动中互感以及负载的变化,本文原边和副边均采用串联电容补偿。
本文提出的系统拓扑结构如图2所示。图中,Udc为三相整流后得到的直流电源,功率器件IGBT P1~P4构成全桥逆变器,Lp、Ls为无接触变压器原边和副边自感,M为变压器互感,Cp、Cs分别为原边和副边绕组的串联补偿电容,Rp、Rs代表原边和副边绕组线路内阻,二极管D1~D4构成高频不控整流桥,经过电容Cdc1、Cdc2滤波后,得到较为稳定的直流电源URL,由IGBT T1~T6构成的牵引逆变器驱动直线感应电机运行。
串联电容补偿下,谐振频率fr与变压器电感、谐振电容的关系如式(1)所示。

本文采用的移动式变压器绕组结构的原边为特殊设计的长矩形无磁芯线圈,副边绕组采用一种特殊夹层磁芯结构的矩形线圈。本文的实验装置见图3,由原边侧变流器、移动式无接触变压器、副边侧变流器、牵引逆变器、直线感应电机及其他结构件构成。原边绕组长1600mm、宽100mm,副边绕组长560mm、宽100mm,电磁间隙10mm~30mm可调。

图3 移动式无接触供电实验平台Fig.3 Experimental platform of MICPT
3 直线感应电机牵引系统直流侧等效模型
首先研究电机驱动系统的等效模型及其特性。由于直线感应电机等效电感L及时间常数L/R很小,这里采用电阻和反电势串联等效电路RL-eL作为其直流侧负载模型见图4[13]。

图4 直线感应电机驱动系统等效电路模型Fig.4 Equivalent circuit model of LIMD
图4 中,

式中电阻R的参数值与三相交流侧中的相同,该近似模型的等效输入电阻
式中,β=eL/uRL,当β<1时,直流侧等效负载表现为电阻;当β=1(eL=uRL)时,iRL=0,相当于直流侧等效电阻无穷大;当β>1时,直流侧等效负载表现为负阻,即电机处于再生制动状态。
另外,从近似等效模型中,得到电动势eL:

其中,m为逆变器PWM调制的调制系数;ρ为逆变器输出端电压与感应电机定子侧等效反电势之比,又称作交流反电势幅度因数,与负载电流大小有关,一般小于但接近1[13]。
4 移动式无接触供电系统特性
4.1MICPT系统等效模型
为了便于分析,采用基波等效模型[14]把图2所示的拓扑结构进行简化等效。原边侧变流器将直流电源逆变后输出为方波,可等效为一个电压源Up。
其中,a为移相角,a=0~180°。
电机驱动系统稳态下可简化为电阻RL,其大小与逆变器工作参数及电机牵引工况有关。
对于不控整流桥,可进一步等效为一个等效电阻Re,在谐振电流接近正弦的情况下,有

根据上述分析,原边和副边均串联电容进行补偿时的系统基波等效模型如图5所示。
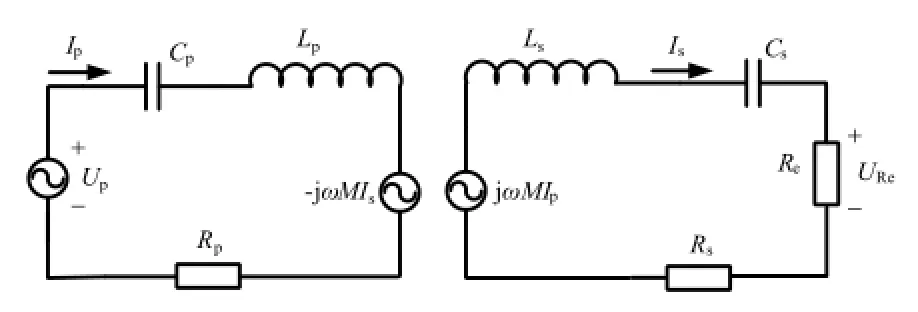
图5 串串电容补偿下MICPT等效电路Fig.5 Equivalent circuit of MICPT with serial capacitance on both sides
根据图5所示的等效电路可得次级开路电压:

其中,ω=2πf,ω为电流角频率,f为电流频率。
根据分压公式,等效电阻Re上电压为:

完全谐振时等效负载上电压为:

额定负载下,一般要设计次级谐振电流接近正弦。负载电压为

经推导在副边谐振频率下,空载电压与额定电压之比为:

4.2MICPT系统等效模型
电机驱动系统具有停机、电机启动、正反转、制动等工况,针对各工况分析如下:
(1)当电机驱动系统不工作时,相当于负载电阻趋于无穷大,MICPT输出电压URL为副边开路输出电压的峰值。
(2)当电机工作时,随着负载的增大,直流侧等效电阻变小,考虑到线路内阻影响,输出电压会降低。
(3)在电机反转或制动时,电机向逆变器直流母线回馈电能,使母线电压上升。
(4)电机驱动系统停止工作后,负载相当于无穷大,输出电容电压又会充电至峰值电压。
以下对以LIMD为负载的MICPT系统进行仿真分析。所用的直线感应电机参数如下:初级绕组电阻0.82Ω,次级反应板等效电阻3.14Ω,初级漏感13.45mH,励磁电感7.52mH,次级漏感0.81mH,极距51mm,具体见文献[15],MICPT的参数见表1。无接触变压器原边绕组电流闭环控制在平均值20A,电机驱动系统采用变压变频控制。

表1 计算和实验参数Tab.1 Computation and experiment parameters
(a)电机驱动过程
在0~0.1s时初级绕组电流平均值从0递增到20A,在0.5s~1s期间电机匀速启动,驱动频率从2Hz递增到10Hz,1s~1.5s期间电机驱动频率稳定在10Hz。在1.25s时给电机施加反向电压,在1.5s~2s期间驱动频率从10Hz递减到2Hz,在2.05s让电机驱动系统停止工作。仿真波形见图6,其中(a)为原边绕组电流平均值;(b)MICPT输出电压;(c)电机三相绕组电流。
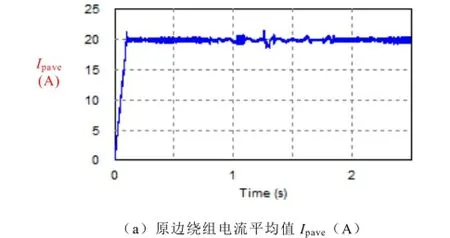
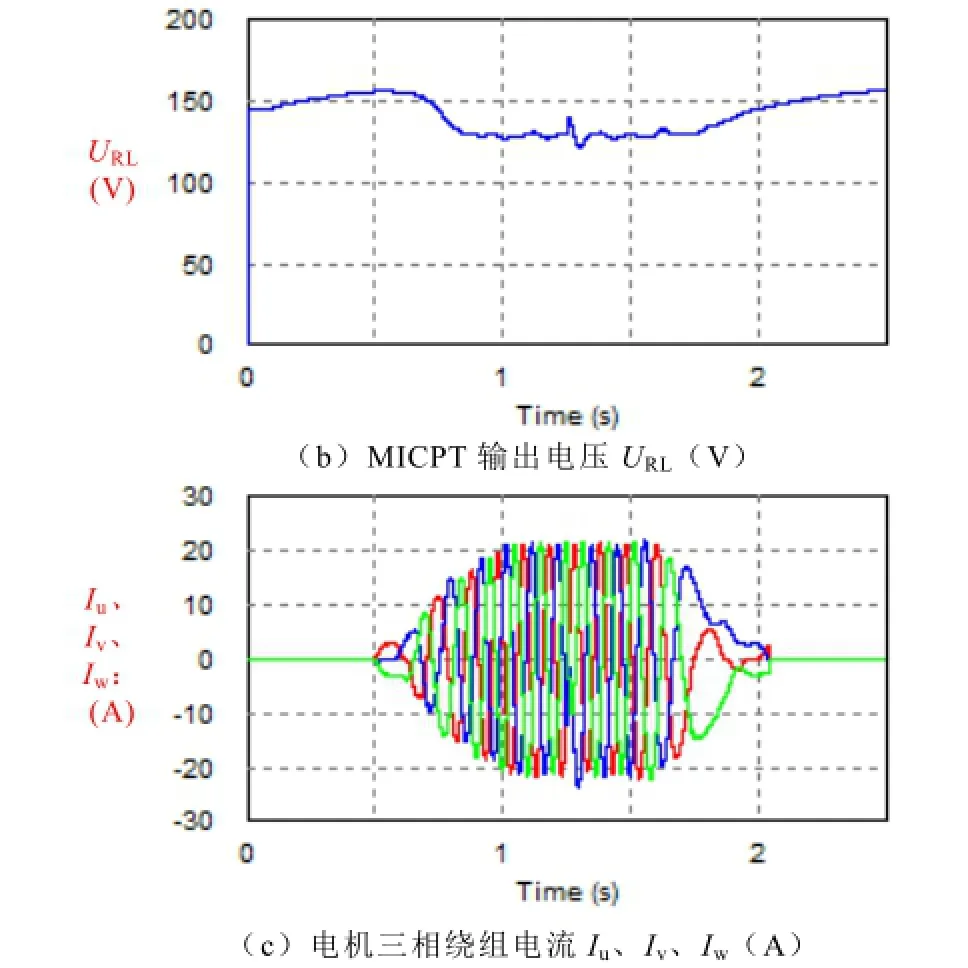
图6 MICPT为LIMD供电时的仿真结果Fig.6 Simulation results of MICPT supplying for LIMD
在电机驱动系统未工作前,MICPT空载输出电压URL稳定后约为173V。在电机启动后,电压URL有所下降,在电机达到给定频率时,电压为127V,电机平稳运行,此时MICPT输出电压稳定。在突然给电机施加反向电压时,电机给母线回馈电能,母线电压上升到140V,随后又有所下降。随着电机减速到停机,电压URL逐渐上升到次级感应电压的峰值。空载电压与稳定运行时电压之比大约为1.36,和分析的式(10)基本一致。
(b)负载变化
用一个可变电阻来代替电机驱动系统,在同样MICPT工作条件下,研究输出电压的变化情况。在电机驱动系统不工作时,由于有50kΩ的电容放电电阻,所以等效电阻最大为50kΩ。在电机稳定运行后,其等效的阻值大约为20Ω,反向运行时,等效负载设置为-20Ω。随着电机减速,等效电阻逐渐增加到50kΩ。根据各阶段的估算电阻值,仿真负载电压波形见图7。其中(a)为原边绕组电流平均值,(b)MICPT输出电压,(c)可变电阻。
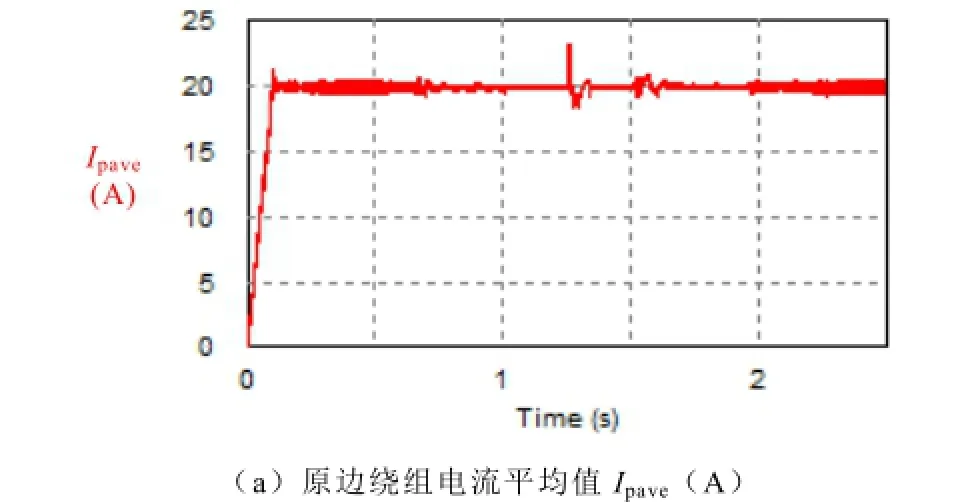
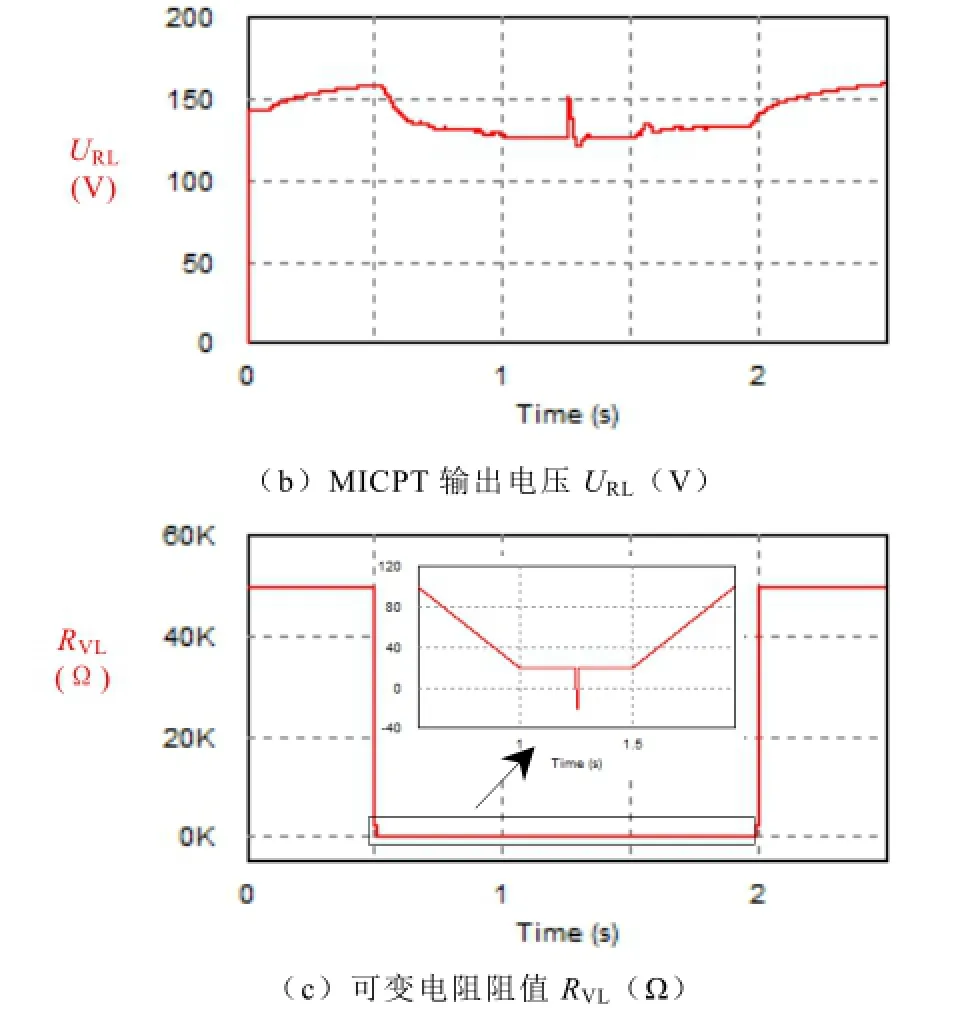
图7 可变电阻作为MICPT负载仿真波形Fig.7 Simulation waveform of variable resistance as the load
由图7可知,随着电阻的减小,输出电压降低;在电阻为负值时,输出电压会有一个上升过程。随着电阻的增大,输出电压又会上升到峰值电压。可变电阻作为负载时,输出电压URL的变化规律同MICPT带电机驱动系统负载时基本一致,因此电机驱动系统作为MICPT的负载时可用一个可变电阻近似等效来分析MICPT的系统特性。
5 实验
实验装置见图3,原边侧变流器采用基于谐波的移相全桥控制[10],采用谐振电流闭环控制,给定原边绕组电流平均值20A。与仿真不同的是,直线感应电机运动时会带动副边绕组运动,无接触变压器的原边和副边发生相对运动,其互感发生变化,根据式(7)~(10)输出电压与互感成正比。
电机驱动频率递增,稳定大约4s后,在5.8s时刻突加反向电压,稳定大约4s后,驱动频率递减,在14.3s电机驱动系统停止工作。图8所示为MICPT供电下LIM运动时的实验波形,其中Iu、Iv为电机绕组两相电流,URL为MICPT输出电压,IRL为MICPT输出电流,Ip为原边侧变流器电流。从图8(a)可知,电压URL从初始时的144V,逐渐下降到平稳运行时的100V,随着位置的变化,互感降低,造成输出电压进一步下降到78V,给电机反向施压减速停机后,电压URL逐渐上升到电压125V以上,受电容充电速度影响,电压上升较慢。图8(b)为突加反压时的放大波形,可以看出此时输出电压有一个上升过程,这是因为电机反转时向直流母线电容回馈了电能。图8(c)为电机驱动频率10Hz稳定运行电压URL=78V时(A点)的放大波形。
图8 MICPT供电下的LIMD实验结果Fig.8 Experimental results of LIMD supplied by MICPT
为了验证电机驱动系统作为MICPT的负载可用电阻来等效,用一个23.3Ω的电阻来替代电机驱动系统。推动直线感应电机次级动子按照电机运行的速度往返运动一次。实验结果如图9所示,从图9(a)可以看出次级运动一个往返,输出电压URL的变化范围为73V~104V,这里由于无接触变压器气隙不均匀等因素,造成在无接触变压器两端互感值差距较大。图9(b)为输出电压URL=78V(B点)的放大波形。通过图8(c)和图9(b)对比发现,二者几乎一样,说明用电阻来等效直线感应电机驱动系统,对于MICPT系统来说与实际电机负载基一致。
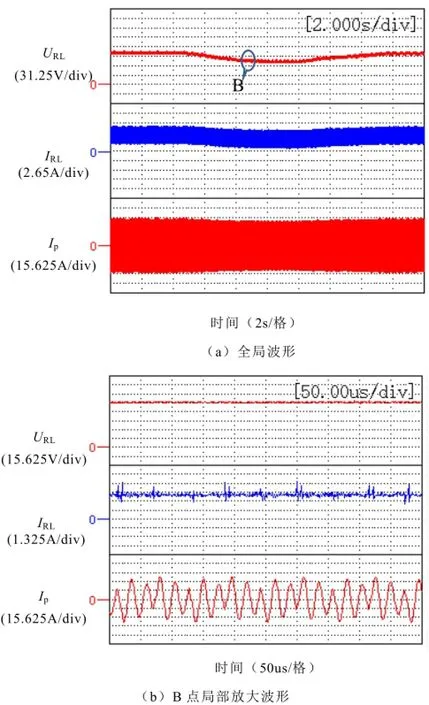
图9 负载为23.3Ω时MICPT供电的实验波形Fig.9 Experiment waveform with resistance as the load
通过图9可知,由于互感的变化,输出电压最高值和最低值差21V。图8中,抵消互感的变化后,负载为电机驱动系统时,输出电压最低时为(78+21)V=99V,空载时输出电压为144V,空载和额定电压比为1.45,略大于4/π,这是由于内阻因素以及电流频率和实际的谐振频率不完全相等造成的,该现象为实际控制提供了依据。
6 结论
以直线感应电机驱动系统作为负载,建立了移动式感应电能传输供电方案,对其特性进行了深入分析。主要结论是:(1)将电机驱动系统等效为一个可变电阻作为系统负载,对MICPT系统特性进行实时分析是可行的;(2)考虑电机系统直线运动时无接触变压器的互感变化,副边母线空载电压与额定负载电压比会超过4/π,直线感应电机稳定运行时直流母线电压相对稳定。
仿真和实验结果表明所提方案以及等效方法可行。本文所提方法可为轨道交通车辆的移动式无接触供电系统设计、供电控制提供参考。
[1] 黄学良, 谭林林, 陈中, 等. 无线电能传输技术研究与应用综述[J]. 电工技术学报, 2013, 28(10): 1-11.
Huang Xueliang, Tan Linlin, Chen Zhong, et al. Review and research progress on wireless power transfer technology[J]. Transactions of China Electrotechchnical Society, 2013, 28(10): 1-11.
[2] Bauer M, P. Becker, Q. Zheng. Inductive power supply (IPS®) for the transrapid[C]. Proc. of Magnetically Levitated Systems and Linear Drives, Dresden, Germany, 2006.
[3] Winter J, Mayer S, Kaimer S, Seitz P, et al. Inductive power supply for heavy rail vehicles[C]. Third International Electric Drives Production Conference (EDPC), Nuremberg, Germany, 2013.
[4] Huh J, Lee S W, Lee W Y, et al. Narrow-width inductive power transfer system for online electrical vehicles[J]. Power Electronics, IEEE Transactions on, 2011, 26(12): 3666-3679.
[5] 孙跃, 夏晨阳, 苏玉刚, 等. 导轨式非接触电能传输系统功率和效率的分析与优化[J]. 华南理工大学学报: 自然科学版, 2010, 38(10): 123-129.
Sun Yue, Xia Chen yang, Su Yu gang, et al. Analysisand Optimization of Transmission Power and Efficiency for Rail Type Contactless Power Transfer System[J]. Journal of South China University of Technology (Natural Science Edition). 2010, 38(10): 123-129.
[6] Wang C S, Covic G A, Stielau O. Power transfer capability and bifurcation phenomena of loosely coupled inductive power transfer systems[J]. IEEE Transactions on Industrial Electronics, 2004, 51(1):148-157.
[7] 李阳, 杨庆新, 闫卓, 等. 磁耦合谐振式无线电能传输系统的频率特性[J]. 电机与控制学报, 2012, 16(7): 8-11.
Li Yang, Yang Qingxin, Yan Zhuo, et al. Characteristic of frequency in wireless power transfer system via magnetic resonance coupling[J]. Electric machines and control, 2012, 16(7): 8-11.
[8] 孙跃, 夏晨阳, 戴欣, 等. 感应耦合电能传输系统互感耦合参数的分析与优化[J]. 中国电机工程学报, 2010, 30(33): 44-50.
Sun Yue, Xia Chenyang, Dai Xin, et al. Analysis and optimization of mutual inductance for inductively coupled power transfer system[J]. Proceedings of the CSEE, 2010, 30(33): 44-50(in Chinese).
[9] 戴欣, 孙跃, 苏玉刚, 等. 非接触电能双向推送模式研究[J]. 中国电机工程学报, 2010, 30(18): 55-61.
Dai Xin, Sun Yue, Su Yugang, et al. Study on contactless power bi-directional push mode[J]. Proceedings of the CSEE, 2010, 30(18): 55-61.
[10] Hua Cai, Liming Shi, Yaohua Li, Harmonic-Based Phase-Shifted Control of Inductively Coupled Power Transfer Power Electronics[J]. IEEE Transactions on, 2014, 29(2): 594-602.
[11] J. L. Villa, J. Sallan, A. Llombart, et al. Design of a high frequency inductively coupled power transfer system for electric vehicle battery charge[J]. Appl. Energy, 2009, 86(3): 355-363.
[12] 王珂, 史黎明, 何晋伟, 等. 单边直线感应电机法向力牵引力解耦控制[J]. 中国电机工程学报, 2009, 29(6): 100-104.
Wang Ke, Shi Liming, He Jinwei, et al. A Decoupling Control of Normal-and-thrust Forces in Single-sided Linear Induction Motor[J]. Proceedings of the CSEE, 2009, 29(6): 100-104.
[13] 张加胜, 张磊. PWM逆变器的直流侧等效模型研究[J]. 中国电机工程学报, 2007, 27(4): 103-107.
Zhang Jiasheng, Zhang Lei. Research on the DC-side Equivalent Model of PWM Inverters[J]. Proceedings of the CSEE, 2007, 27(4): 103-107.
[14] 张卫平. 开关变换器的建模和控制[M]. 北京: 中国电力出版社, 2005: 258-262.
Zhang weiping. Modeling and control of switch converter[M]. Beijing: China Electric Power Press, 2005: 258-262.
[15] 何晋伟, 史黎明. 一种基于静态特性的直线感应电机参数辨识方法[J]. 电工电能新技术, 2009, 28(4):50-53.
HE Jinwei, SHI liming. An identification method for linear induction motor parameter based on static characteristics[J]. Advanced Technology of Electrical Engineering and Energy, 2009, 28(4): 50-53.
Characteristics Analysis of Movable Inductively Coupled Power Transfer with Linear Induction Motor Drive
Cai Hua1,2Shi Liming1Zhang Facong1,2Jiang Longbin1,2Li Yaohua1
(1. Key Laboratory of Power Electronics and Electric Drive, Institute of Electrical Engineering Chinese Academy of Sciences Beijing 100190 China 2. University of Chinese Academy of Sciences Beijing 100049 China)
As the power supply of movable load such as linear induction motor (LIM), movable inductively coupled power transfer (MICPT) system is flexible, security, and environment friendly. A power supply scheme with MICPT for linear induction motor drive (LIMD) system is proposed. The equivalent characteristic of LIMD as the load of MICPT is analyzed. The output voltage characteristic of MICPT is studied when the current of the primary winding is kept constant, including the affection of contactless transformer mutual inductance and motor different operation modes. A variable resistance adopted to equivalent circuit of the LIMD as the load of MICPT is proposed. An experiment setup with LIMD system powered by MICPT is built. The LIM can move steadily along the rail with movable contactless power supply. Analyses, simulation and experimental verify the correctness and feasibility of the proposed scheme and equivalent model.
Linear induction motor, constant current control, resonant frequency, movable contactless power transfer, inductive coupled
TM46
蔡 华 男,1987年生,博士研究生,研究方向为无线电能传输和电力电子变换技术。
2014-08-10
史黎明 男,1964年生,研究员,博士生导师,研究方向为特种电机和驱动控制、新型轨道交通牵引供电、电能无线传输技术。
猜你喜欢
中学生数理化·中考版(2020年10期)2020-11-27 01:59:46
中学生数理化·中考版(2018年11期)2019-01-31 06:18:04
制造技术与机床(2017年3期)2017-06-23 08:11:52
电子制作(2017年1期)2017-05-17 03:54:12
照明工程学报(2016年3期)2016-06-01 12:18:01
电测与仪表(2016年2期)2016-04-12 00:24:42
通信电源技术(2016年5期)2016-03-22 01:09:59
肿瘤预防与治疗(2015年1期)2015-09-26 07:26:23
云南电力技术(2015年2期)2015-08-23 01:31:52
水电站机电技术(2014年1期)2014-09-26 11:59:53
